基于判據融合的異步電動機定子繞組匝間短路診斷
2024-04-10 03:27:38張俊華
電氣技術 2024年3期
張俊華
基于判據融合的異步電動機定子繞組匝間短路診斷
張俊華
(萬華化學(福建)有限公司,福建 福清 350300)
為解決定子繞組匝間短路故障診斷中常見異常運行工況干擾的問題,提出一種基于判據融合的異步電動機定子繞組匝間短路故障診斷方案。首先,考慮到故障特征之間的關聯性,提出一種以電流特征為主、電壓特征為輔的融合判據;然后,通過融合判據對定子繞組匝間短路故障及故障相進行診斷;最后,通過仿真實驗證明了該方案的有效性。
異步電動機;定子繞組匝間短路故障;判據融合;關聯性
0 引言
異步電動機廣泛應用于工業、農業及國防領域,其一旦發生故障,就可能會導致設備本身損壞,甚至造成生產及相關作業停工,產生巨大經濟損失[1]。異步電動機的主要故障類型包括定子故障、軸承故障、轉子故障。據統計,定子繞組匝間短路故障在所有故障中的占比達到30%[2]。早期定子繞組匝間短路故障的特征較微弱,不會觸發保護動作,隨著故障程度的加深,可能引起接地短路或相間短路。因此,及時診斷早期定子繞組匝間短路故障并預警,具有重要意義。
目前,定子繞組匝間短路故障診斷方案主要有基于故障特征和基于模式識別兩大類。基于故障特征的診斷方法主要是通過提取與定子繞組匝間短路相關的故障特征,包括電流時域[3-4]、電流頻譜分析和諧波[5-8]、派克變換[9-10]、縱向零序電壓[11]、接地電阻值[12]、溫度場分布[13-14]、磁鏈差矢量[15]、模態分量圖信號指標[16]等,來實現故障診斷。但這類方法存在以下問題:依賴單個故障特征或幾個孤立的故障特征,對其他具有類似特征的異常運行工況考慮不足,容易造成誤判;多采用復雜的現代信號數據處理和頻譜分析技術,運算成本高。
基于模式識別的診斷方法主要通過對信號進行特征提取后,利用模式識別算法建立特征與故障之間的映射關系,從而實現對定子繞組匝間短路故障的診斷,其實現方法主要有:融合多種現代信號處理方法和模式識別建立診斷模型[17-19];融合多種機器學習算法進行故障診斷[20-21];基于電動機數學模型的模型匹配識別方法[22];采用基于余弦相似性的狀態矩陣構建故障監測模型[23];在模式識別的基礎上融合D-S證據理論等多源信息融合算法,以提高診斷的準確性[24-25]。但這類方法構建的診斷模型極其依賴訓練數據,不同的訓練數據可能會形成不同的模型,因此現場適用性差;此外,這類方法多采用復雜的模式識別算法,計算量巨大。
針對以上問題,本文提出一種基于判據融合的異步電動機定子繞組匝間短路故障診斷方法。該方法基于數學模型和仿真數據分析,獲得以電流特征為主、電壓特征為輔的融合判據。該融合判據與定子繞組匝間短路故障具備強相關性,且能夠可靠鑒別其他常見的異常運行工況,對算力要求低,具備良好的應用價值。
1 故障仿真模型
為選取合理的定子繞組匝間短路故障特征,本文在文獻[26-27]的基礎上建立ab靜態兩相坐標系下的異步電動機定子繞組同相匝間短路故障數學模型,該模型以A相電壓與b軸重合為三相到兩相的變換基礎。
該模型對于定子繞組匝間短路的等效方法是,將繞組分為故障部分與正常部分,匝間短路相當于在故障部分并聯一個故障電阻sa2。定子A相繞組發生匝間短路故障如圖1所示,短路故障的嚴重程度由短路系數表示,其定義為
式中:nsa1為正常部分繞組匝數;nsa2為故障部分繞組匝數。
根據圖1,ab坐標系下故障數學模型包括電壓方程、磁鏈方程、運動方程和轉矩方程。
電壓方程為
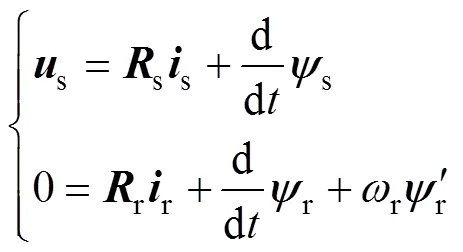

其中,有
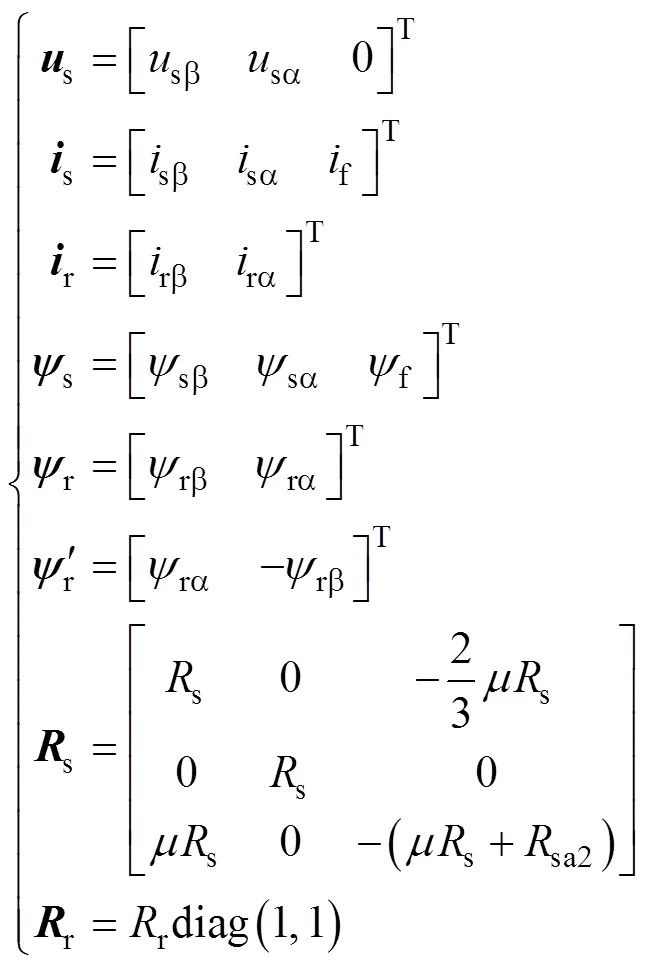
式中:sa、sb分別為定子a軸、b軸電壓瞬時值;sa、sb分別為定子a軸、b軸電流瞬時值;f為流過故障電阻sa2的故障電流;sa、sb分別為定子a軸、b軸磁鏈;f為故障繞組上磁鏈;ra、rb分別為轉子a軸、b軸電流瞬時值;ra、rb分別為轉子a軸、b軸磁鏈;s為定子繞組電阻;r為轉子繞組電阻。
磁鏈方程為
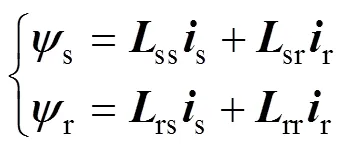
式中:ss為ab兩相坐標系下定子繞組自感矩陣;sr為轉子繞組對定子繞組的互感矩陣;rr為轉子繞組自感矩陣;rs為定子繞組對轉子繞組的互感矩陣。
其中,有
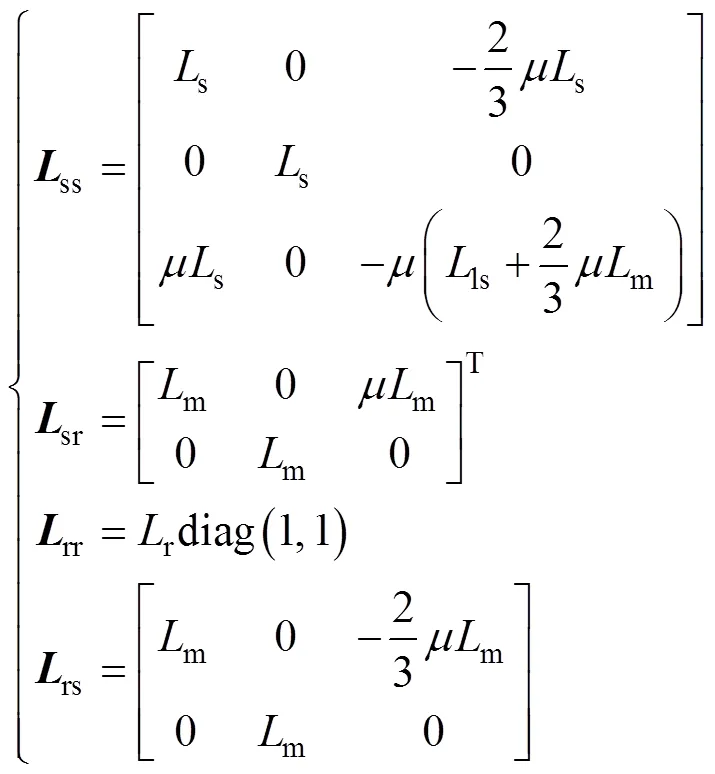
式中:s為ab兩相坐標系下定子繞組自感;ls為定子繞組漏感;m為兩相坐標系下定轉子互感;s=ls+m;r為兩相坐標系下轉子繞組自感,r=lr+m,lr為轉子繞組漏感。
運動方程為

式中:e為電磁轉矩;為極對數。
轉矩方程為
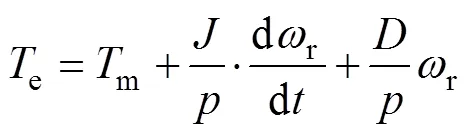
式中:m為負載轉矩;為轉動慣量;為阻尼系數。
基于故障數學模型,本文以磁鏈為狀態量,在Simulink中建立定子繞組匝間短路故障仿真模型,為下一步故障判據的選取提供支撐。
2 故障融合判據
2.1 故障特征分析
為選取有效故障特征,本文以定子A相繞組匝間短路為例,基于故障數學模型在Simulink中建立定子繞組匝間短路故障仿真模型,模型參數見表1。
在仿真過程中,假設定子每相繞組有42匝,則表征故障嚴重程度的短路系數與短路匝數的關系見表2。
為了直觀地表現定子繞組匝間短路故障的特征,本文選取短路系數值分別為0、0.047 6、0.095 2、0.142 9、0.190 5、0.238 1進行仿真,模擬匝間短路逐步加深的過程。仿真結果表明,發生匝間短路后,定子三相電流幅值和相位、定子三相電流Park變換結果均發生明顯變化。仿真結果如圖2~圖5所示,從圖中可以看出,當發生定子繞組匝間短路時,定子三相電流幅值和相位的平衡均被打破,其Park矢量軌跡由正圓變為橢圓,擴展Park矢量模出現二次諧波分量[28]。以上仿真結果表明,該故障模型能有效模擬定子繞組匝間短路故障的特征,為下面的故障特征分析提供了依據。
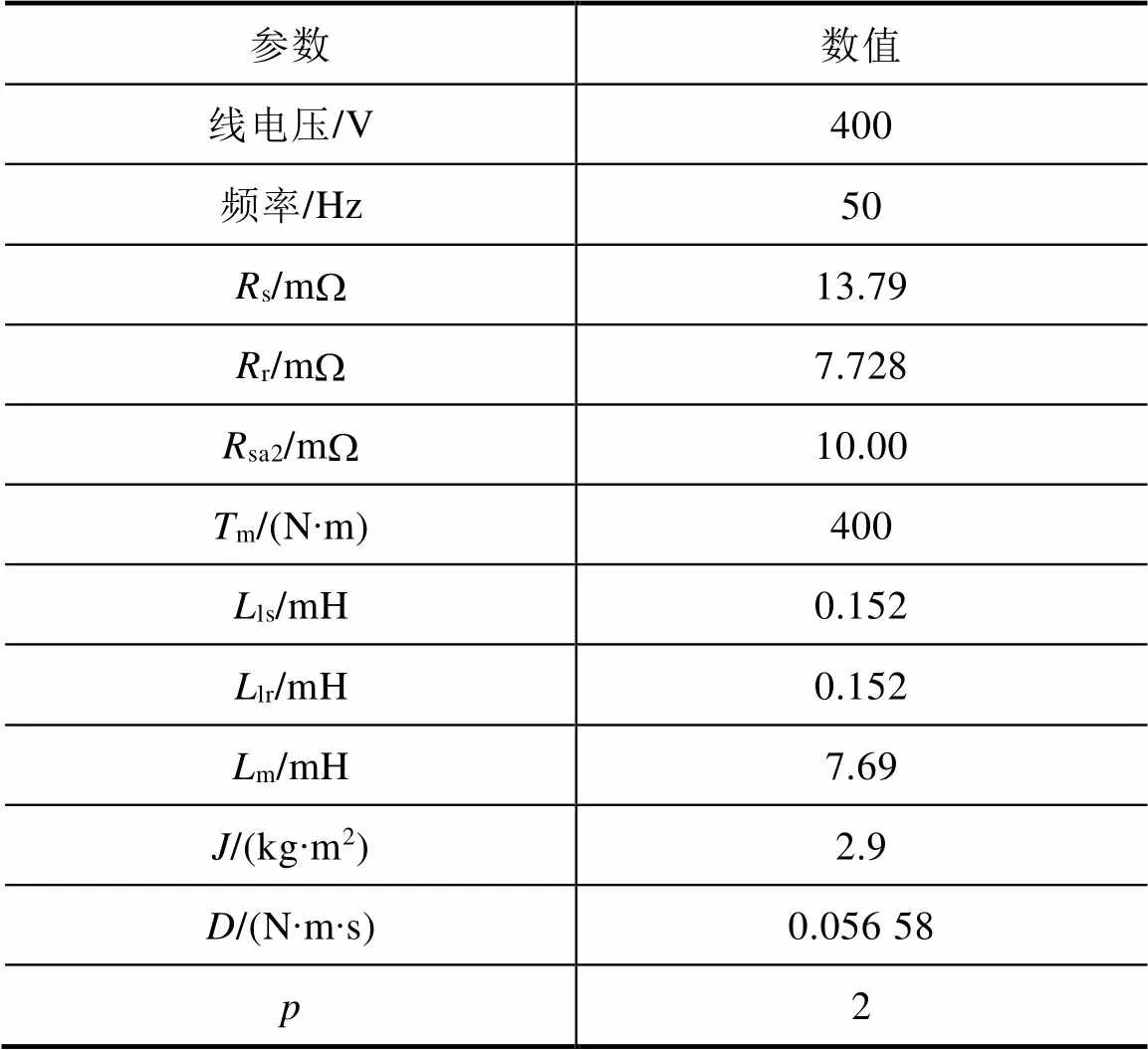
表1 模型參數

表2 短路系數與短路匝數的關系
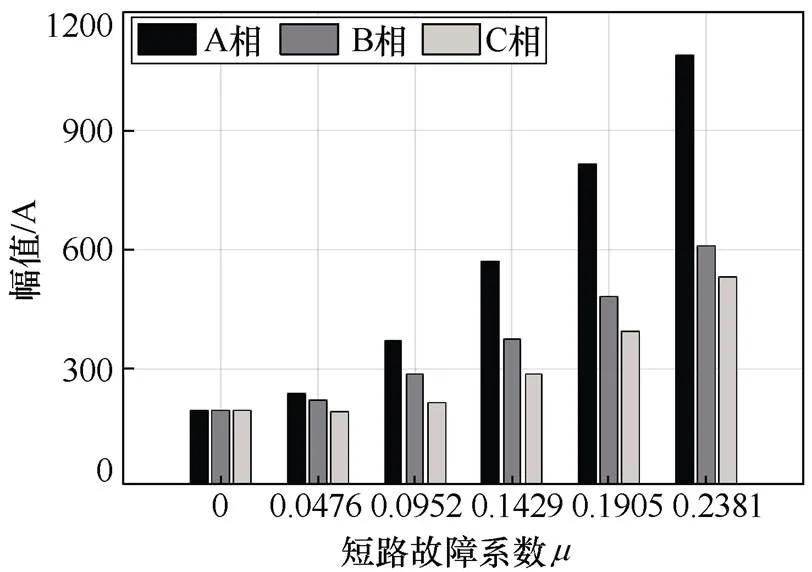
圖2 匝間短路電流幅值變化趨勢
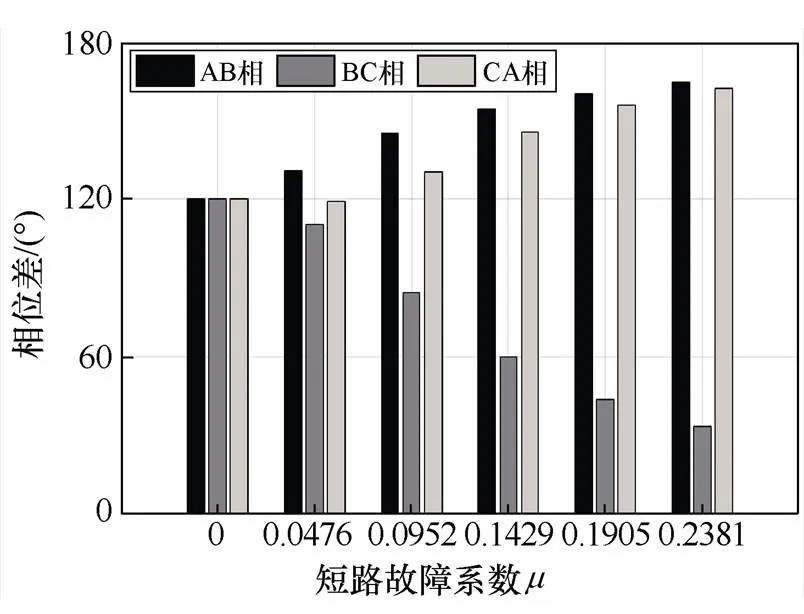
圖3 匝間短路電流相位差變化趨勢
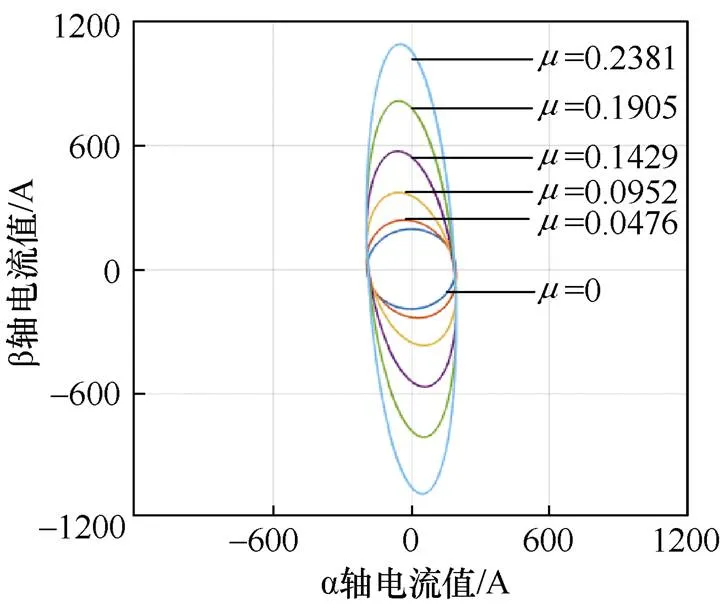
圖4 匝間短路電流Park矢量軌跡

圖5 匝間短路電流擴展Park矢量二次諧波分量
進一步分析圖2和圖3可得,在某相定子繞組發生匝間短路故障時,其三相電流幅值隨著故障程度的加深而增大,其中故障相電流幅值最大,其滯后相電流幅值次之,其超前相電流幅值最小。同時,定子三相電流相位差也發生明顯變化,具體為故障相與其滯后相、故障相與其超前相的相位差隨故障程度加深逐漸向180°靠近,而滯后相與超前相的相位差則逐漸向0°靠近。
進一步分析圖4和圖5可得,定子三相電流Park矢量軌跡長短軸比值和二次諧波分量均隨故障程度的加深而增大。
綜合以上分析可得,定子三相電流幅值、相位差和Park矢量軌跡長短軸與定子繞組匝間短路故障及其嚴重程度有強相關性。因此,可以選取上述定子電流特征作為定子繞組匝間短路故障診斷的主要判據。
然而,電動機運行的某些異常工況也會產生上述類似特征,如不進行可靠辨別,將導致誤判。包括電動機起動過程、電壓不平衡、定子外單相接地短路、定子外兩相短路、電動機與其他設備之間的高阻故障等在內的典型工況均會造成定子電流幅相不平衡和Park矢量軌跡橢圓化。因此,只通過定子電流特征無法在這些具有相似特征的故障中準確識別出定子繞組匝間短路故障。考慮到這些異常運行工況與定子繞組匝間短路故障下的定子電壓表現出一定的差異,本文在定子電流特征中加入定子電壓特征作為輔助判據。
2.2 故障判據選取
本文選取定子電流幅值、相位差和Park矢量軌跡長短軸比值作為主要判據,選取定子電壓幅值特征作為輔助判據,共形成3個融合判據。
1)幅值融合判據
定子繞組匝間短路故障及常見異常運行工況均會打破定子電流的平衡,但定子電流之間的幅值關系和幅值相別排序會表現出特異性。同時,定子電壓幅值與電流幅值的關聯性也具有一定的差異。
基于電流幅值大小及排序、電流幅值與電壓幅值之間的關聯性和差異性,將電流幅值判據與電壓幅值判據進行融合,得到融合判據一。該判據由一個包含6個元素的向量表示,向量的元素包括電流幅值相等個數、電壓幅值相等個數、電流幅值排序、最大值相、最小值相、最值相別與電壓一致性,其中幅值相等判斷要有一定的裕度,需要考慮裝置的測量精度和電動機制造工藝帶來的固有影響。
該判據中電流幅值相等個數、電流幅值排序、最大值相和最小值相用于表征故障時定子電流幅值特征之間的關聯性;電壓幅值相等個數、最值相別與電壓一致性則用于表征定子電流幅值特征與電壓幅值特征之間的關聯性。
2)相位差融合判據
定子繞組匝間短路故障及常見異常運行工況均會影響定子電流相位的平衡性。基于定子電流相位差大小及其排序關系與定子電流幅值大小的密切關聯性,將電流相位差判據與電流幅值判據融合后得到融合判據二。該判據由一個包含4個元素的向量表示,向量的元素包括等于120°個數、最大相位差相、電流幅值排序、相位差最大值相與電流幅值一致性,其中等于120°的判斷同樣要考慮裝置測量精度和電動機制造工藝帶來的固有影響。
該判據中,等于120°個數、最大相位差相表征定子電流相位特征;電流幅值排序、相位差最大值相與電流幅值一致性則表征相位特征與定子電流幅值大小的關聯性。
3)Park矢量軌跡融合判據
發生定子繞組匝間短路故障和其他常見異常運行工況時,定子電流Park變換矢量模均出現二次諧波分量,而某些異常運行工況在Park矢量軌跡長短軸比值大小方面具有一定的特異性。同時,考慮到Park矢量軌跡是定子繞組匝間短路故障的一個強相關性判據,因此針對Park變換,選取其軌跡圖長短軸比值判據為主,以電流和電壓幅值判據為輔進行融合,作為融合判據三。該判據由一個含3個元素的向量表示,向量的元素包括Park矢量軌跡長短軸比值、電流幅值相等個數、電壓幅值相等個數。
3 故障診斷方案
本文通過3個融合判據對定子繞組匝間短路故障進行診斷,并將相應的3個診斷結果進一步融合,實現對定子繞組匝間短路故障的最終診斷和對故障相的識別。
3.1 幅值融合判據診斷
基于幅值融合判據的故障診斷過程如下。
1)配置判據向量中各元素的賦值規則,具體 如下。
(1)電流幅值相等個數和電壓幅值相等個數共有3種結果:三相幅值均相等時值為3,兩相幅值相等時值為2,三相幅值均不相等時值為0。
(2)電流幅值排序共有7種結果:電流幅值相等個數值為3或2時電流幅值排序值為0;電流幅值相等個數值為0時,電流幅值排序A>B>C值為1,B>C>A值為2,C>A>B值為3,A>C>B值為4,B>A>C值為5,C>B>A值為6。
(3)最大值相和最小值相指電流相別,其取值各有4種結果:如果電流幅值相等個數值為3時,最大值相和最小值相值為0;電流幅值相等個數值為2時,如果僅有最大值相,則最大值相取值為A相為1、B相為2、C相為3,最小值相值為0;電流幅值相等個數值為2時,如果僅有最小值相,則最小值相取值為A相為1、B相為2、C相為3,最大值相值為0;電流幅值相等個數值為0時,同時有最大值和最小值,最大值相取值為A相為1、B相為2、C相為3,最小值相取值為A相為1、B相為2、C相為3。
(4)最值相別與電壓一致性共有5種結果,其判斷規則如下:幅值大小相序不一致時值為0,幅值大小相序排序均為0時值為1,有且僅有最小值相相等時值為2,有且僅有最大值相相等時值為3,幅值大小相序一致時值為4。
2)根據賦值規則,結合定子繞組匝間短路故障的對應特征,設置發生定子繞組匝間短路故障時的理論值為[0 3 1~3 1~3 1~3 0]。
3)根據賦值規則計算當前狀態的幅值融合判據向量的各元素值,對比其是否與理論值相符。如果相符,則判斷是定子繞組匝間短路故障,對診斷結果賦值為1;否則診斷結果賦值為0。
3.2 相位差融合判據診斷
基于相位差融合判據的診斷過程如下。
1)配置判據向量中各元素的賦值規則,具體 如下。
(1)等于120°個數共有3種結果:三個相位差均為120°時值為3,僅一個為120°時值為1,三個相位差均不為120°時值為0。
(2)最大相位差相共有4種結果:等于120°個數值為3時最大相位差相值為0;等于120°個數值為1或0時,最大相位差值AB相最大則值為1、BC相最大則值為2、CA相最大則值為3。
(3)電流幅值排序與幅值融合判據向量中的值一致。
(4)相位差最大值相與電流幅值一致性共有4種結果,其賦值規則為:最大值相與電流幅值一致且三相電流幅值相等則值為1,最大值相與電流幅值一致且兩相電流幅值相等則值為2,最大值相與電流幅值一致且三相電流幅值不相等則值為3,其他情況則值為0。
對于一致性的判斷,最大相位差與電流幅值的關系符合以下情況之一即判斷為一致:電流幅值均不相等時,幅值最小相外其他兩相相位差最大;兩相電流幅值相等且有最大值時,幅值最大值相與其滯后相的相位差最大。
2)根據賦值規則,結合定子繞組匝間短路故障的對應特征,設置發生定子繞組匝間短路故障時的理論值為[0 1~3 1~3 3]。
3)根據賦值規則計算當前狀態的相位差融合判據向量中各元素的值,并與理論值對比。如果一致,則診斷為定子繞組匝間短路故障,診斷結果賦值為1;否則診斷結果賦值為0。
3.3 Park矢量軌跡融合判據診斷
基于Park矢量軌跡融合判據診斷的過程如下。
1)配置判據向量中各元素的賦值規則,具體 如下。
(1)Park矢量軌跡長短軸比值共有3種結果:長短軸比值為1時值為0,比值大于1小于104時值為1,比值大于等于104時值為2。
(2)電流幅值相等個數和電壓幅值相等個數與幅值融合判據向量中的值一致。
2)根據賦值規則,結合定子繞組匝間短路故障的對應特征,設置發生定子繞組匝間短路故障時的理論值為[1 0 3]。
3)計算當前狀態的Park矢量軌跡融合判據向量中各元素值,并與理論值對比。如果一致,則診斷為定子繞組匝間短路故障,診斷結果賦值為1,否則結果為0。
3.4 診斷結果融合
將3個融合判據的診斷結果進一步融合,對定子繞組匝間短路故障及故障相進行綜合判斷,具體過程如下。
1)故障類型診斷:若3個融合判據的診斷結果均為1,則當前狀態診斷為定子繞組匝間短路故障;否則診斷為其他異常工況。
2)故障相診斷:若當前狀態診斷為定子繞組匝間短路故障,則根據電流幅值最大相和電流相位差最大相判斷故障相。具體的診斷方法如下。
(1)電流幅值最小值為C相,且電流相位差最大相為AB相時,故障相為A相。
(2)電流幅值最小值為A相,且電流相位差最大相為BC相時,故障相為B相。
(3)電流幅值最小值為B相,且電流相位差最大相為CA相時,故障相為C相。
4 故障診斷仿真
本文通過對不同故障和異常工況進行診斷來分析本文所提故障診斷方案的有效性,具體過程如下。
1)根據表1配置電動機基本參數,通過仿真模型獲取當前定子瞬時電流和瞬時電壓數據,計算對應的定子電流幅值、相位差、定子電壓幅值、Park矢量軌跡長短軸比值。定子繞組匝間短路故障和常見異常工況下的計算結果見表3。

表3 定子繞組匝間短路故障和異常工況下的計算結果
2)基于計算得到的定子電流幅值、相位差、定子電壓幅值、Park矢量軌跡長短軸比值,根據融合判據診斷規則,診斷當前狀態對應的幅值、相位差、Park矢量軌跡3個融合判據。定子繞組匝間短路故障和異常工況的3個融合判據診斷結果見表4。
3)獲取3個融合判據診斷結果后,根據診斷結果融合方案,通過與理論值比較獲取融合判據診斷結果。若融合判據診斷結果為[1 1 1],則說明當前為定子繞組匝間短路故障,否則當前為異常工況。融合判據診斷結果及故障類型診斷結果見表5。

表4 3個融合判據診斷結果
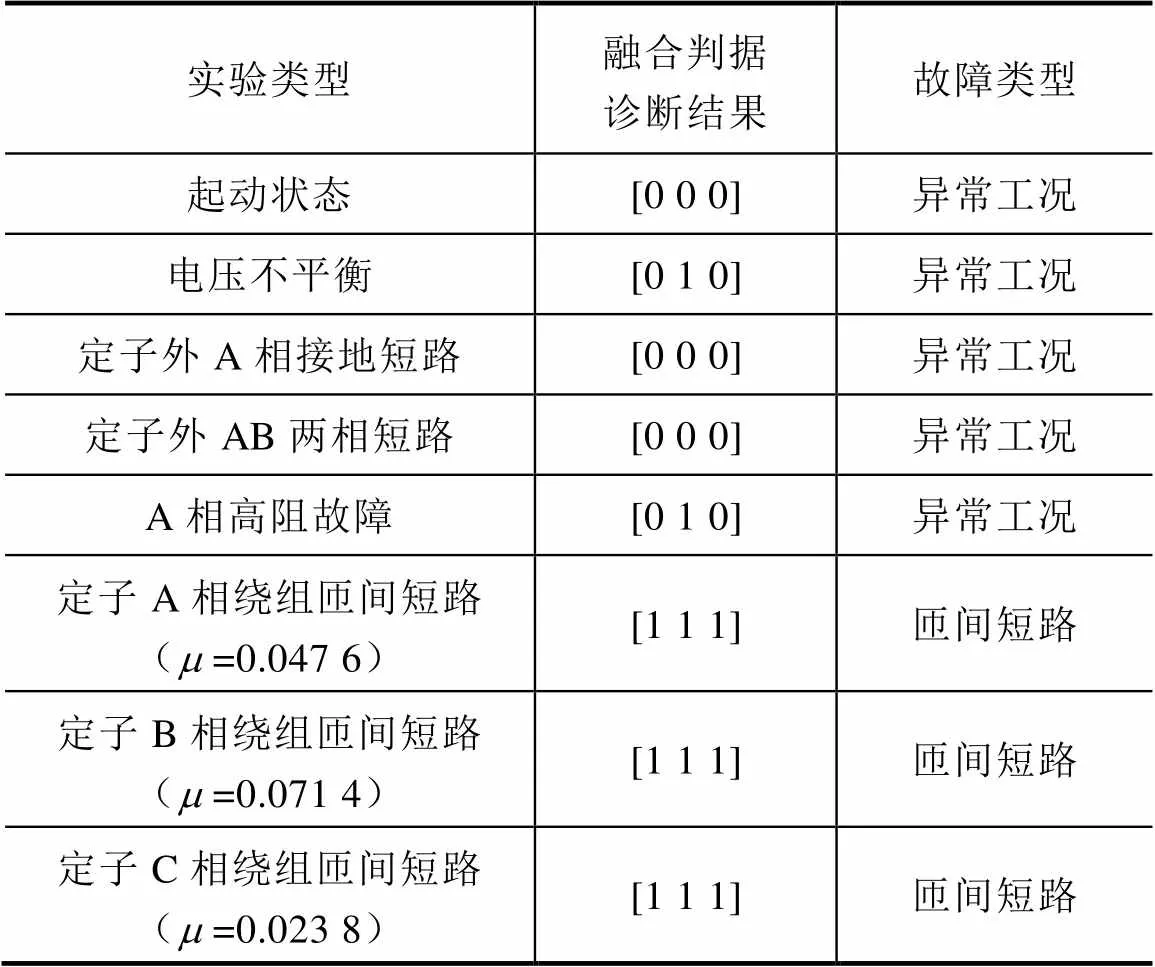
表5 融合判據診斷結果及故障類型診斷結果
4)在診斷出定子繞組匝間短路故障后,基于融合判據診斷時計算的最小幅值相和最大相位差相,實現對故障發生相的區分,故障相診斷結果見表6。
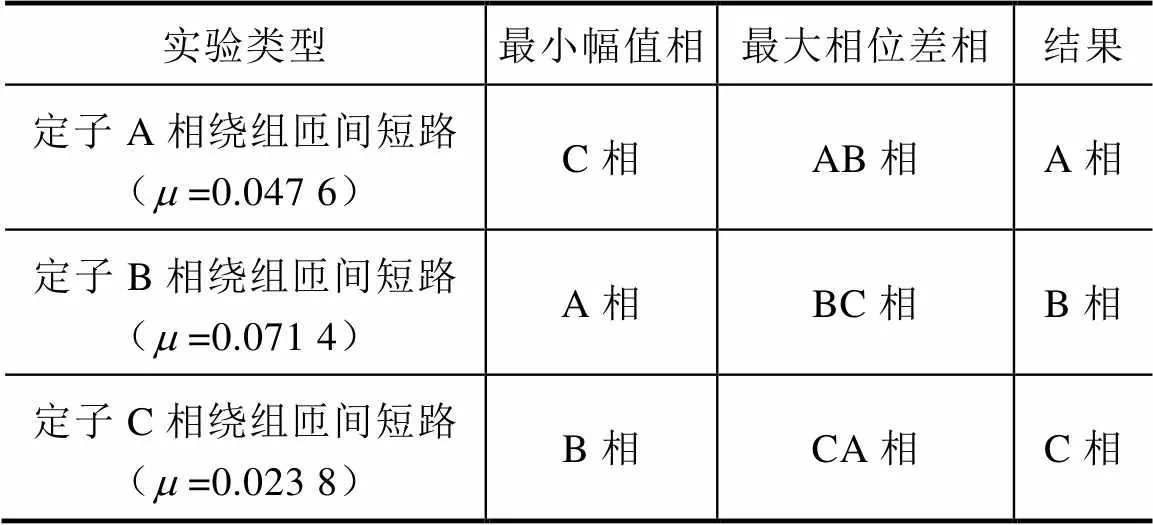
表6 故障相診斷結果
以上仿真結果證明了融合判據的正確性,并驗證了該故障診斷方案在識別定子繞組匝間短路故障和故障相時的有效性。
5 結論
本文提出了一種基于判據融合的異步電動機定子繞組匝間短路故障診斷方案,通過仿真實驗驗證了該方案的有效性,并得到以下結論:
1)該方案提出的融合判據綜合了多種故障特征,并考慮了故障特征之間的關聯性,能有效區分定子繞組匝間短路故障和其他常見異常運行工況。
2)該方案有效降低了診斷過程中的計算量,能直接植入現場已有的保護裝置,不需要添加額外的設備,降低了應用成本。
3)由于本文中判據的選取和融合方案,以及故障診斷方案基于仿真數據和故障原理,在應用到實際現場時還需要一定的優化完善。
[1] 唐斯, 陳新楚, 鄭松. 基于注意力與多尺度卷積神經網絡的電機軸承故障診斷[J]. 電氣技術, 2020, 21(11): 32-38.
[2] 孫麗玲, 李和明, 許伯強. 基于多回路數學模型的異步電動機內部故障瞬變過程[J]. 電力系統自動化, 2004, 28(23): 35-40, 75.
[3] 何玉靈, 孫凱, 王濤, 等. 基于變分模態分解與精細復合多尺度散布熵的發電機匝間短路故障診斷[J]. 電力自動化設備, 2021, 41(3): 164-172.
[4] 張業成, 劉國海, 陳前. 基于電流波動特征的永磁同步電機匝間短路與局部退磁故障分類診斷研究[J]. 電工技術學報, 2022, 37(7): 1634-1643, 1653.
[5] 魏東, 劉侃, 丁榮軍, 等. 基于多重同步壓縮變換的永磁同步電機初期匝間短路故障檢測[J]. 電工技術學報, 2022, 37(18): 4651-4663.
[6] 張雅暉, 楊凱, 李天樂. 一種利用融合相關譜的異步電機故障診斷方法[J]. 電機與控制學報, 2021, 25(11): 1-7.
[7] 陳勇, 梁洪, 王成棟, 等. 基于改進小波包變換和信號融合的永磁同步電機匝間短路故障檢測[J]. 電工技術學報, 2020, 35(增刊1): 228-234.
[8] WEI Dong, LIU Kan, HU Wei, et al. Short-time adaline based fault feature extraction for inter-turn short circuit diagnosis of PMSM via residual insulation monitoring[J]. IEEE Transactions on Industrial Elec- tronics, 2023, 70(3): 3103-3114.
[9] 魏書榮, 張路, 符楊, 等. 基于派克矢量軌跡橢圓度的海上雙饋電機定子繞組匝間短路早期故障辨識[J]. 中國電機工程學報, 2017, 37(10): 3001-3009.
[10] 陳眾, 伍雅娜, 冷鵬, 等. 異步電機定子繞組匝間短路故障診斷研究[J]. 電機與控制應用, 2019, 46(5): 120-125.
[11] 鐘守平, 王洪林, 陳佳勝, 等. 大型燃氣輪發電機組保護關鍵技術研究[J]. 電氣技術, 2021, 22(12): 67-72.
[12] 康逸群, 宋夢瓊. 大型發電機注入式定子接地保護應用與分析[J]. 電氣技術, 2020, 21(1): 129-132.
[13] 田代宗, 孫宇光, 王善銘, 等. 多相整流永磁同步發電機繞組內部相間短路的故障分析[J]. 電工技術學報, 2020, 35(6): 1262-1271.
[14] 陳鵬, 謝穎, 李道璐. 感應電機定子匝間短路故障溫升特性研究[J]. 電工技術學報, 2023, 38(18): 4875-4888.
[15] FU Yang, REN Zixu, WEI Shurong, et al. Using flux linkage difference vector in early inter-turn short circuit detection for the windings of offshore wind DFIGs[J]. IEEE Transactions on Energy Conversion, 2021, 36(4): 3007-3015.
[16] 肖啟明, 郭謀發. 基于變分模態分解與圖信號指標的配電網高阻接地故障識別算法[J]. 電氣技術, 2021, 22(5): 50-55.
[17] 郭昱君, 王愛元, 姚曉東. 基于BP神經網絡和小波包能量熵的異步電動機故障診斷[J]. 電機與控制應用, 2022, 49(10): 53-59.
[18] 許伯強, 何俊馳, 孫麗玲. 基于SAE與改進LightGBM算法的籠型異步電機故障診斷方法[J]. 電機與控制學報, 2021, 25(8): 29-36.
[19] 李俊卿, 陳雅婷, 李斯璇. 基于深度置信網絡的同步發電機勵磁繞組匝間短路故障預警[J]. 電力自動化設備, 2021, 41(2): 153-158.
[20] SONG Qiang, WANG Mingsheng, LAI Wuxuan, et al. On Bayesian optimization-based residual CNN for estimation of inter-turn short circuit fault in PMSM[J]. IEEE Transactions on Power Electronics, 2023, 38(2): 2456-2468.
[21] SHIH K J, HSIEH M F, CHEN Bojia, et al. Machine learning for inter-turn short-circuit fault diagnosis in permanent magnet synchronous motors[J]. IEEE Transactions on Magnetics, 2022, 58(8): 1-7.
[22] 施永茜, 姜斌, 冒澤慧. 異步電機定子匝間短路故障建模及檢測研究[J]. 控制工程, 2020, 27(1): 22-27.
[23] 張軍軍. 基于余弦相似性的在線監測系統智能預警方法[J]. 電氣技術, 2023, 24(9): 65-70.
[24] 趙耀, 陸佳煜, 李東東, 等. 基于機電信號融合的電勵磁雙凸極電機繞組匝間短路故障診斷[J]. 電工技術學報, 2023, 38(1): 204-219.
[25] 袁岳, 陳實, 劉璐瑤, 等. 基于改進D-S證據理論的變壓器多維信息融合及狀態評估[J]. 電氣技術, 2021, 22(6): 66-72.
[26] TALLAM R M, HABETLER T G, HARLEY R G. Transient model for induction machines with stator winding turn faults[J]. IEEE Transactions on Industry Applications, 2002, 38(3): 632-637.
[27] 劉卉圻, 韓坤, 茍斌, 等. 異步電機定子繞組匝間短路故障建模與分析[J]. 機車電傳動, 2013(6): 52-55.
[28] CRUZ S M A, CARDOSO A J M. Stator winding fault diagnosis in three-phase synchronous and a synchronous motors, by the extended Park’s vector approach[J]. IEEE Transactions on Industry Appli- cations, 2001, 37(5): 1227-1233.
Diagnosis of stator winding inter-turn short-circuit fault for asynchronous motors based on criterion fusion
ZHANG Junhua
(Wanhua Chemical (Fujian) Co., Ltd, Fuqing, Fujian 350300)
To solve the interference problem of other common abnormal operating conditions in the diagnosis of the stator winding inter-turn short-circuit fault, a stator winding inter-turn short-circuit fault diagnosis scheme based on criterion fusion for asynchronous motors is proposed. First, considering the causal relationship between fault features, fusion criteria with current features as the main feature and voltage features as the auxiliary feature are proposed. Next, these fusion criteria are used to diagnose the stator winding inter-turn short-circuit fault and fault phase. Last, the effectiveness of the scheme is verified through simulation experiments.
asynchronous motors; stator winding inter-turn short-circuit fault; criterion fusion; causal relationship
2023-10-26
2023-12-07
張俊華(1979—),男,江蘇省東臺市人,本科,高級工程師,主要從事電氣自動化工作。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21