新能源船舶永磁同步電機無位置傳感器控制的研究
2024-03-26 01:32:40楊澤賢陳嘉福
船電技術 2024年3期
楊澤賢,陳嘉福
新能源船舶永磁同步電機無位置傳感器控制的研究
楊澤賢,陳嘉福
(武漢長海高新技術有限公司,武漢 430233)
為了實現新能源船舶永磁同步電機(Permanent Magnet Synchronous Motor,簡稱PMSM)全速域無位置傳感器控制,本文采用低速控制結合中高速模型參考自適應觀測器的全速域無位置傳感器復合控制算法。該方法實現了新能源船舶推進無位置傳感器控制系統的平穩可靠運行,在新能源船舶電力推進中具有較強的實際意義。
新能源船舶;PMSM;無位置傳感器;控制;模型參考自適應
0 引言
因能源短缺以及溫室氣體排放的問題,全球航運業將面臨節能減排的巨大壓力。新能源船舶具有運行成本低、零排放、無污染、噪音小等優勢,其得到了廣泛的關注[1]。永磁同步電機控制系統作為新能源船舶的動力核心,其控制系統的穩定、可靠具有重要意義[2]。永磁同步電機因其結構簡單、體積小、效率高、啟動轉矩大、運行可靠等特點,在軍事、工業等領域應用廣泛[3-4]。一般來說傳統的閉環控制需要獲得PMSM轉子的位置和速度信息實現對電機的控制。但輪船使用場景面臨溫濕度較大、振蕩較多及易受腐蝕等惡劣工況,機械式編碼器的使用將導致后期運行維護成本升高,同時機械編碼器的使用增加了硬件成本、系統復雜度以及降低了控制系統的可靠性[5]。為了實現PMSM的高精度、高動態性能,所以無位置控制就被引入新能源船舶的控制系統。
由于無位置控制技術的優異性能表現,無位置控制技術成為國內外學者的研究的熱點[6-8]。目前應用較多的是擴展卡爾曼濾波法、滑模觀測器法、模型參考自適應法等。文獻[9-10]介紹了基于滑模觀測器的轉子位置估計方法,該方法具有參數敏感性低、動態響應快、魯棒性強的特點,但卻因抖振存在,影響了控制性能。文獻[11]采用擴展卡爾曼濾波方法估計了轉子轉速,其具有良好的抗干擾性能和參數魯棒性,但卻面臨著過程噪聲統計偏差或粗差干擾的問題,不能保證在整個速度范圍內收斂。模型參考自適應算法因其簡單、易于在數字控制系統中應用,且具有優越的穩定性和收斂性[12]。
本文針對新能源船舶的永磁同步電機推進控制無位置傳感器控制系統,低速域使用I/f控制,中高速域采用模型參考自適應觀測器的控制,結合兩種控制方法實現了無位置傳感器復合控制系統的平穩運行。通過實驗驗證了上述方法的可行性和有效性,同時該方法有效的改善了新能源船舶電力推進永磁電機控制系統的性能,具有較強的實際應用意義。
1 永磁同步電機數學模型
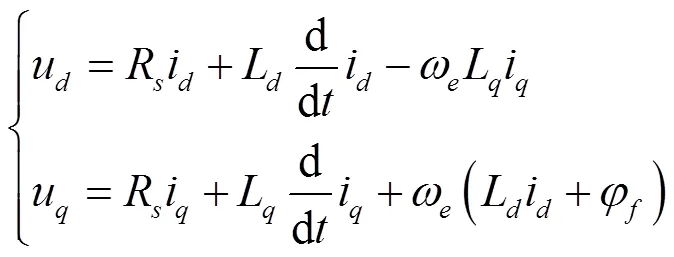
將PMSM在三相靜止坐標系下的數學模型經Clarke變換及Park變換后可得到PMSM在dq旋轉坐標系下定子電壓的數學模型方程為:
電機的機械運動方程為:
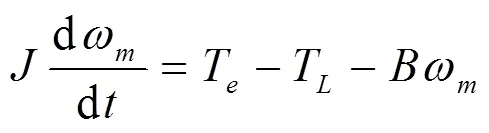
式中:ω為電機的機械角速度;為轉動慣量;為阻尼系數; T為負載轉矩; T為電磁轉矩。
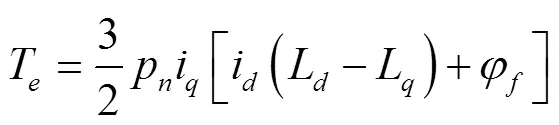
電磁轉矩方程為:
2 模型參考自適應觀測器設計
2.1 模型參考自適應系統原理
模型參考自適應法相比其他的方法具有控制相對簡單、不需要額外的信號注入、穩定性良好的特點。模型參考自適應系統通常由參考模型、可調模型以及自適應律三部分組成[13]。其中參考模型指的是不含有待估計參數的方程,而可調模型指的是含有待估計參數的方程,利用 2 個模型在同時工作時輸出量的差值輸入到自適應機構,采用合適的自適應律來不斷調節模型中估計參數,使兩個模型輸出相一致,實現參數估計[14-15]。結構原理圖如圖1所示。
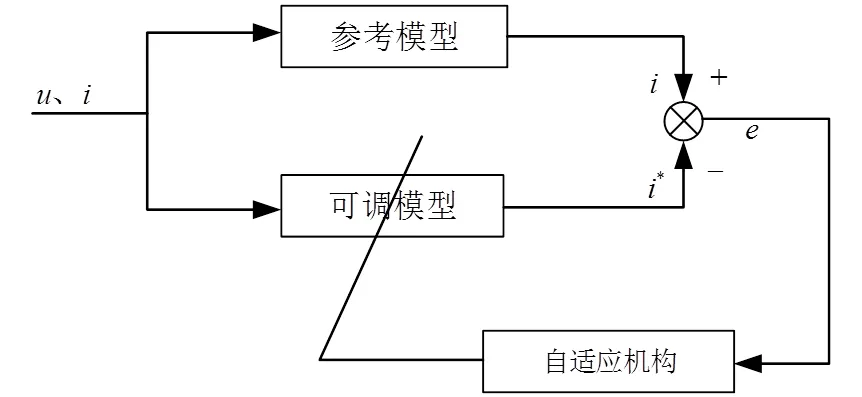
圖1 模型參考自適應結構原理圖
2.2 可調模型與參考模型的確定
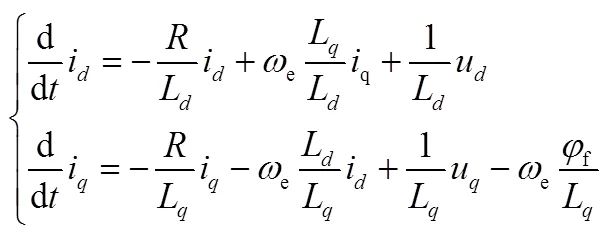
在模型參考自適應系統中,采用電流方程為參考模型,對于PMSM而言,同步旋轉坐標系下的電流方程為:
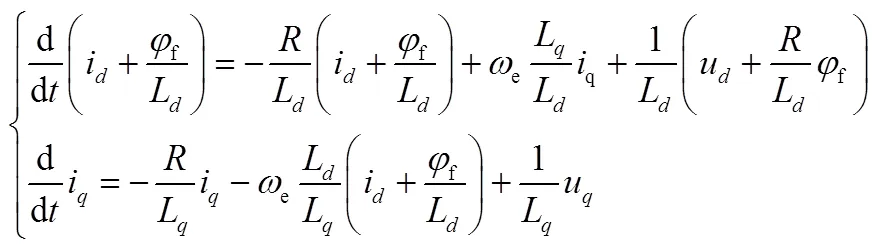
為了便于分析系統穩定性,將轉速量約束于系統矩陣中,將式(4)改寫為下面的形式:
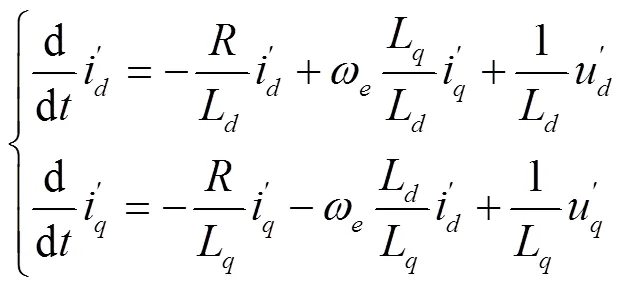
由于在式(6)中包含轉子速度信息,將式(6)以估計值表示可以得到可調模型為式(7):
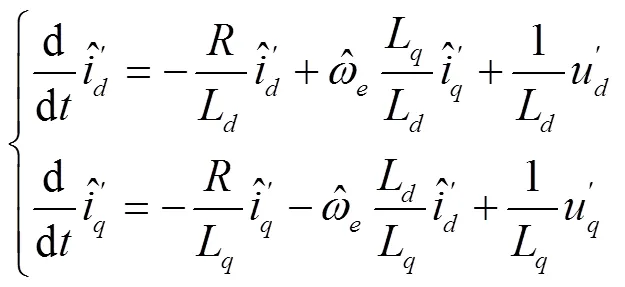
2.3 參考自適應律的確定
本文采用 Popov 超穩定性理論來設計自適應律。Popov 超穩定性理論設計的自適應率能有效地使可調模型逼近參考模型,同時保證系統的穩定性[16-17]。由此可以得到轉速的估計值:

3 復合控制系統
3.1 低速域I/f控制
目前主流的無位置控制方法是通過檢測繞組基波反電勢,然后通過基波模型得到轉子位子。但在電機的零低速啟動階段,電機繞組反電勢很小或為零,就無法準確計算轉子位置信息,不能滿足伺服系統需獲取對永磁同步電機高精度轉子位置的要求[17]。相比于V/f控制存在的不具備負載轉矩匹配能力以及V/f曲線整定困難的缺點,I/f控制是一種速度開環,電流閉環的控制方式,可以根據負載轉矩選擇合適的電流幅值[18]。
I/f流頻比啟動方式的基本思想是在電樞繞組中產生幅值跟隨參考值、頻率逐漸增大的旋轉電流矢量,使轉子加速啟動。I/f啟動的優點是此時電機工作在速度開環、電流閉環的狀態,當經過電流傳感器傳回的電流可以受到期望電流值的限制,可有效避免瞬間過流現象。I/f控制的系統框如圖2所示:
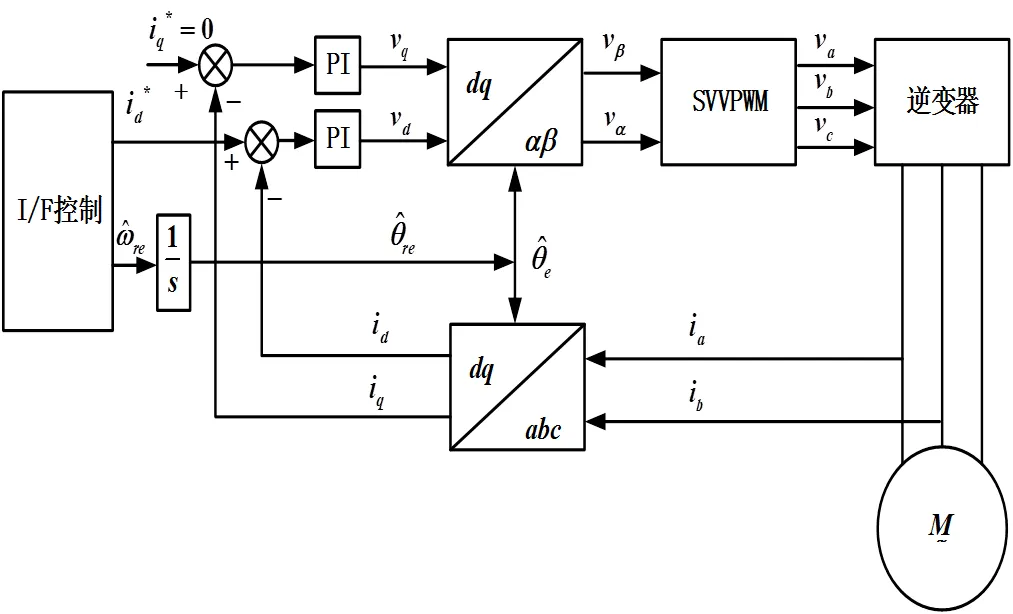
圖2 I/f控制的系統框圖
此時,電機的電磁轉矩方程為:
3.2 低速到中高速運行的切換過程
當I/f啟動成功之后,電機轉速達到一定范圍,基于模型參考自適應的觀測器可以快速準確的觀測轉子位置,此時就可以切換到模型參考自適應觀測器閉環控制運行。切換過程如圖3所示:
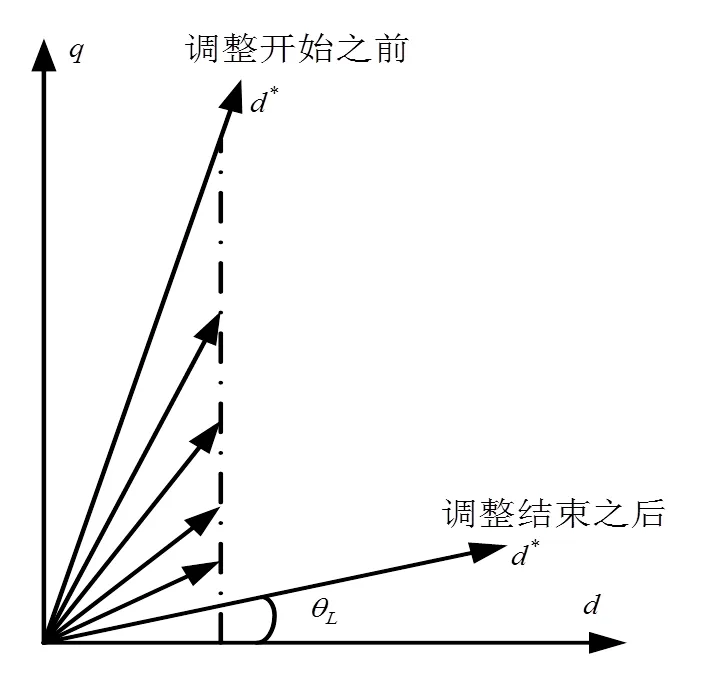
圖3 d軸切換過程


式中k為電流調整參數,t為調整的初始時刻,為調整后的時刻,其中k應合理設置來保證平穩切換。
4 實驗分析
為驗證所提出的新能源船舶PMSM無位置傳感器控制算法的有效性和準確性。本文結合如圖4所示的模型參考自適應無位置傳感器控制系統框圖進行實驗研究,控制系統由坐標變換模塊、PI模塊、SVPWM模塊、模型參考自適應系統模塊、永磁同步電機模塊、逆變器模塊等組成。

圖4 模型參考自適應無位置傳感器控制系統框圖
實驗中永磁同步電機參數如表1所示:
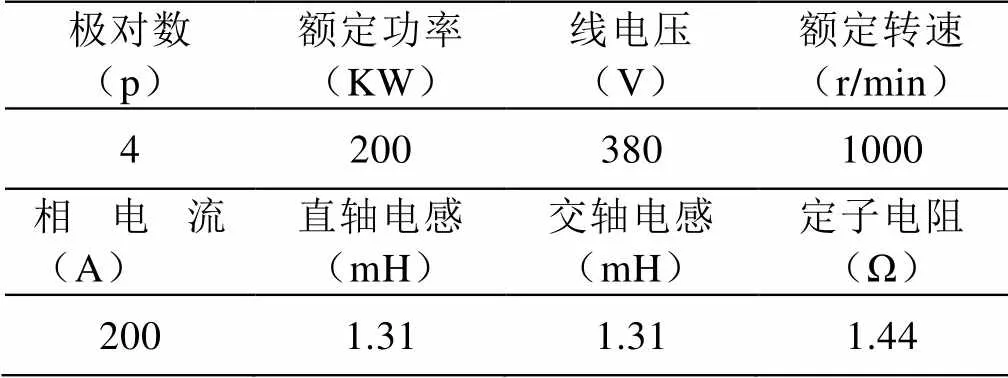
表1 永磁同步電機參數表
為了驗證該控制方法在實際系統中的的有效性,搭建了基于DSP28335的PMSM無位置傳感器控制系統的實驗平臺,如圖5所示。
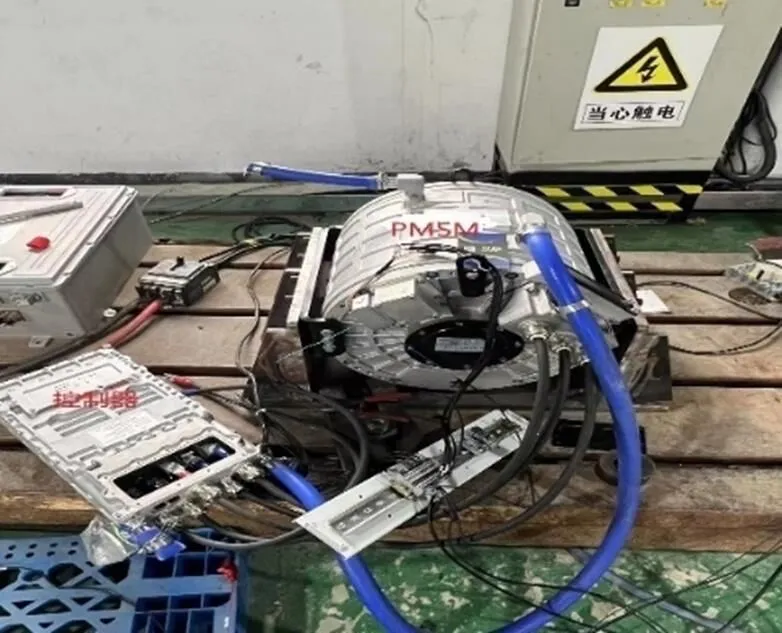
圖5 PMSM實驗平臺


圖6 開環-切換-閉環時電機轉子速度波形
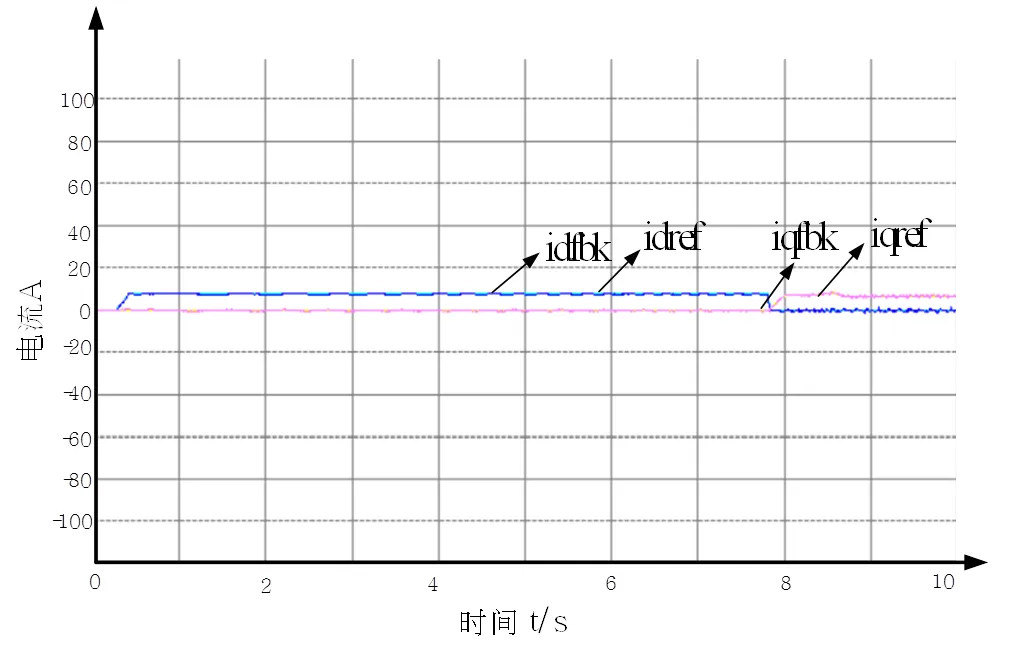
圖7 開環-切換-閉環時交直軸電流波形
5 結論
本文基于新能源船舶電力推進系統對PMSM無位置傳感器控制進行設計與開發,并進行了實驗。實驗結果表明I/f控制結合模型參考自適應的無位置傳感器復合控制策略在交流調速系統中能快速、準確地辨識轉速和轉子位置,性能良好,魯棒性強。
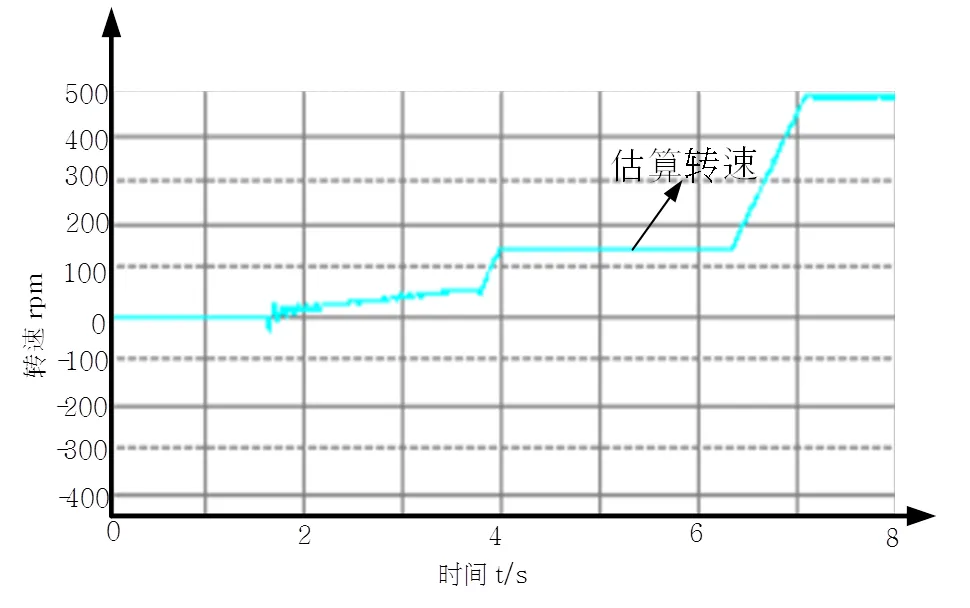
圖8 動態時電機速度波形
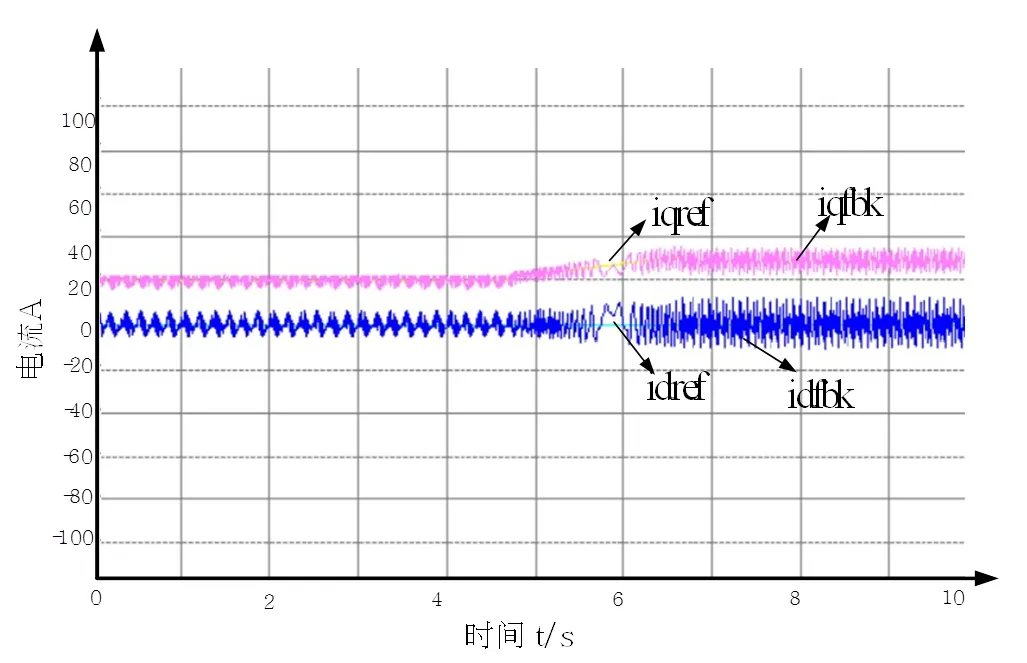
圖9 動態時交直軸電流波形
[1] 陳明志. 談新能源在船舶上應用的現狀和展望[J]. 珠江水運, 2013(13): 74-75.
[2] 何梓強. 新能源與電力電子在船舶電力推進中的應用[J]. 科技風, 2013(5): 92.
[3] 何萬青. 永磁同步電機在新能源車上的應用[J]. 時代汽車, 2023(01): 106-108.
[4] 呂從鑫, 汪波, 陳靜波, 等. 永磁同步電機控制策略綜述與展望[J]. 電氣傳動自動化, 2022, 44(4): 1-10.
[5] 生龍, 劉立昊, 葉永強. 永磁同步電機無位置傳感器控制現狀和展望[J]. 電工電氣, 2023(2): 1-8.
[6] 李勇, 胡晗, 秦貞超, 等. 基于改進模型參考自適應的永磁輪轂電機無位置傳感器控制[J]. 汽車安全與節能學報, 2022, 13(3): 560-570.
[7] 肖仁鑫, 趙晗, 胡海雙. 寬轉速范圍永磁同步電機無位置傳感器控制[J]. 組合機床與自動化加工技術, 2022(8): 53-56.
[8] 李亞輪, 黃波, 陳賀軍, 等. 基于改進的SMO永磁同步電機無位置傳感器研究[J]. 計算機與數字工程, 2023, 51(2): 509-514.
[9] 袁薇雯. 永磁同步電機的自適應滑模無位置傳感器抗擾控制[D]. 西安: 西安理工大學, 2022.
[10] 盧耀武. 基于SMO電動汽車用內置式永磁同步電機無位置傳感器控制[J]. 節能, 2021, 40(7): 46-48.
[11] 王婷, 馬繼先, 瞿云飛, 等. 基于擴展卡爾曼濾波法的船舶永磁同步電機無傳感器控制[J]. 軟件, 2020, 41(7): 255-259.
[12] 張蔚, 王家樂, 梁惺彥, 等. 混合勵磁軸向磁通切換永磁電機全速域無位置傳感器控制[J]. 中國電機工程學報, 2021, 41(13): 4646-4655, 中插25.
[13] 苗敬利, 李星, 董博. 基于模型參考自適應的永磁同步電機矢量控制策略[J]. 機械工程與自動化, 2020(6): 16-18.
[14] 鄧云霄. 全速范圍永磁同步電機無位置傳感器復合控制法研究[D]. 重慶: 重慶理工大學, 2022.
[15] 牛瑩, 路建, 尹小龍, 等. 基于DSP的模型參考自適應轉速估算方法[J]. 微特電機, 2020, 48(9): 54-57.
[16] 溫志威, 石懿晨, 楊澤賢, 等. 基于RTU的PMSM無位置傳感器低速控制算法研究[J]. 電動工具, 2020(3): 13-17.
[17] 劉計龍, 付康壯, 麥志勤, 等. 基于雙頻陷波器的改進型高頻脈振電壓注入無位置傳感器控制策略[J]. 中國電機工程學報, 2021, 41(2): 749-758, 中插33.
[18] 楊澤賢. 新型軸向磁場磁通切換電機無位置傳感器控制系統的研究[D]. 南通: 南通大學, 2020.
[19] 劉計龍, 肖飛, 麥志勤, 等. 基于雙dq空間的永磁同步電機無位置傳感器起動策略[J]. 電工技術學報, 2018, 33(12): 2676-2684.
[20] 劉計龍, 肖飛, 麥志勤, 等. IF控制結合滑模觀測器的永磁同步電機無位置傳感器復合控制策略[J]. 電工技術學報, 2018, 33(4): 919-929.
[21] 麥志勤, 劉計龍, 肖飛, 等. 基于估計位置反饋電流解調算法的改進型高頻旋轉電壓注入無位置傳感器控制策略[J]. 電工技術學報, 2022, 37(4): 870-881, 891.
[22] 付康壯, 劉計龍, 麥志勤, 等. 改進型IF控制結合有效磁鏈法的永磁同步電機全速域無位置傳感器控制策略[J]. 電工技術學報, 2022, 37(22): 5704-5716.
Research on position-sensorless control of PMSM for new energy ships
Yang Zexian, Chen Jiafu
(Wuhan Great Sea Hi-Tech Co.,LTD., Wuhan 430233, China)
TM46
A
1003-4862(2024)03-0027-05
2023-06-20
楊澤賢(1993-),男,碩士。研究方向:電機控制及驅動。E-mail: 15189770017@163.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
光學精密工程(2016年6期)2016-11-07 09:07:19
瞭望東方周刊(2016年40期)2016-11-02 18:30:31
風能(2015年4期)2015-02-27 10:14:36
風能(2015年4期)2015-02-27 10:14:34