基于TOF和自適應抗差卡爾曼濾波的UWB室內(nèi)定位算法
2024-03-23 07:31:00方賢寶蘇羿安鐘樂天
傳感器與微系統(tǒng) 2024年3期
方賢寶,林 勇,蘇羿安,鐘樂天
(合肥工業(yè)大學電氣與自動化學院,安徽 合肥 230009)
0 引 言
隨著移動通信、人工智能(AI)的蓬勃發(fā)展,定位技術早已走進人們的日常生活中,如室外定位技術中,全球定位系統(tǒng)(global positioning system,GPS)幾乎覆蓋人類的生產(chǎn)生活。與此同時,人們對室內(nèi)定位的需求也與日俱增,工廠的智能生產(chǎn)、醫(yī)院的高效救治、商場的貨品搜尋等都需要準確的位置定位信息[1]。因此,將位置服務拓展到室內(nèi)是一個急需解決的問題。超寬帶脈沖(impulse radio of ultrawideband,IR-UWB)技術具有高帶寬、高分辨率、高無線傳輸速率、超強魯棒性、低能耗等顯著優(yōu)點,現(xiàn)已成為未來最具開發(fā)前景的室內(nèi)無線定位解決方案之一[2]。常見的超寬帶(UWB)定位技術分為4 類:基于飛行時間(time of flight,TOF)的[3]、基于到達時間差(time difference of arrival,TDOA)的[4],基于到達角(angle of arrival,AOA)的[5]和基于接收信號強度(received signal strength,RSS)的[6]。但在復雜的室內(nèi)環(huán)境下,UWB 信號傳播極易受到影響,從而造成定位精度降低。文獻[7]使用Chan算法獲取初始定位,比較殘差與門限值鑒別與剔除非視距(non-line-of-sight,NLOS)誤差,再利用改進無跡卡爾曼濾波(unscented Kalman fitering,UKF)算法得到精確的位置坐標;文獻[8]提出對原始定位數(shù)據(jù)進行2 次粒子濾波,通過模型存儲與權重調節(jié),從而實現(xiàn)精準高效的動態(tài)目標定位;文獻[9]利用抗差因子鑒別NLOS 誤差,以削弱其對測距器造成的噪聲干擾及影響,同時利用Sage-Husa 濾波算法進行估計和校正,最終使用卡爾曼濾波(Kalman filtering,KF)算法實現(xiàn)高精度UWB定位與解算。
造成UWB室內(nèi)定位算法的誤差為標準時間誤差和多徑效應,即在NLOS 環(huán)境下將大大降低定位誤差。而上述文獻只關注于消除NLOS誤差,而忽略了標準時間誤差,所以為了抑制標準誤差和NLOS誤差,提高定位算法的精度,本文提出一種基于TOF 和自適應抗差KF(adaptive robust KF,ARKF)的UWB 室內(nèi)定位算法--IKF 算法。首先對UWB設備進行標定,實現(xiàn)對測距誤差信息的快速修正;針對標準誤差,使用改進的測距算法,優(yōu)化定位;其次采用自適應抗差濾波算法抑制NLOS誤差,提高定位精度。
1 UWB/TOF測距原理
1.1 UWB定位誤差模型
UWB室內(nèi)定位系統(tǒng)如圖1(a)所示,主要由3個主從基站,1個標簽以及路由器和服務器組成。室內(nèi)定位系統(tǒng)中,基站與標簽之間形成的信號直射傳輸路徑往往容易受到室內(nèi)裝飾物或人員等障礙物阻擋,對此產(chǎn)生的信號誤差一般可稱為NLOS誤差,信號的傳播可以稱為NLOS 傳播,路徑軌跡如圖1(b)所示。

圖1 UWB定位模型
假設在視距(line of sight,LOS)環(huán)境下,基站k與標簽在ti時刻測量距離值為rk(ti),具體可表示為
式中Lk(ti)為基站k與標簽在ti時刻的真實距離,nk(ti)為標準時間誤差,由標準時間偏差帶來的測量誤差,包括脈沖信號在基站與標簽之間的固定延時誤差、器件誤差,還與信號傳播距離、室內(nèi)溫度等有關[10]。該類誤差通常認為是均值誤差為0,標準差較小的高斯隨機噪聲,可使用測距標定法消除部分,同時本文使用改進的測距算法進一步剔除,增加定位精度。在NLOS環(huán)境下,存在隨機測量誤差,誤差模型表示為
式中 NLOSk(ti)為NLOS誤差,服從指數(shù)、均勻、高斯或者δ分布,且與系統(tǒng)定位環(huán)境有關,可通過濾波算法降低其誤差。
1.2 TOF測距原理
基于TOF 的測距原理為設備間互發(fā)信號,通過信號TOF與傳播速度測量兩者之間的距離。其方式主要有2種:單邊雙向測距(single-sided two-way ranging,SS-TWR)算法[11]與雙邊雙向測距(double-sided two-way ranging,DS-TWR)算法[12]。
SS-TWR算法原理如圖2(a)所示,先由設備A 向設備B發(fā)送測距請求,當設備B 接收該請求后,延遲一段時間Treply向設備A發(fā)送確認消息,經(jīng)過Tprop設備A 接收。從設備A發(fā)送信息至接收,整個過程時間記為Tround。每個設備都對信號傳輸和接收的時間進行精確記錄,最終計算出Tround和Treply,估算出最終的TOF,測量值與誤差表達式如下
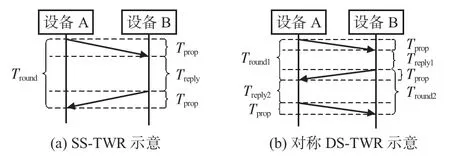
圖2 TOF測距原理
其中,eA與eB為設備A和設備B 的時鐘漂移,單位為10-6。該算法雖僅需一次信息交換即可得到測距信息從而降低功耗,但是TOF 估計誤差隨著Treply的增加而增加,令測距值存在較大誤差,故SS-TWR 算法在實際情形下并不適用。
DS-TWR算法原理如圖2(b)所示。設備A 發(fā)送UWB信號,經(jīng)過Tprop后,設備B 接收并延遲一段時間Treply1后發(fā)送確認消息幀,設備A在接收后延后時間Treply2再次發(fā)送測距信息。最終TOF與估計誤差如下
由式(5)可知,只有令設備的回復時間間隔一致,才可以降低由時鐘漂移引起的標準誤差。該算法雖降低了標準時間誤差,但設備延遲時間必須盡可能相等,若不等,則將增大測距誤差,進一步降低定位精度。
2 算法改進
2.1 基于對稱DS-TWR方法的優(yōu)化
由以上分析可知,SS-TWR算法僅需一次信息交換即可得TOF,但是誤差大,DS-TWR 算法簡單,僅需簡單數(shù)學運算即可得到測距結果,但要求設備高精度,否則將引起較大誤差。對此,本文提出一種基于DS-TWR 的改進算法,如圖3所示。
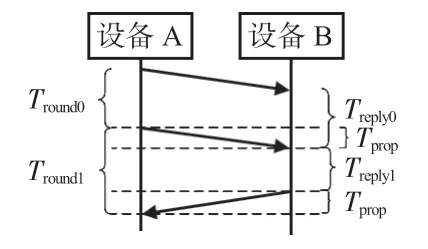
圖3 DS-TWR優(yōu)化算法示意
首先由設備A 發(fā)送測距請求信號,在等待時間Tround0后,再次發(fā)送測距請求,經(jīng)過延遲時間Treply1與信號Tprop后,設備A接收到確認消息幀,其中,Tround0與Treply1為預先設定好的時間間隔。設備B第一次與第二次接收消息的時間間隔設為Treply0,且令其等于Tround0。Tround0和Tround1通過設備計時器得到,通過簡單運算,有
真實值為
由以上公式可得該算法中測量值與真實值Tprop的誤差為
由上式可知,該算法中測距誤差僅與飛行實際時間Tprop和eB有關。由于SS-TWR算法誤差較大,并不適用,僅對比DS-TWR算法與本文改進算法。例如,對于DS-TWR算法,假設當設備A與設備B應答消息延遲時間相差1 ms、時鐘漂移之差為2 ×10-5,真實距離為300 m 時,計算出標準誤差為5 ns,對此產(chǎn)生的測距誤差為1.5 m;而本文測距算法中,信號傳播時間的實際值為1 000 ns,當設備B 的時鐘漂移eB最大為20 ×10-6,TOF誤差僅為0.04 ns,測距誤差為1.2 cm。相比DS-TWR 算法,該算法降低了標準時間誤差,提升了測距精度。
2.2 基于KF算法的優(yōu)化
KF是一種線性濾波器,可以根據(jù)上一時刻的系統(tǒng)狀態(tài)和預測狀態(tài),對系統(tǒng)下一時刻的真實狀態(tài)進行推測的最優(yōu)估計算法[13]。KF 本身是一種遞歸過程,由以下5 個遞歸方程組成
式中Ak-1與Bk-1分別為狀態(tài)轉移矩陣和輸入控制矩陣,Qk-1為過程噪聲協(xié)方差矩陣,Uk-1為系統(tǒng)控制量,Hk為觀測模型矩陣,Rk為過程噪聲協(xié)方差矩陣。Kk為卡爾曼增益,對最優(yōu)估計^Xk進行比例調節(jié),其大小反映了在最優(yōu)化狀態(tài)值估計過程中“更相信”觀測值Zk還是估計值。
KF算法能夠對數(shù)據(jù)進行線性濾波,結合觀測值與測量值,最終得到系統(tǒng)的最佳估計值。但在復雜的室內(nèi)環(huán)境下,室內(nèi)裝飾與人員等都會遮擋UWB 信號,形成多徑效應,帶來NLOS誤差,使得定位估計值出現(xiàn)偏差。因此,本文提出抗NLOS KF算法,通過比較殘差與3 倍信息的方差來判斷LOS與NLOS情形,若存在NLOS則對增益進行縮放以減小測距誤差。
測量的部分異常值是在k時刻的最優(yōu)估計時首次被引入,若能預先將計算所得的殘差進行修正,再繼續(xù)進行濾波最優(yōu)估計,則可以有效消除部分異常值,將殘差矩陣Δk和方差矩陣Dk定義為
依據(jù)3倍方差理論和上式,得到如下判斷公式
式中為Dk矩陣對角線上的第i個元素,為Δk的第i個元素,當上式不滿足時,則受到NLOS誤差,進行修正
式中α為修正系數(shù),決定了對NLOS誤差的抑制效果。在實際情形中,UWB使用場景受到的NLOS誤差不是唯一的,因此對α取固定值不符合實際。所以,為進一步提高抗NLOS誤差的效果,需要依據(jù)殘差與方差的對應關系來調節(jié)α的值
其中,b為調制指數(shù),控制著修正指數(shù)的放大與縮小。當處于移動情形下,定位精度會受到NLOS 誤差而發(fā)生變化,相對應的殘差也會改變,所以需要調節(jié)修正系數(shù)α在1 -b至1不斷變化,達到自適應抗NLOS 誤差的效果。在本文中,最終經(jīng)過實驗驗證,修正系數(shù)α設為0.8,最大縮小比例b設置為0.4可達到最佳實驗效果。
3 實驗與驗證結果
實驗布置如圖4所示。圖4中,標簽位于Pi處,基站分布四周,分別使用KF算法和本文算法進行濾波,最后使用三邊定位法進行定位,使用式(16)計算定位誤差,比較定位精度

圖4 實驗環(huán)境示意
其中,(x,y)為定位算法解算得到的標簽坐標,(xt,yt)為標簽實際坐標。
3.1 UWB測距標定
為進一步消除定位誤差,本文實驗依次對實驗設備進行測距標定[14]。實驗在逸夫樓4 樓一個空實驗室內(nèi)進行,大小為6.5 m×8 m,實驗環(huán)境中基站與標簽之間無遮擋物,無實驗人員穿行,為相對意義下的LOS環(huán)境。首先對基站A1 進行測距實驗標定:基站A1 不動,標簽由近及遠選擇10個待測點,通過測距儀器測得的距離作為真實值,標簽與基站A1測得的數(shù)據(jù)在使用3σ原則剔除較大誤差數(shù)據(jù)后取平均值作為量測值,對2種測量數(shù)據(jù)進行一次線性擬合,確定誤差模型,完成基站的標定,其余基站同理。表1 為UWB各基站的校正參數(shù)。其中,擬合優(yōu)度的數(shù)值越接近1,表明擬合程度越好。

表1 基站校正參數(shù)
3.2 UWB靜態(tài)定位實驗
表2列出了LOS環(huán)境下,2 種算法在靜態(tài)時定位誤差的數(shù)據(jù)對比。可以看出,在觀測環(huán)境較好的情形下,2 種算法的精度相當,但IKF 算法精度仍有較小的提高。因為本文使用了改進的TOF算法和測距標定,剔除了標準誤差,一定程度上提高了定位精度。

表2 靜態(tài)測試點LOS環(huán)境定位誤差比較
表3為在NLOS環(huán)境下的靜態(tài)定位實驗結果。可以看到:KF算法的最小誤差達到約30 cm,而IKF算法最大誤差僅為20 cm左右,平均定位誤差大幅度降低。整體上,本文提出的算法可以在NLOS環(huán)境下有效且準確地對系統(tǒng)進行靜態(tài)定位。

表3 靜態(tài)測試點NLOS環(huán)境定位誤差比較
3.3 UWB動態(tài)定位實驗
在本文實驗中,實驗人員攜帶標簽從P1 出發(fā),依次經(jīng)過P2,P3,P4,P5,直至點P6,整體呈現(xiàn)5 字型,進行LOS與NLOS環(huán)境下的動態(tài)定位實驗,人員以正常勻速移動。如圖5 所示,ARKF 算法與KF 算法在2 種環(huán)境下的定位軌跡。

圖5 2 種算法在LOS環(huán)境下的動態(tài)定位比較
從圖5中的2幅圖對比看出,在LOS環(huán)境下,2 種算法的動態(tài)定位結果相差不大,但KF算法仍有較少部分的斷點與軌跡偏移,而本文算法基本貼合原路徑。在NLOS 環(huán)境下,如圖6 所示,KF 與ARKF 算法皆有一定的誤差,但KF算法卻有部分斷點,偏離原路徑,最大誤差達到50 cm,而本文算法動態(tài)定位較連續(xù),無較大偏差,可以達到20 cm以內(nèi),最大誤差僅25 cm,定位效果較好,定位精度較高。
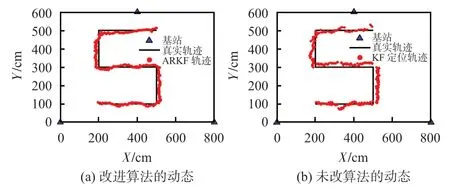
圖6 2 種算法在NLOS環(huán)境下的動態(tài)定位比較
4 結束語
在UWB測距過程中,易受包括器件誤差、延時誤差在內(nèi)的標準誤差以及NLOS 測距誤差等因素的影響,導致測距精度大幅度降低。針對前者,本文提出一種改進的TOF算法,并對設備進行測距標定,利用一次線性擬合剔除測距過程中的標準誤差;通過比較殘差與3 倍信息的方差判斷是否有NLOS存在,以此減小NLOS 誤差。實驗結果表明:本文提出的改進算法能夠有效剔除標準時間誤差與NLOS誤差,提高定位系統(tǒng)在復雜室內(nèi)環(huán)境下的定位精度。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
電子制作(2018年11期)2018-08-04 03:26:08
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
