衛星差分碼偏差對北斗三號雙頻精密單點定位的影響
2024-04-08 11:58:42杜彥君賈小林姚頑強
國防科技大學學報 2024年1期
關鍵詞:方向
杜彥君,賈小林,姚頑強,許 瑾
(1. 西安科技大學 測繪科學與技術學院, 陜西 西安 710054; 2. 西安測繪研究所, 陜西 西安 710054; 3. 長安大學 地質工程與測繪學院, 陜西 西安 710054)
北斗三號衛星導航系統(BeiDou navigation satellite system phase Ⅲ,BDS-3)已正式開通服務,相較于BDS-2在空間信號、星座設計、信號體制等方面都有所改進,并能為全球用戶提供高精度、全天候的定位、導航、授時及短報文等服務[1-4]。BDS-3包含B1C(1 575.42 MHz)、B1I(1 561.098 MHz)、B2a(1 176.45 MHz)、B2b(1 207.14 MHz)和B3I(1 268.52 MHz)5個頻率信號,其中B1C、B2a與B2b是新增的頻率[5-6]。
差分碼偏差(differential code bias,DCB)是不同頻率或同一頻率不同測距碼由衛星和接收機硬件造成的時延差,在進行精密單點定位(precise point positioning,PPP)解算時,接收機端DCB通常歸算到接收機鐘差中進行參數估計,而衛星端DCB則需要改正[7-8]。文獻[9]對BDS-3不同頻點進行雙頻無電離層組合定位解算,除B1I/B1C因頻率接近、觀測噪聲大無法進行定位外,其余頻點組合均能進行定位;文獻[10]推導了BDS B1、B2、B3頻點單、雙頻無電離層組合PPP DCB改正公式,并分析其對定位精度的影響;文獻[11]對BDS不同偽距組合的DCB改正模型進行了單點定位分析;文獻[12]分析了BDS雙、三頻TGD及DCB改正模型對單點定位精度的影響。
目前,BDS PPP衛星端DCB研究多在于分析B1、B2、B3頻點,對于BDS-3新頻點,已有文獻對B1C/B2a組合進行改正或分析雙、三頻非組合DCB改正的影響[13-14],但其他頻點組合的DCB研究較少。基于此,為進一步分析DCB改正對定位性能的影響,本文推導了BDS-3不同頻點無電離層組合的衛星端DCB改正模型,采用多模GNSS實驗計劃(multi-GNSS experiment,MGEX)跟蹤站數據進行PPP解算,從定位偏差的均方根(root mean square,RMS)、最終定位精度和收斂時間等方面綜合分析BDS-3不同頻點組合的DCB改正對其定位的影響。
1 觀測方程及DCB改正模型
1.1 PPP觀測方程
PPP解算中常用雙頻無電離層組合消除電離層一階項的誤差,本文采用不同頻率的偽距及載波相位觀測值進行組合,其基本觀測方程如式(1)和式(2)所示。
(1)
(2)

1.2 BDS-3衛星端DCB改正模型
目前,德國地學研究中心發布的BDS-3 GBM精密鐘差產品是基于B1I、B3I無電離層組合觀測量得到的,故B1I與B3I組合時不需要改正,而在其他頻點組合計算時應改正,使鐘差產品與觀測量保持一致。
GBM精密產品中的衛星鐘差為:
(3)

若采用頻點a與b進行組合,則包含衛星碼硬件延遲的衛星鐘差如式(4)所示。
(4)
結合精密產品,將其歸算到B1I和B3I組合的基準下,有:
(5)

(6)
中國科學院目前發布的DCB產品已支持BDS-3,其具體定義如式(7)所示。
(7)
將式(7)代入式(6),即可得BDS-3各頻點無電離層組合衛星端DCB改正公式,如式(8)所示。
2 實驗與分析
2.1 數據來源及處理方案
為分析BDS-3衛星端DCB改正對PPP的影響,本文采用2021年6月13日至20日(年積日:第164~170天)連續7天4個MGEX跟蹤站(CHPG、GODS、LPGS、WUH2)的BDS連續24 h觀測數據進行不同頻點組合的PPP解算,數據采樣率為30 s,截止高度角為7°,精密產品采用德國地學研究中心發布的GBM精密星歷和精密鐘差,測站真實坐標從國際GNSS服務組織(international GNSS service,IGS)發布的SNX文件中獲得,DCB改正參數采用中國科學院發布的BSX文件。
(8)
由于BDS-3中地球同步軌道(geosynchronous orbit, GEO)衛星不播發B1C、B2a、B2b信號,所以實驗只使用C19~C46進行解算,已有文獻表明B1C/B1I組合觀測噪聲大,不適合進行定位解算[9]。本文在前期實驗中發現B2a/B2b同樣不適合定位,故不采用此兩種組合進行實驗。在數據處理時首先對B1I/B3I組合進行靜態PPP解算并分析其精度,之后采用兩種不同數據處理方案。方案1:對B1C/B2a、B1C/B2b、B1I/B2a、B1I/B2b、B1C/B3I、B2a/B3I和B2b/B3I共7種不同的雙頻無電離層組合進行靜態PPP解算,動態PPP解算時采用前5種頻點組合,不考慮衛星端的DCB改正(NO-DCB);方案2:對方案1中不同組合在解算中加入衛星端DCB改正,其余處理策略均相同。
2.2 可見衛星數及位置精度因子
分析了BDS-3的可見衛星數及位置精度因子(position dilution of precision,PDOP)。圖1為GODS站年積日第168天BDS-3可見衛星及PDOP值。由圖1可得:BDS-3的可見衛星數為5~11,平均為7.4;PDOP在1.4~2.7之間,平均約為2.3。

圖1 BDS-3可見衛星數及PDOPFig.1 BDS-3 number of visible satellites and PDOP
2.3 靜態PPP精度分析
按照方案1與方案2進行BDS-3靜態雙頻PPP實驗,將單天解結果坐標與真值作差后計算其RMS,收斂時間為連續20個歷元E、N、U三個方向的定位偏差均小于10 cm所需的時間,將24 h解最后10個歷元定位偏差的RMS視為最終定位精度。圖2為GODS站年積日第168天B1I/B3I組合24 h定位誤差時間序列圖。

圖2 B1I/B3I 24 h定位誤差Fig.2 24-hour positioning error of B1I/B3I
由圖2可以看出,B1I/B3I組合收斂后坐標波動平緩,數據分析得其收斂時間約為34.7 min,最終定位精度在水平及高程方向上均優于2 cm。
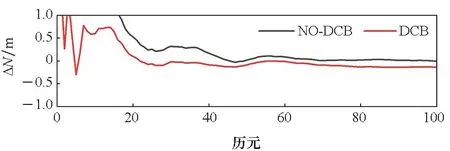
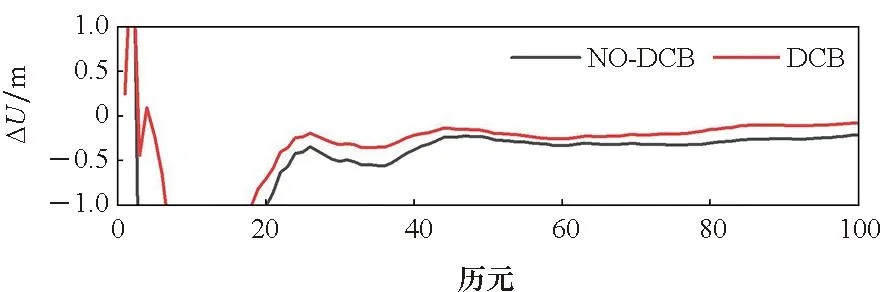
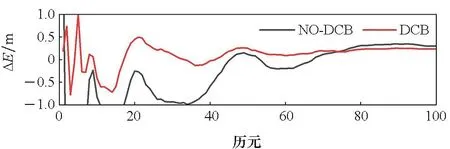
圖3~9給出了方案1與方案2中具有代表性的GODS站第168天在E、N、U三個方向上前100個歷元的坐標偏差時間序列,圖10為方案1與方案2的最終定位精度,表1統計了方案1與方案2在E、N、U方向上單天解定位偏差的RMS,表2根據文獻[15]計算了方案中7種BDS-3雙頻無電離層組合系數和噪聲放大因子。

(a) E

(b) N

(c) U

(a) E

(b) N

(c) U

(a) E

(b) N

(c) U

(a) E

(b) N

(c) U

(a) E

(b) N

(c) U

(a) E
(b) N
(c) U
(a) E

(b) N

(c) U

(a) 方案1 B1C/B2a、B1C/B2b、B1I/B2a、 B1I/B2b和B1C/B3I組合(a) Combination of B1C/B2a, B1C/B2b, B1I/B2a, B1I/B2b and B1C/B3I in scheme 1

(b) 方案1 B2a/B3I和B2b/B3I組合(b) Combination of B2a/B3I and B2b/B3I in scheme 1

(c) 方案2 B1C/B2a、B1C/B2b、B1I/B2a、 B1I/B2b和B1C/B3I組合(c) Combination of B1C/B2a, B1C/B2b, B1I/B2a, B1I/B2b and B1C/B3I in scheme 2

(d) 方案2 B2a/B3I和B2b/B3I組合(d) Combination of B2a/B3I and B2b/B3I in scheme 2
從圖3~10中可得,7種不同頻點組合的PPP在加入DCB改正后,前100個歷元的殘差值小于未改正前,特別是對于最初的歷元,在進行DCB改正后精度得到明顯提升,有助于濾波的收斂,縮短了收斂時間,同時減小了單天解定位誤差的平均RMS,但對于最終定位精度而言,DCB改正前后沒有明顯提升。
由圖10及表1可得:

表1 靜態PPP方案1與方案2單天解RMS
1)B2a/B3I組合及B2b/B3I組合定位精度較差,其E、N和U方向RMS遠大于其余組合,特別是U方向,即使是最終定位精度也難以達到cm級,并且在解算過程中存在部分歷元缺失。經DCB改正后,RMS有所提升,但相較其余組合仍然有明顯差距。由于收斂前定位誤差較大,且濾波收斂時間較長,RMS大幅增加,對于最終定位誤差,水平方向能達到cm級,U方向僅能達到dm級。對于該兩種頻率組合定位精度不佳,可能的原因是頻率組合的噪聲放大因子過大,由表2可知,B2a/B3I和B2b/B3I組合的噪聲放大因子分別為9.43和14.29,且B2a/B3I的定位精度優于B2b/B3I,而其余5種頻點組合的噪聲放大因子僅為2~4,故在BDS-3雙頻無電離層組合時,不建議使用該兩種頻點組合。

表2 BDS-3無電離層組合系數和噪聲放大因子
2)對于前5種頻點組合,B1C/B2a組合經DCB改正后E、N和U方向單天解RMS分別提升63.9%、61.8%和62.2%,B1C/B2b組合經DCB改正后E、N和U方向單天解RMS分別提升66.2%、64.8%和60.8%,B1I/B2a組合經DCB改正后E、N和U方向單天解RMS分別提升52.3%、50.7%和39.9%,B1I/B2b組合經DCB改正后E、N和U方向單天解RMS分別提升50.8%、47.2%和39.6%,B1C/B3I較其余4種組合提升較少,經DCB改正后E、N和U方向單天解RMS分別提升17.4%、28.0%和24.7%。可見,在加入DCB改正模型后,所有頻點組合的單天解RMS均有明顯提升,除B1C/B3I提升約20%外,其余4種組合提升率在40%~65%,但DCB改正僅對前100個左右歷元有明顯的精度提升,對于最終定位精度而言,DCB改正前后未有明顯變化,5種頻點組合的最終定位精度相當,水平方向優于2 cm,高程方向優于3 cm。
2.4 靜態PPP收斂時間分析
為分析DCB改正前后定位的收斂時間,圖11給出了靜態PPP方案1與方案2中各測站的平均收斂時間,表3統計了方案1與方案2的平均收斂時間。

(a) 方案1(a) Scheme 1
由于B2a/B3I、B2b/B3I組合定位誤差較大,特別是U方向難以收斂,故在統計時間時僅考慮E、N方向,LPGS站在該兩種頻點組合中定位精度差,收斂時間較長,其原因可能是多方面的:LPGS站平均可見衛星數為6.0,低于其余三站均值7.7。對LPGS B2b和B3I頻點數據進行質量分析后,數據完整率稍低,衛星高度角大于10°時,B2b和B3I數據完整率分別為94.34%和93.67%,B3I頻點多路徑效應和偽距噪聲稍大,其多路徑RMS為0.38 m,偽距噪聲RMS為0.53 m,且本身B2a/B3I和B2b/B3I組合噪聲放大因子過大,定位效果不佳,導致收斂時間長。方案2較方案1在收斂時間上有所提升,其中B2b/B3I組合提升約為36%,B1C/B2a與B1I/B2b提升約10%。整體而言,除B2a/B3I、B2b/B3I組合收斂時間較長外,經DCB改正后的BDS-3雙頻無電離層組合PPP的收斂時間約38 min,較未改正前平均提升約6%。

表3 靜態PPP方案1與方案2平均收斂時間
2.5 動態PPP性能分析
動態PPP具有更廣泛的應用前景和價值,為進一步分析DCB改正對動態PPP性能的影響,進行了仿動態實驗。因LPGS站數據質量不佳,B2a/B3I和B2b/B3I組合觀測噪聲因子過大,實驗僅采用其余三站進行5種頻點組合解算。以E、N、U方向均連續10個歷元小于20 cm視為動態PPP收斂。
圖12為動態PPP方案1與方案2最終定位精度,表4統計了動態PPP方案1與方案2的平均收斂時間。
由圖12及表4可得,方案2較方案1收斂時間均有所提升,除B1C/B3I提升4.0%外,其余組合提升18%~27%,平均收斂時間為59 min,較未改正前平均提升約20%。最終定位精度方面,各頻點間定位精度相當,均是水平方向優于高程方向,方案2較方案1變化不明顯,最大差異約為0.01 m,最終定位精度水平方向優于5 cm,高程方向優于7 cm。

(a) 方案1(a) Scheme 1

(b) 方案2(b) Scheme 2

表4 動態PPP方案1與方案2平均收斂時間
3 結論
本文推導了BDS-3不同頻點衛星端DCB改正模型,利用MGEX數據中心連續7天4站的觀測數據及德國地學研究中心提供的精密星歷及鐘差按兩種不同方案進行雙頻無電離層組合PPP實驗,分析了DCB改正前后對BDS-3 PPP性能影響,結論如下:
1)BDS-3可見衛星數約為5~11,平均為7.4,PDOP在1.4~2.7間,平均約為2.3。B1I/B3I組合靜態PPP濾波平緩,收斂時間約34.7 min,最終定位精度在E、N和U方向上均優于2 cm。
2)B2a/B3I及B2b/B3I組合定位精度及收斂速度較其他組合有明顯差距,其E、N方向收斂前定位誤差較大,且收斂時間長,靜態PPP最終能收斂至cm級,而U方向只能達到dm級。該兩種頻點組合定位精度不佳的原因可能與無電離層組合噪聲放大有關,B2a/B3I和B2b/B3I組的噪聲放大因子分別為9.43和14.29,遠大于其余5種頻點組合的2~4,在BDS-3無電離層組合時,不建議使用這兩種頻點組合。
3)B1C/B2a、B1C/B2b、B1I/B2a、B1I/B2b和B1C/B3I組合間定位精度和收斂時間相差不大,DCB改正對最初的歷元精度提高明顯,有助于濾波的收斂,但最終定位精度沒有明顯提升。靜態PPP單天解的RMS在E、N和U方向約為5.50 cm、2.50 cm和6.25 cm,較未改正前提升20%~65%,收斂時間平均為38 min,較未改正前平均提升約6%,最終定位精度水平方向優于2 cm,高程方向優于3 cm;動態PPP收斂時間平均為59 min,較未改正前平均提升約20%,最終定位精度水平方向優于5 cm,高程方向優于7 cm。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50