基于虛幻引擎的紅外成像激光對抗模擬系統
2024-04-03 12:09:00何衡湘賈榮華李玲慧
激光技術 2024年1期
鐘 強,何衡湘,唐 鈺,賈榮華,李玲慧
(西南技術物理研究所,成都 610041,中國)
0 引 言
紅外成像由于其全天候工作特性,廣泛應用于光電偵察與精確制導領域[1-2]。隨著激光技術的發展,激光定向壓制干擾逐漸成為紅外成像系統的主要對抗手段[3]。紅外成像探測器在受到激光干擾時,會在圖像中形成形狀各異的高亮度光斑,使得成像系統無法正常識別與捕獲目標。在模擬其激光干擾效果時,通常可采用數字仿真的方法[4-8]。目前的仿真大多基于干擾功率的調整,只能得到激光干擾光斑的面積大小對比,未加入場景模擬,無法映射光斑面積與干擾距離、成像視場等的關系。在紅外場景仿真方面,主要是以視景仿真軟件為主,開展目標與場景的紅外成像模擬[9-12],其視景范圍較小,且在場景渲染效果上不夠真實。
虛幻引擎最早作為游戲開發引擎而面世,是一款高效、全能的實時渲染引擎,獨有的藍圖可視化腳本系統能極大地提高開發效率,加上其強大的模型與場景編輯、渲染功能,可用于紅外成像干擾方面的仿真與模擬。本文作者利用虛幻引擎構建紅外成像激光對抗模擬系統,將激光干擾效果可視化、場景化,實現高逼真度的紅外成像激光對抗模擬。
1 紅外成像模擬
1.1 場景設置
在虛幻引擎中導入場景、激光干擾源及紅外成像系統的模型,利用虛幻引擎的地形編輯功能,構建出對抗場景。虛幻引擎默認場景單位為cm,本系統場景尺寸大小600000 cm×600000 cm。虛幻引擎默認坐標軸系為(x,y,z),為絕對坐標系。x軸正方向為前方,圍繞x軸旋轉為滾動;y軸正方向為右方,圍繞y軸旋轉為俯仰;z軸正方向為上方,圍繞z軸旋轉為偏轉,下同。將場景位置坐標設置為(0 cm,0 cm,0 cm),此時場景邊緣在x方向、y方向最小值為-300000 cm,最大值為300000 cm。場景整體選取為山區,有較少植被覆蓋。由于地形高低起伏不規則,且有低洼處,場景設置位置坐標后在z方向最小值為-3800 cm,最大值為24070 cm。場景中繪制彎曲環繞的公路,公路紋理材質設置為柏油路。干擾源模型為輪式車輛,靜止放置于坐標點(19872 cm,17078 cm,2454 cm),天氣設定為無云且有較強光照,最終得到場景效果圖見圖1。

圖1 場景效果圖Fig.1 Rendering of the scene
1.2 紅外成像模擬
自然界任一溫度高于絕對零度的物體時刻都在向外界輻射熱能,且輻射能的強弱與物體的表面材料屬性以及溫度都有直接的關系[13]。在紅外成像場景中,不同物體或同一物體的不同部位所表現出的紅外特征都存在差異[14]。在虛幻引擎中,通過設置冷熱成像的底色與表色,利用場景深度與物體的自定義深度進行比較,實現物體與場景的紅外成像。可以通過以下步驟實現紅外成像的模擬:(a)創建紅外成像材質、材質實例以及紅外成像用戶界面,將紅外成像材質實例拖入到紅外成像用戶界面中;(b)添加控件組件,將其選擇為創建好的紅外成像用戶界面;(c)創建紅外成像渲染材質,將材質域設置為“后期處理”,編輯紅外成像渲染材質藍圖,創建紅外成像渲染材質實例,紅外成像渲染材質實現原理見圖2;(d)紅外成像系統藍圖中添加“場景捕獲組件2D”,將紋理目標設置為成像紋理,后期處理材質中添加熱成像渲染實例。

圖2 紅外成像渲染材質實現原理Fig.2 Implementation principle of infrared imaging rendering materials
接下來設置干擾源及紅外成像系統參數。設定紅外成像系統視場為8°,分辨率為640×480,在場景中的初始位置為(50052 cm,-37695 cm,34193 cm)。調節紅外成像系統指向信息為(2.88°,-25.85°,119.2°),虛幻引擎默認指向軸系為(滾動,俯仰,偏轉),下同。干擾源位置不變,坐標保持(19872 cm,17078 cm,2454 cm),將其輪胎及發動機艙等部位模型的自定義深度通道勾選,模擬熱成像,運行系統,得到紅外成像效果圖,如圖3所示。

圖3 紅外成像效果圖Fig.3 Rendering of infrared imaging
2 激光干擾模型構建
激光對紅外成像系統干擾的機理實質上是利用激光能量來輻照紅外成像系統的探測器,在圖像上形成形狀各異的飽和亮斑[15]。亮斑的大小與到達探測器靶面的激光功率密度以及探測器單像元飽和時的激光功率密度有關[16-17]。激光傳輸示意圖如圖4所示。
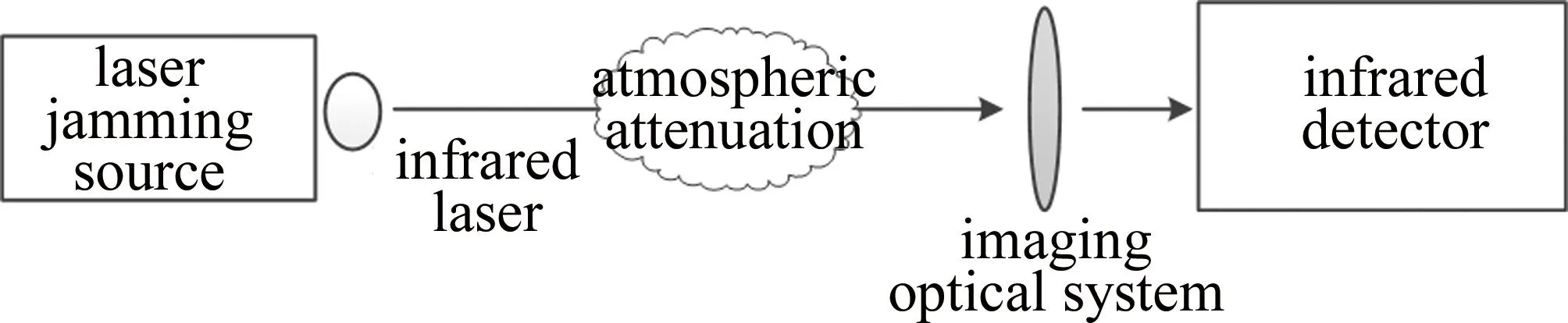
圖4 激光傳輸示意圖Fig.4 Laser transmission diagram
根據干擾激光的發射功率P和束散角Θ,可計算出激光到達被干擾目標探測器靶面的功率密度ρ(W/cm2):

(1)
式中:ρ為功率寬度(W/cm2);P為干擾激光功率(W);τ1為紅外成像光學系統的透過率;τ2為干擾激光單程傳輸的大氣透過率;θ為激光光軸對紅外成像系統的瞄準角(°);L為干擾距離(m);Θ為激光束散角(mrad);D為紅外成像光學系統通光口徑;d為激光在探測器上的彌散斑;D2/d2為光學系統的增益。
激光單程傳輸的大氣透過率,計算方法[18]見下:
τ2=exp(-β×L)
(2)
β=(3.91/V)(0.55/λ)p
(3)
式中:β為大氣衰減系數;L為干擾距離(km);V為能見度(km);λ為干擾激光波長(μm);p是與V有關的經驗常數,V<6 km時,p=0.585V1/3;V≥6 km時,p=1.3。
激光光斑飽和區域半徑r與到探測器靶面功率密度的關系[19]見下:

(4)
式中:ρ0為單像元飽和時的激光功率密度閾值。
3 激光對抗模擬
通過激光干擾模型模擬生成激光光斑。激光光斑在虛幻引擎中實質是粒子系統,其輻射區域大小由接收到的幅值信息即激光光斑飽和區域半徑決定。激光對抗模擬時,干擾源始終保持靜止狀態,其坐標位置不變,為(19872 cm,17078 cm,2454 cm)。調整紅外成像系統的位置、視場角及指向信息,完成不同距離、不同視場以及干擾激光不同入射角度的激光對抗模擬。模擬時干擾源激光發射功率、束散角均保持不變。
3.1 不同距離的對抗模擬
紅外成像系統設置視場角為8°,持續向干擾源逼近,干擾源保持在視場中心位置附近。取逼近過程中的紅外成像系統3個位置坐標,干擾源向目標發射激光,將不同距離下干擾前后成像效果進行對比分析,效果圖見圖5。

圖5 不同距離下激光對抗模擬Fig.5 Laser countermeasure simulation at different distances
模擬結果表明,隨著干擾距離的減小,到達探測器表面的激光功率密度增加,激光光斑飽和區域半徑相應增大,即干擾光斑的面積變大。
3.2 不同視場的對抗模擬
將紅外成像系統位置調整為(-52310 cm,189867 cm,279673 cm),指向信息調整為(3.27°,-56.0°,-66.8°),視場角設置為8°、6°和4°,干擾源保持在視場中心位置附近。干擾源向目標發射激光,將不同視場條件下干擾前后成像效果進行對比分析,效果圖見圖6。

圖6 不同視場下激光對抗模擬Fig.6 Laser countermeasure simulation in different fields of view
模擬結果表明,隨著視場角的縮小,紅外成像系統的光學增益隨之增大,到達探測器表面的激光功率密度增加,激光光斑飽和區域半徑r相應增大,即干擾光斑的面積變大。
3.3 不同入射角度的對抗模擬
將紅外成像系統位置調整為(-50042 cm,205575 cm,229543 cm),視場角設置為8°,調整紅外成像系統指向信息,將干擾源成像在視場中心、右上角及左側中部位置。干擾源向目標發射激光,將干擾前后成像效果進行對比分析,效果圖見圖7。

圖7 不同入射角度下激光對抗模擬Fig.7 Laser countermeasure simulation at different laser incident angles
模擬結果表明,在干擾距離及視場角不變的情況下,調整紅外成像系統指向,干擾源出現在紅外成像系統視場的不同位置,此時激光入射角度在±4°范圍內變化,但這幾乎不影響到達探測器表面的功率密度,干擾光斑面積也幾乎沒有變化,這一現象符合干擾光斑的空間平移不變性[20]。
4 結 論
以虛幻引擎作為開發工具,完成紅外成像激光對抗的干擾效果模擬。本系統作為光電對抗仿真模擬基礎平臺,集成了大氣透過率模型,當增加對抗目標的紅外輻射特性后,可用于光電對抗裝備對紅外目標的探測與跟蹤仿真,系統可擴展性較強,為光電對抗虛擬仿真研究提供了新的途徑。
下一步可將紅外制導模型加入到系統中,構成一個集探測、識別、捕獲、對抗以及評估為一體的全閉環動態對抗模擬系統,具有較廣闊的應用前景。
猜你喜歡
江蘇安全生產(2023年10期)2023-11-14 12:12:58
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
知識經濟·中國直銷(2018年3期)2018-04-12 06:43:21
商周刊(2017年22期)2017-11-09 05:08:31
家庭影院技術(2017年9期)2017-09-26 03:41:45
河南電力(2015年5期)2015-06-08 06:01:46