基于YOLOv5 的太陽(yáng)能電池片EL 圖像缺陷檢測(cè)算法
2024-04-01 06:41:22張德鈺
電視技術(shù) 2024年1期
張德鈺
(福州大學(xué) 先進(jìn)制造學(xué)院,福建 泉州 362251)
0 引言
在我國(guó)將光伏產(chǎn)業(yè)列為戰(zhàn)略性新興產(chǎn)業(yè)后,光伏產(chǎn)業(yè)實(shí)現(xiàn)了快速發(fā)展,如今已經(jīng)成為我國(guó)為數(shù)不多參與國(guó)際競(jìng)爭(zhēng)并取得領(lǐng)先優(yōu)勢(shì)的產(chǎn)業(yè)[1]。光伏組件通常需要暴露在惡劣的自然條件下,長(zhǎng)期的工作容易使多晶硅光伏電池受到嚴(yán)重的破損,如隱裂、指狀裂紋、黑斑等,這些問題還會(huì)引起高溫導(dǎo)致大面積的光伏電路損壞嚴(yán)重,甚至引發(fā)火災(zāi)[2]。光伏EL 圖像檢測(cè)是一種用于太陽(yáng)能電池質(zhì)量檢測(cè)的方法。EL 圖像提供了光伏電池內(nèi)部電學(xué)圖像,有助于深入了解光伏電池內(nèi)部電學(xué)特性和結(jié)構(gòu),為識(shí)別和評(píng)估電池性能問題提供了關(guān)鍵線索[3]。通過分析EL 圖像,能夠檢測(cè)出電池中的缺陷、短路及其他不良現(xiàn)象。及時(shí)使用EL 圖像檢測(cè)缺陷進(jìn)行修復(fù)措施或者替換光伏組件,對(duì)于提高光伏電池的效率、故障率及使用壽命至關(guān)重要。
目前,用于目標(biāo)檢測(cè)的主流網(wǎng)絡(luò)有一階段的SSD[4]、YOLO,以及二階段的RCNN、Faster R-CNN等。二階段網(wǎng)絡(luò)雖然比一階段網(wǎng)絡(luò)的檢測(cè)精度更高,但是由于其速度慢且需要占用大量?jī)?nèi)存、大量計(jì)算資源的特點(diǎn),在工業(yè)檢測(cè)中不占優(yōu)勢(shì)。而SSD 網(wǎng)絡(luò)利用多尺度特征圖檢測(cè)不同大小的目標(biāo),在檢測(cè)小目標(biāo)時(shí)往往因特征映射小容易造成信息丟失。
基于此,研究提出一種基于改進(jìn)YOLOv5 的EL圖像缺陷檢測(cè)算法,采用混合域的方式融合雙層的通道注意力及雙層的空間注意力對(duì)相似背景進(jìn)行抑制,使用特征融合(Feature Fusion Module,F(xiàn)FM)模塊將特征融合,使模型在低配置的硬件設(shè)備基礎(chǔ)上具備強(qiáng)大的實(shí)時(shí)檢測(cè)能力[5]。
1 基于YOLOv5 的EL 圖像缺陷檢測(cè)模型
1.1 YOLOv5 概述
YOLOv5 作為一階段網(wǎng)絡(luò),在網(wǎng)絡(luò)架構(gòu)相同的情況下具有4 種不同版本,分別為YOLOv5s、YOLOv5m、YOLOv5l 和YOLOv5x。YOLOv5s 具有最小的深度和寬度參數(shù),對(duì)硬件的要求也最低。YOLOv5 網(wǎng)絡(luò)結(jié)構(gòu)可以分為3 個(gè)部分:Backbone、Neck、Head。在Backbone 中,F(xiàn)ocus 模塊運(yùn)用切片運(yùn)算對(duì)檢測(cè)圖片進(jìn)行特征映射,通過卷積后進(jìn)入CSP 模塊。幾組卷積和CSP 模塊經(jīng)過一個(gè)SPP 模塊,SPP 模塊的主要作用是獲得不同尺度的特征而增加網(wǎng)絡(luò)的感受野。在Neck 部分,主要由特征金字塔網(wǎng)絡(luò)和路徑聚合網(wǎng)絡(luò)組成[6]。
1.2 數(shù)據(jù)增強(qiáng)
使用數(shù)據(jù)增強(qiáng)增加不同缺陷的樣本量可以提高整體檢測(cè)的精度和實(shí)驗(yàn)的可靠性,防止過擬合的情況發(fā)生。本研究針對(duì)PVEL-AD 中的各類缺陷,采用Cutmix 數(shù)據(jù)增強(qiáng)、翻轉(zhuǎn)法對(duì)EL 圖像進(jìn)行處理[7-8]。Cutmix 在像素基礎(chǔ)上整合兩個(gè)圖像樣本,對(duì)于一個(gè)圖像隨機(jī)選取一個(gè)區(qū)域,使用另一圖像填充對(duì)應(yīng)區(qū)域,從而得到一個(gè)新的圖片。這種對(duì)圖片使用drop 命令的做法并不會(huì)改變label,也不會(huì)改變整個(gè)數(shù)據(jù)集的分布。
1.3 改進(jìn)的YOLOv5 模型
改進(jìn)的YOLOv5 模型如圖1 所示,在經(jīng)過輸入端的數(shù)據(jù)增強(qiáng)后將Backbone 中的第1 個(gè)和最后1個(gè)C3 模塊替換為背景抑制模塊。背景抑制模塊由4 個(gè)并行通道組成,分別為2 個(gè)空間注意模塊和2個(gè)通道注意模塊。空間注意模塊使得模型有效抑制干擾,而通道注意模塊利用每個(gè)通道的全局空間信息調(diào)整各通道內(nèi)的特征響應(yīng),使模型能夠在不影響效率的情況下更有效地抑制無(wú)關(guān)背景干擾,達(dá)到良好的精準(zhǔn)度。

圖1 改進(jìn)后的YOLOv5 模型結(jié)構(gòu)
1.4 基于混合域的背景抑制模塊
1.4.1 模型概述
受檢測(cè)的EL 圖像在通過深度卷積神經(jīng)網(wǎng)絡(luò)進(jìn)行特征提取時(shí),由于冗余背景的干擾,使背景產(chǎn)生與目標(biāo)類似的特征響應(yīng),進(jìn)而導(dǎo)致目標(biāo)識(shí)別和定位的準(zhǔn)確性受到影響。研究通過全局特征與目標(biāo)特征之間的聯(lián)系,加強(qiáng)不同目標(biāo)之間與相似背景的邊緣特征,提出抑制冗余模糊背景的背景抑制模型,以增強(qiáng)網(wǎng)絡(luò)的表征能力,進(jìn)而提高網(wǎng)絡(luò)對(duì)EL 圖像缺陷檢測(cè)的精度。對(duì)于一張給定的輸入特征圖,背景抑制模塊會(huì)對(duì)其進(jìn)行并行的特征計(jì)算,同時(shí)削弱無(wú)關(guān)背景的干擾,再使用一個(gè)特征融合模塊整合有效的特征圖信息,從而發(fā)揮特征增強(qiáng)的功能。
1.4.2 空間注意力模塊
在特征圖中,不同位置的像素差異可以在空間維度上體現(xiàn),通過在空間層面比較每個(gè)區(qū)域位置的權(quán)重,能夠較好地識(shí)別具有意義的圖像特征。空間注意模塊框架,如圖2 所示。給定一張輸入特征圖,在通過一個(gè)卷積層后分成2 個(gè)不同通道壓縮的特征圖S1和S2。

圖2 空間注意模塊框架圖
為求得S1、S2的共同特征,排除冗余背景的干擾,研究使用交叉的操作加強(qiáng)相同特征,減弱不同特征。相同特征加強(qiáng)后的特征圖Y1和不同特征減弱后的特征圖Y2為
然后用全局平均池化操作整合空間信息,在沿著通道維度進(jìn)行拼接后引入一個(gè)共享的FFM 模塊,將來(lái)自空間維度的特征與其他通道上的特征進(jìn)行融合,具體流程如下。使用向量拼接將空間及上下其他維度支路的特征融合后得到特征圖Z,對(duì)其進(jìn)行全局平局池化后得到向量1×1×C。對(duì)特征圖Z進(jìn)行重新加權(quán)得到特征圖Z0,類似于SENet 中的通道權(quán)重相乘[9]。圖3 為FFM 的結(jié)構(gòu)圖。
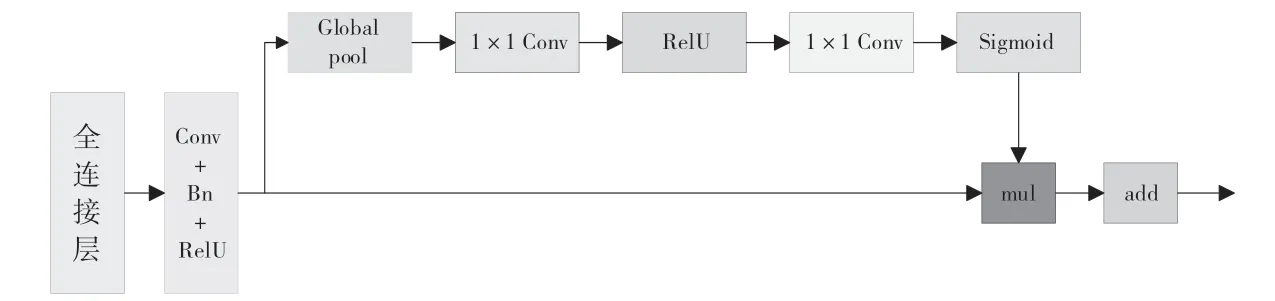
圖3 FFM 模塊結(jié)構(gòu)圖
FFM 模型計(jì)算公式為
式中:n為樣本特征的數(shù)量,Xi為第i個(gè)特征值,ω0為參數(shù)模型。在忽略常數(shù)項(xiàng)及一次項(xiàng)后,模型方程可化簡(jiǎn)為
式中:j為特征,fi、fj分別為第i個(gè)特征和第j個(gè)特征所屬的域。
1.4.3 加強(qiáng)空間維度背景抑制
由于EL 圖像具有相似性,在空間模塊中加入一個(gè)與無(wú)缺陷的EL 特征圖進(jìn)行比對(duì)的空間背景抑制模塊,可以忽略與無(wú)缺陷EL 圖像一致的信息,將權(quán)重分布在更感興趣的區(qū)域,具體操作如圖4所示。

圖4 空間維度的背景抑制加強(qiáng)模塊
基本流程與之前空間注意模塊相同,舍棄分割成兩部分的輸入特征圖中的一部分,用一張無(wú)缺陷EL 特征圖替代。在背景抑制步驟中,由于使用的是無(wú)缺陷的特征圖,需要抑制相同的特征,加強(qiáng)不同的特征,并與空間注意模塊一致,進(jìn)行全局平均池化和拼接后,由FFM 模塊融合信息。在此操作后,可減少網(wǎng)絡(luò)計(jì)算復(fù)雜度,加強(qiáng)排除冗余背景的能力,提高網(wǎng)絡(luò)精準(zhǔn)度。
1.4.4 加強(qiáng)通道維度背景抑制
加強(qiáng)通道維度背景抑制的基本流程與加強(qiáng)空間維度背景抑制模塊相同,如圖5 所示。將一半的輸入特征圖替換成無(wú)缺陷EL 特征圖,經(jīng)過卷積后進(jìn)行不同特征加強(qiáng)、相同特征減弱的交叉操作。將背景抑制后的特征圖進(jìn)行全局平均池化、卷積、拼接后輸入FFM 模塊。
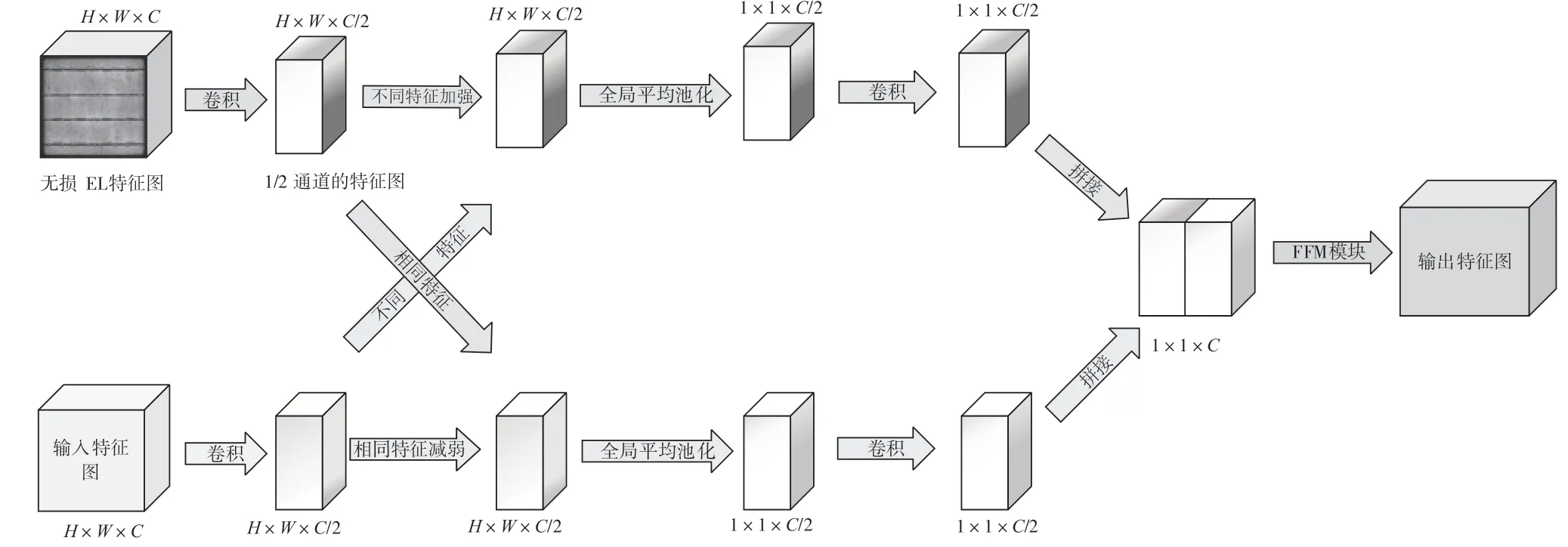
圖5 通道維度的背景抑制加強(qiáng)模塊
1.4.5 融合方式
整個(gè)模塊共使用2個(gè)不同維度的4個(gè)并行通道,并使用并聯(lián)的方式通過FFM 模塊聯(lián)結(jié)在一起。在整個(gè)模塊中,4 個(gè)并行通道具有各自不同的功能,因此使用FFM 特征融合模塊時(shí)不會(huì)影響整體的性能。整體聯(lián)結(jié)方式如圖6 所示。
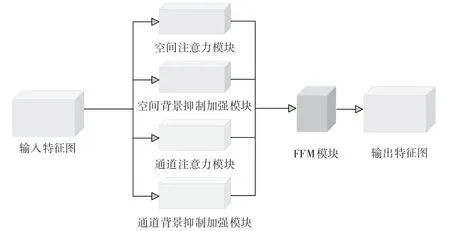
圖6 整體聯(lián)結(jié)方式
2 實(shí)驗(yàn)過程分析
2.1 數(shù)據(jù)集
PVEL-AD 是由河北工業(yè)大學(xué)、北京航空航天大學(xué)聯(lián)合發(fā)布的數(shù)據(jù)集,又稱為EL2021 數(shù)據(jù)集,用于光伏電池異常缺陷檢測(cè)基準(zhǔn)測(cè)試。PVEL-AD 共有36 543 張近紅外圖像,包含各種內(nèi)部缺陷和異構(gòu)背景,包括1 類無(wú)異常圖像和12 個(gè)不同類別的異常缺陷圖像,如裂紋、指狀裂紋、星狀裂紋、斷柵、黑斑、未對(duì)準(zhǔn)、粗線、劃痕、碎片、斷角以及材料缺陷。研究選取3 500 張EL 圖像作為訓(xùn)練集,1 000 張PVELAD 作為測(cè)試集。其中,黑斑類型1 011 張、星狀裂紋類型969張、指狀裂紋類型1 999張、裂紋類型123張、粗線類型775 張、水平斷錯(cuò)類型266 張,共6 種類型4 500 張EL 圖像(部分圖像含多種缺陷類型)。
2.2 參數(shù)設(shè)置
實(shí)驗(yàn)均在Windows 10 操作系統(tǒng)下進(jìn)行,NVIDIA GeForce 3080 顯卡為12 GB,Python 版本為3.9,采用PyTorch 2.0 框架。實(shí)驗(yàn)設(shè)定基本參數(shù)為batchsize=16、momentum=0.9、weightdecay=0.001、epoch=300,初始學(xué)習(xí)率為0.000 1,輸入圖像大小為1 024×1 024。
2.3 評(píng)價(jià)指標(biāo)
本研究采用mAP 作為性能評(píng)價(jià)指標(biāo),計(jì)算準(zhǔn)確率、召回率、EL 缺陷檢測(cè)平均準(zhǔn)確率、所有EL圖片類別的缺陷檢測(cè)準(zhǔn)確率平均值,分別為
式中:P為準(zhǔn)確率,TP為預(yù)測(cè)對(duì)的正例,F(xiàn)P為預(yù)測(cè)錯(cuò)的正例。
式中:R為召回率,F(xiàn)N為預(yù)測(cè)錯(cuò)的負(fù)例。
式中:AP為EL 缺陷檢測(cè)平均準(zhǔn)確率。
式中:Map為所有EL 圖片類別的缺陷檢測(cè)準(zhǔn)確率平均值,N為圖片類別數(shù)量。
2.4 實(shí)驗(yàn)結(jié)果及分析
除了與原YOLOv5 網(wǎng)絡(luò)模型對(duì)比,為了進(jìn)一步驗(yàn)證本研究提出的優(yōu)化算法性能,將改進(jìn)的YOLOv5s 與Faster R-CNN、EfficientDet、SSD 模型進(jìn)行比對(duì),并分析其結(jié)果。實(shí)驗(yàn)結(jié)果如表1 所示。
從實(shí)驗(yàn)結(jié)果可以看出,在參數(shù)量減少的情況下,改進(jìn)的YOLOv5s 網(wǎng)絡(luò)的mAP50 值高于EfficientDet、Faster R-CNN 以及原始YOLOv5 系列網(wǎng)絡(luò),大多數(shù)缺陷類別識(shí)別精度也高于其他網(wǎng)絡(luò)。究其原因主要是EL 圖像具有大量非均勻的復(fù)雜紋理特征,而使用背景抑制模型替換原有網(wǎng)絡(luò)的第1 個(gè)和第4 個(gè)C3部分后,能夠有效抑制模糊背景的影響,抑制復(fù)雜背景對(duì)各缺陷特征的干擾,多尺度識(shí)別有效特征,提高了模型對(duì)缺陷和背景的辨識(shí)度,從而很好地提升了算法檢測(cè)性能。原始YOLOv5 與使用背景抑制模型后的YOLOv5s 檢測(cè)結(jié)果分別如圖7 和圖8 所示。

圖7 YOLOv5 檢測(cè)結(jié)果
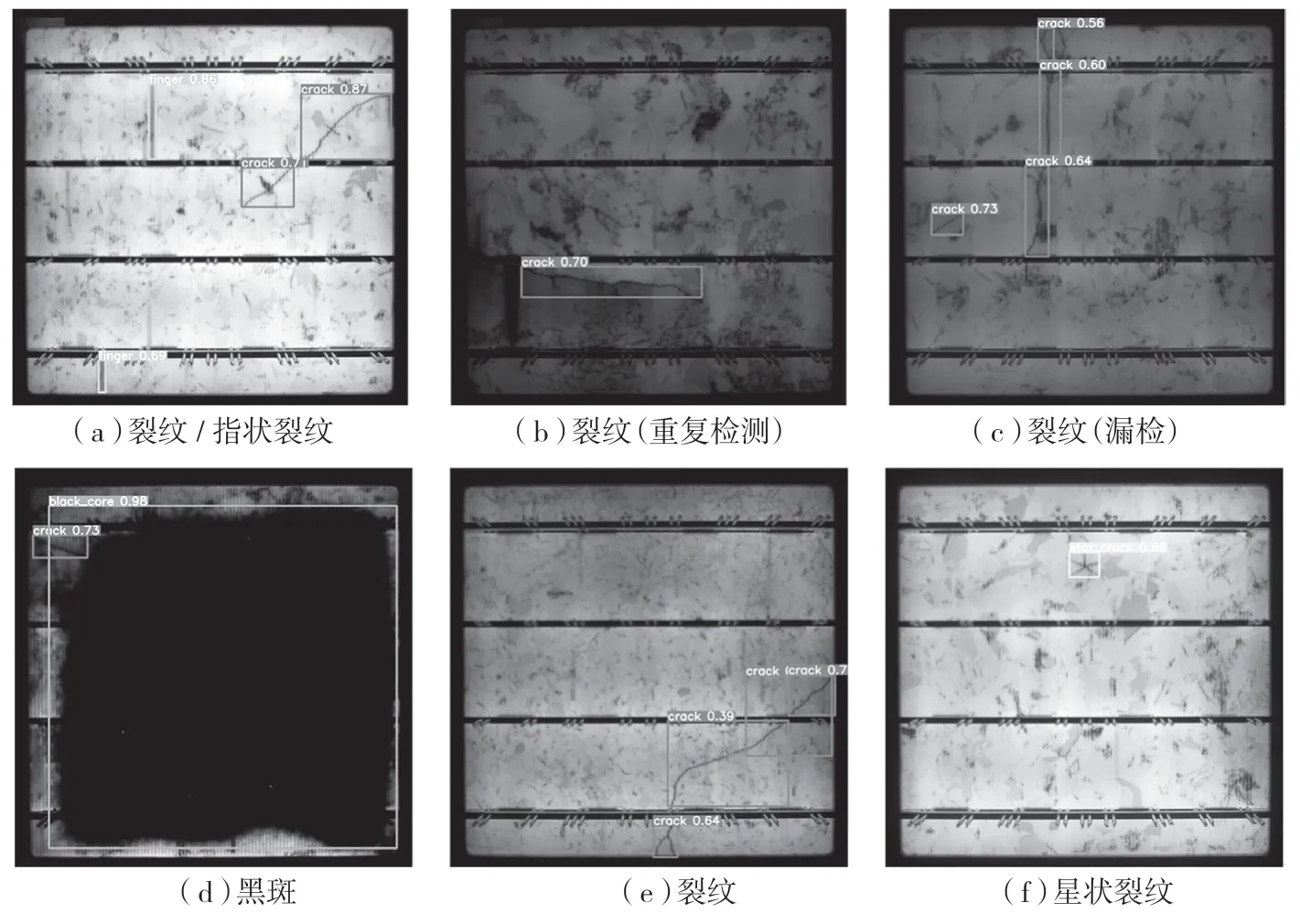
圖8 改進(jìn)后的檢測(cè)結(jié)果
3 結(jié)語(yǔ)
為提高太陽(yáng)電池EL 圖像缺陷檢測(cè)的準(zhǔn)確度和可靠性,提出一種基于改進(jìn)YOLOv5 框架的EL 圖像缺陷多分類檢測(cè)方法,運(yùn)用數(shù)據(jù)增強(qiáng)和背景抑制模塊,使模型可以很好地對(duì)EL 圖像缺陷進(jìn)行檢測(cè)和分類。實(shí)驗(yàn)結(jié)果表明:相比于原始YOLOv5s模型,改進(jìn)后的模型參數(shù)量從7.02×106下降到6.79×106;針對(duì)背景復(fù)雜的EL 圖像缺陷,識(shí)別精準(zhǔn)度有小幅提升,mAP50 從77.89 提升到87.74。下一階段的目標(biāo)是將模型轉(zhuǎn)移到邊緣設(shè)備中,并對(duì)系統(tǒng)進(jìn)行測(cè)試,使其能夠?qū)崟r(shí)檢測(cè)EL 圖像缺陷。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
貴州師范學(xué)院學(xué)報(bào)(2016年4期)2016-12-01 03:54:07
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12