傾斜攝影空中三角測量數據解算優化研究
2024-03-25 15:26:10馬喜飛
科技創新與應用 2024年8期
馬喜飛
摘? 要:針對傾斜攝影空中三角測量解算精度低、易分層、效率低的問題,該文對空中三角測量原理進行深入分析,并結合傾斜攝影數據的特點,提出幾種空中三角測量數據解算優化方案,并通過實際數據對該文提出的方案進行驗證。通過對實驗數據分析可知,該文提出的幾種方案可以有效提升傾斜數據空中三角測量解算的精度,并且解算成功率高、效率高,可以為傾斜攝影空中三角測量數據高質量的解算帶來借鑒。
關鍵詞:傾斜攝影;空中三角測量;空三加密優化;影像;蒙板
中圖分類號:P231? ? ? 文獻標志碼:A? ? ? ? ? 文章編號:2095-2945(2024)08-0041-04
Abstract: In view of the problems of low accuracy, easy stratification and low efficiency of aerial triangulation (AT) solution for oblique photography, this paper deeply analyzes the principle of aerial triangulation and puts forward several optimization schemes of aerial triangulation data according to the characteristics of tilt photographic data, and the scheme proposed in this paper is verified by the actual data. Through the analysis of the experimental data, it can be seen that several schemes proposed in this paper can effectively improve the accuracy of aerial triangulation of inclined data, and the solution has high success rate and high efficiency, thereby can be used as a reference for the high-quality solution to aerial triangulation data of oblique photography.
Keywords: oblique photography; aerial triangulation (AT); aerial triangulation optimization; image; mask
隨著無人機低空飛行和載荷能力的逐漸提升,數碼相機重量的不斷減輕和組裝能力的不斷加強,采用無人機搭載傾斜攝影多鏡頭相機進行低空飛行,并采集傾斜攝影數據用于測繪產品的生產成為了目前主流的航空攝影方式。然而,在實際作業中可以發現,采用目前已有的軟件對傾斜攝影數據進行空中三角測量解算,存在數據解算精度低、空三成果易分層、解算效率低等問題。針對存在的問題,很多學者對其進行了研究,吳英梅[1]、楊朋荷[2]、邵金鵬[3]從多個角度對傾斜攝影空三數據解算進行了研究,提出了比較實用的解決方案,并用于實際生產中,對多種優化方案的可行性進行了驗證。邰建豪等[4]從傾斜數據高冗余方面出發,探討了冗余數據的存在原因,并針對冗余數據的特點,開發相應的軟件進行冗余數據的自動剔除,提升了數據的解算效率。本文在分析了空中三角測量的原理后,提出多種方案對傾斜數據空中三角測量解算進行優化,并以多個實際項目數據為數據源,對本文方案的可行性進行了驗證,取得了較好的效果,為同類數據的解算帶來借鑒。
1? 傾斜攝影空中三角測量原理
空中三角測量解算也被稱為空三加密,是指利用相片內在的幾何特征,根據少量的野外像控點,在室內進行同名點加密,并求得同名點的平面和高程的準確位置的一種測量方案。空三加密的整個流程主要包括影像金字塔構建、特征點檢測與圖像相似度計算、特征匹配與平差調整等[5-6]。而在進行空三加密時,其主要依據的參數是相機參數、拍照時影像的位置和姿態、影像的表征質量等。由此可見,準確的參數和高質量影像,可以有效提升空三加密成果質量,以便得到更高精度的測繪產品。
2? 傾斜攝影空中三角測量優化方案
傾斜數據的解算主要取決于影像質量、相機參數、外方位元素,從這三方面進行數據優化,可以有效提高數據的解算精度、成功率和效率,本文的數據優化方案流程如圖1所示。
2.1? 影像質量優化
影像質量是指影像的表征質量和影像每個像素點的精度。影像的表征質量即影像所表現出來的特性,如影像明暗度、曝光度、對比度和色差等[7]。影像像素的精度是指影像每個像素點的變形大小,目前常見的影像畸變有桶形和枕形2種,這2種的變形特點是影像中心點不存在畸變,越往影像邊緣,變形越大。對于影像的表征質量,可以采用勻光勻色的方法來提高。由于傾斜攝影搭載的5個相機在曝光時的進光量不同,因此其獲取的影像存在明顯的明暗度不一致,需要對其進行勻光勻色處理。常采用的方法是利用一張地物信息豐富,表征質量良好的影像為模板,對所有影像進行批處理勻色,從而提升影像質量[8]。也可以結合每個鏡頭影像的不同表現,人為地調整影像的各項參數,并將調整的各項參數記錄下來,然后按照同樣的參數,對單個鏡頭的所有影像進行批處理,從而提升影像的質量。去畸變主要從2方面入手,即利用準確的相機檢校報告,對影像進行糾正,從而得到去除畸變后的影像成果。在沒有準確的相機檢校參數時,也可以使用蒙板,來約束用于進行空三加密的影像范圍,從而降低影像畸變帶來的影響。
2.2? 相機參數優化
對于傾斜相機來說,由于其傾斜角大,通常為45°,而且鏡頭多,如果采用露天檢校場對多鏡頭相機進行檢校,其檢校費用非常高,而且能夠提供這樣檢校服務的地方較少。如果采用郵寄方式進行檢校,在運輸過程中,相機存在被損壞的風險,而且震動等外界因素也會導致相機參數發生改變,導致檢校參數無法使用。為了節約成本,一般采用軟件自檢校的方法。其思路是采用少量的照片進行空三加密,然后將外業采集的像控點進行轉刺,然后進行平差迭代解算,直到平差精度趨于穩定,然后導出每個鏡頭準確的焦距和像主點坐標值,從而獲得更精確的相機參數,起到優化相機參數的目的。
2.3? 外方位元素優化
對于無人機傾斜攝影數據來說,由于無人機姿態不穩定等原因,導致無人機安裝的姿態設備獲取的影像曝光時的姿態值與真實值相差較大。在數據解算時,如果把影像的姿態值導入并進行空三加密解算的話,會導致空三加密解算失敗。在實際作業中,一般只使用每個影像對應的空間位置坐標值。空三加密解算主要參照每張影像的位置坐標值,在進行解算的過程中,因為導入的外方位元素值準確度較低,因此空三加密后的結果出現分層、解算失敗的比率較高[9]。目前對外方位元素的優化主要從兩方面入手,一種是通過不斷空三加密解算和迭代平差,直至空三加密結果符合項目要求為止;另一種是通過不同軟件組合來進行數據的解算,首先用一款軟件獲取精度較低的外方位元素,然后用另外一款軟件,將精度較低的外方位元素作為輸入數據,導入軟件中,進行高精度數據的解算,從而完成外方位元素的優化。
2.4? 剔除冗余無效影像
空三加密優化,除了對輸入的相機參數、影像質量、外方位元素優化外,還有一個很重要的方面就是剔除不參與后續模型生產的冗余無效影像。傾斜攝影相對傳統的垂直攝影來說,有一個很大的區別就是傾斜攝影數據重疊度高,影像數量多。數據越多,軟件在解算時,需要的時間越多,而且平差難度更大,出現平差不收斂而導致失敗的比率會提高。在對冗余影像進行處理時,可結合任務范圍線,鏡頭與航線之間的關系,地形以及地物之間的關系,把范圍線外面、不參與模型生產或者不影響模型質量的影像進行剔除,這樣數據量就會減小,可以在一定程度上提升影像解算的效率和精度,而且可以提高平差收斂的比率,讓傾斜空三加密解算更容易成功。
3? 案例分析
案例一:該數據來源于某城區建模項目。在航攝時,由于航攝周期較長,加上航攝時天氣多變,導致航攝影像色差較大,太陽光被建筑物遮擋而產生的陰影較多。采用Context Capture對獲取的原始數據進行空三加密解算,在解算過程中,陰影區域匹配的錯誤點較多,整體的空三加密結果精度差,不能滿足項目要求。為了解決加密點精度低的問題,筆者在所有航攝影像中,找了一幅地物信息豐富、亮度適中的下視鏡頭影像作為模板,采用易拼圖軟件,對所有航攝影像進行勻光勻色處理。處理完成后,采用人機交互的方式,對所有影像進行查看,影像亮度適中,紋理比較清晰,整體色調基本一致。在保持其他參數不變的情況下,對處理后的影像進行空三加密解算。通過解算報告可知,處理后的加密成果,其加密點中誤差較勻光勻色前的小,粗差點也明顯減少,表明提升影像質量,可以有效提高空三加密解算精度。由此可見,影像質量的提升,可以提高數據解算的精度。
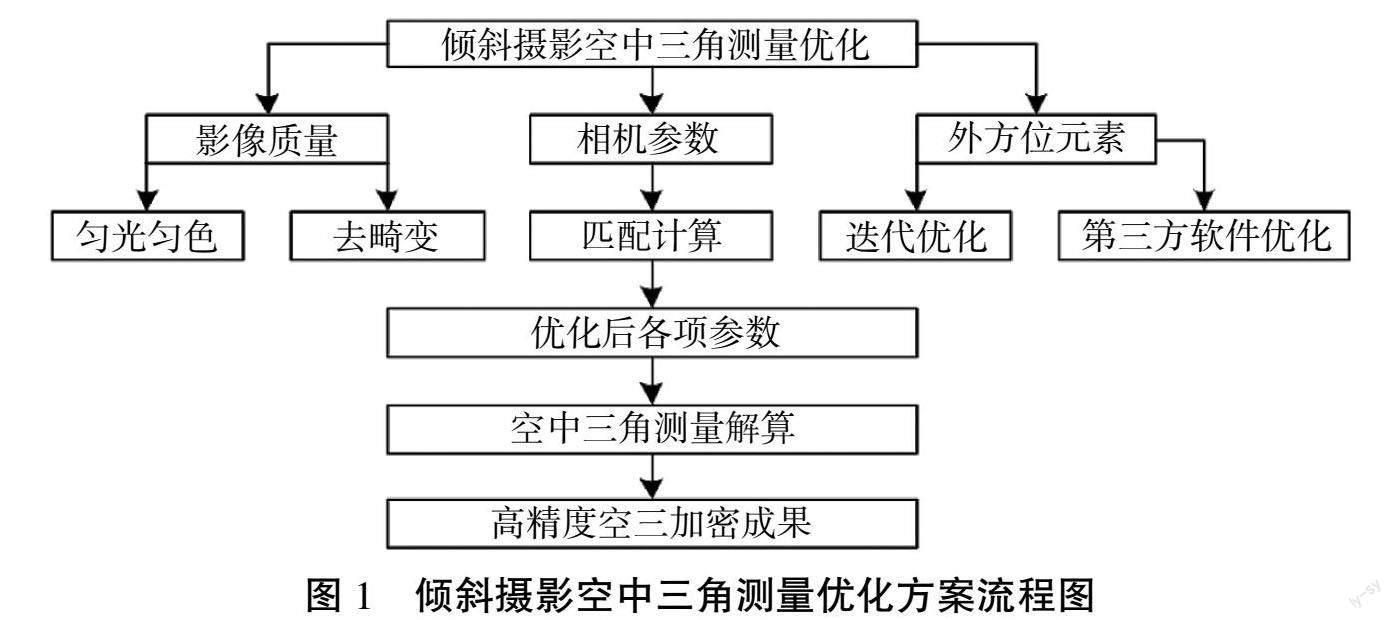
案例二:本次數據來源于農村村莊規劃項目。在進行無人機航空攝影時,選擇的傾斜設備為下視焦距25 mm,側視焦距35 mm的相機。有前期從Context Capture軟件中導出的精度較高的相機參數文件。將相機參數導入工程中并進行空三加密解算,在解算后,雖然空三成果未出現分層等問題,但是精度很難滿足項目要求,需要解決此類問題。因為采用的相機焦距為短焦,而且在獲取時,飛行的高度較低,因此航攝原始影像數據畸變較大,需要對其去畸變處理。目前,去畸變主要是通過畸變糾正軟件來完成,需要用到的相機參數包括焦距、像主點偏移坐標、徑向畸變和偏心畸變系數,這需要對相機進行檢校,費用成本高,一般不采取這種方式。在傾斜攝影數據解算中,針對影像重疊度高這一特點,一般選用蒙板來減小影像畸變對數據解算帶來的影響。蒙板是指利用和影像大小相同的一幅影像,給其命名為mask.tif,然后用黑白2種顏色對其進行填充。其中,黑色填充部分對應的區域影像不參與數據解算,白色填充部分對應的區域影像參與數據解算。本次項目航攝影像重疊度均為85%,重疊度較高,設置蒙板四邊10%的像素對應區域為黑色,并將設置好的蒙板與影像數據放到同一文件夾下,讓對應影像區域不參與空三解算。解算完成后,對優化前后的空三報告對比查看可知,優化前數據解算耗時15 h,加密點重投影中誤差為1.1個像素;優化后數據解算耗時11.5 h,加密點重投影中誤差為0.58個像素,規范固定不超過2/3個像素,表明采用蒙板進行空三解算優化,在提高效率的同時也可以提高精度。圖2所示是本次采用蒙板處理某一張影像后得到的加密點分布圖。
案例三:本次數據來源于農村房地一體項目。航攝時采用的5鏡頭相機為自己組裝起來的相機,由于購買的都是35 mm焦距的相機,為了保證5個鏡頭獲取的影像分辨率盡可能一致,人為地對下視鏡頭相機焦距進行了調整,將其調整為50 mm固定焦距,其余4個則調整為35 mm固定焦距。在進行數據解算時,輸入調整后的焦距,數據解算失敗,分析原因可能是因為焦距不準確引起的,因此對焦距進行精確解算。首先結合像控點點位分布情況,以下視鏡頭覆蓋范圍為準,挑選了120張下視鏡頭照片,并把對應的側視鏡頭照片挑選出來,共計600張照片進行空三加密解算,并轉刺了4個像控點進行平差調整,然后得到了每個鏡頭準確的相機參數。把得到的相機參數作為初始值填到原工程中進行空三加密解算,空三解算順利完成,查看加密報告,加密點重投影中誤差為0.45個像素,小于規范要求的2/3個像素,空三成果精度符合項目要求。由此可見,準確的相機參數,不但可以提升空三加密解算的成功率,而且也可以提升數據解算的精度。
案例四:本次數據來源于河湖確權登記。對于空三加密來說,帶狀數據的解算難度更大,在實際作業中,帶狀數據解算極易出現彎曲現象,是因為在平差時,使用的POS數據精度較低,基本上很難對像片數據進行約束,而是通過連接點將所有影像連接成一體,解出的物方坐標是虛擬坐標,是相對于第一張影像的相對值,通過不斷的迭代傳遞,導致最終成果因彎曲而無法使用。分析原因,是因為POS數據精度較低,因此可以通過優化POS數據精度,從而解決空三數據彎曲問題。對于帶狀數據解算而言,目前Mirauge3D軟件還是比較好用的,其在進行空三數據解算時,得到的加密點精度并不高,但是通過解算,可以得到精度較高的POS數據,而且其3個姿態數據精度也比較高。首先通過Mirauge3D軟件對數據進行解算,得到優化后的POS數據,并將其導出xml文件,然后將xml文件導入到Context Capture軟件中,再次進行空三數據解算。通過實際解算可以發現,采用2款軟件組合進行傾斜帶狀影像數據的空三解算,雖然其解算效率不高,但是解決了帶狀數據解算彎曲問題,而且第二次解算后的成果,其加密點精度均符合目前已有的規范要求。
若只有Context Capture軟件,沒有其他軟件的時候,解算帶狀數據的方法基本上只有2種,一種是通過多次對數據進行解算,并將每次解算的數據作為初始值輸入到工程中,再次進行數據解算,直到解算得到符合精度要求的成果。這種方式工作量大,而且不能保證數據解算一定會成功。另一種方法是對帶狀數據進行分塊,將一個完整的測區分成多個塊,分塊的地方需要有3~4條基線的重疊區域。對每塊進行空三加密解算,并在重疊區域提取特征點,將特征點轉刺到2個空三中,通過特征點來對分塊空三進行約束,從而保證空三精度能夠滿足接邊精度要求。這種方式作業效率雖然不高,但是很大程度上可以提升數據的解算成功率。
4? 結束語
傾斜攝影空三加密是傾斜數據解算中非常重要的一個步驟,也是傾斜數據解算中最容易出現問題的一步。針對傾斜攝影空三加密存在的各種問題,筆者分析了其原因,并給出相應的優化方案,并以不同的實際項目為例,對提出的優化方案進行了驗證。通過實際生產可知,本文提出的幾種優化方案,可以有效解決傾斜攝影空三存在的問題,可行性較強,可以為同類數據的解算帶來借鑒。
參考文獻:
[1] 吳英梅.傾斜攝影空中三角測量解算優化研究[J].黑龍江科學,2023,14(12):120-123.
[2] 楊朋荷.傾斜攝影空中三角測量解算優化研究[J].科學技術創新,2022(19):7-10.
[3] 邵金鵬.無人機傾斜攝影空中三角測量解算關鍵技術優化研究[J].科技創新與生產力,2022(5):49-51.
[4] 邰建豪,楊冉.無人機傾斜攝影冗余數據刪除算法[J].測繪工程,2022,31(4):11-17.
[5] 王鑫.Context Capture軟件空中三角測量優化研究[J].科學技術創新,2022(17):12-15.
[6] 晏軍,楊銀波,何元甲,等.無人機攝影測量三維建模與地形測量精度分析[J].測繪通報,2023(S1):54-58.
[7] 陳兆斌.無人機傾斜攝影測量不同像控點密度對地籍圖成果精度的影響[J].科技創新與生產力,2023(2):17-19.
[8] 張懂慶,魏軍,王萍.三種傾斜攝影建模軟件對比分析[J].測繪技術裝備,2022,24(3):114-119.
[9] 倪雅欣.基于Context Capture軟件傾斜攝影空中三角測量優化研究[J].科學技術創新,2022(16):9-12.