低壓微網(wǎng)并聯(lián)逆變器系統(tǒng)功率均分策略
2024-03-29 10:42:38李梓涵富立友
上海電機學院學報 2024年1期
李梓涵, 富立友
(上海電機學院 商學院, 上海 201306)
化石燃料的使用所產(chǎn)生的溫室氣體對環(huán)境影響嚴重,迫切需要可再生能源來代替一部分的化石能源[1]。然而,由于可再生能源的波動性、隨機性,不能直接作為電源進行供電,需通過逆變器接入微網(wǎng)。但隨著用電量的增加,單臺逆變器的容量已無法滿足需求,需要采用多臺逆變器并聯(lián)的方式進行擴容[2]。
在低壓微網(wǎng)中,下垂控制在逆變器并聯(lián)運行中得到了廣泛應用,但由于各線路之間的參數(shù)差異,導致傳統(tǒng)的下垂控制無法實現(xiàn)功率的合理分配[3]。對此國內(nèi)外學者展開了大量的研究,大致為兩種思路[4]:直接調整下垂控制的參數(shù)和利用虛擬阻抗補償各線路之間的參數(shù)差,即間接對下垂控制進行改進。文獻[5]提出增大下垂系數(shù)可以實現(xiàn)功率的均分,但下垂系數(shù)過大會導致公共負載處的電壓跌落更嚴重,對系統(tǒng)的穩(wěn)定性造成影響。文獻[6]提出了對下垂控制的系數(shù)實行變步長控制策略,相對與固定下垂系數(shù)而言,更加靈活,但對功率分配不均的改善不明顯,且系統(tǒng)穩(wěn)定性差。文獻[7]提出引入虛擬阻抗,但參數(shù)固定且難以整定的問題,導致功率均分效果差,且會帶來母線電壓的二次跌落。文獻[8]系統(tǒng)的額定電壓當中引入一個幅值很小的諧波信號,該信號改變了阻抗角,導致功率因數(shù)發(fā)生改變,從而調節(jié)了系統(tǒng)的功率分配,但該諧波容易被一些控制器放大,使得電壓發(fā)生畸變。文獻[9]采用虛擬復阻抗,通過改進下垂控制環(huán)節(jié)的比例積分控制器來優(yōu)化系統(tǒng)功耗,減輕阻抗的不利影響,然而復阻抗值難以確定,且可能對功率的平衡產(chǎn)生負面效果。文獻[10]在下垂控制中加入一個阻抗角變量,通過微分環(huán)節(jié)進行控制,但過多的微分環(huán)節(jié)對高頻噪聲敏感,且忽略了對系統(tǒng)的電壓和頻率的分析。
以上的研究中較少考慮到線路參數(shù)未知、負荷波動等不確定因素的影響,且缺乏對系統(tǒng)電壓和頻率的分析。對此本文采用自適應虛擬阻抗對下垂控制進行改進,在線路參數(shù)未知,負荷變化等不確定情形下,實現(xiàn)有功均分,并且加入了電壓、頻率補償環(huán)節(jié),改善因虛擬阻抗的引入所導致的公共點電壓跌落和頻率波動,最后在電壓電流環(huán)中采用SOGI和QPR 控制器代替?zhèn)鹘y(tǒng)PI控制器來提高系統(tǒng)的跟蹤能力。
1 逆變器并聯(lián)分析
1.1 傳統(tǒng)下垂控制
以2臺逆變器并聯(lián)為例,通過戴維南定理,得到并聯(lián)逆變器的等效模型如圖1所示。

圖1 并聯(lián)逆變器的等效模型
U1、φ1 分別為逆變器的輸出電壓的幅值和相位;Z1、Z2為線路阻抗,ZL為公共負載阻抗,UL為公共負載電壓的幅值。第i個逆變器發(fā)出的有功功率Pi和無功功率Qi分別為
低壓微網(wǎng)中,線路阻感比大,電抗可以忽略不計,整個線路呈阻性,則阻抗角θi=0,sinθi=0,cosθi=1。且各個逆變器的輸出電壓相位很小,即sinφi=0,cosφi=1。式(1)、式(2)可化簡為
式中:Ri為線路電阻。
由式(3)、式(4)可知,逆變器輸出的有功功率取決于逆變器和負載間的電壓差,而無功功率由它們的相角差決定。因此可以得到低壓微網(wǎng)的逆變器下垂特性的表達式為
式中:U、f、P、Q分別為逆變器實際輸出的電壓、頻率、有功功率和無功功率;Un、fn、Pn、Qn為電壓、頻率、有功功率和無功功率的額定值;kp、kq為下垂系數(shù)。
逆變器下垂控制框圖如圖2所示,通過采集逆變器輸出電壓uo(abc)、輸出電流io(abc)進行功率計算,再代入到下垂控制中得到電壓參考值uref,與采集的電感電流iL(abc)經(jīng)過電壓電流環(huán),得到SPWM 的調制信號Tz,對逆變器的開關管進行驅動[7]。
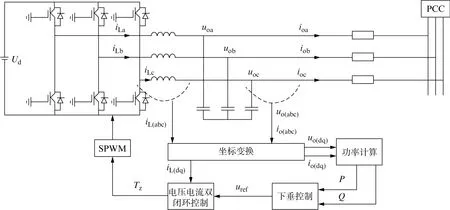
圖2 逆變器下垂控制框圖
1.2 有功功率不均分的原因
以2臺逆變器為例,各個支路的阻抗分別為:Z1=R1+jX1,Z2=R2+jX2;電阻差和電抗差分別為:ΔR=R1-R2,ΔX=X1-X2。兩支路的電壓降落分別為
式中:dU1、dU2均為電壓降落;ΔU1、ΔU2均為電壓降落的縱分量。
將電阻差和電抗差代入到式(7),得
根據(jù)圖1,列寫基爾霍夫電壓方程組,即
該方程組通過作差得到dU1-dU2=U1-U2,再利用有功下垂特性表達式可得
利用式(9)減去式(8),再聯(lián)立式(11),得到
在低壓微網(wǎng)中,當系統(tǒng)處于穩(wěn)定時,逆變器有相同的工作頻率,在下垂控制的作用下,無功功率能夠實現(xiàn)均分,則式(12)可化簡為
由式(13)可見當并聯(lián)逆變器各支路存在阻抗差時,會導致電壓降落差的出現(xiàn)。若公共負載上的額定電壓不變,電壓降落大的支路,對應逆變器輸出的有功功率小,導致有功出力不均且與之并聯(lián)的逆變器會對其進行補償,進而形成環(huán)流,造成能量的損耗[8]。
2 自適應虛擬阻抗的引入
2.1 定值虛擬阻抗
多逆變器并聯(lián)時,采用常規(guī)的下垂控制策略,由于各個線路存在阻抗差,是無法實現(xiàn)功率的均分。通常會采用加入虛擬阻抗的方法來消除線路阻抗差,在下垂控制環(huán)節(jié)與電壓電流環(huán)控制環(huán)節(jié)之間添加一個虛擬阻抗,可以起到減小或補償線路阻抗的作用,從而減小各個線路之間的阻抗差。加入虛擬阻抗后系統(tǒng)的控制框圖如圖3所示。虛擬阻抗的引入,其本質是初始參考電壓uref(dq)減去虛擬阻抗(Rv+jωLv)上面的壓降io(dq)(Rv+jωLv),得到新的參考電壓u*ref(dq)作為電壓電流環(huán)的輸入。
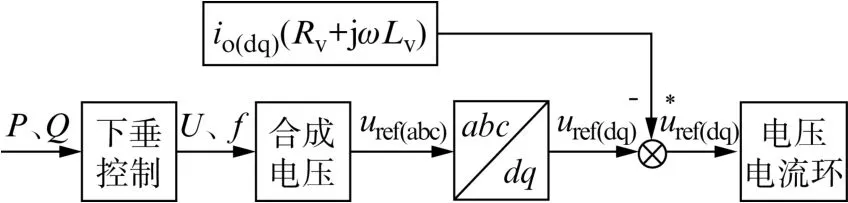
圖3 虛擬阻抗的控制框圖
2.2 自適應虛擬阻抗
但在實際應用中,由于各個逆變器所在線路的導線長度,分裂次數(shù),對地高度不同以及線路上的負載不同,導致線路的等效阻抗難以確定。因此無法確定虛擬阻抗值的大小。為了使得虛擬阻抗能夠根據(jù)線路等效阻抗的變化自行調整其大小,需要給它引入自適應的調節(jié)特性。
在電力系統(tǒng)中,電阻消耗有功,電抗消耗無功。由此可見,阻抗的大小與功率相關。將有功功率進行均值耦合,再經(jīng)過PID控制器的調節(jié),虛擬阻抗的整定可實現(xiàn)自適應調節(jié)[11]。則
式中:Rv為虛擬電阻,Kp、Ki、Kd分別為PID 控制器的比例、積分、微分系數(shù),Pi為第i臺逆變器的有功功率、Pav為有功的平均值。
在低壓微網(wǎng)中,當逆變器1輸出的有功功率P1大于逆變器2輸出的有功功率P2時,則P1一定大于兩者的平均功率Pav,P2也一定會小于Pav。由式(14)可知,P1與Pav的差值為正值,通過PID 調節(jié)的虛擬電阻值也為正值,會使得逆變器1的線路阻抗增大,同理可知逆變器2的線路阻抗減小,使得線路阻抗匹配,功率實現(xiàn)均分。
3 電壓電流環(huán)控制策略
3.1 電壓外環(huán)控制策略
電壓外環(huán)采用二次廣義積分控制器。二次廣義積分控制器是由兩個并聯(lián)的積分器和可調節(jié)的諧振器所組成,其傳遞函數(shù)有帶通濾波器和低通濾波器兩種形式[12],分別為
式中:S為傳遞函數(shù)的自變量;K為閉環(huán)系統(tǒng)的增益;W0為被跟蹤對象的角頻率。
從式(15)、式(16)可知,Q(S)相對于D(S)少了一個微分環(huán)節(jié),微分環(huán)節(jié)對高頻特別敏感,若系統(tǒng)受到一個類似于sin(ωt)的噪聲的干擾,經(jīng)過了微分環(huán)節(jié)后,變?yōu)閣cos(ωt),其幅值變?yōu)榱嗽瓉淼膚倍。這說明該噪聲頻率越高,對帶有微分環(huán)節(jié)系統(tǒng)的影響就越明顯。因此Q(S)具有更好的抗干擾能力[13]。
3.2 電流內(nèi)環(huán)控制策略
電流內(nèi)環(huán)采用準比例諧振控制器。準比例諧振控制器QPR是在比例諧振控制器PR的基礎上進行了相位補償,增加了相位裕度,使得系統(tǒng)更加穩(wěn)定。其傳遞函數(shù)如下:
式中:Kpa、Kr、ωc分別為比例增益、諧振增益、截止頻率。
不同參數(shù)下的準比例諧振控制器伯德圖如圖4所示。只調節(jié)比例增益值,整個幅頻特性曲線會隨著比例增益的增大而上升系統(tǒng)的動態(tài)性能更好,調節(jié)所需的時間更短,但過大的比例增益會造成系統(tǒng)的不穩(wěn)定;只調節(jié)諧振增益值,可以看到中頻段受到它的影響最大,且二者呈正相關;只調節(jié)截止頻率值,可以看到它與控制器的帶寬是呈正相關的,適當?shù)脑黾咏刂诡l率可以提高對諧波的抗干擾能力。

圖4 準比例諧振控制器伯德圖
綜上所述,只有充分權衡各個參數(shù)大小對系統(tǒng)的利弊,才能對參考電流進行零穩(wěn)態(tài)誤差的追蹤[14]。
4 電壓和頻率的補償
下垂控制會導致公共負載的電壓發(fā)生跌落,而虛擬阻抗的加入會使得該電壓發(fā)生二次跌落。虛擬阻抗引入后新的參考電壓為
式中:io(dq)為逆變器的輸出電流。
由此可見新的參考電壓相對于原先的參考電壓發(fā)生了電壓降落。為了確保電能的質量,需要對下垂控制的輸出電壓進行電壓補償[15]。采用一個閉環(huán)控制系統(tǒng),以公共負載的額定電壓作為參考值與下垂控制的輸出電壓作差得到誤差,通過PID控制得到補償電壓為
式中:uref為參考電壓;uc為補償電壓。
經(jīng)過電壓補償后的有功下垂控制為
同理為了達到頻率的無差調節(jié),也需要對頻率進行補償,通過PID控制得到的補償頻率為
式中:fref為參考頻率;fc為補償頻率。
通過頻率補償后的無功下垂控制為
5 仿真分析
為了驗證改進下垂控制的有效性,在Similink當中搭建兩臺逆變器并聯(lián)且孤島運行的仿真模型。仿真時間為3s。仿真參數(shù)設計如表1所示。

表1 仿真的參數(shù)設計
5.1 常規(guī)下垂控制仿真
兩臺并聯(lián)逆變器帶公共負載的運行情況如圖5、圖6所示。并聯(lián)逆變器開始運行時只帶有功功率為20kW、無功功率為20kvar的負載1。在1s后加入有功功率為10kW、無功功率為10kvar的負載2,在2s時斷開負載2。從圖中可知,在低壓微網(wǎng)中采用傳統(tǒng)的下垂控制,無功功率始終可以實現(xiàn)均分:在前1s兩臺逆變器各自輸出相同的無功功率10kvar,兩者之和恰好為負載的無功功率20kvar;在1到2s加入了負載而后,兩臺逆變器同樣輸出相同的無功功率15kvar,兩者之和與負載1和負載2的無功功率之和30kvar是相等的。但由于兩臺逆變器之間的線路阻抗差異,導致傳統(tǒng)下垂控制無法實現(xiàn)有功功率的均分:在前1s時逆變器1輸出的有功功率大約為9kW,逆變器2 大約為11kW,兩者之間差2kW;1到2s之間增加了負載2后,逆變器1輸出的有功功率為13.5kW,逆變器2大約為16.5kW,兩者之間差了3kW,由此可見,隨著公共負載的增加,并聯(lián)逆變器有功輸出不均將會更加嚴重。
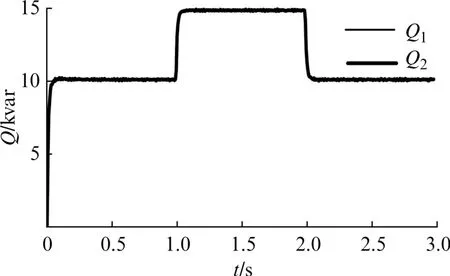
圖5 傳統(tǒng)下垂控制下的無功功率
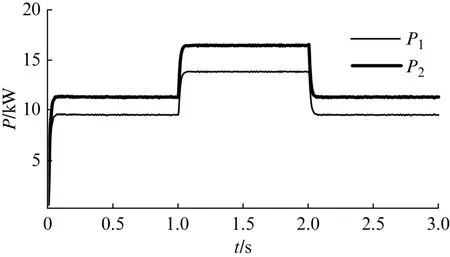
圖6 傳統(tǒng)下垂控制下的有功功率
5.2 引入自適應虛擬阻抗的下垂控制仿真
兩臺逆變器采用了改進的下垂控制策略后,運行情況如圖7、圖8所示,無論是有功功率還是無功功率在加入負載2的前后都可以按照下垂系數(shù)實現(xiàn)均分,且當負載發(fā)生變化時,虛擬阻抗也能夠自動調節(jié),以適應阻抗的變化。
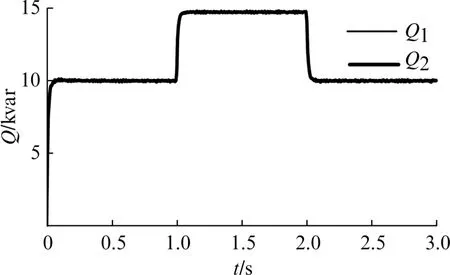
圖7 改進下垂控制下的無功功率

圖8 改進下垂控制下的有功功率
5.3 電壓補償以及頻率分析
由同步發(fā)電機的下垂特性可知,采用該控制策略會導致公共母線的電壓降落,而虛擬阻抗的引入雖然消除線路之間的阻抗差達到均分有功的目的,但會使得電壓降落更嚴重。因此必須給下垂控制環(huán)節(jié)增加電壓補償。電壓補償前后的對比圖如圖9所示,無補償環(huán)節(jié)時,公共母線電壓大約由311V降落到305V;增加了補償環(huán)節(jié)后,公共母線電壓最多跌落到到310V 左右。滿足公共母線電壓偏差±5%以內(nèi)的規(guī)定。
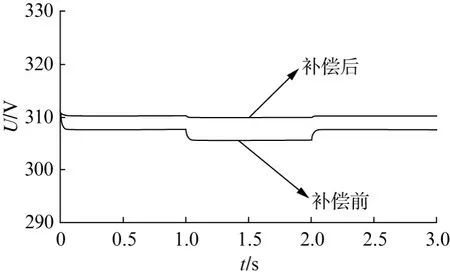
圖9 電壓補償前后對比圖
系統(tǒng)的頻率補償前后的對比圖,如圖10所示。經(jīng)過頻率補償環(huán)節(jié)后,負荷在1s時投入,頻率會略微下降后,立即恢復到50Hz;在2s時負荷切除,頻率經(jīng)過略微上升后,立即恢復到50Hz,并保持不變,滿足小容量電力系統(tǒng)的頻率偏差在±0.5Hz內(nèi)的規(guī)定。
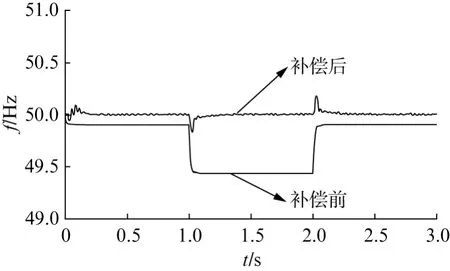
圖10 頻率補償前后對比圖
6 結 論
本文首先分析了常規(guī)下垂控制的原理以及其無法實現(xiàn)有功功率均分的原因。其次考慮到線路參數(shù)無法整定,引入自適應虛擬阻抗的改進下垂控制,解決了低壓微網(wǎng)中有功均分的問題,并且加入了電壓和頻率補償環(huán)節(jié)改善了公共點的電壓跌落和頻率波動問題。最后在電壓電流環(huán)中采用二階廣義積分和準比例諧振控制器代替?zhèn)鹘y(tǒng)的PI控制器來提高系統(tǒng)的跟蹤能力和電能質量。