基于雙重反饋的水炮射流穩定系統
2024-03-26 01:32:38程博森蔣奇澤
船電技術 2024年3期
程博森,楊 光,蔣奇澤
基于雙重反饋的水炮射流穩定系統
程博森1,楊 光2,蔣奇澤2
(1. 武漢船用電力推進裝置研究所,武漢 430064;2. 大連測控技術研究所,遼寧 大連 116001)
在海上執法的過程中,執法船只經常會遭遇風浪,而風浪帶來的船體晃動會導致水炮晃動,使水炮射流無法準確命中目標。現有的水炮系統多采用單反饋控制方法,沒有考慮到載體運動對水射流的干擾。為了減輕載體運動對水炮射流的干擾,本文提出了一種基于雙重反饋的水炮射流穩定系統。該系統利用IMU采集載體運動姿態,利用自回歸滑動平均模型對載體姿態進行補償;利用攝像機采集射流落點信息,通過反向傳播算法實時調整射流模型參數,并對水炮關節角度進行反饋調整。在智能水炮平臺上的實驗結果表明,采用雙重反饋機制后,水炮的射擊誤差可有效降低33%以上。
視覺反饋;載體運動反饋;水炮射流穩定;智能水炮;閉環控制
0 引言
水炮系統的發展經歷了三個階段:手動控制、電動控制和自動控制。1944年,美國的Antonio R. Marchese等人發明了固定式手操射流裝置,利用蝸輪蝸桿控制水炮的旋轉[1],奠定了現代雙軸水炮的雛形。1956年,美國的Edward Z.發明了一種遙控噴射炮塔,用電動馬達代替人工來進行驅動[2],使水炮走向電控時代。2009年,大連海事大學的李鑫設計開發了一種無線遙控水炮控制系統[3],該系統采用手動遙控的形式來控制水炮的射擊操作。2016年,大連理工大學的楊亞飛設計了一種開環控制系統,該系統能夠完成水炮的變速旋轉、目標跟蹤和自動射擊等操作[4],具有一定的自動射擊目標的能力。2020年,中國礦業大學的林達設計開發了一種具備視覺反饋的閉環自動控制系統[5],但該系統沒有考慮載體運動對射流軌跡的影響。2016年,陳學軍等[6]對消防水炮射流進行建模并作了定位補償,提高了水炮的定位速度和精度。王冬月[7]將紅外技術應用于射流定位補償,構建了閉環水炮控制系統。Zhu J等[8]利用反向傳播技術調整射流模型,提高了射流模型的泛化能力和射擊精度。然而,現有水炮系統的反饋調整過程只考慮了風速、泵功率、炮口形狀等因素對射流軌跡的影響,沒有考慮在外界因素影響下載體姿態變化對水炮射流系統的影響。本文結合視覺反饋和載體運動反饋,設計了一種基于雙反饋機制的射流穩定系統,有效降低了載體運動干擾和外界因素干擾帶來的影響,提高了水炮系統運行的穩定性。
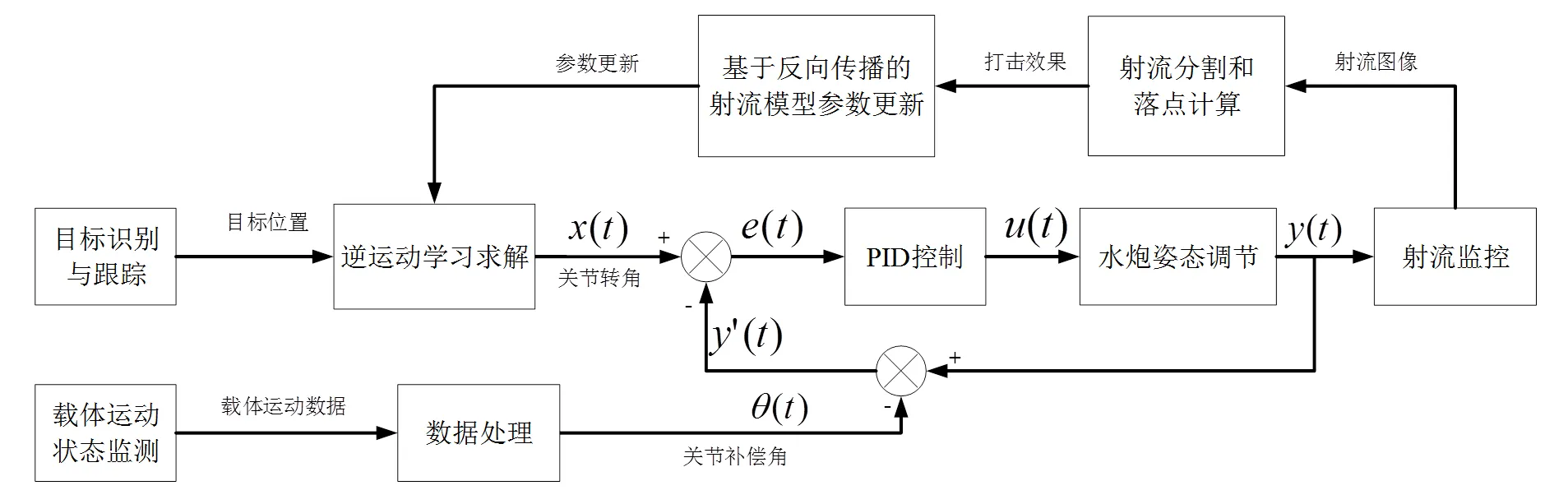
圖1 射流穩定系統控制框圖
1 射流穩定系統設計
1.1 射流穩定系統的設計思路
射流穩定系統的控制框圖如圖1所示。該系統利用攝像機采集目標信息和射流信息,并發送至控制臺內的工控主機進行數據處理,計算射流落點和目標位置之間的偏差,再根據偏差來計算和調整步長。此外,系統通過IMU(Inertial Measurement Unit,慣性測量單元)采集載體運動數據并構建誤差補償模型,對采集到的載體運動數據進行補償,以此獲得更準確的運動數據。
基于雙重反饋機制的射流穩定方法根據射流落點的偏差計算和調整步長,結合載體運動數據計算水炮各關節電機的轉角,然后控制水炮調節姿態以抵抗外部干擾,達到穩定射流的目的。
1.2 載體運動反饋
載體運動反饋由載體運動數據采集和數據調整補償兩部分構成。該系統利用IMU來采集載體運動數據,而IMU采集的數據通常需要進行誤差補償。這些誤差一般被分為確定性誤差和隨機誤差[9]。
1.2.1 確定性誤差補償
確定性誤差通常包括設備安裝誤差和內部誤差,因此需要計算安裝誤差系數和IMU校準系數,并構造校準參數矩陣[10]。
IMU的組成如圖2所示。
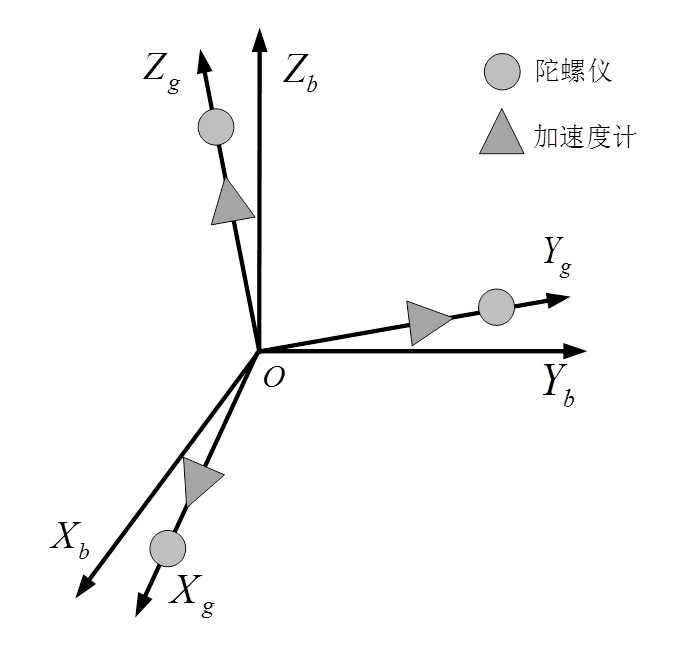
圖2 IMU安裝圖
當載體坐標系繞X軸、Y軸、Z軸旋轉的角度已知時,IMU的坐標系可由式(1)推出:
式(2)中,S,S,S為IMU的校準系數,而K,K,K,K,K,K為安裝誤差系數。
1.2.2 隨機誤差補償
本文采用ARMA-KF方法來進行隨機誤差補償[11]。卡爾曼濾波算法中估計量的變化規律可通過狀態方程來進行描述。假設k時刻的估計狀態為X,系統噪聲序列為W,則系統狀態方程為:
根據最小均方誤差準則,可得到如下6個卡爾曼濾波的基本方程:
預測方程:

濾波方程:

增益方程:

預測誤差:

估測誤差

從公式(4)-(9)可以看出,當給定初值0和0時,可以根據時刻的測量量k遞歸得到時刻的狀態估計k。應用卡爾曼濾波的困難在于難以估計隨著環境變化而變化的運動狀態方程,但ARMA通過對相應數學模型的分析和研究,可以更好地從根本上辨明這些動態數據的內在結構和復雜性。通過將誤差ARMA模型轉化為卡爾曼濾波所需的狀態空間模型,可以提高卡爾曼濾波在實際工作場景中的穩定性。
ARMA()模型可通過式(10)進行描述:

其中:為AR()模型的階數,為MA()模型的階數,它們共同組成了ARMA(,)模型的階數;i為自回歸模型的參數,j為移動平均模型的參數,ε是測量誤差序列,通常可以假設該序列是一個均值為0,方差為δ的白噪聲序列。該模型表明,隨機過程{i}在時刻的測量值與之前的個測量值和之前的個白噪聲有關。當為0時,模型退化為MA()模型,當為0時,模型退化為AR()模型
下面以ARMA(3,2)為例,將ARMA模型與卡爾曼濾波補償方法相結合,建立基于自回歸移動平均模型的卡爾曼濾波器。
根據式(10),ARMA(3,2)模型的表達式為:


將式(12)、式(13)和式(14)代入式(3),即可得到ARMA-KF的模型,進行隨機誤差補償。
1.3 視覺反饋
在水炮坐標系中,可以通過分析水炮與目標G之間的坐標關系,采用幾何分析法計算射流的偏差角。水炮與目標G的坐標關系如圖3所示:
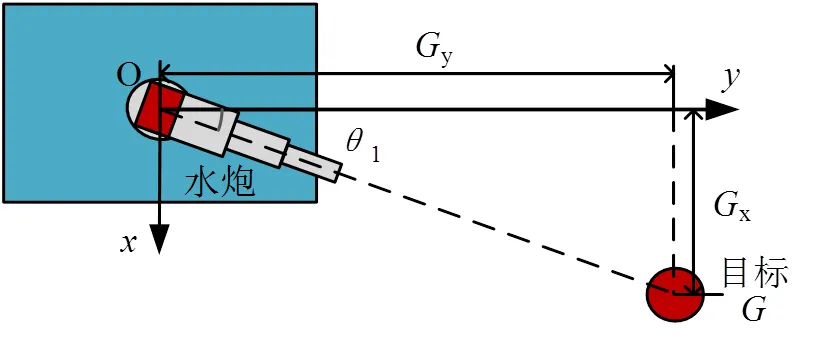
圖3 水炮與目標位置關系俯視圖
當水炮鎖定目標準備射擊時,坐標系原點O、槍口和目標中心三點共線。此時,炮管和軸之間的角度即為射流偏差角1。根據圖3所示的幾何關系,偏差角的計算公式為:

水炮的俯仰角則利用射流預測模型來進行計算,該方法分為兩個階段:利用Matlab離線擬合非線性函數以及基于反向傳播算法的在線參數調整方法[12]。
第一階段,用Matlab離線擬合非線性函數:

式(16)中,為射流落點到水炮坐標系原點的垂直距離。
第二階段,基于反向傳播算法的在線參數調整方法:對射流落點進行實時監測,計算其與目標之間的狀態關系,并根據狀態關系利用反向傳播算法實時計算調整預測模型函數的參數,提高模型精度。
反向傳播算法的步驟包括構造損失函數,計算損失函數對模型參數的導數,以及使用梯度下降法更新模型參數[15]。具體步驟如下:
步驟1:構造損失函數。用表示目標與水炮的距離,將其代入式(16),可以得到此時理論上的俯仰角為:

根據需要的調整方向,構造一個固定的損失角來調整射流模型,定義=0.1°,則實際需要的俯仰角調整角度為:
損失函數的表達式為:
步驟2:計算損失函數對模型參數的導數。
由式(19)易得:

將式(16)中的參數表示為向量形式:

根據矩陣的求導法則,可得:

為了求出損耗函數對參數的導數,利用求導的鏈式規則,將式(20)和式(22)聯立,可得:
步驟3:采用梯度下降法對模型參數進行更新。根據梯度下降理論,可以根利用(24)在線更新模型的參數,其中lr為反向傳播算法的學習率,在本方法中,該參數用于設置調整俯仰角模型時的步長。

針對環境風、泵功率、機械傳動誤差等因素影響射流運動規律發生變化的問題,采用上述方法實時調整射流模型,可使射流模型動態適應射流運動規律的變化。
2 實驗測試
為了測試本文方法的實際應用效果,搭建了圖4所示的智能水炮實驗平臺,其硬件包括:光電攝像機、水炮、水泵、控制臺、六自由度平臺。

圖4 智能水炮實驗平臺
目標固定在距水炮直線26 m處,光電攝像機安裝高度距水平面為3 m,水炮安裝高度距水平面2.5 m,目標漂浮,長3 m,寬1 m,高2 m,水炮射程60 m,六自由度平臺運動模擬5級海況。實驗按以下四步執行:
(1)發射水流對目標進行打擊,測量并計算射流落點與目標區域之間的相對誤差。
(2)將載體姿態擾動信號加載到六自由度平臺上,測量并計算射流落點與目標區域之間的相對誤差。
(3)啟用載體運動反饋,測量并計算射流落點與目標區域之間的相對誤差。
(4)啟用視覺反饋,測量并計算射流落點與目標區域之間的相對誤差。
本文采用平均絕對偏差(MAD)作為評價指標,該指標可以避免誤差相互抵消的問題,能夠準確反映實際預測誤差的大小。其計算公式為:
誤差數據i通過測量獲取,()為參考值,本文中設置為0。
2.1 射擊誤差對比
水炮射擊誤差數據記錄如下:

表1 水炮射擊誤差對比表
從表1可以看出:采用雙重反饋穩定方法于不采用穩定方法使射流落點誤差減小了約54%;比采用模型定位補償法使射流落點誤差減小約33%。
2.2 實驗效果展示
水炮射擊實驗的俯瞰效果如圖5所示:

圖5 不同工況下的射擊效果俯瞰圖
從圖5(a)和(b)可以看出,當載體開始運動時,射流受到明顯干擾,射擊精度下降,射流落點相對于目標的誤差增大。由圖5(c)和(d)可以看出,啟用雙重反饋機制后,與未啟用雙重反饋機制時相比,射流落點與目標之間的誤差明顯減小。
3 結論
本文將載體運動反饋與視覺反饋相結合,構建了一種基于雙重反饋機制的射流穩定方法,根據視覺反饋的射流落點計算調整步長,結合載體運動反饋,計算水炮各關節電機的調整角度,控制水炮執行,達到抵抗外界干擾,保持射流穩定的目的。實驗結果表明,基于雙重反饋機制的射流穩定方法可以顯著降低載體運動過程中的水炮射擊誤差,減小幅度超過33%。
[1] Ramasubramanian S, Muthukumaraswamy S A, Sasikala A. Fire Detection using artificial intelligence for fire-Fighting robots[C]//2020 4th International Conference on Intelligent Computing and Control Systems (ICICCS). Madurai: IEEE, 2020: 180-185.
[2] Rakib T, Sarkar M A R. Design and fabrication of an autonomous fire fighting robot with multisensor fire detection using PID controller[C]//2016 5th International Conference on Informatics, Electronics and Vision (ICIEV). Dhaka: IEEE, 2016: 909-914.
[3] 李鑫. 遙控消防水炮系統設計[D]. 大連: 大連海事大學, 2009: 44-60.
[4] 楊亞飛. 水炮控制系統的研發[D]. 大連: 大連理工大學, 2017: 23-48.
[5] 林達. 城市主戰消防車自動消防炮研究[D]. 徐州: 中國礦業大學, 2021: 81-94.
[6] 陳學軍, 楊永明. 消防水炮射流運動軌跡模型與定位補償方法[J]. 工程設計學報, 2016, 23(06): 558-563+611.
[7] 王冬月. 紅外艦船目標的檢測跟蹤與射流定位研究[D]. 南京: 南京航空航天大學, 2018: 46-61.
[8] Zhu J, Li W, Lin D. Real-Time Monitoring of Jet Trajectory during Jetting Based on Near-Field Computer Vision[J]. Sensors, 2019, 19: 690.
[9] Du J, Li J. A Compensation Algorithnm for Zero Drifting Error of MEMS Gyroscope[C]//Proceedings of the 2016 5th International Conference on Measurement, Instrumentation and Automation (I CMIA 2016). Amsterdam: Atlantis Press, 2016: 780-784.
[10] 鄒澤蘭, 徐祥, 徐同旭等. 一種基于改進型自適應遺傳算法的MEMS三軸加速度計標定方法[J]. 傳感技術學報, 2020, 33(10): 1450-1456.
[11] 陳明明, 高國偉, 畢新磊等. 基于ARMA建模的MEMS陀螺隨機誤差補償改進算法研究[J]. 傳感器世界, 2014, 20(05): 7-13.
[12] Rumelhart D E, Hinton G E, Williams R J. Learning representations by back-propagating errors[J]. Nature, 1986, 323: 533-536.
Water cannon jet stabilization system based on dual feedback
ChengBosen1, Yang Guang2, Jiang Qize2
(1. Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China; 2. Dalian Institute of Measurement and Control Technology, Dalian 116001, Liaoning, China)
U661
A
1003-4862(2024)03-0049-05
2023-09-28
程博森(1992-),男,碩士研究生,研究方向:電機控制。E-mail:cbs2266@126.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19