基于模擬退火和樽海鞘群優(yōu)化的DV-Hop定位算法*
2024-03-23 07:30:58張大龍張立志郭仕勇韓剛濤
傳感器與微系統(tǒng) 2024年3期
關(guān)鍵詞:優(yōu)化
張大龍,孫 頂,張立志,郭仕勇,韓剛濤
(鄭州大學(xué)網(wǎng)絡(luò)空間安全學(xué)院,河南 鄭州 450002)
0 引 言
無線傳感器網(wǎng)絡(luò)(WSNs)是由大量的傳感器節(jié)點(diǎn)以自組織和多跳的方式構(gòu)成,具有數(shù)據(jù)采集、處理和傳輸?shù)墓δ堋F渲校?jié)點(diǎn)定位技術(shù)[1]是WSNs 中最基礎(chǔ)也是最重要的技術(shù)之一。節(jié)點(diǎn)定位技術(shù)包括基于測(cè)距的定位技術(shù)和基于非測(cè)距的定位技術(shù)。后者對(duì)傳感器的硬件復(fù)雜度和算力要求不高,被大多數(shù)傳感器網(wǎng)絡(luò)所采用。DV-Hop算法是基于非測(cè)距定位算法中應(yīng)用最廣泛的一種,如何提高該算法的定位精度成為了近年來WSNs 領(lǐng)域中的熱門研究方向。文獻(xiàn)[2]利用節(jié)點(diǎn)間的接收信號(hào)強(qiáng)度指示(received signal strength indication,RSSI)值量化節(jié)點(diǎn)間的跳數(shù),從而減小跳數(shù)誤差;文獻(xiàn)[3]則采用掃描全局信標(biāo)節(jié)點(diǎn)的信息的方法對(duì)跳距進(jìn)行修正,減小跳距帶來的誤差。考慮到DV-Hop算法未知節(jié)點(diǎn)估計(jì)過程可視為在全局范圍內(nèi)尋找最優(yōu)解的過程,因此許多研究者選擇將群智能優(yōu)化算法與WSNs 相結(jié)合,如文獻(xiàn)[4]采用改進(jìn)的鯨魚優(yōu)化算法代替最小二乘法計(jì)算未知節(jié)點(diǎn)的坐標(biāo);文獻(xiàn)[5]提出將Levy飛行策略與灰狼優(yōu)化算法相結(jié)合,從而進(jìn)一步提高未知節(jié)點(diǎn)估計(jì)精度;文獻(xiàn)[6]將灰狼優(yōu)化算法的狼群狩獵思想和綿羊優(yōu)化算法的羊群互動(dòng)思想相結(jié)合,改進(jìn)獅子群優(yōu)化算法并應(yīng)用于未知節(jié)點(diǎn)坐標(biāo)定位的優(yōu)化。
本文針對(duì)傳統(tǒng)DV-Hop 算法在計(jì)算跳數(shù)、跳距以及未知節(jié)點(diǎn)估計(jì)過程中存在的誤差,采用RSSI 值進(jìn)行跳數(shù)量化,引入修正因子對(duì)平均跳距進(jìn)行校正,在未知節(jié)點(diǎn)估計(jì)階段提出基于模擬退火和樽海鞘群[7]優(yōu)化的DV-Hop定位算法:通過改進(jìn)的Tent 混沌映射[8]優(yōu)化樽海鞘群初始位置,引入慣性權(quán)重策略改進(jìn)樽海鞘群的更新機(jī)制,再利用模擬退火算法[9]的概率突跳特性緩解群優(yōu)化算法容易陷入局部最優(yōu)的問題。仿真結(jié)果表明,本文提出的改進(jìn)算法能夠有效提高未知節(jié)點(diǎn)定位精度。
1 傳統(tǒng)DV-Hop算法原理
傳統(tǒng)DV-Hop算法可分為3 個(gè)階段:確定最小跳數(shù)、計(jì)算平均跳距以及未知節(jié)點(diǎn)估計(jì)。
第一階段:信標(biāo)節(jié)點(diǎn)將包含自身唯一標(biāo)識(shí)、位置信息和初始跳數(shù)為0的數(shù)據(jù)表以泛洪的方式廣播給通信范圍內(nèi)的其他節(jié)點(diǎn),每個(gè)節(jié)點(diǎn)僅保存與周圍其他節(jié)點(diǎn)間的最小跳數(shù)值。
第二階段:多次泛洪后,信標(biāo)節(jié)點(diǎn)獲取到與周圍其他信標(biāo)節(jié)點(diǎn)之間的最小跳數(shù)和位置信息,根據(jù)式(1)計(jì)算出各自的平均跳距Hopsizei
式中 (xi,yi),(xj,yj)為信標(biāo)節(jié)點(diǎn)i和其他信標(biāo)節(jié)點(diǎn)j的位置坐標(biāo);hij為信標(biāo)節(jié)點(diǎn)i和j之間的最小跳數(shù)。則未知節(jié)點(diǎn)與信標(biāo)節(jié)點(diǎn)間的估計(jì)距離du,i可表示為
式中hu,i為未知節(jié)點(diǎn)u與信標(biāo)節(jié)點(diǎn)i的最小跳數(shù)。
第三階段:利用第二階段中計(jì)算出的未知節(jié)點(diǎn)與各個(gè)信標(biāo)節(jié)點(diǎn)間的估計(jì)距離,采用最小二乘法進(jìn)行三邊定位。假設(shè)未知節(jié)點(diǎn)坐標(biāo)U=(x,y),根據(jù)式(2)得到各個(gè)信標(biāo)節(jié)點(diǎn)與未知節(jié)點(diǎn)的距離方程組如式(3)所示
利用最小二乘法得到的解為
其中
式(4)中的U即為未知節(jié)點(diǎn)的坐標(biāo)估計(jì)位置。
2 改進(jìn)的DV-Hop算法
2.1 基于RSSI的跳數(shù)量化
不少研究者對(duì)于傳統(tǒng)DV-Hop算法最小跳數(shù)的優(yōu)化提出了多種方法,文獻(xiàn)[10]中采用二通信半徑策略計(jì)算最小跳數(shù)值;文獻(xiàn)[11]中引入Ochiai系數(shù)來逼近相鄰節(jié)點(diǎn)間的通信重疊面積,來改進(jìn)現(xiàn)有的連續(xù)跳數(shù)模型。鑒于目前大部分傳感器節(jié)點(diǎn)集成了RSSI 測(cè)量設(shè)備,因此,本文根據(jù)RSSI的對(duì)數(shù)-常態(tài)分布模型所計(jì)算出的接受信號(hào)強(qiáng)度,對(duì)信標(biāo)節(jié)點(diǎn)通信范圍內(nèi)的未知節(jié)點(diǎn)跳數(shù)進(jìn)行量化,RSSI的對(duì)數(shù)-常態(tài)分布模型如式(7)所示
式中d0為參考信號(hào)傳輸距離,m;P(d0)為接收信號(hào)強(qiáng)度,dB;一般情況下,d0=1 m;n為射頻信道的衰減指數(shù),一般取2~4;dij為節(jié)點(diǎn)間的歐氏距離;Xσ為均值為0、方差為σ的高斯隨機(jī)分布,σ的取值根據(jù)節(jié)點(diǎn)間的通信環(huán)境而定。
選取信標(biāo)節(jié)點(diǎn)通信半徑R作為理想單跳距離且將該位置的信號(hào)強(qiáng)度值作為單跳距離的基準(zhǔn)信號(hào)強(qiáng)度RSSIR,則第i+1個(gè)節(jié)點(diǎn)接收到的第i個(gè)節(jié)點(diǎn)的信號(hào)強(qiáng)度值為RSSIi,i+1,根據(jù)此值,第i+1個(gè)節(jié)點(diǎn)的量化規(guī)則如式(8)所示
2.2 平均跳距校正
針對(duì)傳統(tǒng)DV-Hop 算法中計(jì)算平均跳距存在的誤差,文獻(xiàn)[3]根據(jù)全局信標(biāo)節(jié)點(diǎn)特性與未知節(jié)點(diǎn)局部信標(biāo)節(jié)點(diǎn)對(duì)定位精度的影響,提出HDCD算法;文獻(xiàn)[12]通過篩選參與平均跳距計(jì)算的信標(biāo)節(jié)點(diǎn)并對(duì)其進(jìn)行加權(quán)處理,從而減小引入的誤差。本文則通過引入修正因子[4]來對(duì)信標(biāo)節(jié)點(diǎn)的平均跳距進(jìn)行校正。假設(shè)2個(gè)信標(biāo)節(jié)點(diǎn)在泛洪過程中接收到了對(duì)方的位置信息,則兩信標(biāo)節(jié)點(diǎn)的實(shí)際距離d與估計(jì)距離^di,j,如式(9)、式(10)所示
根據(jù)兩兩信標(biāo)節(jié)點(diǎn)之間平均每一跳的實(shí)際距離d與估計(jì)距離^di,j的誤差,定義修正因子ei如式(11)所示
因此,校正后的平均跳距如式(12)所示
2.3 基于模擬退火和樽海鞘群優(yōu)化的未知節(jié)點(diǎn)估計(jì)
DV-Hop算法中未知節(jié)點(diǎn)估計(jì)問題可以看作在全局范圍內(nèi)搜索未知節(jié)點(diǎn)坐標(biāo)的最優(yōu)解問題。文獻(xiàn)[4]中利用改進(jìn)的鯨魚優(yōu)化算法代替最小二乘法,從而提高定位精度。文獻(xiàn)[13]引入數(shù)學(xué)優(yōu)化模型來限定人工蜂群算法的尋優(yōu)范圍,從而減少了定位階段的誤差和計(jì)算量。
同樣,受樽海鞘群聚行為的啟發(fā),2017 年,Mirjalili S等人提出了一種全新的群智能優(yōu)化算法--樽海鞘群算法,該算法可以用來解決未知節(jié)點(diǎn)估計(jì)過程中定位誤差較大,全局信息利用率低的問題,但同時(shí)也存在尋優(yōu)過程中容易陷入局部最優(yōu)的缺點(diǎn)[7]。針對(duì)這一問題,本文提出基于模擬退火的樽海鞘群優(yōu)化算法,利用模擬退火算法的概率突跳特性[14]在解空間中隨機(jī)搜索最優(yōu)解,即在樽海鞘群算法陷入局部最優(yōu)解時(shí)能夠概率性地跳出并且最終得到全局最優(yōu)。
2.3.1 構(gòu)建適應(yīng)度函數(shù)
本文根據(jù)參與定位的信標(biāo)節(jié)點(diǎn)與未知節(jié)點(diǎn)間平均每一跳的距離與估計(jì)距離之差作為構(gòu)建適應(yīng)度函數(shù)fitness(x,y)的準(zhǔn)則,如式(13)所示
其中,(x,y)為未知節(jié)點(diǎn)坐標(biāo),(xi,yi)為參與定位的信標(biāo)節(jié)點(diǎn)坐標(biāo),^dui為未知節(jié)點(diǎn)與信標(biāo)節(jié)點(diǎn)間的估計(jì)距離,N為參與定位的信標(biāo)節(jié)點(diǎn)個(gè)數(shù),hui為未知節(jié)點(diǎn)與信標(biāo)節(jié)點(diǎn)間的最小跳數(shù)。適應(yīng)度函數(shù)fitness(x,y)的值越小則說明未知節(jié)點(diǎn)(x,y)的坐標(biāo)越接近真實(shí)的未知節(jié)點(diǎn)坐標(biāo),適應(yīng)度越高。
2.3.2 改進(jìn)的Tent混沌映射種群初始化
由于在群優(yōu)化算法中,種群的初始化位置將會(huì)影響整個(gè)算法的收斂速度,初始化的種群在空間內(nèi)分布越均勻,越有利于算法的尋優(yōu)效率和定位精度。Tent映射產(chǎn)生的混沌序列分布均勻,但會(huì)產(chǎn)生小周期以及不穩(wěn)定周期點(diǎn)。因此,本文采用一種改進(jìn)的Tent 映射[8]產(chǎn)生的混沌序列作為種群的初始化位置,映射關(guān)系如式(14)所示
其中,rt為區(qū)間(0,1)上的隨機(jī)數(shù),NT為Tent混沌序列中的元素?cái)?shù)量。
根據(jù)式(14)產(chǎn)生混沌序列x后,樽海鞘群在搜索空間[lbj,ubj]內(nèi)的初始化位置如式(15)所示
2.3.3 樽海鞘群的位置更新
假設(shè)種群個(gè)數(shù)為N的樽海鞘群利用改進(jìn)的Tent 混沌映射初始化種群位置,計(jì)算每個(gè)個(gè)體的適應(yīng)度fitness(xi,yi),并將所有個(gè)體按照適應(yīng)度由高到低排序,選取其中適應(yīng)度函數(shù)值最小(適應(yīng)度最高)的個(gè)體mini∈[1,N]{fitness(xi,yi)},即全局最優(yōu)位置,作為食物源Fj。然后將適應(yīng)度前50%數(shù)量的樽海鞘規(guī)定為領(lǐng)導(dǎo)者,進(jìn)行全局探索;其余部分為追隨者,充分進(jìn)行局部探索。領(lǐng)導(dǎo)者位置根據(jù)式(16)進(jìn)行更新
式中ubj,lbj為搜索空間的上限與下限;c2,c3分別控制下次移動(dòng)的長度和下次移動(dòng)的方向,取值皆為[0,1]之間的隨機(jī)數(shù);c1的作用是平衡開發(fā)與勘探,定義如式(17)所示
式中l(wèi)為當(dāng)前迭代次數(shù),Lmax為最大迭代次數(shù)。
追隨者的位置則根據(jù)牛頓運(yùn)動(dòng)定律進(jìn)行更新,如式(18)所示
重復(fù)上述步驟,每次迭代都會(huì)重新選出適應(yīng)度最高的位置作為食物源,直到達(dá)到迭代次數(shù)上限,此時(shí)的食物源即為樽海鞘群優(yōu)化算法的全局的最優(yōu)解。
2.3.4 慣性權(quán)重策略
上述式(16)和式(18)為原始樽海鞘群算法中領(lǐng)導(dǎo)者與追隨者的位置更新策略。對(duì)于種群中的追隨者來說,其位置更新策略受領(lǐng)導(dǎo)者的位置影響;對(duì)于第i只追隨者來說,其位置更新受第i-1 只追隨者的影響。為了平衡樽海鞘群優(yōu)化算法的全局搜索能力和局部搜索能力,本文引入基于非線性遞減函數(shù)的慣性權(quán)重因子來衡量樽海鞘個(gè)體之間的影響,改進(jìn)后的追隨者更新策略如式(19)所示
式中wini為初始慣性權(quán)重,wend為最終慣性權(quán)重。隨著迭代次數(shù)l的增加,慣性權(quán)重因子w(t)隨之減小,即第i只追隨者的位置受第i-1 只追隨者的影響隨著迭代次數(shù)的增加會(huì)逐漸減小,局部探索能力增強(qiáng),從而使得樽海鞘群優(yōu)化算法的全局搜索能力和局部搜索能力得到平衡。
2.3.5 模擬退火流程
首先對(duì)模擬退火算法進(jìn)行初始化,初始溫度T為充分大。假設(shè)退火過程中能量從S1變化到S2,則能量變化量ΔC=S2-S1。其中,S2表示樽海鞘更新狀態(tài)后的適應(yīng)度值,S1表示樽海鞘更新狀態(tài)前的適應(yīng)度值。根據(jù)Metropolis 算法[15]準(zhǔn)則,如式(20)所示,p表示當(dāng)前狀態(tài)接受更新后的樽海鞘位置的概率
對(duì)于ΔC<0的樽海鞘,更新后的適應(yīng)度高于更新前的適應(yīng)度,即表示更新后的位置要優(yōu)于更新前的位置,則這種更新將會(huì)被接受;對(duì)于ΔC≥0 的樽海鞘,更新后的適應(yīng)度不如更新前的適應(yīng)度,即表示更新后的位置相比于原位置更加偏離實(shí)際位置,這種情況下,改進(jìn)算法不會(huì)立刻舍棄該更新位置,而是會(huì)在(0,1)區(qū)間內(nèi)生成一個(gè)均勻分布的隨機(jī)數(shù)ε,如果ε<p,則此時(shí)的位置更新被接受,否則拒絕更新,樽海鞘保持更新前的位置
最后根據(jù)式(21)進(jìn)行退火操作,其中,λ為溫度下降速率,一般取值為0.8~0.99。重復(fù)上述位置更新策略以及模擬退火流程,當(dāng)最終溫度達(dá)到終止溫度水平,即算法到達(dá)設(shè)定的最大迭代次數(shù);或者適應(yīng)度函數(shù)值到達(dá)所設(shè)定的適應(yīng)度門限要求時(shí),停止迭代,將此時(shí)的食物源Fj,即全局最優(yōu)位置輸出作為未知節(jié)點(diǎn)的最終估計(jì)坐標(biāo)。
2.4 改進(jìn)的DV-Hop算法流程
1)根據(jù)RSSI值量化后的跳數(shù)與修正因子校正后的平均跳距計(jì)算出未知節(jié)點(diǎn)與周圍信標(biāo)節(jié)點(diǎn)的估計(jì)距離,并且利用式(13)構(gòu)建適應(yīng)度函數(shù)。
2)在搜索空間內(nèi)通過改進(jìn)的Tent 混沌映射得到分布均勻的初始化樽海鞘群,并初始化模擬退火算法。
3)計(jì)算種群中所有個(gè)體的適應(yīng)度函數(shù)值,確定食物源并劃分種群領(lǐng)導(dǎo)者與追隨者。
4)分別利用式(16)和式(19)計(jì)算更新后領(lǐng)導(dǎo)者與追隨者位置。
5)計(jì)算更新后的種群個(gè)體適應(yīng)度,通過模擬退火流程中的式(20)判斷是否接受更新后的樽海鞘個(gè)體位置。
6)根據(jù)式(21)進(jìn)行退火操作。
7)重復(fù)上述步驟(3)~步驟(6),直到達(dá)到最大迭代次數(shù)或者滿足適應(yīng)度門限要求,輸出此時(shí)食物源作為未知節(jié)點(diǎn)估計(jì)坐標(biāo)。
3 算法仿真與結(jié)果分析
采用仿真軟件MATLAB 2017a 作為仿真平臺(tái)進(jìn)行實(shí)驗(yàn),將本文改進(jìn)算法與傳統(tǒng)DV-Hop、文獻(xiàn)[16]中提出的算法,記為SADV-Hop算法和文獻(xiàn)[17]的IGWODV-Hop 算法進(jìn)行對(duì)比仿真。如圖1 所示,仿真環(huán)境為100 m ×100 m 的矩形區(qū)域中隨機(jī)布設(shè)一定比例的信標(biāo)節(jié)點(diǎn)與未知節(jié)點(diǎn),網(wǎng)絡(luò)連通性如圖2所示,節(jié)點(diǎn)的分布和網(wǎng)絡(luò)連通性符合實(shí)際環(huán)境中的分布情況。對(duì)比算法中的適應(yīng)度函數(shù)均采用式(13)的形式,采用歸一化的相對(duì)定位誤差作為衡量算法定位精確度的標(biāo)準(zhǔn)
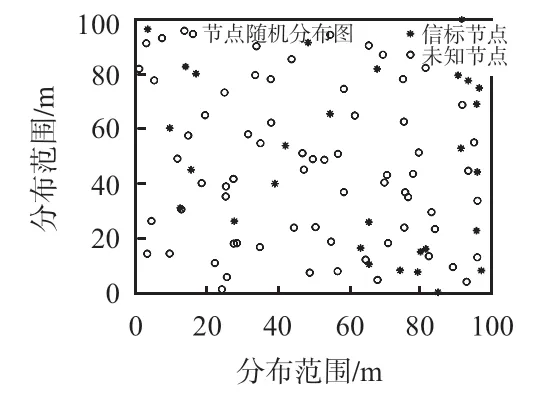
圖1 網(wǎng)絡(luò)連通性示意

圖2 節(jié)點(diǎn)連通性示意
其中,(xi,yi),(xreal,yreal)分別為未知節(jié)點(diǎn)估計(jì)坐標(biāo)與未知節(jié)點(diǎn)真實(shí)坐標(biāo)。N為未知節(jié)點(diǎn)數(shù)量,R為通信半徑。
3.1 信標(biāo)節(jié)點(diǎn)比例對(duì)定位精度的影響
設(shè)置通信半徑為30 m,節(jié)點(diǎn)總數(shù)為100 個(gè),信標(biāo)節(jié)點(diǎn)比例由10%逐漸增加到40%,進(jìn)行100 次隨機(jī)實(shí)驗(yàn),將得到的結(jié)果求均值。信標(biāo)節(jié)點(diǎn)比例與歸一化的相對(duì)定位誤差之間的關(guān)系如圖3(a)所示:隨著信標(biāo)節(jié)點(diǎn)的比例增加,4 種算法的定位誤差都隨之減小,原因是當(dāng)信標(biāo)節(jié)點(diǎn)比例較小時(shí),未知節(jié)點(diǎn)周圍的信標(biāo)節(jié)點(diǎn)信息匱乏,定位精度較低,隨著信標(biāo)節(jié)點(diǎn)比例的增加,定位精度逐漸增高,但是當(dāng)信標(biāo)節(jié)點(diǎn)比例過大時(shí),對(duì)定位精度的影響會(huì)逐漸變小。本文算法相比于傳統(tǒng)DV-Hop算法、SADV-Hop算法與IGWODV-Hop算法定位精度分別提升了36.7%,16.2%,9.1%。
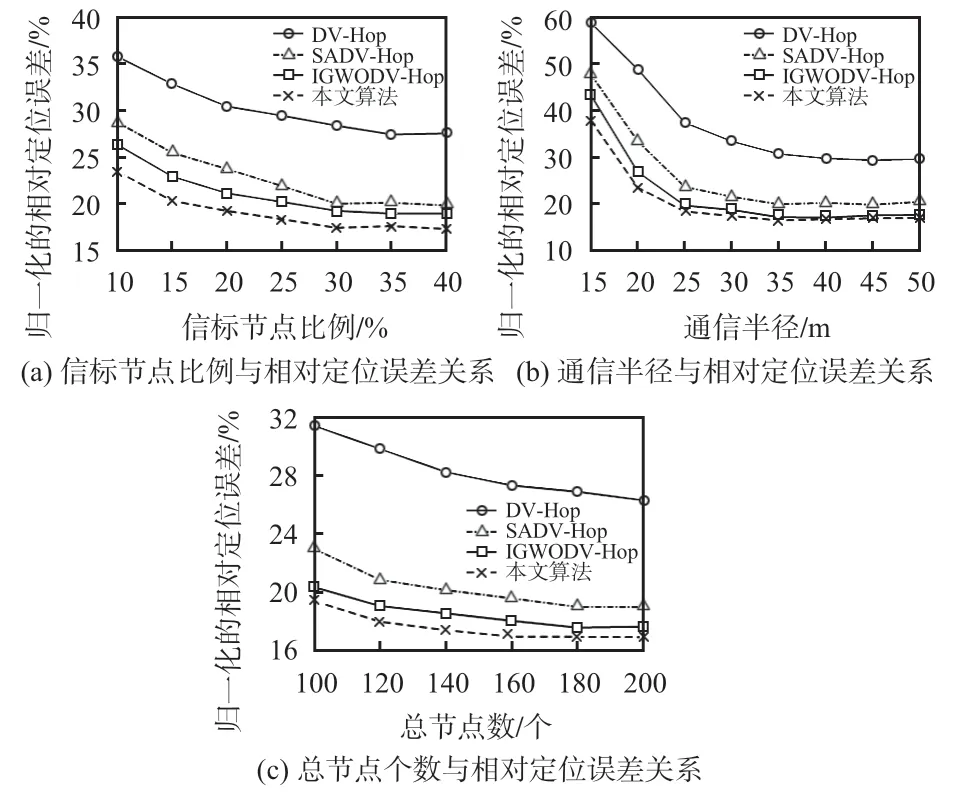
圖3 性能測(cè)試結(jié)果
3.2 通信半徑對(duì)定位精度的影響
設(shè)置節(jié)點(diǎn)總數(shù)為100個(gè),信標(biāo)節(jié)點(diǎn)比例為30%,通信半徑由15 m逐漸增加到50 m,進(jìn)行100次實(shí)驗(yàn),將得到的結(jié)果求均值。則通信半徑與定位精度的關(guān)系如圖3(b)所示:當(dāng)通信半徑在15~30 m變化的過程中,4種算法的定位精度快速提升,之后再擴(kuò)大通信半徑則歸一化相對(duì)定位誤差曲線變化平緩甚至有所回升,原因是:通信半徑的增加使得網(wǎng)絡(luò)連通性增強(qiáng),未知節(jié)點(diǎn)能夠利用的位置信息增多,但是在過大的通信半徑下,未知節(jié)點(diǎn)接收到的冗余信息也增多,不利于未知節(jié)點(diǎn)的定位。本文算法相比于傳統(tǒng)DV-Hop 算法、SADV-Hop算法與IGWODV-Hop算法定位誤差分別降低了43.6%,19.3%,7.5%。
3.3 總節(jié)點(diǎn)數(shù)量對(duì)定位精度的影響
設(shè)置通信半徑為30 m,信標(biāo)節(jié)點(diǎn)比例為30%,總節(jié)點(diǎn)數(shù)由100個(gè)逐漸增加至200 個(gè),進(jìn)行100 次隨機(jī)實(shí)驗(yàn),并將得到的定位結(jié)果求均值。則總節(jié)點(diǎn)個(gè)數(shù)與歸一化的相對(duì)定位誤差之間的關(guān)系如圖3(c)所示:在100 m×100 m的仿真環(huán)境下,增加總節(jié)點(diǎn)個(gè)數(shù),則信標(biāo)節(jié)點(diǎn)的密度和整個(gè)網(wǎng)絡(luò)的連通度都會(huì)提升。同樣,當(dāng)總節(jié)點(diǎn)個(gè)數(shù)過多時(shí),網(wǎng)絡(luò)中的冗余信息也會(huì)增加,因此當(dāng)總節(jié)點(diǎn)個(gè)數(shù)大到一定程度時(shí),總節(jié)點(diǎn)個(gè)數(shù)對(duì)定位精度的影響會(huì)非常微小。本文算法相比于傳統(tǒng)DV-Hop算法、SADV-Hop算法與IGWODV-Hop算法定位精度分別提升了38.0%,13.2%,5.1%。
4 結(jié)束語
針對(duì)傳統(tǒng)DV-Hop算法定位精度較低等問題,本文對(duì)定位算法3 個(gè)階段提出改進(jìn)算法:基于RSSI 值的跳數(shù)量化機(jī)制、基于修正因子的平均跳距校正以及基于模擬退火的改進(jìn)樽海鞘群優(yōu)化算法。在經(jīng)典樽海鞘群優(yōu)化算法中采用改進(jìn)的Tent 混沌映射對(duì)種群的初始位置進(jìn)行優(yōu)化,并且在樽海鞘位置更新過程中引入慣性權(quán)重策略平衡樽海鞘群優(yōu)化算法的局部搜索能力和全局搜索能力,最后將其更新策略與模擬退火算法相結(jié)合,緩解樽海鞘群優(yōu)化算法易陷入局部最優(yōu)的缺點(diǎn),該算法相比于其他的智能群優(yōu)化算法在定位精度上有著明顯提高,但是算法的復(fù)雜程度也略有提升,下一步的研究重點(diǎn)在于降低算法的復(fù)雜度。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
