基于柔性鉸鏈結構的大口徑壓電快擺鏡
2024-03-31 00:08:58時運來孫海超
壓電與聲光 2024年1期
關鍵詞:設計
王 強, 時運來,孫海超,李 興,劉 偉
(南京航空航天大學 航空航天結構力學及控制全國重點實驗室,江蘇 南京 210016)
0 引言
望遠鏡是人類文化最偉大的奇跡之一,它既對天文學領域的發展做出了巨大的貢獻,也深刻影響著其他科學的發展甚至整個人類社會的進步,改變了人類對宇宙的認識。17世紀,伽利略發明第一臺天文望遠鏡是人類探索外空的起點,經過幾百年的時間,人類對外太空有了越來越深刻的了解。深空探測是人類探索宇宙奧秘的必經之路,是在近地觀測取得重大進展的基礎上,向太空等未知領域探索的必然拓展[1]。
在光電追蹤系統中[2],使用普通的跟蹤系統精度都較低,無法達到使用要求,因此,國內外常采用復合軸樣式的控制系統[3]。通過復合軸控制系統,既可以提高追蹤系統的搜尋范圍,又可以提高追蹤精度[4]。復合軸控制系統由兩部分組成,分別是主跟蹤軸和子跟蹤軸[5]。主跟蹤軸由主架組成,它實現了大范圍的搜尋,因此也被稱為粗跟蹤軸;子跟蹤軸由快擺鏡組成,通過快擺鏡系統進行高精度的調節,因此稱為精跟蹤軸[6]。
美國幾家單位聯合建造了大麥哲倫地基望遠鏡[7],成效清晰度遠超哈勃望遠鏡。它通過多個快擺鏡機構組合的方式來提高成像精度,每個小快擺鏡均高達0.039"[8]。國內中科院設計了一塊使用壓電作動器驅動的三點式快擺鏡,用于激光檢測領域[9]。此快擺鏡在精度小于4 μrad的情況下,同時有著雙軸5 mrad的擺動范圍,隨著通光孔徑不斷增大,對偏轉范圍的要求也越來越高,故而迫切需要研究出既能滿足大通光孔徑,又能實現大偏轉范圍的快擺鏡[10]。
壓電驅動器作為驅動元件,其具有分辨率高、輸出作用力大和響應速度快的特點,由于壓電驅動器的伸長量較小,限制了大口徑快擺鏡的偏轉角度的大小,所以需設計一款柔性鉸鏈放大機構來放大壓電驅動器的輸出位移[11]。
本文設計了一款單軸繞軸心擺動的大口徑快擺鏡,通過杠桿式的結構對壓電驅動器的位移進行了三級放大,并以柔性軸承作為快擺鏡的運動關節來提高精度[12]。
1 快擺鏡整體設計
1.1 設計要求及工作原理
圖1為快擺鏡原理示意圖。快擺鏡指標有以下要求:
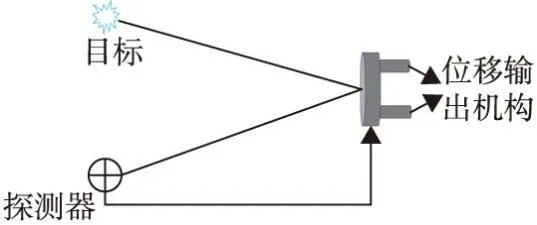
圖1 快擺鏡原理示意圖
1) 通光口徑:長軸>250 mm,短軸>180 mm,繞長軸轉動;
2) 轉動范圍:>±2 mrad;
3) 控制精度:6 μrad;
4) 工作頻率:0~120 Hz。
通光口徑決定快擺鏡鏡面大小,轉動范圍決定放大機構放大后位移大小,控制精度決定壓電驅動器應選用的輸出分辨率。
柔性機構具有無摩擦、無磨損等特點,因此,選用柔性機構來支撐鏡面可以解決運動部件之間高頻、小位移的相對運動,克服了傳統運動部件的缺點,使快擺鏡具有精度及諧振頻率更高的優點。本文設計的快擺鏡將柔性鉸鏈放大機構通過螺釘固定在底座上,在壓電疊堆和預緊螺釘之間放置金屬墊片防止損壞疊堆。當在壓電疊堆兩端施加電壓使其伸長時,位移傳遞至放大機構放大后,通過柔性軸承把位移傳遞到反射鏡,以此來實現反射鏡的偏轉。快擺鏡結構如圖2所示。
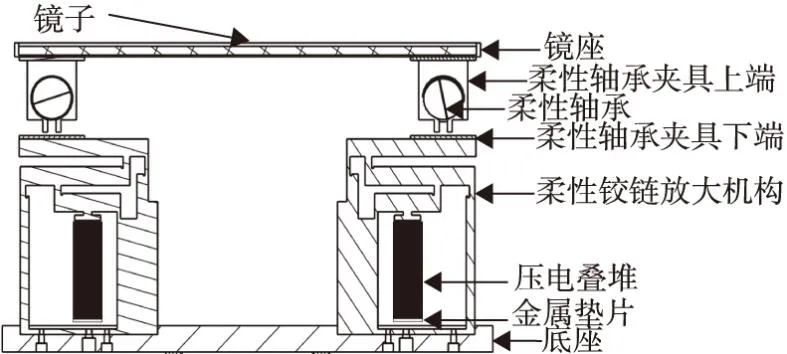
圖2 快擺鏡結構示意圖
1.2 作動器的選擇
調查快擺鏡研究現狀發現,如今用來驅動快擺鏡的微位移機構以壓電陶瓷作動器和音圈電機作動器為主。
壓電陶瓷作動器是利用壓電陶瓷逆壓電效應,即在壓電陶瓷兩端施加一定的電壓時,壓電陶瓷可以伸長,壓電陶瓷的輸出力與陶瓷片面積相關,輸出位移與壓電陶瓷層數相關。音圈電機是利用了洛倫茲力原理制造出的電機,其工作原理是通過改變線圈中電流的大小和方向來控制線圈體在磁場作用下的運動。跟音圈電機相比[13],使用壓電陶瓷作動器可使快擺鏡的結構更緊湊,設計靈活,且壓電作動器的頻率響應更快,能推動更高的負載,幾乎不受電磁干擾的影響。
本設計選用的壓電陶瓷作動器基本參數如表1所示。為了實現更大的位移輸出,使之滿足快擺鏡的轉動范圍,將兩個方形壓電疊堆粘在一起使用,在結構上串聯,在電路上并聯。
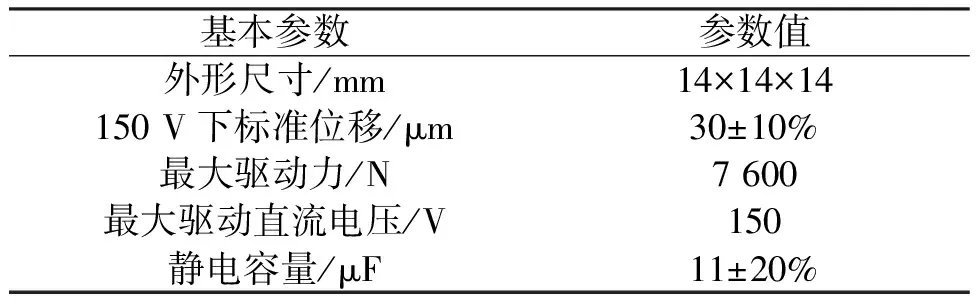
表1 壓電作動器基本參數
1.3 柔性鉸鏈放大機構的設計
壓電陶瓷作動器是利用壓電陶瓷的逆壓電效應實現位移輸出的裝置,其具有精度高,響應速度快,輸出作用力大等優點[14]。如圖3所示,為了獲取較大的變形量,壓電作動器采取疊層片式結構,將壓電陶瓷片采用機械上串聯、電學上并聯的方式組成疊堆式壓電陶瓷。但僅通過壓電作動器無法滿足大口徑快擺鏡偏轉范圍的要求,所以需要設計一種機構來放大壓電作動器的位移。杠桿式的微位移放大機構的結構相對簡單,且放大倍數可通過調節杠桿長度改變。因此,本文設計了一種三級杠桿式的放大機構,其工作原理如圖4所示。由圖4可見,A點為壓電作動器輸出點,B點為一級杠桿放大部分的支點,C點為一級杠桿放大部分的輸出點,D點為二級杠桿放大部分的支點,E點為二級杠桿放大部分的輸出點,F點為三級杠桿放大部分的支點,G點為三級杠桿放大部分的輸出點,即為最后放大部分的輸出點。
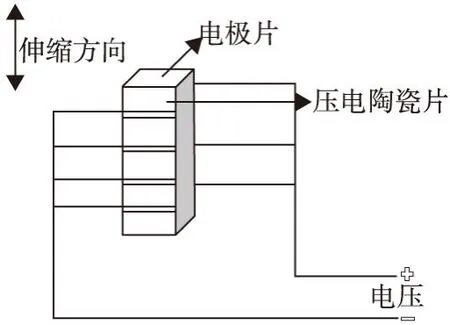
圖3 疊堆式壓電陶瓷結構示意圖
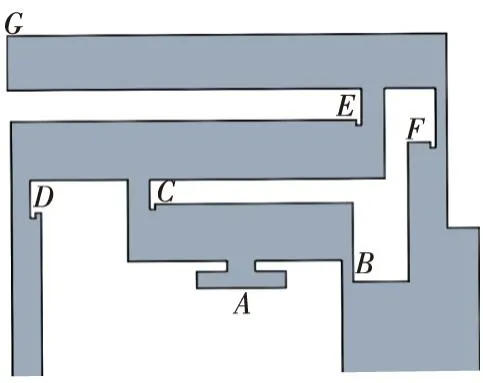
圖4 三級杠桿式柔性鉸鏈放大機構
根據圖5所示的結構尺寸,考慮到快擺鏡可能應用在極低溫環境,為防止放大機構的變形,選用鈦合金材料加工放大機構。對柔性鉸鏈放大機構做有限元的靜力學仿真來驗證放大倍數,在A點處以10 μm間隔施加10~50 μm向上的位移輸出,得到放大機構的仿真結果如圖6所示。有限元仿真的計算結果如圖7所示。同時為驗證柔性鉸鏈能否在低溫下使用,施加溫度場后仿真的計算結果表2所示。由表2可見,設計得到的三級杠桿式柔性鉸鏈放大機構位移可放大約6.5倍,這為大口徑快擺鏡的角度偏轉提供了保障。
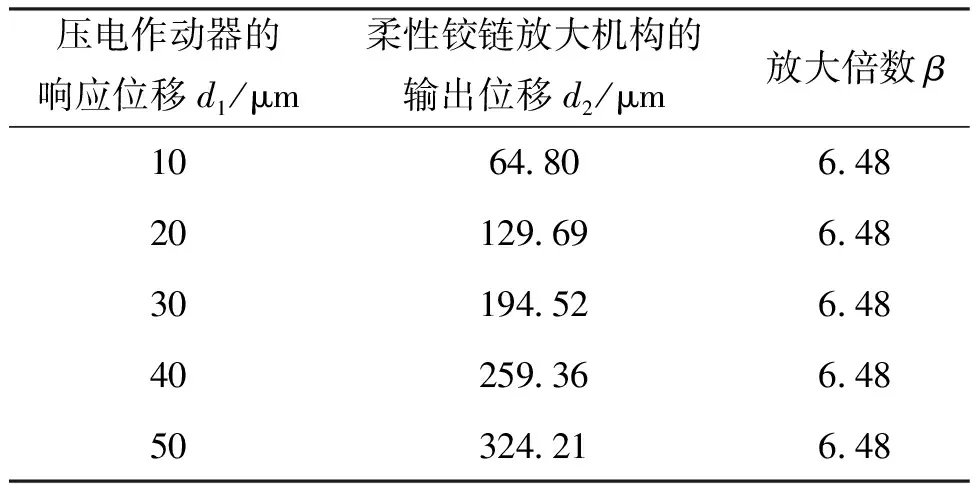
表2 有限元分析結果
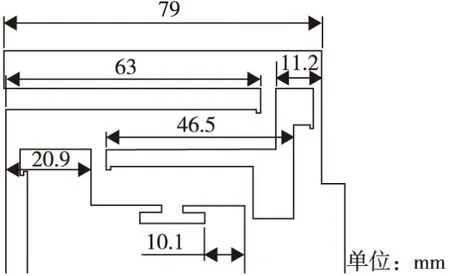
圖5 柔性鉸鏈放大機構尺寸圖
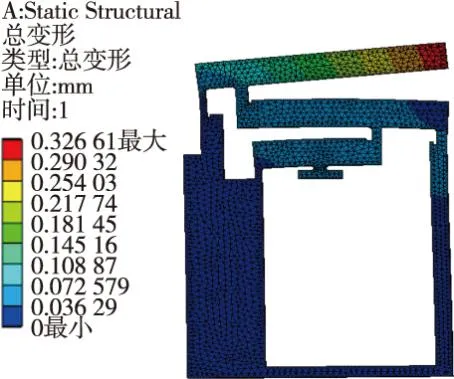
圖6 柔性鉸鏈放大機構變形圖

圖7 柔性鉸鏈放大機構等效應力圖
1.4 電阻式應變片傳感器設計
由于壓電作動器具有遲滯特性和蠕變特性[15],在精密驅動與控制領域中,因電阻式應變片具有響應快、價格低及結構簡單等特點,常使用其作為閉環控制的反饋傳感器。由于壓電驅動器的位移不是直接作用在快擺鏡上,而是通過柔性鉸鏈放大機構進行放大,所以將電阻應變片粘貼在壓電作動器表面不能實現閉環控制,而需要將應變片粘貼在放大機構上。對于放大機構,輸出端在G點,第三級支點F處的位移量也較大,且有足夠空間粘貼應變片來進行反饋。應變片粘貼位置如圖8所示。結合放大機構尺寸和使用需求,選用廣測電子有限公司BF-H120-3AA-D300型號的應變片。
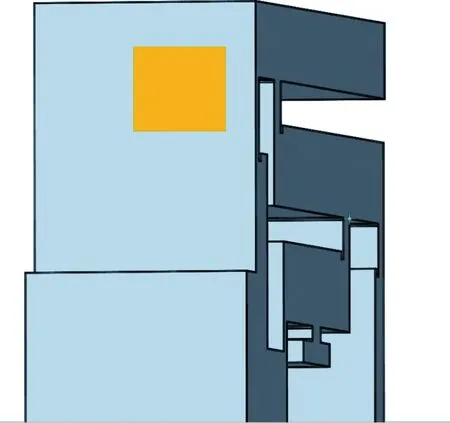
圖8 電阻應變片粘貼位置示意圖
1.5 柔性支撐頂結構設計
在精密驅動與控制研究領域中,由于傳統的接觸副元件無法滿足高精度的傳動,而柔性原件具有精度高、摩擦小等優點,故現多采用柔性元件作為微位移輸出機構運動關節。
采用柔性鉸鏈作為運動關節可以解決快擺鏡機構高頻的微小位移運動。經過廣泛調研,選用一種單回轉自由度的柔性鉸鏈,它的回轉維度是中間固定,兩端可以沿著圓柱方向轉動。與傳統割槽的柔性鉸鏈結構相比,它的剛度相對較好,但是這種柔性軸承的加工工藝復雜,對材料要求較高。目前已經克服了這種柔性軸承的加工問題,此類型產品如圖9所示。傳統切口型的柔性鉸鏈行程較小,且壽命較短,而柔性軸承通過轉動的形式進行了優化。本設計采用兩端夾持柔性軸承的方法(見圖10)將柔性軸承作為運動關節固定在快擺鏡鏡座與放大機構之間,保障了快擺鏡的響應速度和運動精度。

圖9 柔性軸承
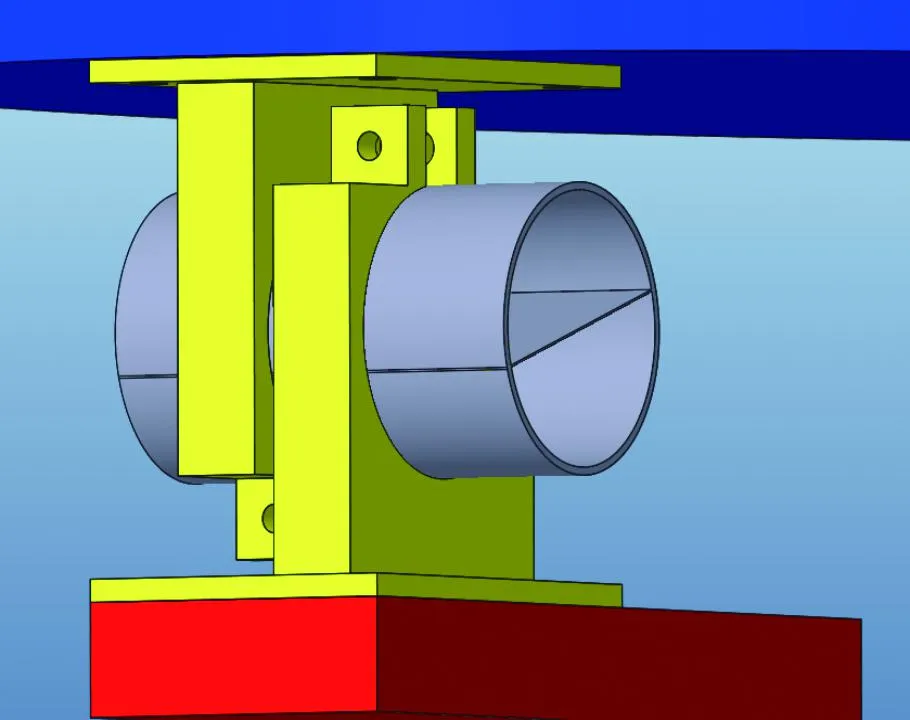
圖10 運動關節處柔性軸承夾具示意圖
2 模態仿真
對設計的基于柔性鉸鏈的大口徑快擺鏡進行模態分析,進而對設計的快擺鏡結構進行驗證。在進行有限元分析前,對快擺鏡的模型進行簡化,將運動關節處的柔性軸承定義為轉動副,采用ANSYS Workbench對快擺鏡整體進行網格劃分,設置好快擺鏡各個部件及鏡子的材料參數,定義底座上的螺孔為固定支撐后,開始進行有限元仿真。
表3為快擺鏡選用的結構材料。常用鏡體材料中,鈹的密度最小,只有微晶玻璃的3/4;且材料比剛度最大,約為其他材料的4~6倍,選用鈹鏡可以減小鏡體質量,降低轉動慣量。本設計中反射鏡形狀為橢圓形,尺寸為280 mm×186 mm,厚度為5 mm。
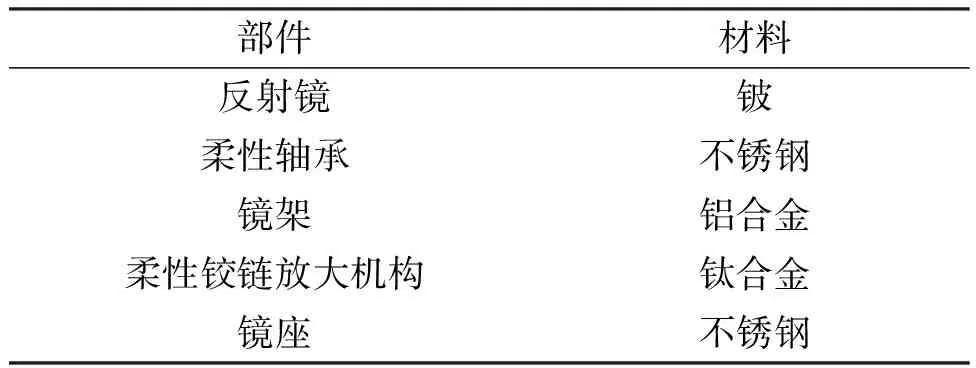
表3 快擺鏡各個部件材料選擇
通過有限元分析得到快擺鏡的特征頻率和特征振型,圖11為快擺鏡的前6階振型圖。表4為快擺鏡前6階特征頻率。由圖11可見,快擺鏡機構的振型是關于平行于鏡面的機械軸對稱的,這主要是因為鏡面的機械軸是對稱布局。第四階振型為本研究重點關注的重點擺動振型,由于諧振頻率為394.36 Hz,超出了快擺鏡設計的工作頻率范圍,理論上在快擺鏡工作頻率范圍內不會發生諧振。

表4 快擺鏡前6階特征頻率

圖11 快擺鏡前6階振型
3 實驗與分析
3.1 工作原理及偏轉角度分析
本文設計的快擺鏡工作原理:由于壓電作動器只能通過施加在兩端的電壓進行伸長而不能收縮,因此,在驅動快擺鏡工作時,首先施加驅動電壓讓兩個壓電作動器同時上升25 μm,使快擺鏡鏡面水平上升,增大其中一個壓電作動器兩端電壓,使其再上升0~25 μm,而對另一個壓電作動器,通過減小其兩端的電壓使其下降0~25 μm,由此實現了快擺鏡的偏轉運動。
在驅動電壓作用下,其中一個壓電陶瓷的輸出位移為X1,另一個壓電陶瓷輸出位移為X2,所設計快擺鏡為差分驅動工作方式,壓電陶瓷的實際輸出位移為X2-X1。考慮到使用柔性軸承作為快擺鏡的運動關節,其對放大機構的輸出位移影響可以忽略。因此,經過柔性鉸鏈放大機構放大后作用在快擺鏡鏡座上的輸出位移可表示為
ΔL≈β(X2-X1)
(1)
式中β為柔性鉸鏈放大機構的放大倍數。
快擺鏡的偏轉角度可表示為
Δθ≈ΔL/(a/2)
(2)
式中a為鏡子的長軸長度。
3.2 實驗驗證
為了驗證其工作原理和快擺鏡角度偏轉結果,設計了大口徑快擺鏡性能及其測試系統,如圖12所示。
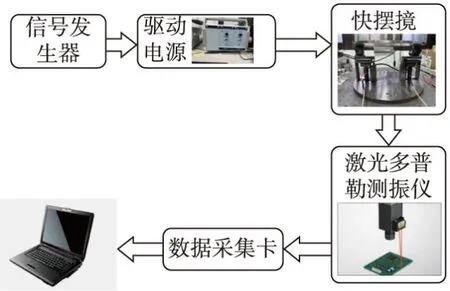
圖12 測試平臺系統框圖
測試系統由信號發生器、壓電作動器驅動電源、快擺鏡、紅外激光多普勒測振儀、數據采集卡和PC機組成。測試系統中的紅外激光多普勒測振儀選用木木西里生產的傳感器(KV-HB4525S),其測量精度為1.28 nm,量程為18 mm,采樣頻率為78.125 kHz。數據采集卡選用北京阿爾泰科技發展有限公司的8通道數據采集卡(USB3100),其采集頻率可達20 kHz,搭建的測試平臺如圖13所示。
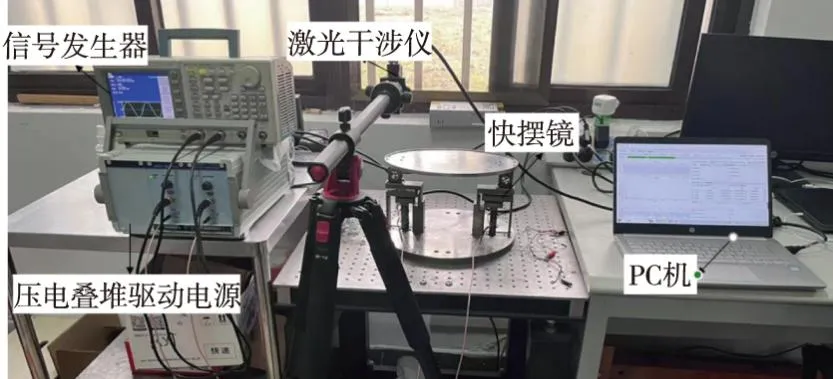
圖13 測試平臺系統實物圖
信號發生器產生的驅動信號經過壓電作動器驅動電源放大后,快擺鏡中的壓電作動器產生相應響應,通過柔性鉸鏈放大機構將壓電作動器產生的位移放大后傳遞到快擺鏡的鏡座上,引起快擺鏡的角度偏轉。通過紅外激光多普勒測振儀測量快擺鏡鏡面上距離旋轉軸線一定距離處的沿垂直方向的位移,可計算出快擺鏡的實際偏轉角。通過壓電作動器驅動電源施加不同電壓,首先從電壓0開始,并以間隔10 V遞增到150 V,之后從150 V遞減到0,得到電壓與偏轉角的關系如圖14所示。由圖可見,快擺鏡的偏轉角隨著驅動電壓的升降而變化的正、反向曲線是非線性,這是由壓電作動器的遲滯效應引起的,通過預反饋控制或閉環控制可進行修正。
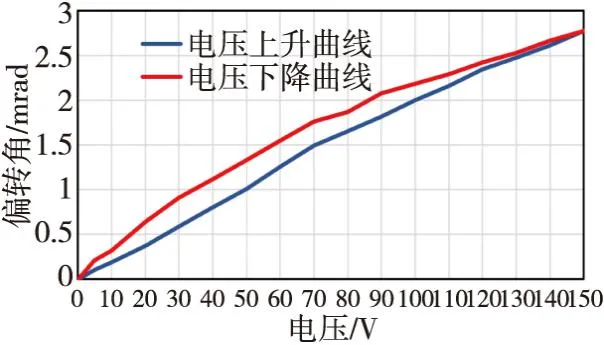
圖14 電壓-偏轉角關系圖
4 結束語
本文提出了一種大口徑單軸偏轉的壓電快擺鏡,研究其工作原理。針對大口徑鏡面導致快擺鏡偏轉角度范圍較小的問題,設計了一款三級杠桿式的輸出位移柔性鉸鏈放大機構。采用柔性軸承作為運動關節提高了快擺鏡的響應速度,分析了快擺鏡的最大偏轉角度、最大應變以及基本頻率和振型。通過實驗對設計出的快擺鏡進行驗證,結果表明,基于柔性鉸鏈結構的壓電快擺鏡可以實現超過2 mrad的角度偏轉,最大應力集中在放大機構的柔性鉸鏈處為300 MPa。結構性能指標滿足設計要求,但是壓電作動器固有的遲滯效應和非線性的缺點較明顯,需進一步研究并加以改善。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
