北斗三號帶狀CORS系統基準站布設距離研究
2024-04-15 09:03:58王劍超高成發劉濛濛張瑞成王付有
測繪工程 2024年1期
王劍超,高成發,劉濛濛,尚 睿,張瑞成,王付有
(東南大學 交通學院,南京 211189)
連續運行衛星定位服務系統[1](continuously operating reference stations, CORS)的概念最早出現在20世紀90年代,它由衛星跟蹤基準站、系統控制中心和用戶數據中心、用戶應用、數據通信5個部分組成[2]。CORS技術的出現一定程度上彌補了傳統實時動態差分 (real-time kinematic, RTK)技術在長基線條件下因大氣誤差空間相關性降低,導致定位可靠性較差的問題[3],而cm級定位精度和動態定位的優勢,更使其成為當下全球導航衛星系統(global navigation satellite system,GNSS)的發展熱點之一。近年來GNSS領域高速發展,美國的全球定位系統(global positioning system,GPS)現代化進程不斷推進[4],我國也實現了北斗三號衛星系統的組網[5],多星座多頻的衛星系統建成,進一步推動了CORS技術發展。
CORS系統通常基于多個基準站組網來建立大氣內插模型,從而修正相關誤差實現精確定位用戶坐標[6],因此基準站的布設距離和基準站網的空間結構會直接影響CORS系統的數據處理效果[7]。文獻[8]對兩個測區進行對照試驗,結果表明分布均勻、網型結構良好的基準站網處理質量較好,反之網型不均勻則會影響基線處理質量。傳統的CORS系統一般采用Delaunay三角網的組網方式,但在高速公路、內河航運等條帶狀應用場景下,該種組網方法往往不能獲得良好的網型結構,因此其大氣誤差內插精度十分有限,導致其定位性能有所不足[9-10]。針對該問題,文獻[11]針對長距離帶狀分布的CORS系統提出了一種基于距離閾值的虛擬參考站(virtual reference station, VRS)與單站RTK組合解算模式,構建了帶狀區域的無縫服務與信號覆蓋, 但其對于該距離閾值的確定并沒有給出分析和結論,單站RTK的可靠使用范圍仍需進一步研究。
綜上所述,在類似高速公路的帶狀區域場景下,傳統的CORS系統受限于大氣誤差內插精度問題,其定位的可靠性和準確性無法得到有效保障,而在單站RTK與多站VRS結合的CORS服務模式下,其基準站布設間距問題仍有待探究。因此本文將利用江蘇某高速公路沿線已建成的帶狀基準站網數據和實地采集的控制點數據,探討在滿足實際作業精度的要求下,基于單站RTK和多站VRS的CORS服務模式的合理距離閾值,從而為基準站布設提供參考依據。
1 基于距離判定的單站RTK與多站VRS服務模式
1.1 數據處理方法
對于交通運輸線路上的條帶狀區域,針對性地建設基于單站RTK與多站VRS服務模式的CORS系統,可以有效提高帶狀區域CORS系統的定位性能。因此選取江蘇某高速公路為實驗案例,在該帶狀區域所建設的CORS系統具體數據處理方式為:
1)沿條帶狀線路建設多個連續運行基準站,獲取該區域的衛星觀測數據,在接收到線路上用戶終端發送的概略坐標信息后,確定與之對應的目標基準站解算網元并判斷用戶終端與基準站網絡的各個基站間的距離;
2)根據事先設定的距離閾值,選擇對應的定位服務方式從而提供差分改正數。
其中,事先設定的距離閾值是確定基站布設間距的前提,應根據單站RTK實際可覆蓋的定位距離判定。上述帶狀CORS系統數據處理流程如圖1所示。
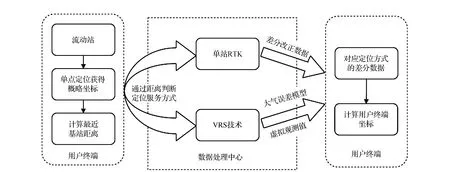
圖1 數據處理流程
在用戶端用戶首先利用自身概略坐標搜尋附近最近的基準站作為主參考站,同時將自身概略坐標反饋給服務端,當用戶終端與最近基站距離小于預設閾值時采用單站RTK的方式,直接進行差分解算;反之當大于該閾值時則采用VRS方式,利用CORS基準站觀測數據,首先固定參考站雙差模糊度,提取雙差電離層和對流層延遲,建立區域大氣延遲模型,最后內插得到虛擬觀測值數據,聯合用戶終端數據解算得到最終的用戶坐標。
1.2 帶狀CORS測站布設距離研究
在單站RTK中,大氣誤差仍是影響其模糊度固定效率和固定成功率的重要因素。在短基線情況下,大氣誤差可通過觀測值的雙差處理消減,但隨著基線距離增加,測站間系統誤差的空間相關性減弱,測站間系統誤差殘差不能忽略,此時可通過模型改正或者將其設為待估參數的方式進行解算,也可幫助實現中長距離的單站RTK模糊度固定[12]。但隨著基線距離增加,單站RTK定位的穩定性和可靠性仍舊受限,因此對于單站RTK可覆蓋的基線距離仍需進行實驗確定。
綜上所述,單站RTK中大氣誤差延遲受基線距離的影響明顯,若以上述方式進行帶狀CORS系統建設,確定基站布設的合理間距時應首先考慮使用單站RTK有效距離,從而確定VRS和單站RTK解算模式切換的距離閾值,其確定依據應至少包括:
1)至少保證短基線下單站RTK的定位性能;
2)盡最大努力減少多余基站的建設,降低建設成本。
因而在滿足實際作業精度要求的前提下,首先確定單站RTK可覆蓋的最遠距離是基站布設間距的重要參考依據。
2 北斗多頻非組合定位模型
2020年我國實現了北斗三號系統(BDS-3)的組網,在原有北斗二號系統(BDS-2)的B1I、B3I頻點的基礎上,增加了B1C、B2a兩個民用新頻點,各個頻點對應的頻率和波長如表1所示。
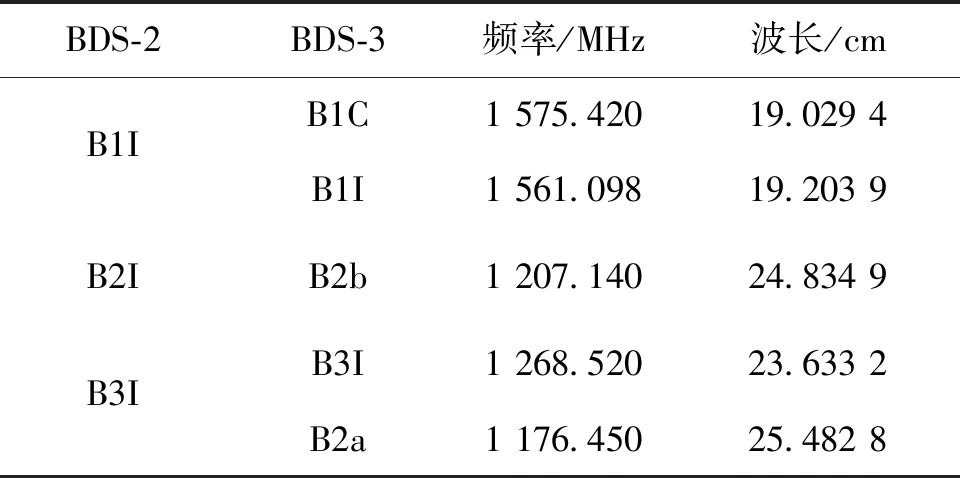
表1 北斗各頻點基本信息
其中B1C/B2a在信噪比、電離層延遲變化率等方面要優于L1/L5、E1/E5a,總體數據質量與GPS、Galileo的兼容頻率基本處于同一水平,BDS-3目前的觀測值質量已達到與GPS相當的水平,且優于北斗二號[13-15];另一方面,在中國區域BDS-3的衛星數量和衛星結構要明顯優于GPS,因此基于北斗衛星建設CORS系統也具有一定優勢。為具體探討在滿足定位精度要求的前提下,北斗CORS系統基準站的布設距離,本文將基于北斗三頻數據設計和開展相關實驗,后文所述的BDS-2三頻指B1I、B2I、B3I,BDS-3三頻指B1C、B1I、B2a。
2.1 RTK雙差解算模型
在短基線下RTK常使用觀測值雙差模型進行解算,觀測值雙差可有效削弱衛星鐘差、大氣延遲誤差、接收機鐘差、接收機和衛星端硬件延遲等方面的誤差,在短基線情況下,由于電離層延遲和對流層延遲的空間相關性較高,觀測值雙差處理能夠大大削弱其延遲誤差,因此雙差后其延遲誤差一般忽略不計,其對應的雙差非組合載波相位和偽距觀測方程可表示為:
(1)
式中:?Δ表示雙差算子;b和r分別表示基準站和流動站;i和j表示參考星和非參考星;φ和P表示以m為單位的載波和偽距觀測量;ρ表示衛星到接收機的距離;λ和N表示對應頻率載波的波長和模糊度;ε和e表示雙差載波相位和雙差偽距的觀測噪聲等其他誤差。當基線長度較長時,RTK雙差模型中的大氣延遲難以削弱到較小的程度,因而此時雙差模型應為:
(2)
式中:T和I分別表示對流層和電離層延遲;當基線長度較長時,電離層延遲和對流層延遲對解算模型會產生較大的影響,單頻點的雙差非組合模型定位精度會大大下降。因此可通過北斗多頻觀測值方程聯立的方法,提升觀測方程的強度,能夠明顯縮短固定時間,提高模糊度固定效率和可靠性[16];文中所使用的北斗三頻雙差非組合載波和偽距觀測方程為:
(3)
其中電離層延遲一般可通過模型改正,而對于對流層延遲,考慮到對流層的影響與高度角相關,因此可引入一個映射函數,用以表示天頂延遲與視線方向延遲之間的函數關系[17],此時對流層的干延遲可通過模型得到較精確的改正,僅需將濕延遲部分設為待估參數求解,可表示為:

(4)

2.2 附有模糊度參數的卡爾曼濾波方法
中長基線RTK定位采用附加模糊度參數的卡爾曼濾波模型,該模型的狀態方程和觀測方程如下:
(5)
式中:Xk、Xk-1為第k與第k-1時刻的狀態向量參數;Φk,k-1為第k-1到第k時刻的狀態轉移矩陣;wk為高斯白噪聲過程輸入噪聲向量;Lk為時刻的觀測向量;Ak為觀測方程的系數矩陣;vk為觀測值的噪聲向量。
在利用卡爾曼濾波解算雙差模糊度浮點解時,設某歷元觀測到的共視衛星為n+1,相應的有3個坐標改正數、兩個測站天頂對流層延遲參數和3×n個模糊度組成待求參數,因而狀態向量和系數矩陣可設置為:
Xk=[δX,δY,δZ,Tr,wet,Tb,wet,Δ?N1,i…Δ?Nn,i]T,
(i=1,2,3).
(6)
狀態向量矩陣中δX,δY,δZ為三維坐標改正值;Δ?Nn,i(i=1,2,3)分別表示第n顆衛星的3個不同頻點的雙差模糊度參數。相應的其系數矩陣為:
(7)
(8)



表2 先驗方差及動態噪聲設置
另外,濾波過程中需要確定觀測值的先驗噪聲,可結合衛星高度角建立相關隨機模型。在首次定位后,后續歷元由于接收機狀態信息不變(靜態),因此前后歷元間的狀態轉移矩陣可采用單位陣,但同時需考慮衛星升降帶來的變化。
2.3 模糊度固定策略

(9)
基于模糊度浮點解,采用LAMBDA算法即可得到模糊度固定解,并通過設定的Ratio值判斷是否正確固定,文中設置的Ratio值為3.0,進而根據式(10)計算可得到其余測站位置信息的固定解。
(10)
3 實驗分析
文中基于某高速路段已有的基準站及控制點采樣數據,設計了4組不同基線長度水平下的對照實驗,探討在滿足定位精度要求的前提下,基站的最優分布距離。該路段為南北走向,處于33°~35°N的中緯度地區,共有基準站10個,最長間距16.5 km,最短間距5.8 km,在基準站附近選取控制點,共計4個控制點,各控制點衛星俯視圖如圖2所示。

圖2 各控制點衛星俯視圖
其中控制點IV12為有較多高大樹木(9~10 m)的中度遮擋環境且觀測時段為中午,氣溫較高電離層較活躍;點IV22為開闊環境,四周無遮擋且地勢明顯高于周圍地區;點IV38和IV41為周邊有稀疏行道樹(3~4 m)或低矮房屋(3~5 m)的輕度遮擋環境,使用數據為年積日186和187(2022年)兩天的數據,數據采樣間隔1 s。各控制點與基準站組成的不同長度基線如表3所示,基線的具體處理策略如表4所示。

表3 各控制點基線長度信息 km
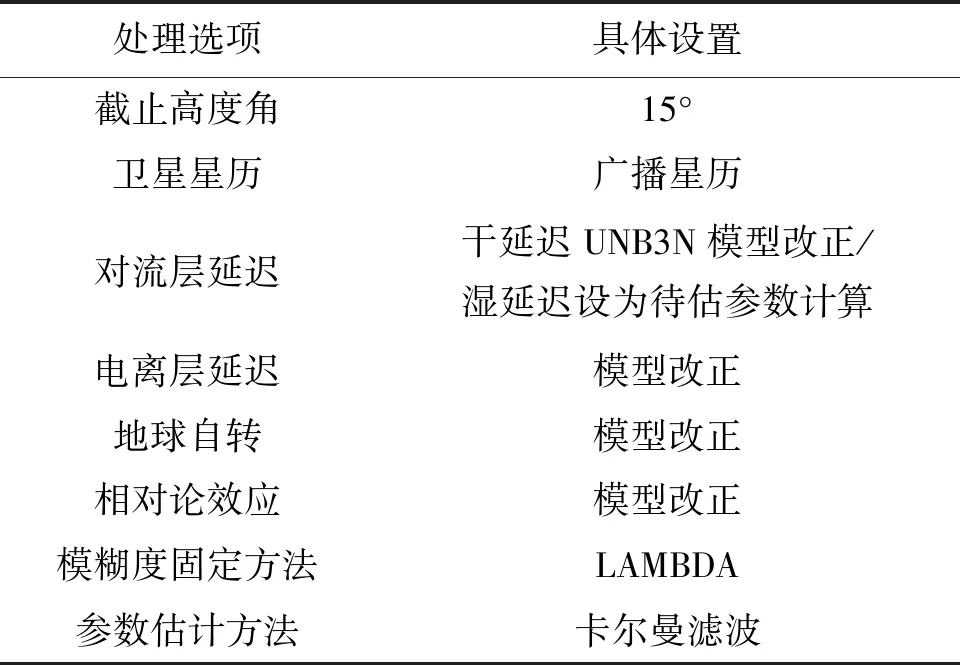
表4 數據處理策略
3.1 可見衛星數和PDOP值分析
在RTK定位中,衛星的幾何圖形強度與可視衛星數以及空間衛星分布結構有關,圖3統計了4個控制點1 800個歷元的可視衛星數和定位精度因子(position dilution of precision, PDOP)。
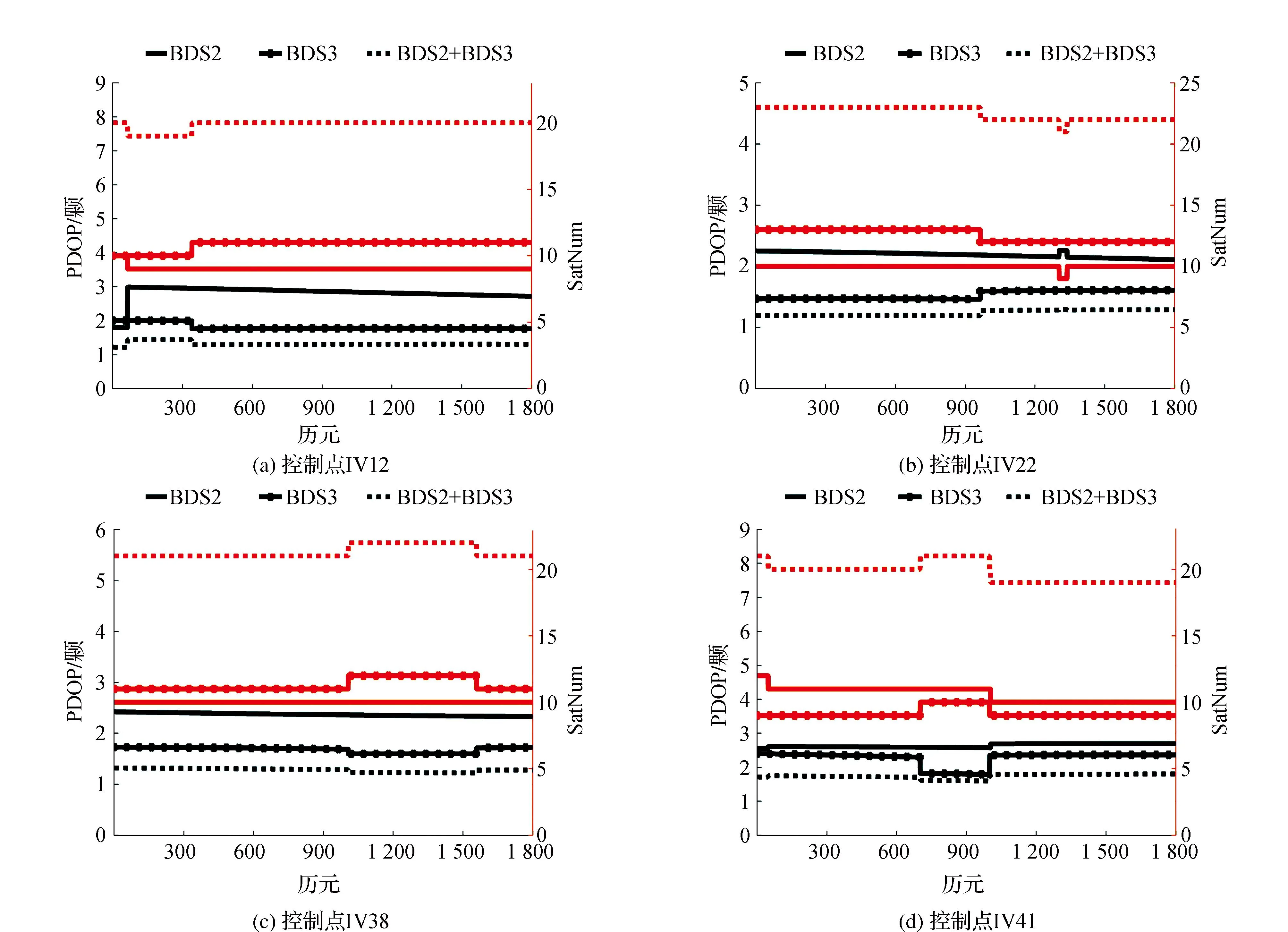
圖3 可見衛星數和PDOP值統計圖
從圖3中可以看到,BDS的衛星數目都在20顆左右,其中IV22點大部分時間能接收到23顆衛星的信號數量最多,IV12點接收的衛星信號數最少為19顆左右,也反映了點位間遮擋環境對可視衛星數的影響,總體而言由于控制點距離相近,其可視衛星數相差不大。另一方面,從各點位的PDOP統計結果來看,各點位在該采樣時段星站幾何結構較好,PDOP值隨可視衛星數目變化而變化,但全時段來看BDS-2+BDS-3的PDOP值均穩定在1~2之間,利于定位解算。
3.2 不同基線長度定位精度分析
對長距離條帶狀場景的基站建設而言,在滿足定位性能的前提下最遠距離的布站建設能夠極大節省建設階段的成本消耗,因此有必要對該場景下的CORS系統最優布站距離進行探討和評估。根據表3和表4中的基線組合和實驗參數設置,文中對4個控制點的5組不同長度的基線進行測試,使用年積日186(2022年7月5日)和年積日187(2022年7月6日)兩天的北斗三頻數據,數據采樣間隔1 s,采樣時長1 min,并以施工單位提供的控制點三維坐標成果為點位真值,分別統計了各控制點最后1個歷元的濾波解在東(E)、北(N)和高程(U)3個方向的定位偏差如圖4所示。其中各基線序號與表3中一一對應,為方便繪圖,后續圖中定位誤差均為取絕對值處理后的結果。
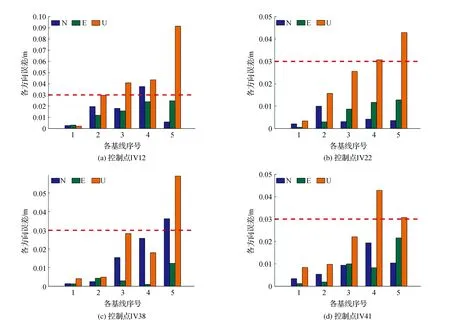
圖4 各控制點對應基線的N、E、U定位誤差
考慮到不同基線長度下,大氣延遲的影響程度不同,本文對于10 km以內的基線采用式(1)的解算模型進行短基線RTK定位計算,大于10 km的基線則采用式(3)的解算模型進行定位計算。
圖4給出了IV12、IV22、IV38和IV41 4個控制點的5組基線的定位結果,表5給出了各點具體的平面和高程方向上的定位誤差統計結果。在高程方向上,觀測數據質量較好的IV22、IV38和IV41 3組數據中,對于30 km以內的基線基本都能滿足高程3 cm的精度要求,而點IV12的1.3 km和15.4 km的兩條基線也基本能滿足3 cm的精度要求。平面上,IV12點的定位精度稍差,除1.3 km的基線外,誤差均在2~3 cm;點IV38小于24 km的3條基線和點IV41小于20 km的3條基線的平面上都能達到優于2 cm的精度;IV22點的精度最優,各基線均能達到優于1.5 cm的定位精度。
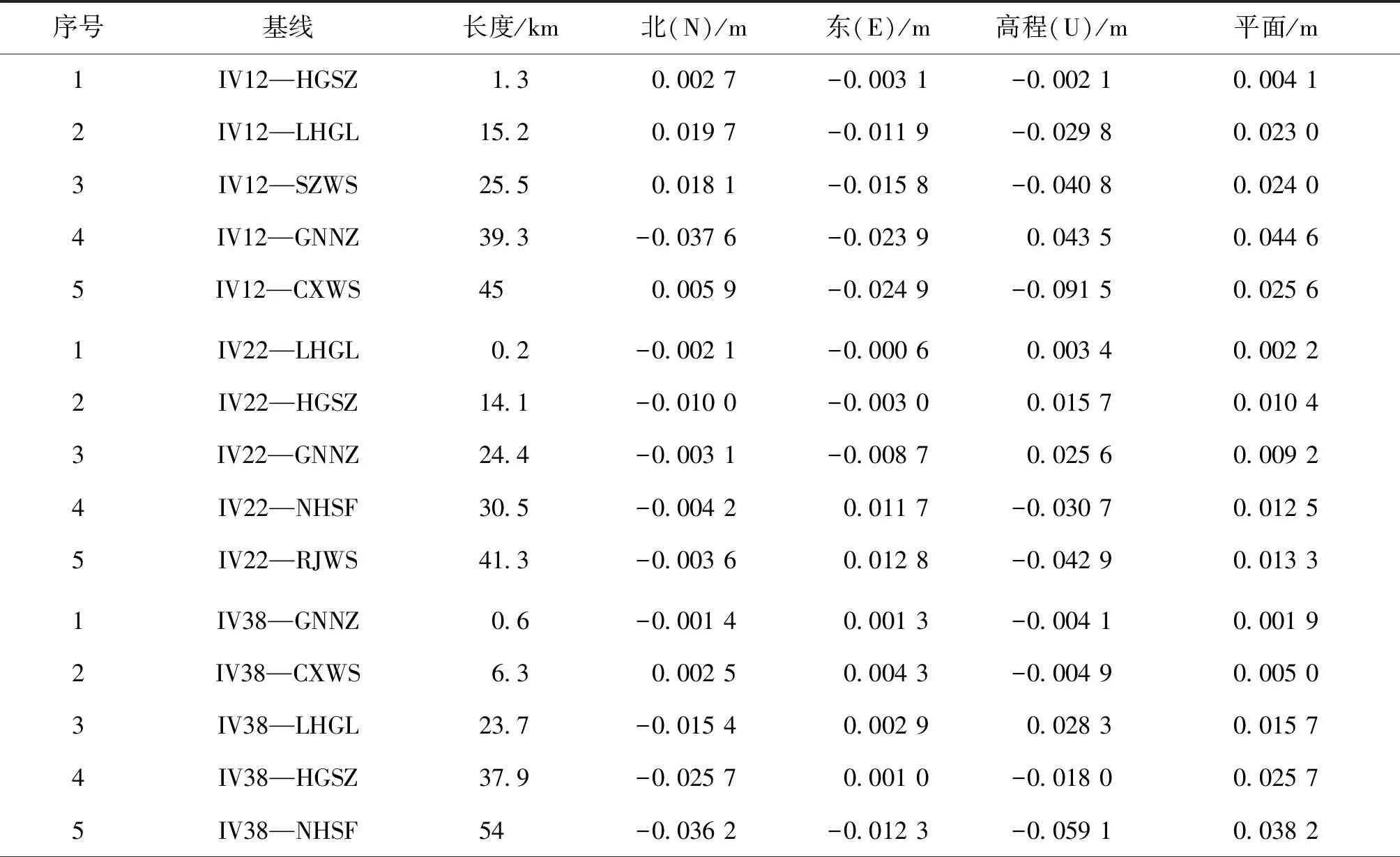
表5 各控制點各組基線定位誤差統計表
除定位誤差外,模糊度的固定率是評價RTK性能的另一個指標,觀測頻率的個數、衛星PDOP值、觀測數據質量、大氣誤差延遲的大小包括基線長度都會影響模糊度固定率。為分析不同基線長度對模糊度固定率的影響,利用上述控制點的1 min采樣數據,圖5統計了各基線解算過程的模糊度固定率,滿足以下兩個條件的歷元即判定為模糊度固定成功:
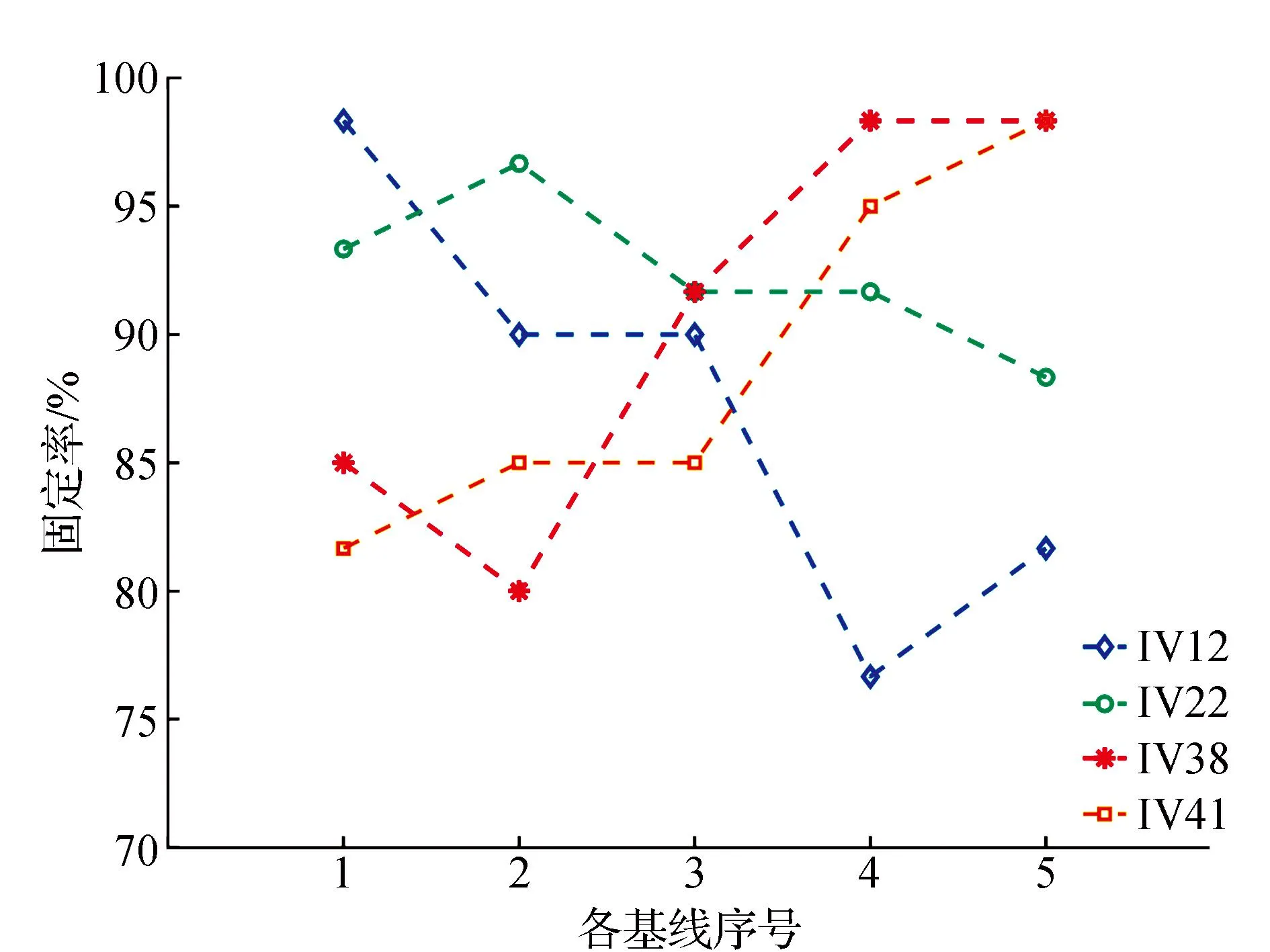
圖5 各基線固定率統計圖
1)Ratio值大于3;
2)平面及高程方向上定位誤差小于0.1 m,并至少維持5個歷元。
如圖5所示,在短基線情況下,模糊度的固定成功率普遍在90%以上,而隨著基線長度的繼續擴大,模糊度固定率逐漸下降,其中點IV12的第四條基線固定率最低僅有76.66%,總體而言,由于僅統計了1 min的計算結果,導致固定成功率在不同基線中的波動較大,但依舊能反映出基線長度對模糊度固定成功率有較大影響,其中大于30 km的基線模糊度固定率都相對較低。
為驗證基線解算的穩定性,選取IV38和IV41控制點,以平面2 cm、高程3 cm為最大定位誤差,分別設置1 min、3 min、5 min采樣時長進行解算,得到平面(P)及高程(U)方向上的誤差見圖6。此處兩控制點的基線序號對照表如表6所示。

表6 各基線長度及其序號對照表 km
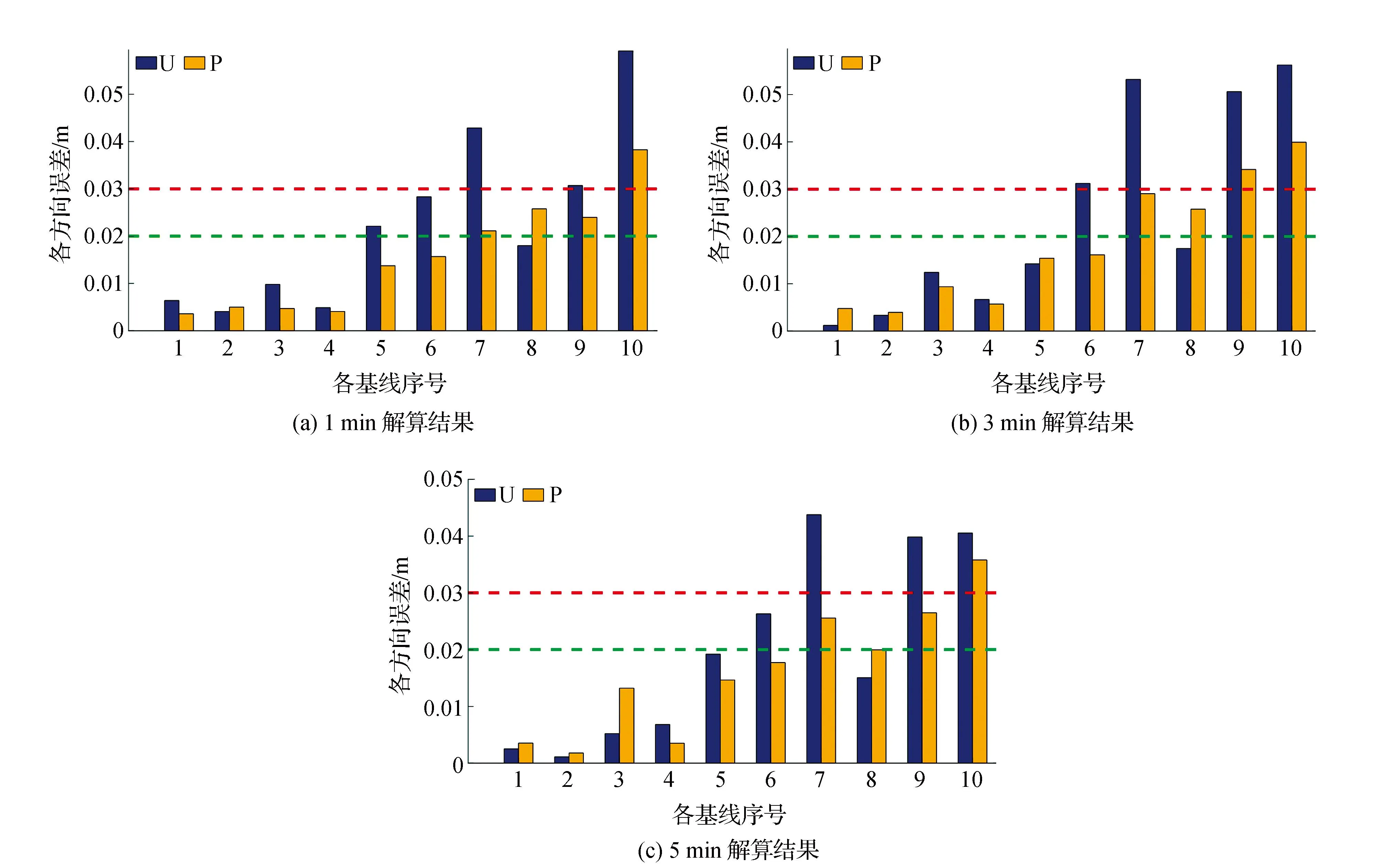
圖6 各控制點對應基線的N、E、U定位誤差
圖6中基線1~5的平面和高程方向定位誤差都能夠穩定保持優于預設定位誤差值,而基線6在平面上也能達到優于2 cm的平面精度,但高程方向上有所波動,其誤差在3 cm上下,后續的基線7~10在平面方向上的定位誤差都大于預設的2 cm最大誤差值,高程方向上也基本超出預設的3 cm最大誤差,可判定基線7~10的定位精度并不能滿足實際作業需要。
4 結束語
本文針對單站RTK和多站VRS的帶狀CORS服務模式中基站布設間距仍未確定的問題,選取江蘇省某高速公路測區內4個控制點每點5條基線的實測數據,分析在滿足實際工程定位精度的前提下基線布設能達到的最長距離,得出結論如下:
1)在開闊環境下,滿足這一定位精度的基線長度可以達到30 km;
2)在輕微遮擋環境下,當基線長度小于19.7 km時,其定位結果能夠穩定達到優于平面2 cm、高程3 cm的精度,而對于30 km以上的基線無法達到該精度;
3)在中度遮擋環境下,僅15 km范圍內的基線能達到實驗設置的平面2 cm、高程3 cm的定位精度。
本文的基線實驗以高速公路前期建設的施工放樣等應用為目標場景,采用靜態測站的仿動態處理來模擬真實的動態場景,而對于真實的動態場景中的問題暫未進行研究,包括遮擋環境的切換變化、用戶運動信息的利用等等,因此后續針對動態場景還需進一步探討研究,以獲得更符合實際應用需求的基站布設距離結論。