基于自適應粒子群優化算法的串聯復合渦輪儲能優化策略
2024-03-21 02:25:04張珊珊鄔斌揚蘇萬華
計算機應用 2024年2期
王 震,張珊珊,鄔斌揚,蘇萬華
(天津大學 內燃機燃燒學國家重點實驗室,天津 300072)
0 引言
近年來,隨著社會經濟的迅猛發展,能源需求持續升級,進一步凸顯了能源短缺問題的嚴峻性。內燃機作為車輛、船舶以及其他運輸工具的主要動力設備,是化石能源消耗的重要途徑之一,因此,提升內燃機的熱效率成為實現節能減排和緩解能源危機的有效途徑。眾多調查研究表明,內燃機工作過程中存在大量能量損耗,主要以余熱形式排放至大氣環境[1]。鑒于發動機排氣具備較高的溫度和壓力特性,它的能量品質較高,具有巨大的回收潛力[2],因此,高效回收利用發動機排氣能量已成為提高內燃機整體熱效率的關鍵所在。
在眾多排氣能量回收技術中,串聯復合渦輪發電技術因其對原發動機改動最小、成本最低的特點,被認為是最具潛力應用于汽車領域的余熱回收技術[3];然而,發動機排氣能量隨著發動機運行工況的變化表現出顯著的非線性和非穩態特性,這為后端儲能單元回收并儲存電能帶來了巨大挑戰。
為了實現發電系統最大輸出功率的跟蹤,趙夢玨[4]提出了擾動觀測(Perturbation and Observation,P&O)法,此方法因簡潔易行、控制便捷和硬件成本較低等優勢,在多種實際工況中得到廣泛應用。李畸勇等[5]針對光伏電池的特性,提出了基于電導增量的最大功率點追蹤(Maximum Power Point Tracking,MPPT)方法,該方法在不同光照和溫度條件下均能較好地追蹤到最大輸出功率點。郭金智等[6]通過引入最優變步長系數,對變步長電導增量法提出了改進控制策略。研究結果顯示,該方法能夠有效解決傳統電導增量法在追蹤速度與最大功率點(Maximum Power Point,MPP)輸出穩定性方面的平衡問題,提升了系統的綜合跟蹤性能。上述MPPT控制方法在穩態環境下具有較好的追蹤性能;然而,由于發動機運行工況呈現較強的時變特性,這些MPPT 控制方法容易陷入局部最優解,甚至出現追蹤失效的狀況,因此不適合作為發動機復合渦輪發電系統MPPT的控制算法。
人工神經網絡(Artificial Neural Network,ANN)憑借解決非線性和復雜問題方面的優勢,在MPPT 系統中得到了廣泛應用。Messalti 等[7]將ANN-MPPT 運用于光伏發電系統以提取最大輸出功率,仿真結果表明,ANN-MPPT 系統在追蹤精度、響應時間以及超調量控制方面均表現出色。針對風力發電轉換系統發電工況的隨機多變特性,Chandrasekaran 等[8]采用級聯神經網絡(Cascaded Neural Network,CNN)結構設計MPPT 控制器,以提高系統的動態追蹤性能。張曉強等[9]利用光伏發電系統的輸出特性,提出了一種用于更好追蹤最大輸出功率的自適應神經網絡控制算法。然而,基于神經網絡算法的控制方法存在一定局限性,如網絡結構難以確定,追蹤精度嚴重依賴于訓練數據集的數量,訓練過程較為繁瑣耗時等,因此,在將MPPT 技術應用于串聯復合渦輪發電系統方面仍存在一定的挑戰。MPPT 技術已顯著提升了前端發電功率的追蹤效率。為了進一步提高后端能量轉換效率,Gabash 等[10]采用混合儲能系統(Hybrid Energy Storage System,HESS),通過結合不同儲能裝置的優勢,替代傳統的單一儲能設備,以實現更加高效穩定的電能存儲。唐西勝等[11]利用鉛酸蓄電池與超級電容器建立了HESS,相較于單一蓄電池儲能,具有更高的響應速度和更長的使用壽命。然而,被動型HESS 無法實現對功率流動的主動控制,難以達到最佳效果。Gu 等[12]提出了將高低通濾波器與HESS 相結合,以實現高低頻功率的分配。但未考慮電池荷電狀態(State Of Charge,SOC)范圍的控制,過度的充放電會嚴重損害電池健康。為了確保蓄電池和超級電容器工作在合適的SOC 范圍內,Hredak 等[13]提出了一種HESS 的模型預測控制系統,實驗結果表明,該控制系統能確保各儲能元件均保持在健康的SOC 范圍內,很好地應對環境變化帶來的功率變化。現有研究表明,利用MPPT 技術可以提高發電系統的功率捕獲能力,從而提高發電效率。混合儲能HESS 技術能夠滿足高效、穩定存儲電能的后端要求。這些技術已廣泛應用于光伏發電和風力發電領域[14]。然而,將MPPT、HESS 等方法與發動機串聯復合渦輪發電技術相結合的報道卻較為罕見。
綜上所述,針對發動機串聯復合渦輪發電系統發電功率波動性較大的問題,本文提出了一種基于自適應粒子群優化(Self-Adaptive Particle Swarm Optimization,SAPSO)算法的MPPT 控制方法,以提高發電效率,并在系統后端引入基于功率分配優化控制原理的HESS,提高電能存儲效率。本文首先闡述了發動機串聯復合渦輪發電技術的研究背景,并提出了關于如何高效回收發動機排氣能量的關鍵問題。其次,依據Y24 型發動機建立了串聯復合渦輪發電系統的仿真模型。接著,提出了一種改進的粒子群優化算法MPPT 與基于功率分配優化HESS 相結合的儲能優化控制策略,并對所提出的儲能優化策略進行了Matlab/Simulink 的仿真驗證分析。最后,本文通過設置三組系統配置進行實驗,驗證了所提出的基于改進粒子群算法的儲能優化控制方法。實驗結果表明,相較于傳統控制方法,在設置工況下,本文提出的儲能優化策略可以有效提高系統發電效率,同時提高了發動機整體熱效率。結果證明了本文所提算法的有效性和優越性。
1 串聯復合渦輪發電系統工作原理及建模
1.1 串聯復合渦輪發電系統工作原理
圖1 展示了發動機串聯復合渦輪發電系統的結構簡圖。該系統由汽油均值壓燃(Homogeneous Charge Compression Ignition,HCCI)發動機、廢氣渦輪增壓器、動力渦輪、發電機、整流器(AC/DC)、直流變換器(DC/DC)和能量存儲單元組成。
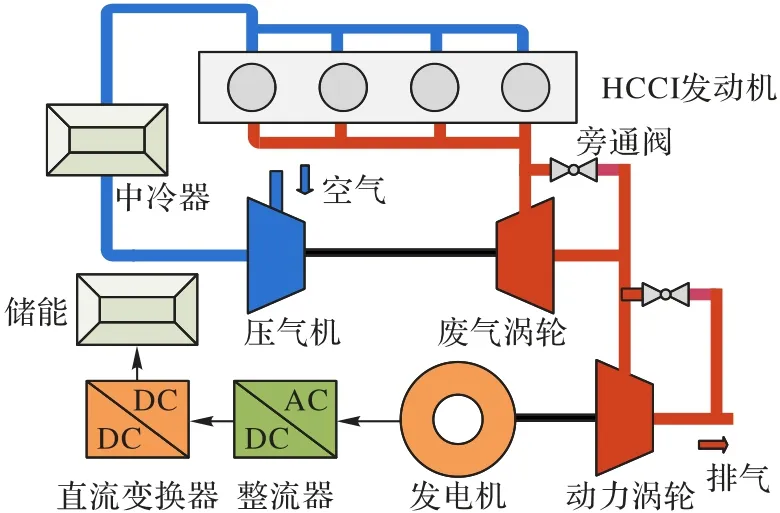
圖1 發動機串聯復合發電系統的結構簡圖Fig.1 Structure sketch of engine tandem composite power generation system
在發動機串聯復合渦輪發電系統中,發動機排氣首先通過廢氣渦輪增壓器為發動機提供增壓空氣,排氣從廢氣渦輪流出后進入動力渦輪,帶動與動力渦輪同軸連接的發電機進行發電。所產生的交流電經過整流、穩壓等處理后被存儲至儲能單元。
1.2 發動機串聯復合渦輪建模
本研究選取了改裝后的Y24 型汽油HCCI 發動機作為發電系統前端的研究對象,系統各部分參數詳見表1。借助GT-POWER 仿真軟件,建立了包含汽油HCCI 發動機、廢氣渦輪增壓器以及動力渦輪的一維仿真模型。在模型中,發動機的進出口邊界條件均設定為標準大氣環境,而缸內燃燒模型則采用了放熱率模型。此外,廢氣渦輪增壓器和動力渦輪均基于所選樣機的map 圖模型進行建模。
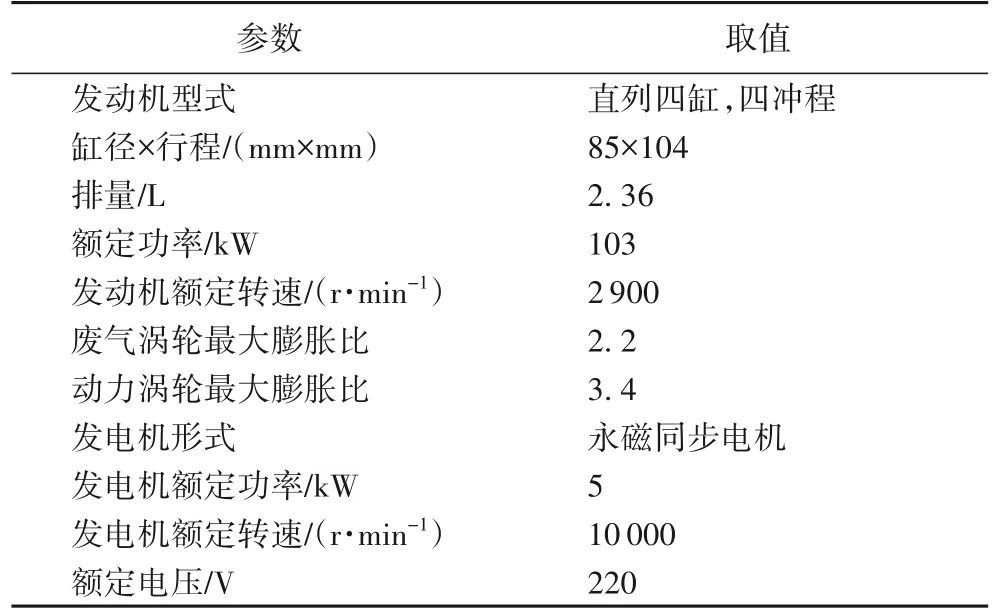
表1 發動機串聯復合發電系統主要技術參數Tab.1 Main technical parameters of engine tandem composite power generation system
1)發動機模型。
假設噴入缸內燃料完全燃燒的情況,根據發動機缸內能量守恒[15],可以得到
由缸內質量守恒定律可知,排氣流量可表達為
式中:mf為噴入氣缸燃油質量;cp,a、cp,e分別為進、排氣定壓比熱容;Ql為燃油低熱值;TT為廢氣渦輪入口溫度;ma、me分別為進、排氣流量;Ta為環境溫度;ηme為發動機機械效率;be為有效油耗率;?az為實際空燃比。
2)串聯復合渦輪模型。
廢氣渦輪輸出功率以及壓氣機吸收功率可分別表達為:
根據能量平衡,建立廢氣渦輪與增壓器功率平衡方程式:
考慮發動機排氣在動力渦輪中進行等熵膨脹過程,動力渦輪入口溫度可表達為:
動力渦輪輸出功率為:
式中:PT、Pc分別為廢氣渦輪、壓氣機功率;ηT為廢氣渦輪效率;κa、κe分別為進、排氣定熵指數;πT、πc分別為廢氣渦輪、壓氣機膨脹比;ηmt為廢氣渦輪機械效率;Tp為動力渦輪入口溫度;PP、Pa分別為動力渦輪進、出口壓力;πP為動力渦輪膨脹比;ηP為動力渦輪效率。
1.3 永磁直線同步電機建模
永磁線性同步電機(Permanent Magnet Linear Synchronous Motor,PMLSM)的數學模型主要包括機械運動方程、電壓方程、推力方程和磁鏈方程[16]。
在d,q旋轉坐標系下:
根據牛頓第二定律,機械運動方程可表達為:
式中:FL為外部推力;Fe為電磁推力;M為動子質量;B為黏滯摩擦系數,v為動子速度,p為微分算子。
電磁推力方程為:
式中:ψf為永磁體勵磁磁鏈;id、iq分別為d、q軸電流;Ld、Lq分別為PMLSMd、q軸電感;τ為極距。
磁鏈方程為:
式中:ψd、ψq分別為d、q軸磁鏈。
考慮到電機旋轉中會產生反電動勢,PMSLM 電壓方程可表達為:
式中:Ud、Uq分別為d、q軸電壓;Rs為定子電阻。
1.4 基于串聯復合渦輪發電的優化控制系統模型
發動機串聯復合渦輪發電優化控制系統模型主要分為發電系統前端、控制系統中端和儲能系統后端3 個部分,原理如圖2 所示。發電前端包括HCCI 發動機、動力渦輪和發電機。控制中端由三相二極管橋式整流器、Boost 轉換器和MPPT 控制器組成,通過實時采集直流側電流(Idc,r)電壓(Udc,r),輸出適當占空比(dop)的脈沖寬度調制(Pulse Width Modulation,PWM)波控制信號控制DC/DC 中的絕緣柵雙極型晶體管(Insulated Gate Bipolar Transistor,IGBT),以實現在當前發電工況下向直流母線輸出最大發電功率。儲能后端涉及蓄電池、超級電容器、雙向DC/DC 和HESS 充放電控制器。通過對母線上需求功率(Pneed)的實時追蹤,儲能后端能夠實現電能的高效穩定存儲。
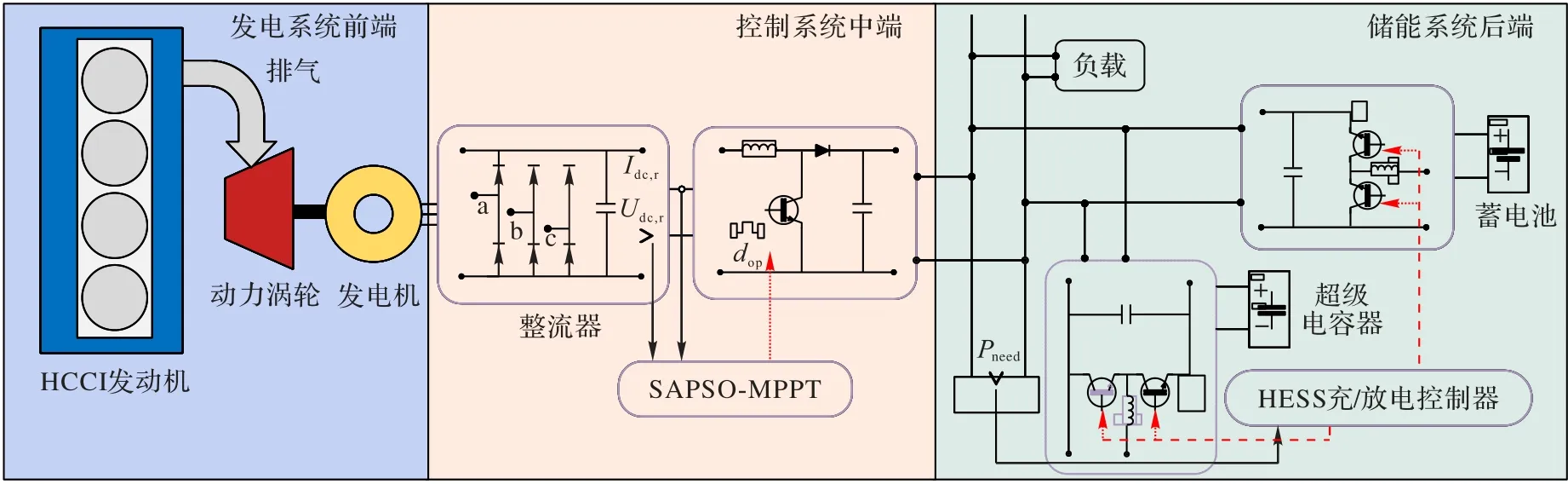
圖2 基于串聯復合渦輪發電的優化控制系統模型Fig.2 Optimized control system model based on tandem composite turbine power generation
2 自適應粒子群優化算法在串聯復合渦輪發電系統MPPT中的應用
2.1 自適應粒子群優化算法
粒子群優化(Particle Swarm Optimization,PSO)算法是一種模擬自然界鳥類覓食行為的智能尋優算法。由于模型結構簡單和高效穩定的特性,PSO 算法在各種優化問題中得到了廣泛應用[17]。在PSO 算法中,首先定義一個包含N個粒子的粒子群,每個粒子都是一個獨立的主體,具有粒子位置和粒子速度兩個關鍵參數。接著,根據特定的適應度函數計算每個粒子在種群中所處位置對應的適應度值。適應度反映了粒子位置的優劣,適應度函數則取決于需要解決的問題。最后,當單個粒子達到最優適應值時,根據位置pbest以及整個種群達到最優適應值時的位置gbest,對每個粒子的位置和速度進行迭代更新。更新公式如下所示:
其中:ω、c1、c2分別表示慣性權重、個體經驗系數、社會經驗系數;vi和xi表示第i個粒子的速度和位置;pbesti表示第i個粒子的最好位置,gbest表示整個種群的最好位置;j為維數,t為當前迭代次數,r1和r2為[0,1]的兩個隨機數。
傳統粒子群優化算法中的各種控制參數通常取常數值,這可能導致全局搜索能力與收斂速度難以兼顧的問題[18]。為了克服傳統PSO 算法的這一缺陷,本文采用一種自適應粒子群優化(SAPSO)算法,以提高算法的整體尋優性能。該算法在傳統PSO 算法的基礎上,通過對控制參數進行自適應調整,實現全局搜索能力和局部搜索能力之間的平衡。
SAPSO 算法中對于慣性權重、經驗系數等控制參數的自適應更新公式如下:
其中:ωmax和ωmin分別為慣性權重的最大值和最小值;c1s和c1f是個體經驗系數的初始值和最終值;c2s和c2f是社會經驗系數的初始值和最終值;tmax表示最大迭代次數;
由式(18)~(21)可以看出,在粒子群尋優前期,ω、c1取值較大,c2取值較小,此時粒子的運動主要取決于粒子自身慣性和個體最佳位置pbesti,粒子的全局搜索能力增強。在尋優后段參數取值恰好相反,ω、c1取值較小,c2取值較大,此時粒子的運動更大程度上受到群體最優位置gbest的影響,進而實現了對本算法的局部尋優性能以及向全局最優位置的收斂速度進行了提升。
為了檢驗本文所提出的SAPSO 算法的優越性,采用式(20)作為適應度函數測試不同粒子群優化算法的追蹤性能,該函數存在最優適應度值ymin=0,三種粒子群優化算法追蹤表現如圖3 所示。

圖3 SAPSO算法和傳統PSO算法尋優性能對比Fig.3 Optimization performance comparison of SAPSO and traditional PSO algorithms
分析圖3 可知,雖然在隨機初始化后SAPSO 算法的粒子群初始位置最差,但其收斂速度明顯快于其他兩種算法,在迭代第9 次的時候就追蹤到全局最優位置。
然而,動態PSO 算法和標準粒子群算法分別在迭代過程的第12 次和第18 次才達到最優適應度值。因此,可以看出SAPSO 算法相較于傳統PSO 算法具備更優越的追蹤性能,更適用于運行工況復雜多變的串聯復合渦輪發電系統。
2.2 SAPSO-MPPT在串聯復合渦輪發電系統中的應用
應用基于SAPSO 的MPPT 優化算法到發動機串聯復合渦輪控制系統中端,實現優化控制。其中,粒子位置表示MPPT 輸出控制信號PWM 波的占空比D。此時,粒子的解空間為一維空間,且粒子全局搜索范圍為[0,1]。選取發電系統輸出功率P為粒子位置對應的適應度。種群粒子的適應度函數的表達式為P=U*I,其中U和I分別表示電壓和電流。
SAPSO-MPPT 算法的具體步驟如下:
步驟1 隨機初始化粒子的族群,同時對族群的初始控制參數進行設計。
步驟2 計算每個粒子的適應度值。
步驟3 更新個體極值和全局最優位置。
步驟4 根據式(16)~(18)計算當前迭代次數下的慣性權重和經驗系數。
步驟5 按照式(14)~(15)實時更新族群中所有粒子速度及位置。
步驟6 檢驗是否達到結束條件,若達到,輸出最終的粒子群尋優結果;否則返回執行步驟2。
基于上文所述可得到基于自適應粒子群算法在發動機串聯復合渦輪發電系統MPPT 中的控制流程,如圖4 所示。
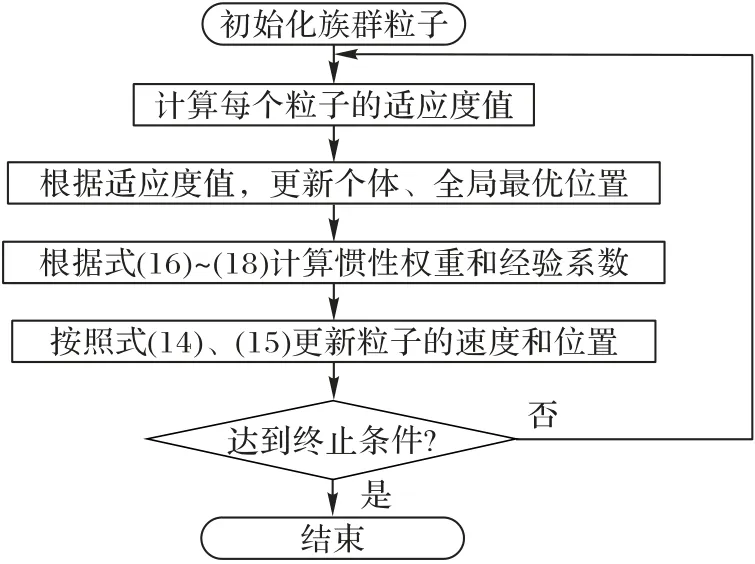
圖4 SAPSO-MPPT算法的流程Fig.4 Flow of SAPSO-MPPT algorithm
3 基于功率分配控制原理HESS優化應用
高能量密度的鉛酸蓄電池屬于常見的電能存儲裝置。然而,這種基于化學反應實現能量存儲的元件存在低功率密度、充放電速率緩慢以及壽命短等不足之處[19]。發動機串聯復合渦輪發電系統具有高波動性和隨機性的發電特性,需要具備高功率密度和動態響應速度的儲能元件,因此,單一電池儲能顯然無法滿足這些要求。作為一種功率存儲裝置,超級電容器(Super Capacitor,SC)具有高功率密度的優點,能在短時間內吸收/釋放大功率,從而彌補單一電池儲存特性的不足。將SC 與電池結合形成混合能源存儲系統(HESS)可提高能源存儲單元的穩定性和靈活性,并實現高效穩定的電能儲存[20],因此,本文選擇HESS 為串聯復合渦輪發電系統的儲能單元。
3.1 混合儲能系統結構
如圖5 所示,混合儲能系統由鉛酸蓄電池、SC、雙向直流變換器和HESS 充/放電控制器組成。復合渦輪發電系統發出的三相交流電經過AC/DC、DC/DC 的整流穩壓處理后輸進直流母線。蓄電池、SC 分別通過一個雙向DC/DC 接入直流母線,以實現車內用電負載與HESS 儲能元件之間的雙向功率流動。當負載用電功率超過當前發電端發電功率時,HESS 充/放電控制器控制儲能元件放電以滿足超出的需求功率;反之,HESS 吸收母線中多余的發電功率進而實現直流母線上的功率平衡。
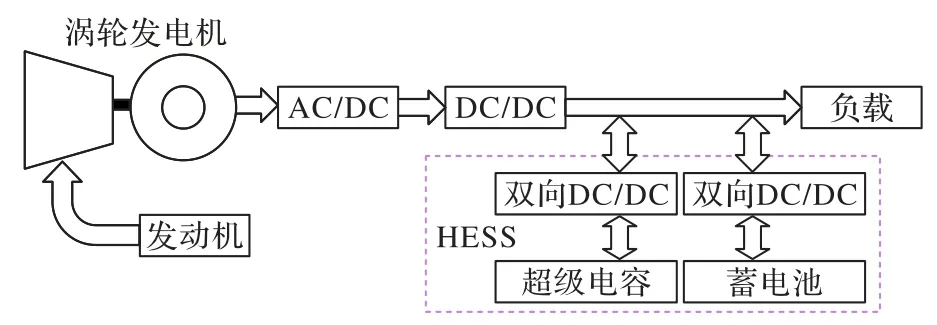
圖5 串聯復合渦輪發電系統混合儲能系統結構Fig.5 Hybrid energy storage system structure for tandem composite turbine power generation system
3.2 HESS功率分配控制策略
串聯復合渦輪發電系統混合儲能系統功率分配控制策略如圖6 所示。混合儲能系統控制單元模塊首先根據發電功率Pmax與負載消耗功率Pload計算出HESS 需求功率Pneed:
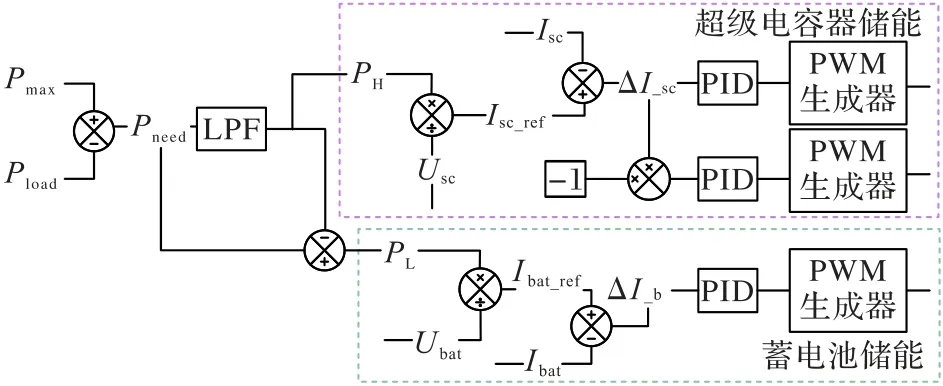
圖6 復合渦輪發電系統HESS功率分配控制策略Fig.6 Power distribution control strategy for HESS with tandem composite turbine power generation system
HESS 充放電控制器根據Pneed的正負取值決定HESS 的充放電狀態。若Pneed<0,HESS 向直流母線上輸出電能;若Pneed>0,則HESS 從直流母線上吸收電能;若Pneed=0,母線上功率平衡,HESS 無需參與工作。低通濾波器的功能是將Pneed分為兩部分,分別是高頻功率部分PH和低頻功率部分PL,同時可以控制蓄電池,從而實現蓄電池吸收低頻功率,超級電容吸收高頻功率的目的。
由于蓄電池和SC 充放電特性不同,采用不同結構的雙向DC/DC 對二者進行充放電控制。由于蓄電池始終需要保持恒流或恒壓釋放或吸收功率,蓄電池中的雙向DC/DC 控制單元使用Boost 升壓轉換器。對于超級電容而言,則是Buck/Boost 轉換器。
根據高,低頻需求功率與SC,蓄電池兩端電壓(Ubat,Usc)計算得到蓄電池需求電流Ibat_ref、Isc_ref并將它們作為各自部分的參考電流。
在蓄電池儲能部分,PID(Proportion Integration Differentiation)控制器根據蓄電池需求電流Ibat_ref與其實際電流Ibat的差值ΔI_b作為輸入,輸出合適占空比的PWM 波信號控制Boost 轉換器中的MOS 管。在超級電容器儲能部分,通過向PID 控制器中輸入兩個相反信號ΔI_sc,-ΔI_sc,調節輸出合適占空比的PWM 波控制信號同時控制Buck/Boost 轉換器中兩個開關管的開閉,使得超級電容器環路實際電流Isc達到超級電容器需求電流Isc_ref。
通過這種基于功率分配的控制方法可以使混合儲能系統實時追蹤需求功率,減小儲能損失和抑制負載功率波動;此外,該方法還具有降低蓄電池的電流壓力、延長HESS 壽命的優勢。
3.3 發動機復合渦輪發電系統儲能優化控制策略流程
針對發動機串聯復合渦輪發電系統提出了一種基于SAPSO 算法的儲能優化策略,具體的操作流程如圖7 所示。該優化控制策略分為3 個部分:發電系統前端、控制系統中端與儲能系統后端。
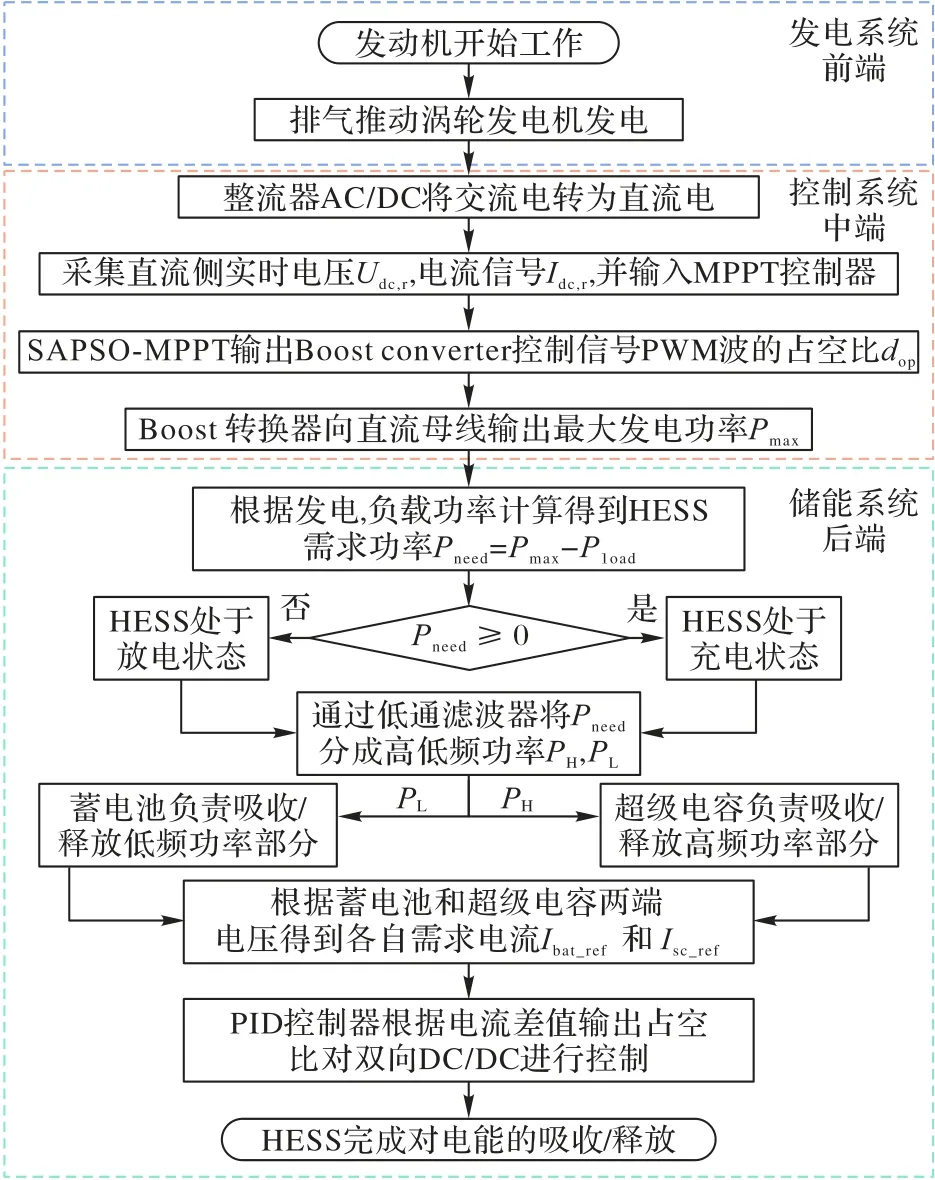
圖7 儲能優化控制策略總控制流程Fig.7 General control flow of energy storage optimized control strategy
首先,在發電系統前端,當發動機開始工作時,產生的高溫高壓排氣會推動渦輪發電機發電,將非線性、低質量的電能傳輸至控制系統中端的輸入口。接著,在控制系統中端,三相二極管橋式整流器將輸入端的交流電轉為直流電,并實時采集直流側電流電壓。本文的SAPSO-MPPT 控制器以此為輸入信號,輸出對應最優占空比dop的PWM 波控制信號控制Boost converter 的輸出,使它穩定跟蹤由串聯復合渦輪發電系統輸出的非線性電能的最大功率。
在獲得最大功率Pmax后,作為儲能系統后端的輸入。儲能系統后端根據發電端和負載端的功率差值得到HESS 實際需求功率Pneed,再通過低通濾波器實現控制蓄電池吸收低頻功率、超級電容吸收高頻功率的目的。充放電控制器根據各部分參考電流與實際電流的差值對雙向DC/DC 進行控制,使蓄電池和SC 完成對相應需求功率的吸收/釋放。
4 仿真結果
為了驗證本文所提出的基于改進粒子群算法的儲能優化控制策略在發動機串聯復合渦輪發電系統應用中的可行性與有效性,依據圖2 原理,對該優化方法進行了仿真實驗。
4.1 控制系統中端SAPSO-MPPT仿真結果與分析
為了檢驗本文所提出SAPSO-MPPT 控制系統中端對串聯復合渦輪發電系統前端輸出功率的追蹤性能,設置發動機運行工況如圖8 所示,本次仿真時間設為0~3 s。在0~1 s 發動機轉速保持恒定為1 600 r/min,在1 s 處開始加速,持續時間為0.5 s,轉速從1 600 r/min 提高至1 800 r/min,在1.5~3 s內轉速維持在1 800 r/min。
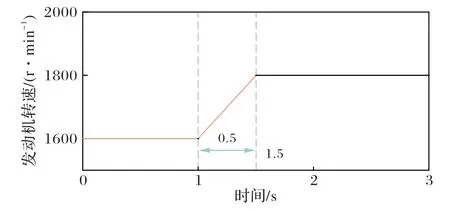
圖8 控制系統中端測試運行工況Fig.8 Operation conditions of control system mid-range test
控制系統中端對輸出功率變化的追蹤效果如圖9 所示。從圖9中可以觀察到,SAPSO-MPPT控制方法在大約1.62 s時實現了對該轉速下最大發電功率的穩定輸出,功率值約為2.70 kW。相比之下,傳統PSO控制方法則在1.77 s左右才追蹤到最大輸出功率,其功率值為2.51 kW。在達到最大輸出功率穩定值后,兩種控制方法均表現出了較小的功率波動。
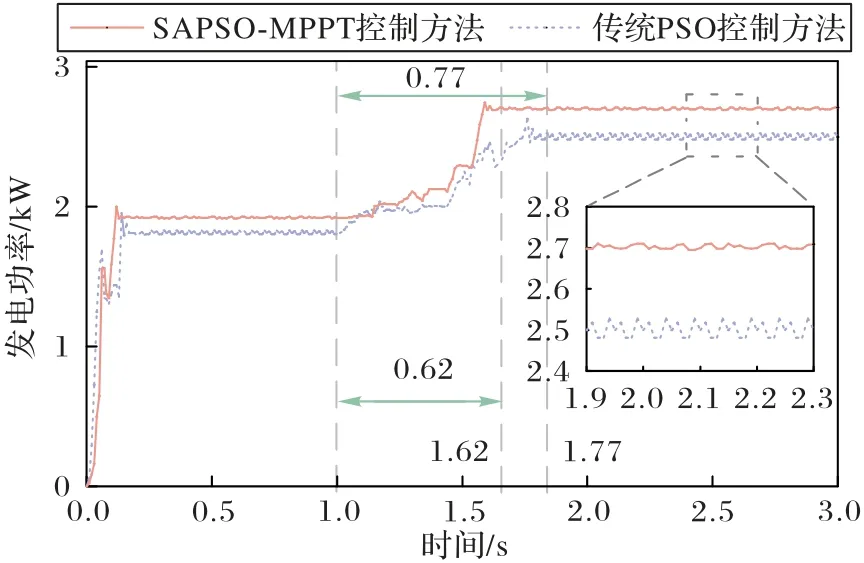
圖9 最大輸出功率追蹤效果對比Fig.9 Tracking effect comparison of maximum output power
在傳統PSO 控制方法下,輸出功率波動幅值約為47 W,波動率為1.73%;然而本文所提出的SAPSO 控制方法波動幅值僅為19 W 左右,波動率為0.71%。由此可見,相較于傳統PSO 控制方法,SAPSO-MPPT 控制方法能更好地捕獲串聯復合渦輪發電系統前端的輸出功率,有效提高最大輸出功率0.19 kW。此外,針對發動機運行工況突變引起的功率變化,SAPSO-MPPT 控制方法具有更好的動態追蹤特性,響應時間縮短0.15 s,且能夠有效降低最大功率點附近的功率振蕩。
4.2 儲能系統后端HESS仿真結果與分析
為檢驗本文所提出的HESS 的有效性,在設定工況下對它進行仿真驗證。假定發動機工作在穩態工況下,發電功率保持恒定,Pmax=3 kW。但車內用電負載功率不斷變化,Pload在仿真時間0~10 s 中分別取值[1.00,1.50,1.75,2.00,2.00,2.00,2.50,3.00,3.00,3.00]。根據式(21)計算得到HESS 需求功率,其具體曲線值如圖10 所示。
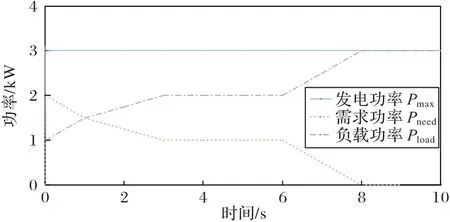
圖10 HESS測試工況功率曲線Fig.10 HESS test condition power curves
圖11為HESS整體儲能效果。從圖11中可見,HESS在對需求功率的追蹤過程中誤差值較低,具有較好的追蹤效果。在2.4~3.6 s,需求功率發生變化,HESS 實際功率雖有少許波動,但整體能夠完成對于需求功率的追蹤,并且二者差值僅在47.2 W左右,HESS電能回收效率可以達到95.3%。
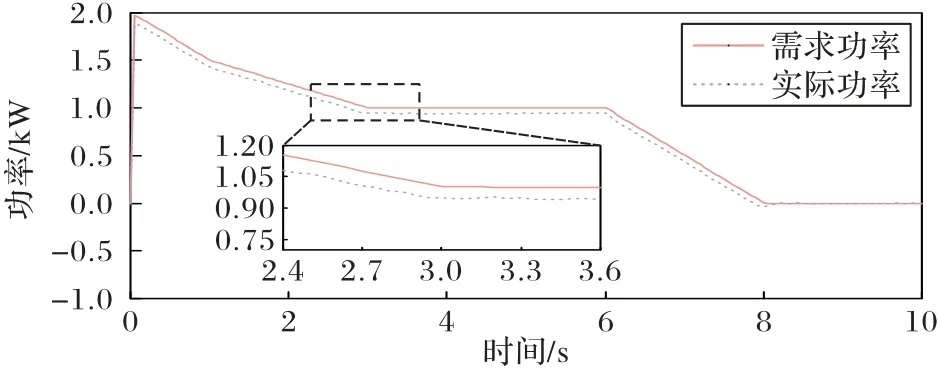
圖11 HESS儲能功率追蹤效果Fig.11 Tracking effect of HESS energy storage power
圖12 為HESS 中超級電容和蓄電池儲能曲線。在充電開始階段,車內用電系統突然減載,由于蓄電池功率密度低,功率響應速度慢,2 kW 的需求功率幾乎全部由超級電容器吸收。在1,3 s 處的功率變化也均由超級電容器進行響應,而未影響蓄電池部分的儲能過程。在充電結束階段(6~10 s),車內用電系統的突然加載,由于此時蓄電池仍處于較大功率的充電狀態,故通過超級電容器放電以減緩蓄電池的充電功率的降低。因此,對于給定的需求功率,超級電容器主要負責響應需求功率的快速變化并吸收高頻功率,而電池僅負責吸收低頻功率,超級電容器為電池的充放電過程提供了較好的緩沖。因此,本文提出的混合儲能系統可以顯著降低電池的高功率充放電頻率,從而提高電池壽命。
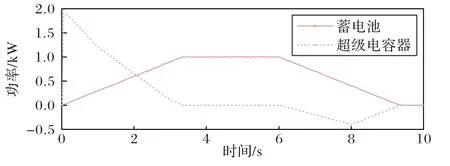
圖12 HESS中蓄電池、超級電容器儲能曲線Fig.12 Energy storage curves of battery and supercapacitor in HESS
綜上所述,本文所提出的基于自適應粒子群優化算法MPPT(SAPSO-MPPT)控制方法可以有效捕獲發動機串聯復合渦輪發電系統的最大輸出功率并且所提出的HESS 可以顯著改善蓄電池的充放電過程,提升蓄電池使用周期,使得整個HESS 儲能模塊具有更好的經濟性。
5 實驗結果
本文基于汽油HCCI 發動機實驗臺架搭建了串聯復合渦輪發電系統實驗平臺,如圖13 所示。臺架中各部分參數見表1。實驗平臺主要包括:汽油HCCI 發動機、廢氣渦輪增壓器、動力渦輪、發電機、整流器、MPPT 控制器、鉛酸蓄電池、超級電容器以及HESS 充/放電控制器。
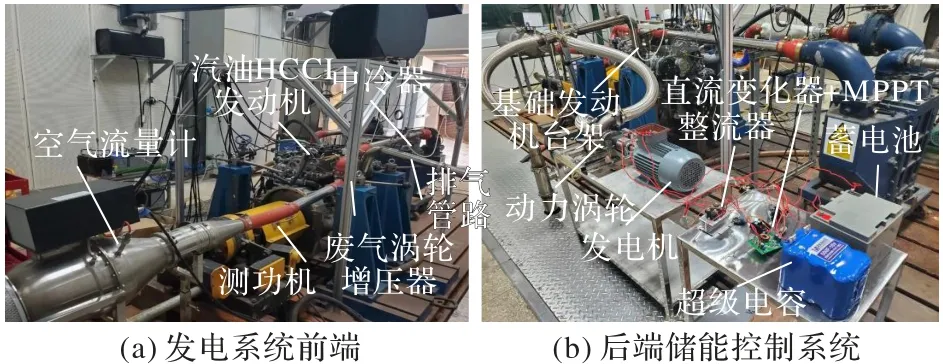
圖13 串聯復合渦輪發電系統實驗臺架Fig.13 Test bench for tandem composite turbine power generation system
首先在搭建完成的實驗平臺上研究本文所提出的SAPSO-MPPT 控制方法對復合渦輪發電系統發電功率的影響。設置發動機轉速從1 600 r/min 提升至1 800 r/min,對比分析在發動機轉速變化過程中SAPSO 控制方法與傳統PSO控制方法的發電情況并重復10 次實驗以確保實驗結果的準確性。所得實驗結果如圖14 所示。由于在實驗中發動機轉速的提高依賴于測功機,因此加速時間相對較長。

圖14 SAPSO控制方法與傳統PSO控制方法發電情況對比Fig.14 Comparison of SAPSO and conventional control methods for power generation
從結果可以明顯看出,相較于傳統控制方法,SAPSO 控制方法響應時間更短,能夠更快地追蹤到系統最大發電功率。此外,SAPSO 控制方法在相同發動機運行工況下能夠捕獲到更大的發電功率,相較于傳統控制方法可以有效提升發電功率大約150 W。同時,SAPSO 控制方法在10 次重復實驗中波動更小,追蹤表現更加穩定。由此可見,本文所提出的SAPSO 控制方法在響應速度、最大功率追蹤精度和穩定性方面均優于傳統控制方法。
其次,基于所建立的實驗平臺探究了串聯復合渦輪發電系統及所提出的儲能優化控制策略對發動機系統輸出功率以及整體熱效率的影響。實驗共設置3 組系統配置,分別為未改裝的基礎發動機(簡稱A 組),發動機+復合渦輪發電系統(傳統控制方法)(簡稱B 組),發動機+復合渦輪發電系統(基于改進粒子群算法的儲能優化控制方法)(簡稱C 組)并對比不同系統配置下的發動機輸出功率Pe,發電功率P(g發電功率為儲能單元最后吸收的功率值),系統總輸出功率Pw(Pw=Pe+Pg),以及發動機有效熱效率。具體實驗工況參數設置如表2 所示。
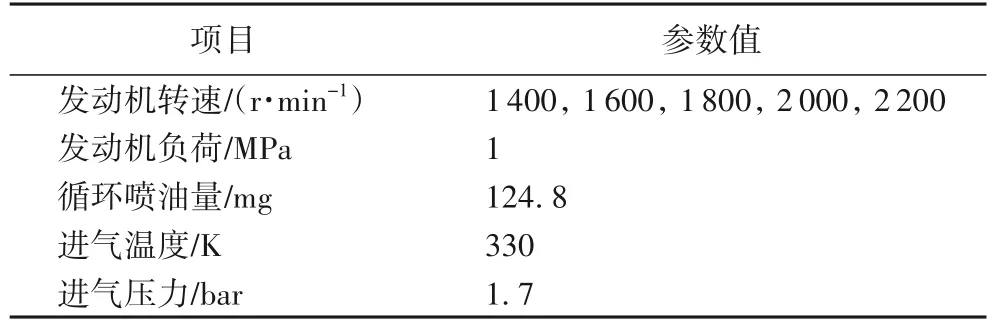
表2 實驗工況參數設置Tab.2 Test condition parameter setting
發動機串聯復合渦輪發電系統實驗結果如圖15、16 所示。圖15 為發動機系統輸出功率對比。可以看到,本文所提出的基于自適應粒子群算法的儲能優化策略相較于傳統控制方法可以有效提高系統發電效率,并且發動機運行轉速越高,SAPSO 控制方法對發電功率的提升越大。圖16 為發動機系統熱效率對比。
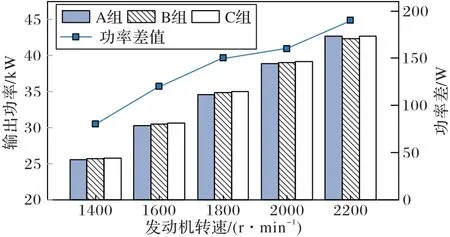
圖15 發動機系統功率輸出對比Fig.15 Engine system power output comparison
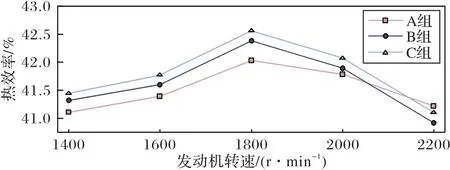
圖16 發動機系統熱效率對比Fig.16 Engine system thermal efficiency comparison
對比分析圖15、16 可以看到,相較于傳統PSO 控制方法,所提出的基于自適應粒子群優化算法的儲能優化策略在所有設置轉速下均能更好地提升發動機系統功率和熱效率。此外,可以看到當發動機運行在1 400~2 000 r/min 的轉速區間時,串聯復合渦輪發電系統的加入能有效提高發動機輸出功率和熱效率。隨著發動機轉速的提高,發動機排氣背壓會不斷增大。因此,當發動轉速進一步提高到2 200 r/min 時,復合渦輪發電裝置的加入反而會降低發動機系統的輸出功率和熱效率。當發動機轉速過高時,由排氣背壓過高引起的泵氣損失功率過大,導致發動機自身有效輸出功率大幅降低。通過對比不同轉速下發動機系統輸出功率和熱效率的變化情況可以看出,存在最優轉速點1 800 r/min 使得復合渦輪發電系統對整體發動機輸出功率和熱效率提升最大。在該轉速下采用本文所提出的基于改進粒子群優化算法的儲能優化控制策略能夠提高發動機系統有效輸出功率430 W,提升整體熱效率0.53 個百分點。
6 結語
針對串聯復合渦輪發電系統功率隨機性強、回收利用難度大等挑戰,本文提出了一種基于改進粒子群優化算法的儲能優化策略。通過引入混合儲能系統實現電能的高效回收,從而提高發動機系統的燃油經濟性。本文的主要結論如下:
1)所提出的SAPSO-MPPT 控制方法能有效應對發動機運行工況變化所導致的功率波動,迅速且穩定地追蹤系統的最大功率點。此外,SAPSO-MPPT 控制方法還能有效降低最大功率輸出點附近的功率振蕩,有利于后端儲能系統的吸收與存儲。
2)引入混合儲能系統用于改善單一蓄電池儲能系統功率密度低、動態響應速度慢的劣勢,實現高效穩定的電能存儲,進而提高復合渦輪發電系統儲能模塊的經濟性。
3)仿真與實驗結果表明:與傳統控制方法相比,采用SAPSO-MPPT 結合HESS 的儲能優化策略能夠有效提高發電功率。在所設計策略的指導下,發動機串聯復合渦輪發電系統最高可使發動機整體熱效率提高0.53%,展現出優良的控制特性與節能潛力。
在后續研究工作中,將繼續關注所提出的儲能優化控制策略在實際道路工況下的應用效果。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車與新動力(2015年1期)2015-02-27 12:11:01