
智能網(wǎng)聯(lián)車輛節(jié)能自適應巡航控制研究
2024-03-25 09:13:34邊有鋼何慶李崇康金馨秦洪懋
湖南大學學報(自然科學版) 2024年2期
關鍵詞:模型
邊有鋼 ,何慶 ,李崇康 ,金馨 ,秦洪懋
(1.湖南大學 機械與運載工程學院,湖南 長沙 410082;2.湖南大學 無錫智能控制研究院,江蘇 無錫 214115;3.山東省科學技術情報研究院,山東 濟南 250101)
在世界范圍內(nèi),公路交通的規(guī)模正迅速增長,為人員與貨物的運輸帶來了極大便利.然而,一系列挑戰(zhàn)隨之而來,如交通事故日益頻繁、交通擁堵更加嚴峻、能源消耗不斷加速等[1].作為緩解上述問題的重要方案之一,智能網(wǎng)聯(lián)汽車(Intelligent Connected Vehicle,ICV)技術近年來獲得了廣泛研究與發(fā)展.通過搭載先進的傳感器、控制器和執(zhí)行器,并引入現(xiàn)代網(wǎng)絡與通信技術,智能網(wǎng)聯(lián)汽車不僅可以實現(xiàn)部分或完全自動駕駛,還可以利用車聯(lián)網(wǎng)(Vehicle-to-Everything,V2X)實現(xiàn)協(xié)同工作.
通過V2V 與車-路(Vehicle-to-Infrastructure,V2I)通信,智能網(wǎng)聯(lián)汽車可以獲取附近車輛行駛狀態(tài)、道路信息、交通流速和信號燈相位等信息,并基于這些豐富的交通狀況信息進行更好的自車軌跡規(guī)劃與控制[2-4].
早期針對自適應巡航控制技術(Adaptive Cruise Control,ACC)的研究較多只考慮軌跡跟蹤問題,即自身車輛根據(jù)前方領航車輛的狀態(tài)信息計算自身控制輸入,以保持期望的車輛間距[5].常用的控制算法有PID 控 制[6-7]、滑模控 制(Sliding Mode Control,SMC)[8-9]、深度強化學習(Deep Reinforcement Learning,DRL)[10]和線性二次型調(diào)節(jié)器(Linear-Quadratic Regulator,LQR)[11-12]等.在軌跡跟蹤方面,現(xiàn)有方法取得了良好的效果.
隨著智能網(wǎng)聯(lián)汽車技術的發(fā)展,汽車用戶對ACC 技術的性能提出了更多期待,如較低的能源消耗率、較少的污染物排放和較好的乘坐舒適性等.為了實現(xiàn)多型性能目標的綜合保證,基于優(yōu)化的算法逐漸得到了更多關注.Lei 等[13]利用動態(tài)規(guī)劃(Dynamic Programming,DP)算法,設計了以動力性、能耗和平順性為目標的車輛驅(qū)動方案,但由于該方案采用了全局路徑最優(yōu)解,只能用于離線計算.為減小計算規(guī)模,Dib等[14]將已知全局路徑分為多段短距離路徑,以能源消耗量和通行時間為代價,使用動態(tài)規(guī)劃設計了局部最優(yōu)速度曲線求解器;作為改進,Dib等[15]通過分析漢密爾頓函數(shù)提出了一種可以實時應用的最優(yōu)控制律.但動態(tài)規(guī)劃方法通常基于離線道路信息求解最優(yōu)軌跡,對環(huán)境的變化不能做出及時反饋,且計算負擔較重,限制了實時應用.
模型預測控制(Model Predictive Control,MPC)是一種基于最優(yōu)控制思想的算法,適合處理多輸入多輸出模型并允許施加狀態(tài)及控制輸入約束,可以考慮多種性能目標顯式設計代價函數(shù),且滾動求解優(yōu)化問題,方便用于實時控制,在車輛工程領域得到了廣泛研究與應用[16-18].在基于MPC 方法進行節(jié)能ACC 算法設計的研究中,常見的方案是將車輛加速度作為經(jīng)濟評價指標,即將加速度絕對值作為最優(yōu)控制問題的一項代價,使車輛以更平滑的速度行駛.但由于沒有采用精確的顯式能源消耗模型,上述方案的經(jīng)濟最優(yōu)性通常較差[19],基于能耗模型設計代價函數(shù)可以有效提高模型預測控制方法的經(jīng)濟最優(yōu)性[20].在對電動車輛(Electric Vehicles,EV)進行控制算法設計時,有研究人員考慮了驅(qū)動電機與動力電池的效率MAP 圖,并將制動時的能量回收納入優(yōu)化問題,進一步提高了節(jié)能效果[21].考慮到強非線性能耗模型造成的求解速度的降低,Schwickart 等[22]在分段線性模型的基礎上,采用多個線性函數(shù)的極大值近似能耗,提高了ACC 算法的實時性.Wei?mann等[23]基于能源消耗量及通行時間設計了代價函數(shù),采用DP 離線求解全局路徑的最優(yōu)速度參考軌跡,并利用MPC 進行實時控制,通過結合DP 與MPC 提高了節(jié)能效果.考慮到真實行駛場景,一些研究采用更多的環(huán)境信息設計了優(yōu)化問題,如道路坡度[24]、交通信號燈[25]和路段限速[26]等,提高了算法對不同路況的適應性.
自適應巡航控制通常使用傳感器來獲取前方車輛的狀態(tài)信息,如毫米波雷達和激光雷達等,但是由于傳感器的測量誤差和噪聲等因素的影響,所獲取到的狀態(tài)信息可能存在一定的誤差,尤其是前方車輛加速度無法精確量測.前方車輛的運動狀態(tài)變化會對后方車輛控制系統(tǒng)穩(wěn)定性和安全性造成較大影響.因此有些研究對前車的加速度進行了簡化處理,直接假設領航車輛在預測時域內(nèi)以勻速或勻加速度行駛,如文獻[19-22].此外還有些研究利用預測方程進行計算,常見的方法有非線性自回歸(Nonlinear Auto Regressive,NAR)模型[16]和馬爾可夫鏈蒙特卡洛(Markov Chain Monte Carlo,MCMC)仿 真[27]等.Morlock 等[28]利用交通歷史數(shù)據(jù),設計了基于高斯過程(Gaussian Process,GP)的未來交通流速度預測方法.上述預測方法的準確度均較低,易導致實際控制精度不理想.
隨著V2V通信技術的成熟與應用,通過實時接收鄰居車輛廣播的運動狀態(tài)信息和未來駕駛行為信息,參考軌跡的準確度有望得到顯著提高.Anselma[29]利用V2V 通信獲取前方車輛瞬時位置、速度和加速度信息,以能耗和行駛平順性作為最優(yōu)控制問題代價函數(shù).但Anselma[29]采用了動態(tài)規(guī)劃求解整個循環(huán)工況全局最優(yōu)解,無法作為實時控制算法,且只對位置跟蹤誤差做了有界約束,無法保證誤差的嚴格收斂.Spano等[30]基于前車的通信信息,采用等效能耗最小化策略(Equivalent Consumption Minimization Strategy,ECMS),設計了瞬時代價函數(shù),所提出方法可用于實時控制,然而其同樣未能保證跟蹤誤差的收斂性.
綜上所述,基于V2V通信技術,在考慮能耗優(yōu)化的同時,能夠保證軌跡跟蹤誤差嚴格收斂至零點的ACC 算法目前還較少.因此,針對上述問題,本文研究智能網(wǎng)聯(lián)車輛節(jié)能自適應巡航控制方法,主要貢獻如下:
1)以軌跡跟蹤為目標,設計了時變增益線性反饋控制律,并將反饋增益作為優(yōu)化變量,構建一個經(jīng)濟最優(yōu)控制問題以求解能耗代價最低的控制參數(shù),基于模型預測控制方法設計了節(jié)能自適應巡航控制器,能夠同時保證跟蹤誤差收斂性與燃油經(jīng)濟性.
2)通過構造共同Lyapunov 函數(shù),分析了誤差系統(tǒng)的漸近穩(wěn)定性,給出了保證跟蹤誤差漸近收斂的控制參數(shù)選取條件.
本文按以下結構組織:在第1 節(jié)對車輛縱向動力學以及車輛能源消耗率進行建模,并給出自適應巡航控制軌跡跟蹤目標;第2 節(jié)進行控制器設計和系統(tǒng)穩(wěn)定性分析,并給出保證跟蹤誤差漸近收斂的控制參數(shù)選取條件;第3 節(jié)在MATLAB 中搭建系統(tǒng)模型進行仿真驗證;第4節(jié)對本文進行總結.
1 系統(tǒng)建模
在本節(jié)中,首先建立智能網(wǎng)聯(lián)車輛的縱向動力學模型和智能網(wǎng)聯(lián)車輛的能源消耗率模型.然后,確定智能網(wǎng)聯(lián)車輛自適應巡航控制的軌跡跟蹤目標.
1.1 車輛縱向動力學建模
為簡化問題分析,本文將車輛的行駛場景限定在平直路面上,因此只需對車輛縱向運動進行控制.考慮如圖1 所示的車輛非線性縱向動力學模型,其描述如下:
式中:下標i為車輛索引;pi(t)和vi(t)分別表示車輛i在t時刻的位置與速度;Ti(t)和Tdes,i(t)分別表示實際與期望的驅(qū)動或制動力矩;mi為車輛的質(zhì)量;rw,i為車輪半徑;為集總空氣阻力系數(shù),其中CD為名義空氣阻力系數(shù),ρa表示空氣密度,Av,i表示迎風面積,ζi(t)為阻力修正系數(shù),如式(2)所示,其中表示車輛i與其前方車輛的距離,ξ1和ξ2為估計系數(shù),其反映了由于車輛間距變化引起的空氣阻力系數(shù)的變化,通過參數(shù)辨識獲取[33];ηT,i和fr,i分別為傳動系統(tǒng)效率與滾動阻力系數(shù);g為重力常數(shù);τ表示動力系統(tǒng)時滯.為簡化書寫,時間標記(t)在下文中被部分省略.
為方便控制系統(tǒng)的分析,這里引入反饋線性化技術,其已經(jīng)在諸多相關研究中被采用[34-35].反饋線性化的表達式為:
其中,ui將被設置為線性化后的系統(tǒng)控制輸入.實際控制時,系統(tǒng)確定ui后將根據(jù)式(3)計算期望力矩Tdes,i并據(jù)此控制執(zhí)行機構動作.將線性系統(tǒng)狀態(tài)向量記為xi=[pi,vi,ai]T,其中為車輛加速度.結合式(1)與式(3),可將車輛節(jié)點動力學轉(zhuǎn)化為如下緊湊形式:
1.2 車輛能源消耗率模型
本文采用弗吉尼亞理工大學研究人員提出的基于功率的綜合燃油消耗率模型(Virginia Tech Comprehensive Power-Based Fuel Consumption Model,VT-CPFCM)對車輛的能源消耗建模.瞬時燃油消耗率FC,i,g/s.采用二次多項式形式描述[36]:
其中,θ(·),i為常數(shù)系數(shù),Pd,i為車輛驅(qū)動系統(tǒng)的輸出功率,kW.其根據(jù)車輛速度和加速度進行計算:
1.3 自適應巡航控制軌跡跟蹤目標
本文考慮智能網(wǎng)聯(lián)車輛可以依靠V2V通信交換車輛狀態(tài)xi信息.
下文中使用下標“f”作為ACC 車輛的索引,即需要部署自動控制算法的車輛,下標“0”表示領航車輛.本文將ACC 軌跡跟蹤目標設置為與前方領航車輛保持期望間距,并維持速度、加速度與領航車輛一致,數(shù)學描述如下:
其中,df(t)為期望車輛間距.
恒定時距策略(Constant Time Headway,CTH)有利于穩(wěn)定性的設計,因此本文采用該策略定義車輛間距目標.將自適應巡航控制期望車輛間距設置如下[37-38]:
其中,h為車頭時距常數(shù),d0為靜止間距,即速度為0時自身車輛與領航車輛的期望間距.
定義一個向量Df(t)=[df(t),0,0]T,則自適應巡航車輛相對于領航車輛的跟蹤誤差向量可描述為:
2 控制器設計與系統(tǒng)穩(wěn)定性分析
在本節(jié)中,首先針對式(9)設計了一個時變增益線性反饋控制律.其次,將反饋增益作為優(yōu)化變量,構建一個經(jīng)濟最優(yōu)控制問題以求解能耗代價最低的控制參數(shù).再次,基于模型預測控制方法設計節(jié)能自適應巡航控制器.最后,構造共同Lyapunov 函數(shù),并分析誤差系統(tǒng)漸近穩(wěn)定性,給出保證跟蹤誤差漸近收斂的控制參數(shù)選取條件.
2.1 切換增益線性反饋控制律
自適應巡航車輛基于如下線性比例反饋控制律計算控制輸入:
其中,Kf(t)=[kp,f(t),kv,f(t),ka,f(t)]為時變的切換反饋增益,kp,f(t)、kv,f(t)和ka,f(t)分別為在t時刻的位置、速度和加速度反饋增益,其取值將由2.2節(jié)中的經(jīng)濟優(yōu)化問題的解確定.
根據(jù)零階保持假設(Zero-Order Hold Assumption)將連續(xù)時間動力學模型精確離散化,即在某一采樣時刻,將連續(xù)系統(tǒng)控制輸入uf(t)設置為與對應的離散系統(tǒng)控制輸入uf(k)相同,并在下一采樣時刻前保持不變[39].結合式(10)與式(4),可得到離散車輛動力學模型,使用如下緊湊形式描述:
2.2 經(jīng)濟最優(yōu)控制問題設計
本小節(jié)設計一個基于模型預測的經(jīng)濟最優(yōu)控制問題,以優(yōu)化式(10)中的反饋增益Kf(t).
使用Np表示模型預測控制的預測時域.在建立優(yōu)化問題前,首先給出幾個狀態(tài)軌跡相關的定義:在t時刻,分別使用代表t+k時刻的自車預測狀態(tài)軌跡和領航車輛假設狀態(tài)軌跡,其中領航車輛假設狀態(tài)軌跡在每個采樣時刻通過V2V 通信接收.不同于基于前車速度預測的方法,自適應巡航車輛直接從前車接收其未來一段時間的假設狀態(tài)軌跡,提高了參考軌跡準確性,有利于改善實際控制效果.本文中,自身預測狀態(tài)軌跡基于動力學模型推算,用于參數(shù)化優(yōu)化問題;領航車輛假設軌跡將被發(fā)送至自適應巡航車輛,其代表了領航車輛的運動趨勢,取值由其自身預測狀態(tài)軌跡確定.t時刻的預測反饋增益和最優(yōu)反饋增益分別使用表示,其中最優(yōu)反饋增益為經(jīng)濟最優(yōu)控制問題的解.在整個預測時域內(nèi),采用同一個預測反饋增益
自適應巡航車輛的基于模型預測的經(jīng)濟最優(yōu)控制問題描述為:
經(jīng)濟最優(yōu)控制問題Pf(t):
其中,lf為階段代價函數(shù),其代表了自身車輛在每個采樣時刻單位位移的燃油消耗量:
在問題Pf(t)中為最小化車輛燃油消耗量,代價函數(shù)設置為整個預測時域內(nèi)基于預測狀態(tài)計算的各采樣時刻每單位位移(m)燃油消耗量的累加.式(13)要求初始預測狀態(tài)與當前時刻真實狀態(tài)xf(t)相同;式(14)為車輛動力學約束;式(15)為反饋增益約束,考慮到系統(tǒng)穩(wěn)定性,其將在2.4 節(jié)被詳細設計與分析;考慮到驅(qū)動系統(tǒng)性能限制與乘坐舒適性,式(16)約束了控制輸入的上界與下界.
2.3 節(jié)能自適應巡航控制算法設計
本小節(jié)基于上一小節(jié)設計的基于模型預測的經(jīng)濟最優(yōu)控制問題和滾動優(yōu)化策略設計節(jié)能自適應巡航控制算法.
節(jié)能自適應巡航控制算法流程如下:
算法1:(1)在t=0 時刻,初始化最優(yōu)反饋增益和最優(yōu)控制輸入用于車輛實際控制.
(2)在任意t>0的采樣時刻:
(2.2)求解最優(yōu)控制問題Pf(t),獲得最優(yōu)反饋增益
重復步驟(2)至控制結束.
算法1的流程圖如圖2所示.
2.4 閉環(huán)誤差系統(tǒng)的漸近穩(wěn)定性分析
本小節(jié)基于上小節(jié)提出的反饋控制律,對式(9)的漸近穩(wěn)定性進行分析.結合式(10),式(9)求導可得:
若u0可被自適應巡航車輛獲取,則領航車輛的控制輸入u0可被視為誤差系統(tǒng)的參考輸入,否則u0將被視為外部擾動.無論u0是否可知,針對式(18)的問題始終為控制綜合問題.為降低理論難度,本文將控制綜合問題簡化為系統(tǒng)穩(wěn)定性分析問題,為此需要對領航車輛行駛狀態(tài)做出如下假設:
假設1:領航車輛的控制輸入和加速度均為零,即u0(t)=0,a0(t)=0,?t≥0.
采取以上假設,式(18)轉(zhuǎn)化為:
其中,Af(t)=A-BKf(t)+H.可以發(fā)現(xiàn)式(19)為線性時變自治系統(tǒng),且該系統(tǒng)的一個平衡狀態(tài)為本節(jié)將采用Lyapunov方法判斷此平衡點的穩(wěn)定性.
記λ(M)為矩陣M的特征值,用A<0 表示矩陣A的所有特征值均具有負實部.
在給出漸近穩(wěn)定性結論前,首先給出如下引理:
引理1[40]:式(20)存在對稱正定解P的充分必要條件為矩陣A∈Rn×n所有的特征值均具有負實部.
引理2(Comparison lemma)[41-42]:式(21)的解滿足式(22)中的條件.
引理3:對于切換系統(tǒng)式(23),若存在正常數(shù)δ使得對于所有的切換信號σ,式(23)在初值條件|x(0)|<δ下的解滿足不等式(24),則稱式(23)一致指數(shù)穩(wěn)定:
其中,c>0,λ>0,e為自然常數(shù).
利用上述引理,下面給出式(19)的漸近穩(wěn)定性定理及證明.
定理1:采用算法1,若P是線性矩陣不等式組(Linear Matrix Inequalities,LMIs)式(25)和式(26)的對稱正定解,Kf設置為式(27)形式,則式(19)是全局一致指數(shù)穩(wěn)定的.
其中,r、α和β為正實數(shù),且α>β>0.φf為反饋增益系數(shù).
證明:首先設計一個式(19)的共同Lyapunov 函數(shù).已知H為上三角矩陣,且其對角元素均為0,由三角矩陣特征值的性質(zhì)可以得到:
根據(jù)引理1,式(29)總存在對稱矩陣解P>0:
即式(26)總有解.
取一個二次型函數(shù)如式(30):
不難驗證Vf(t) >0.
采用符號He(A)表示矩陣A和其轉(zhuǎn)置矩陣的和,即He(A)=A+AT.結合定理1中的條件,對式(30)進行求導:
即Vf(t)隨時間增加呈指數(shù)趨勢衰減.
接下來,證明隨著時間T趨向于無窮,誤差向量收斂至零點.
記‖x‖p為向量x的p范數(shù)(p-norm).通過提取二次型矩陣特征值,可以得到:
結合式(32)、式(33)和式(34),可得到如下不等式:
根據(jù)引理3 以及式(36)的結論,式(19)是全局一致指數(shù)穩(wěn)定的.
上述證明構造了式(30)所示的共同Lyapunov 函數(shù),且反饋增益Kf(t)的切換不會影響其取值大小和衰減速度,因此實現(xiàn)了任意切換條件下式(19)的漸近穩(wěn)定性.
3 數(shù)值仿真驗證
設置領航車輛的初始狀態(tài)為p0(0)=0 m;v0(0)=15 m/s;自適應巡航車輛的初始狀態(tài)為pf(0)=-df(0) m;vf(0)=15 m/s;af(0)=0 m/s2.車輛模型參數(shù)和控制參數(shù)如表1 所示,本文中部分模型參數(shù)參考文獻[43]中的2010 款Nissan Micra 車型參數(shù).
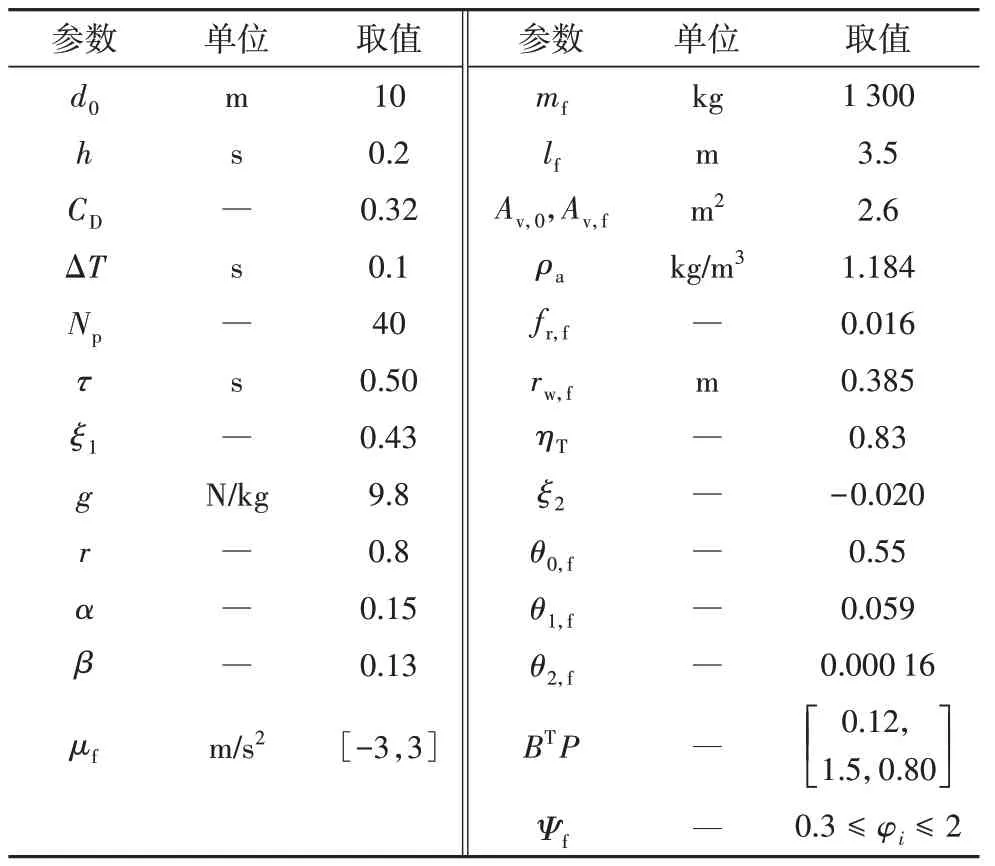
表1 節(jié)能自適應巡航控制模型及控制參數(shù)Tab.1 Energy-saving adaptive cruise control model and control parameters
本節(jié)采用的式(25)和式(26)的解為:
3.1 跟蹤性能驗證
首先,基于定理1,驗證自適應巡航控制跟蹤目標式(7)的實現(xiàn).為更貼近真實行駛工況,考慮領航車輛的速度存在變化,即假設1非恒成立.
在此場景中,領航車輛的加速度以正弦規(guī)律變化,如下式所示:
其中,加速度變化的幅度為Aa=1 m/s2;加速度變化的頻率為ωa=2π/15 rad/s.
自適應巡航車輛的狀態(tài)與跟蹤誤差仿真結果如圖3 所示,其中Δpf=p0-pf-l0為自適應巡航車輛與領航車輛的相對距離.時變反饋增益變化曲線如圖4 所示.可以觀察到,在領航車輛速度變化期間,即假設1 不成立時,各個狀態(tài)跟蹤誤差雖無法嚴格收斂,但仍保持在零點附近,此時算法的跟蹤性能是可以接受的.在領航車輛結束速度變化后,各個狀態(tài)跟蹤誤差逐漸收斂至零點,即達到式(7)條件,此結果驗證了算法1 的漸近穩(wěn)定性.且時變反饋增益的變化趨勢與領航車輛速度的變化基本一致,并最終收斂在約束下界,也說明了選取反饋增益作為優(yōu)化變量求解經(jīng)濟最優(yōu)控制問題的合理性.
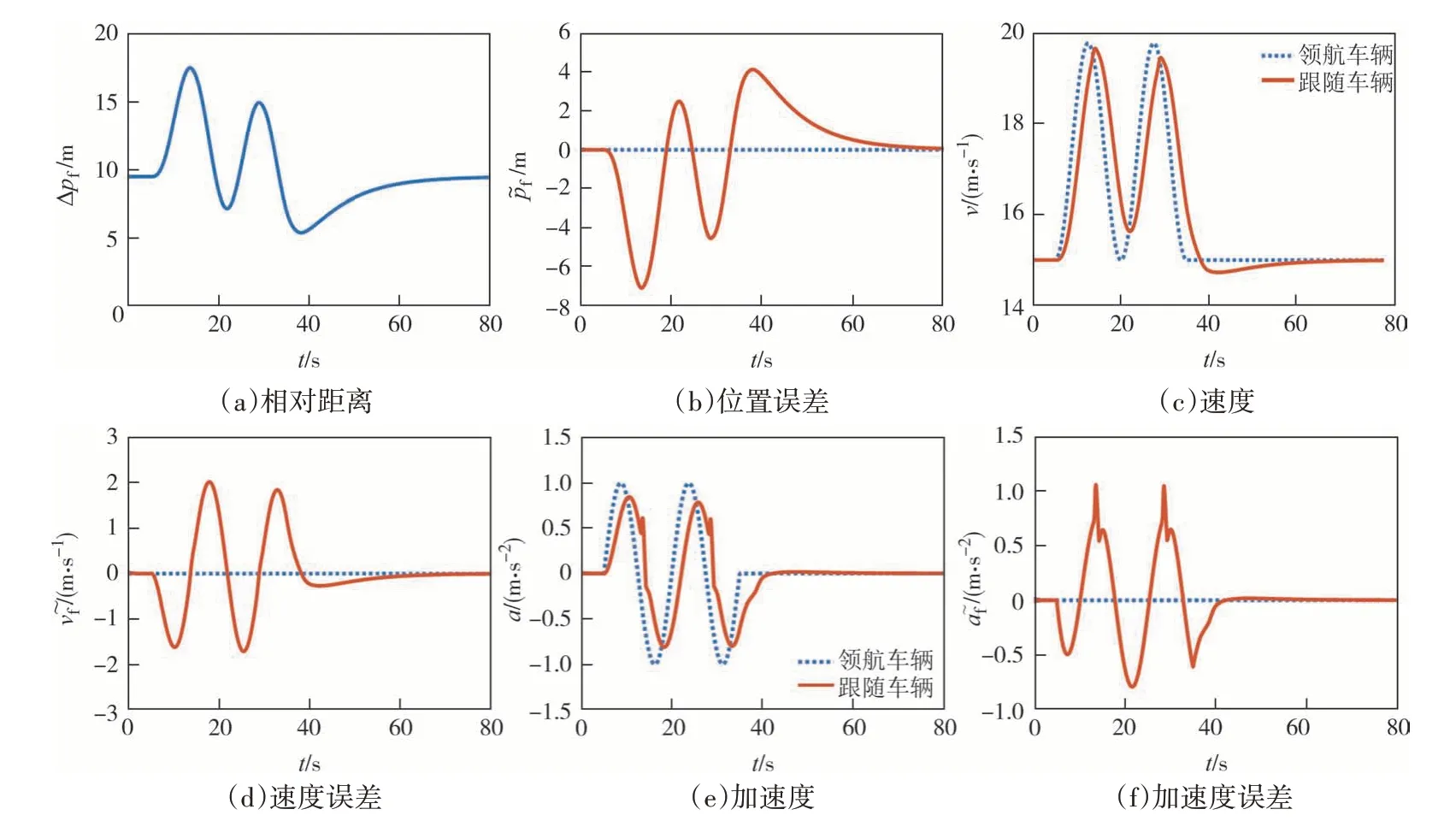
圖3 節(jié)能自適應巡航控制車輛狀態(tài)與狀態(tài)跟蹤誤差曲線Fig.3 Energy-efficient adaptive cruise control vehicle status and status tracking error curves
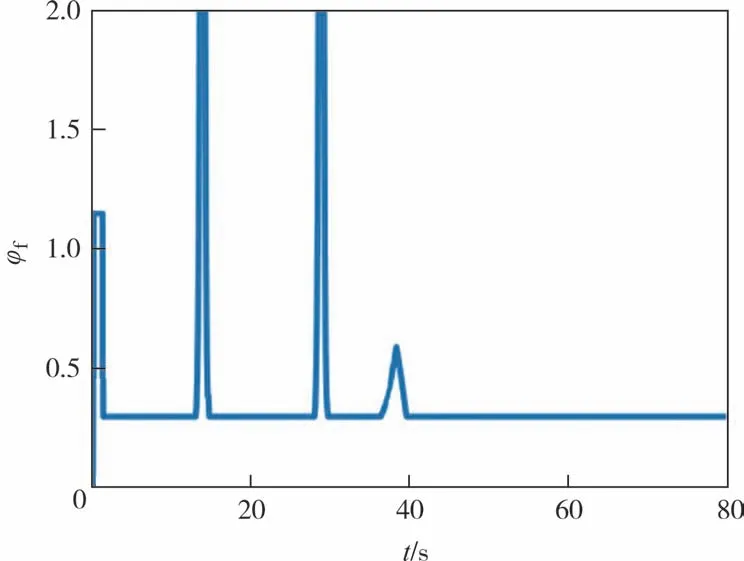
圖4 時變反饋增益變化曲線Fig.4 Time-varying feedback gain curve
系統(tǒng)模型式(4)是經(jīng)過線性化處理之后的模型,可能會導致實際控制性能和仿真結果在跟蹤精度方面出現(xiàn)偏差.圖5 為考慮不精確的線性化引起的模型不匹配和外部擾動的自適應巡航車輛的狀態(tài)與跟蹤誤差仿真結果.仿真中,動力系統(tǒng)時滯τ=0.4 +0.2 ×w,其中w∈[0,1]為均勻分布的隨機變量.另外車輛受到均勻隨機輸入干擾ud∈[-0.1,0.1],m/s2.與圖4 的仿真結果進行比較,跟蹤性能基本一致,表明了所提出的方法在線性化處理的情況下的有效性.
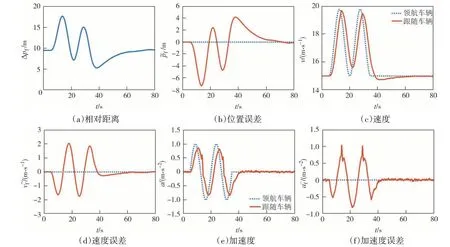
圖5 模型不匹配和輸入擾動情況下的仿真結果Fig.5 Simulations results with model mismatches and input disturbances
3.2 節(jié)能性能驗證
本小節(jié)將節(jié)能自適應巡航控制算法1,經(jīng)濟模型預測控制算法(Economic Model Predictive Control,EMPC)與兩個基準算法的控制性能作對比,驗證所提出算法在提高燃油經(jīng)濟性方面的效果.基準算法1為靜態(tài)反饋增益控制算法(Static Feedback Gain Control,SFGC),即φf(t)被設置為固定值1.25;基準算法2參考文獻[44],設置為以跟蹤為目標的模型預測控制算法(Tracking-oriented Model Predictive Control,TMPC),其最優(yōu)控制問題階段代價函數(shù)設置如下:
首先考慮與3.1 節(jié)相同的領航車輛加速度做正弦波動的工況.采用基準算法1 和基準算法2 時,自適應巡航車輛的位置跟蹤誤差如圖6 所示.行駛過程中瞬時燃油消耗率FC,f(t)曲線對比如圖7所示.總體來看,在速度變化期間,本文所提出的切換反饋增益節(jié)能控制算法具有更低的燃油消耗率.不同算法下自適應巡航車輛整個行駛過程的燃油消耗總量如表2 所示.與SFGC 算法和TMPC 算法相比,EMPC 算法的總油耗量分別降低了3.51%和4.01%.上述結果驗證了本文的節(jié)能自適應巡航控制算法在降低燃油消耗量方面的有效性.不同算法加速度正弦波動工況下的位置誤差如表3所示.比較表3位置跟蹤誤差與表2 總油耗量結果發(fā)現(xiàn),本文算法雖具有更好的燃油經(jīng)濟性,但跟蹤精度與基準算法相比有所下降,這在一定程度上體現(xiàn)了跟蹤精度與節(jié)能性能之間的沖突性.
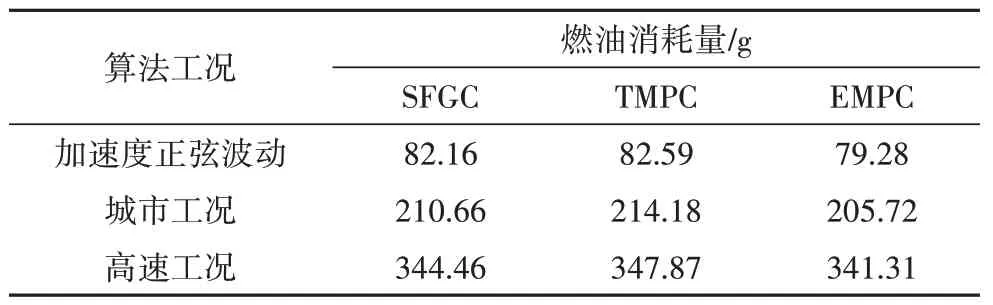
表2 不同算法與工況下自適應巡航控制油耗量Tab.2 Adaptive cruise control fuel consumption under different algorithms and operating conditions
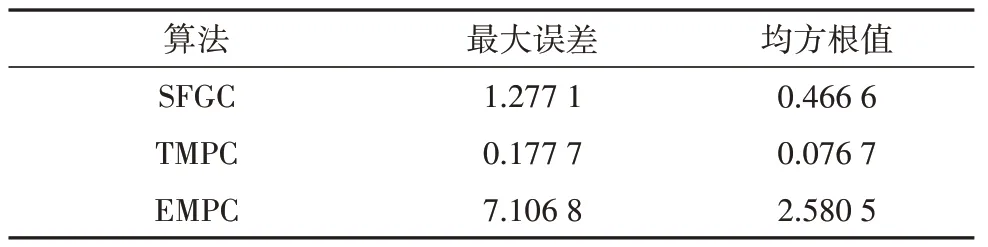
表3 不同算法加速度正弦波動工況下位置誤差Tab.3 Position error under sinusoidal fluctuation conditions of acceleration of different algorithms
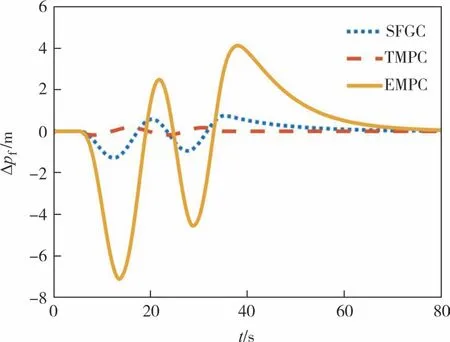
圖6 不同算法下自適應巡航控制位置誤差曲線Fig.6 Adaptive cruise control position error curve under different algorithms
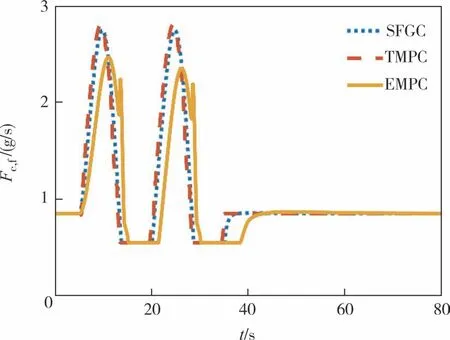
圖7 不同算法下瞬時燃油消耗率對比Fig.7 Comparison of instantaneous fuel consumption rates under different algorithms
為驗證本文所提出方法在更真實的循環(huán)工況中的性能,考慮領航車輛在城市工況和高速工況行駛,其速度曲線如圖8所示.
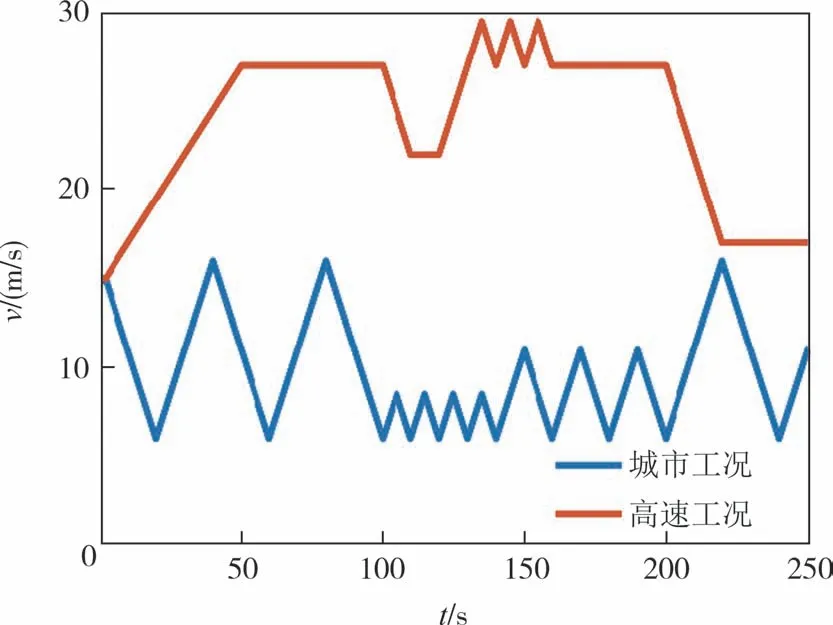
圖8 城市和高速行駛工況的速度曲線[32]Fig.8 Speed curves for urban and high-speed driving conditions[32]
在不同控制算法下,跟隨車輛的總?cè)加拖牧拷Y果列于表2中.與SFGC算法和TMPC 算法相比:在城市工況下,EMPC 算法的能耗分別降低了2.35%和3.95%;在高速工況下,EMPC 算法的能耗分別降低了0.91%和1.86%.上述結果驗證了本文所提出方法在真實工況下的有效性.另外,還可注意到在城市工況下,油耗量降低的比例更大,此現(xiàn)象說明車速波動較頻繁時,EMPC 算法可能具有更佳的經(jīng)濟性提升效果.
所提出的EMPC 算法在領航車輛加速度正弦波動工況下的計算時間如圖9 所示,求解平均計算時間為4.621 ms,明顯小于采樣時間,說明所提出的算法滿足實時性要求.
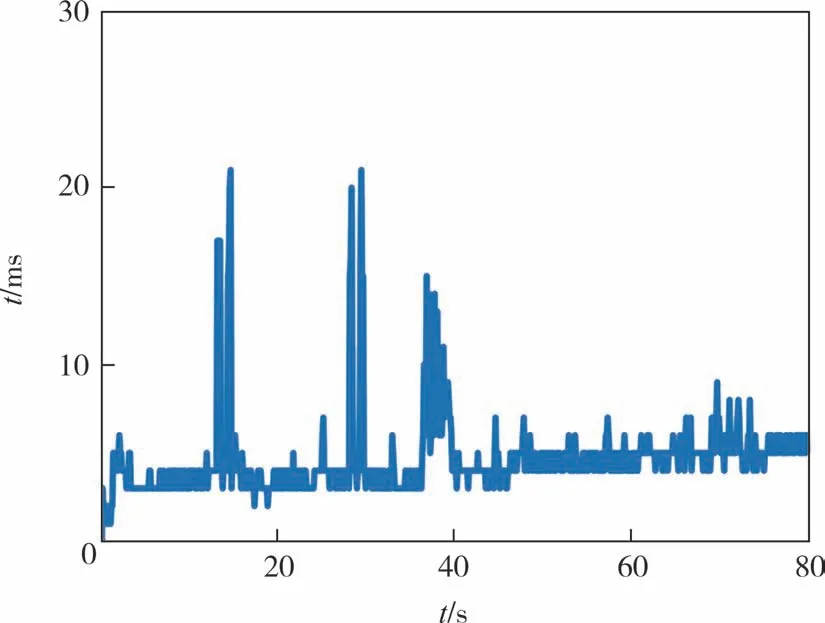
圖9 EMPC算法計算時間Fig.9 The calculation time of the EMPC algorithm
4 結論
本文針對車輛自適應巡航控制設計了以降低燃油消耗量為目標的經(jīng)濟模型預測控制器;提出的方法直接將智能網(wǎng)聯(lián)車輛的燃油消耗率作為代價函數(shù),將時變反饋增益作為優(yōu)化變量,能夠直接顯式地優(yōu)化燃油經(jīng)濟性;并且基于Lyapunov 方法和切換系統(tǒng)理論給出了閉環(huán)誤差系統(tǒng)的漸近穩(wěn)定性條件.數(shù)值仿真結果表明,本文設計的車輛節(jié)能自適應巡航控制器能夠在有誤差嚴格收斂需求的場景中,保證可接受的跟蹤精度的同時,提高車輛的燃油經(jīng)濟性.本文將車輛的行駛場景限定在平直路面上,其曲率較小,橫向運動對燃油經(jīng)濟性能影響較小,因此忽略了橫向運動的影響.如果將所提出的算法擴展到非平直路面,需要進一步考慮滾動阻力、縱向滑移率和偏航力矩等因素的影響[45].
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
