基于LabVIEW 的地面電子單元C接口眼圖算法研究與實現(xiàn)
2024-04-16 09:21:02陳文旗湛素麗
鐵道通信信號 2024年4期
關鍵詞:信號
連 樂,張 誠,陳文旗,湛素麗
地面電子單元(Lineside Electronic Unit,LEU)作為列控系統(tǒng)的地面通信設備,主要用于接收列控中心傳輸報文,并通過線纜將列控報文傳輸?shù)接性磻鹌鳎?]。有源應答器作為數(shù)據(jù)終端,負責將列控報文通過車載天線發(fā)送至經(jīng)過列車,實現(xiàn)列車安全運行。LEU 設備通過C 接口向有源應答器發(fā)送列控報文(即C1信號),因此C接口信號的性能及其驗證結(jié)果對整個列控系統(tǒng)的正常運行有著重大影響[2]。
王寧[3]對采集信號進行了眼圖分析與測算,但并未詳細介紹眼圖的計算設計與優(yōu)化;張美艷[4]通過K-means 聚類算法實現(xiàn)眼圖對C1 信號的質(zhì)量評估,但對數(shù)據(jù)量、數(shù)據(jù)處理與建模有一定要求;陳利東[5]提出的應答器在線檢測分析系統(tǒng)可解析C 接口采集信號中與眼圖參數(shù)相關的平均數(shù)據(jù)速率及最大時間間隔誤差指標信息,但并未系統(tǒng)性地提出C1信號眼圖計算方法。
基于目前LEU 產(chǎn)品C1 信號眼圖算法的研究現(xiàn)狀,結(jié)合常見應用場景,本文提出LEU產(chǎn)品C1輸出差分雙相調(diào)制(Differential Bi-Phase-Level,DBPL)信號眼圖算法,可作為衡量C1信號傳輸質(zhì)量的關鍵手段。本算法基于LabVIEW的豐富函數(shù)庫以及快捷的圖形化編程方式等優(yōu)點,實現(xiàn)算法框架搭建以及各計算模塊的功能,并對眼圖參數(shù)進行計算,算法的硬件環(huán)境設計簡單易實現(xiàn),不僅適用于一般眼圖測試環(huán)境,同樣適用于LEU設備的生產(chǎn)環(huán)境。
1 眼圖模型及參數(shù)要求
C1 信號眼圖模型見圖1。圖1 中,T為一個DBPL 碼元的平均周期,T1=0.6T,V2為C1 信號峰-峰值,V1=0.74V2,Tjitter為眼圖抖動時間。除上述參數(shù)外,眼圖參數(shù)還包括C1 信號的平均數(shù)據(jù)速率MDR、眼圖上升時間Tr、眼圖下降時間Td、眼圖入侵掩模點數(shù)Pc。掩模即根據(jù)波形的眼圖特性生成的四邊形,如圖1所示的中間陰影部分。
圖1 眼圖模型
《應答器傳輸系統(tǒng)技術(shù)條件》(TB/T 3485—2017)[6]明確了對C1 信號眼圖各參數(shù)的指標要求,見表1。
表1 C1信號眼圖參數(shù)指標要求
2 算法設計
2.1 硬件設計
算法的硬件設計框圖見圖2。硬件環(huán)境包括被測設備(Device Under Test,DUT)、供電模塊(PXIe-4112 板卡)、處理模塊、采集模塊(PXIe-5122 板卡)、PC 端。其中,DUT 特指LEU 設備;處理模塊主要功能為分離LEU 設備輸出的混合信號中的C1差分信號;采集模塊主要功能為采集C1差分信號并存儲為離散點集。眼圖算法設計是以C1 差分信號離散點集作為數(shù)據(jù)源進行處理計算,采集數(shù)據(jù)源的采樣率選為100 Mb/s,采樣長度選為1 Mbit,通過2 個無源探頭信號相減獲得差分信號。示波器探頭選用國家儀器公司的CP400X 型無源探頭;PC 端為算法運行平臺,結(jié)合采集模塊獲取的離散數(shù)據(jù)點計算信號眼圖與參數(shù)。

圖2 眼圖硬件設計框圖
1)電源板卡PXIe-4112 的參數(shù)為:輸出電壓0~60 V;電源通道數(shù)量2;最大電流1 A。
2)示波器板卡PXIe-5122 的參數(shù)為:輸入電壓-10~10 V;最大帶寬100 MHz;最大采樣率100 MS/s;板載內(nèi)存大小256 MB/ch。
3)示波器探頭CP400X的參數(shù)為:最大額定電壓DC60 V,AC30 V;衰減率10∶1;帶寬400 MHz;輸入電容13 pF。
2.2 軟件設計
算法的軟件設計包括實現(xiàn)C1 信號眼圖的顯示以及參數(shù)的計算。
2.2.1 MDR計算
MDR計算方法為選取一組1 500 位連續(xù)碼元,用1 500除以上述1 500個碼元的實際時域跨度獲得平均數(shù)據(jù)速率[7]。算法流程見圖3,計算步驟如下。

圖3 MDR計算流程
Step 1確定碼元位置。
首先獲得DBPL 碼元過零點及所有過零點集Ni,其中Xi、X(i+1)為任意2 個相鄰過零點的時間軸坐標。將Ni點集中首尾不完整的碼元數(shù)據(jù)刪除,獲得點集Nj。DBPL 碼元模型見圖4[8],可通過所有過零點集Nj獲得實際碼元過零點集Gi,通過Gi計算MDR值[9]。
圖4 DBPL碼元模型
Step 2計算MDR值。
Gi中從G1開始連續(xù)取1 500個值,即(G1,…,G1500),且在Gi中連續(xù)取上述數(shù)據(jù)長度的組合,如(G1501,…,G3000)、(G3001,…,G4500)、(G4501,…,G6000)…,直至Gi最終剩余值不足一組。每組數(shù)據(jù)采用相同的計算方式,取Mi為上述各組的MDR值,以Mx為例計算式為
式中:10-9為時間單位s 與ns 的換算,下同。其余Mi值計算方法同上,則
式中:564.48 為C1 信號標準數(shù)據(jù)率的值,單位kbit/s。通過式(2)可篩選出當前多組平均數(shù)據(jù)速率偏差最大的一組計算結(jié)果[10]。
Step 3生成眼圖。
計算MDR平均值A和平均周期內(nèi)點數(shù)a。
式中:n為Gi集合中可組合大小為1 500 個值的集合個數(shù),由Gi實際數(shù)據(jù)長度決定。
如圖1 所示,眼圖模型由數(shù)據(jù)集切片和重疊形成[11],切片起始點可自定義,此處取44為標準C1信號數(shù)據(jù)速率的半碼元點數(shù)。切片長度L0為
式中:b為標準C1信號數(shù)據(jù)率的碼元點數(shù);△L為實際波形碼元點數(shù)對比標準碼元點數(shù)的補償值。
最終將獲得的每組切片起始點對齊即可生成眼圖,切片組成的點集為Qi。眼圖形成原理示意見圖5,C1信號生成眼圖示意見圖6。
圖5 眼圖形成原理示意
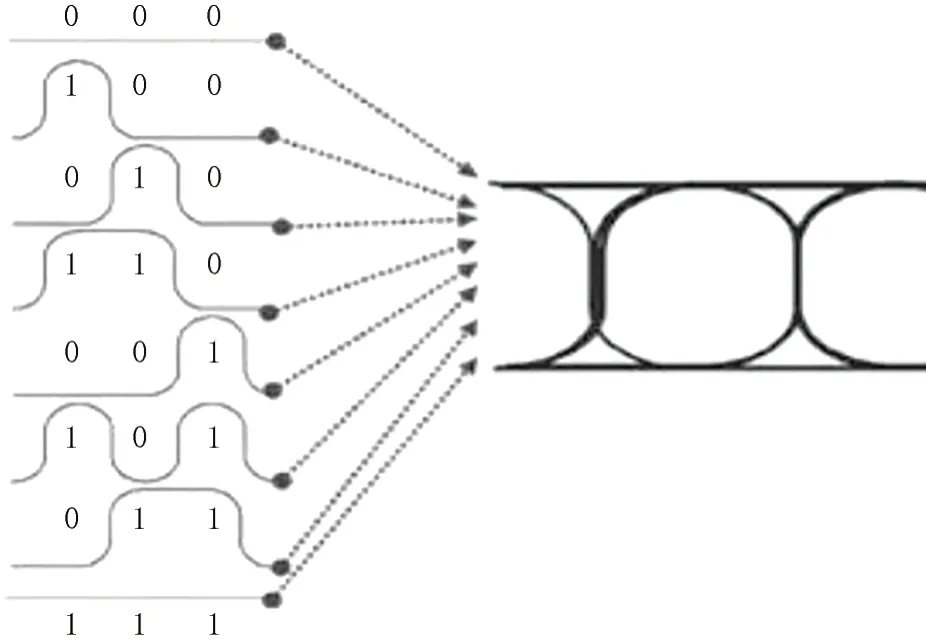
圖6 C1信號生成眼圖示意
2.2.2 抖動時間Tjitter計算
眼圖的抖動參數(shù)可作為衡量信號傳輸質(zhì)量的參數(shù)之一。抖動值可體現(xiàn)出周期性信號中各周期間的偏差量,以表征信號在傳輸過程中的受影響程度[12]。Tjitter計算方法如下。
調(diào)整橫坐標軸偏差,Qi點集中各切片的過零點重新調(diào)整后,獲得新過零點集Qj。計算抖動時間時,找出Qj點集中xi為0 或近似為0 的點,由各切片零點組成左右2 組抖動點集。其中,Zi、Zj為左邊抖動點集的任意值,Ui、Uj為右邊抖動點集的任意值,則
左側(cè)抖動時間為
右側(cè)抖動時間為
眼圖抖動時間為
眼圖抖動時間的計算流程見圖7。
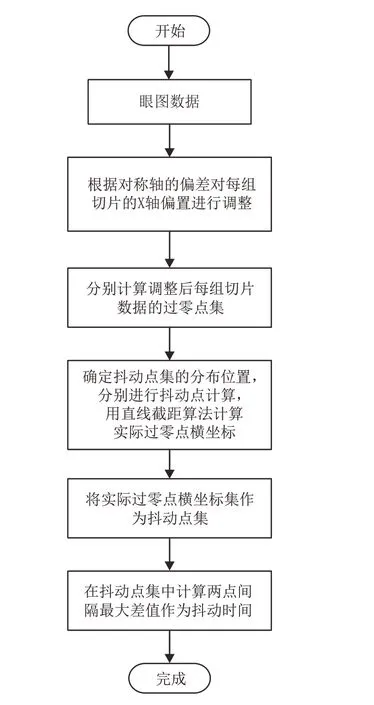
圖7 抖動時間計算流程
從圖6 中可以看出,正常情況下單眼眼圖(眼圖寬度為2個DBPL碼元周期)有2個區(qū)域穿過橫坐標軸,因此眼圖的每組數(shù)據(jù)均有1 個或2 個過零點值,且在計算過程中須分開處理,處理方式相同。
2.2.3 眼圖的上升時間和下降時間計算
眼圖的上升/下降沿分別取眼圖峰值的10%與90%所對應的上升沿/下降沿的時間軸長度。具體來說,由眼圖點集Qi中每組切片的碼元位置可知,上升時間和下降時間的計算可分為左右2 組,2 組數(shù)據(jù)均采用相同的方法計算,最終取2 組中的上升/下降時間的最小值。
Step 1計算峰值的10%點與90%點。
在Qi點集的每組切片中,取波形最大值為Mi,最小值為Ni,則:
眼圖左側(cè)波形峰值的90%處值對應點Li的縱坐標yLi為
眼圖左側(cè)波形峰值的10%處值對應點L′i的縱坐標yL′i為
眼圖右側(cè)波形峰值的90%處值對應點Ri的縱坐標yRi為
眼圖右側(cè)波形峰值的10%處值對應點R′i的縱坐標yR′i為
當上述計算獲得的縱坐標值在眼圖縱坐標集中無對應值時,采用插值法獲得[13]。
Step 2區(qū)分切片的上升趨勢或下降趨勢。
對于任意一組切片,若yi≥y(i+1),則該過零點對應的碼元為下降趨勢;若yi≤y(i+1),則該過零點對應的碼元為上升趨勢。其中yi、y(i+1)為任意一組切片中第i個過零點與它下一個相鄰點對應的縱坐標值。
Step 3計算上升時間和下降時間。
根據(jù)上述計算可獲得左側(cè)上升點集、左側(cè)下降點集、右側(cè)上升點集、右側(cè)下降點集。上升/下降時間即為橫坐標間隔;眼圖左側(cè)上升/下降時間為Li點集中的最小差值,即Min{|Lm-Ln|},以及L′i點集中最小差值,即Min{|Lk-Lb|},其中m和n、k和b分別為Li、L′i各點集中的任意2點;眼圖右側(cè)上升/下降時間為Ri點集中的最小差值,即Min {|Rm1-Rn1|},以及R′i點集中最小差值,即Min{|Rk1-Rb1|},其中m1和n1、k1和b1分別為Ri、R′i各點集中的任意2點。最終,眼圖上升時間、下降時間的計算式為
眼圖上升時間和下降時間的計算流程見圖8。
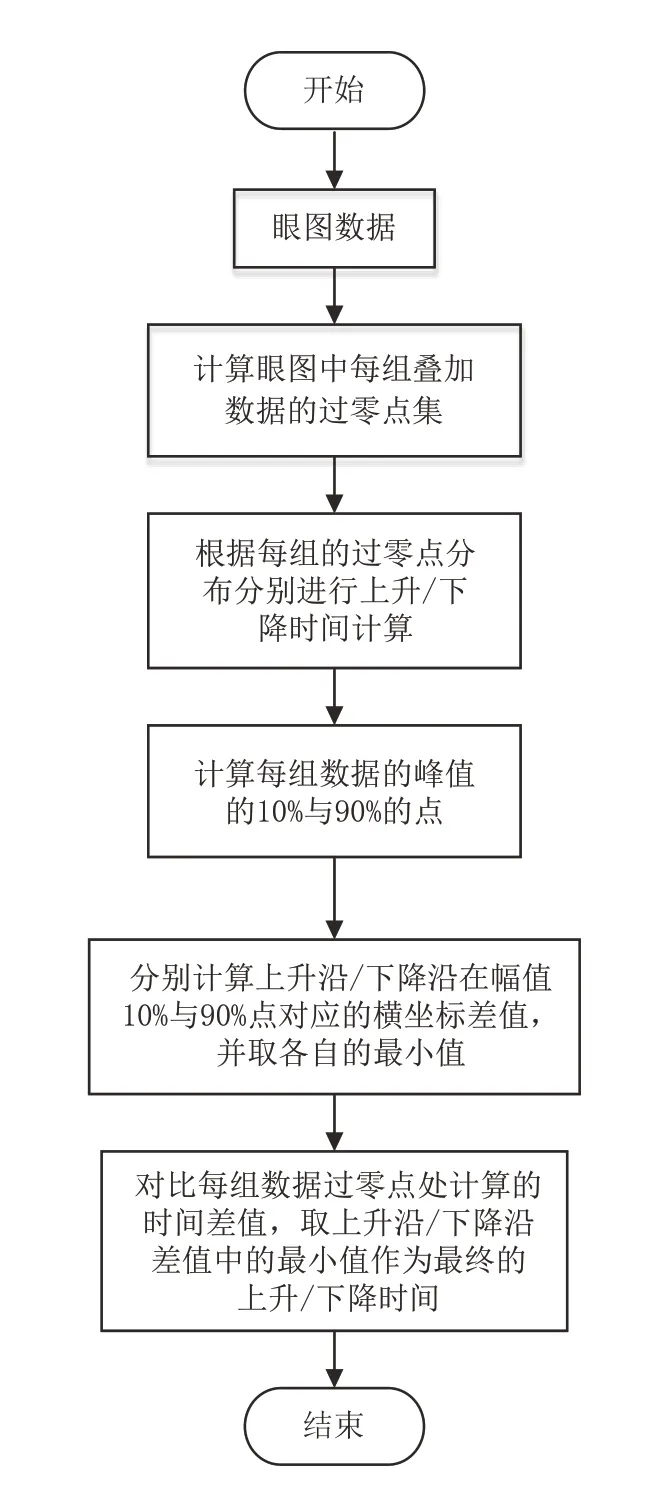
圖8 上升/下降時間計算流程
2.2.4 掩模入侵點計算
掩模是根據(jù)波形的眼圖特性生成的四邊形,入侵算法用于判定是否有波形入侵掩模范圍,如圖1所示的中部陰影部分。具體過程如下。
Step 1構(gòu)建掩模模型并計算頂點坐標。
建立眼圖掩模模型,見圖9。可通過確定1、2、3、4 共4 個頂點的坐標值計算掩模范圍,4 個頂點坐標分別為(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4)。由圖9得出的各點坐標值為點1(x1,V2/2),點2(x2,0),點3(x1,-V2/2),點4(x4,0),其中x1=x3。
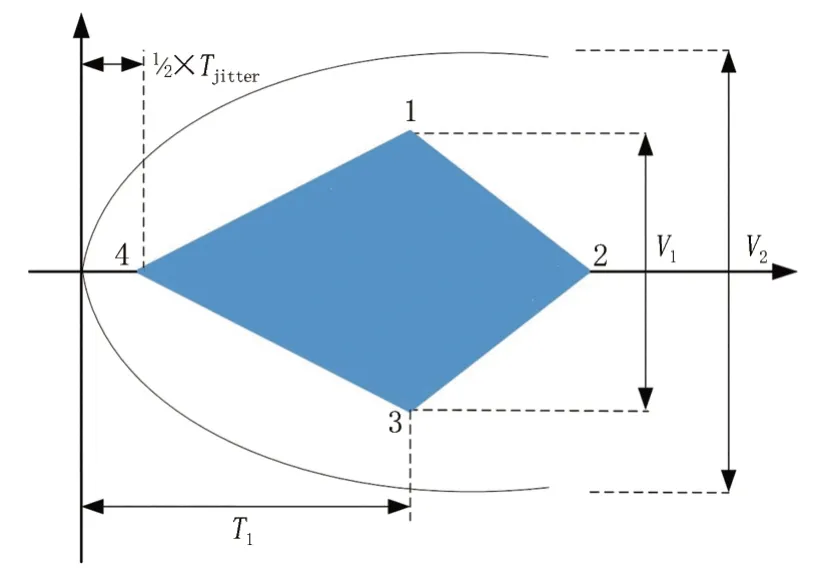
圖9 眼圖掩模模型
左側(cè)抖動點集為Zi,右側(cè)抖動點集為Ui,因抖動時間取抖動點集中任意2 點的最大間隔值,因此設定Z1、Z2與U1、U2分別為求得的左側(cè)、右側(cè)抖動時間對應的點,由此可獲得x1、x2、x3、x4分別為
至此可獲得掩模4 個頂點坐標,根據(jù)直線定理可求出4條直線方程為
Step 2計算入侵點。
將眼圖各切片點集中在掩模范圍內(nèi)的橫坐標,代入掩模四邊對應的直線方程的橫坐標,若獲得的值小于該點的縱坐標,則該點入侵掩模內(nèi)部,由此判斷所有眼圖切片是否存在掩模入侵點。
設定Qi(xi,yi)為眼圖任意切片中一點的坐標,其中x4≤xi≤x1,將xi代入式(22),獲得的值為Y。因此,當|Y|>|yi|時,判定Qi點入侵掩模;當|Y|≤|yi|時,判定Qi點未入侵掩模。計算入侵點流程見圖10。
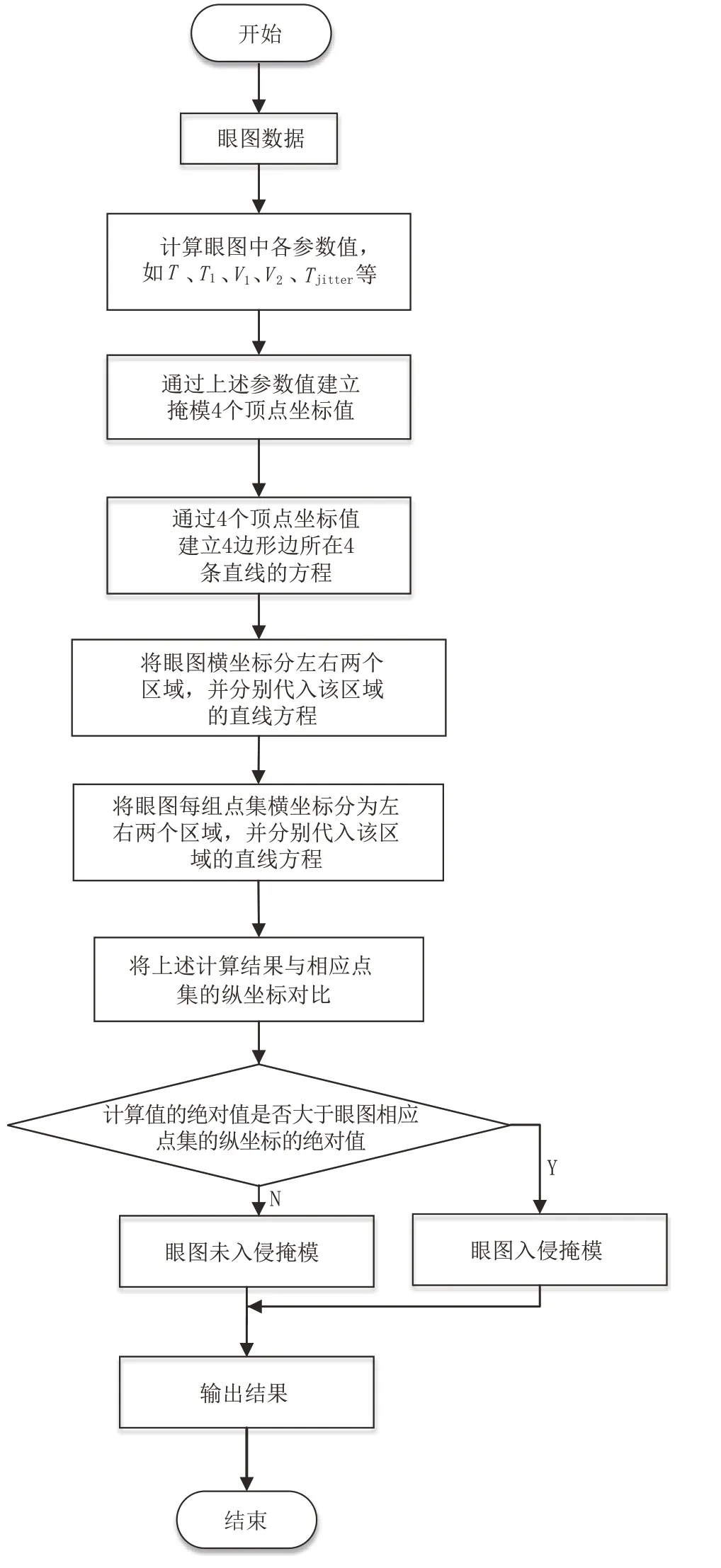
圖10 計算入侵點流程
3 算法實現(xiàn)與對比
3.1 算法實現(xiàn)
結(jié)合上述各參數(shù)計算流程,通過LabVIEW 平臺實現(xiàn)的眼圖測試軟件界面見圖11,包括眼圖波形、眼圖各參數(shù)的計算結(jié)果,以及根據(jù)標準對各參數(shù)的判定結(jié)果,從界面可直觀獲得信號的眼圖特性以及對被測設備信號傳輸性能的判定。算法程序包括離散點數(shù)據(jù)讀取模塊、眼圖計算模塊、結(jié)果顯示與判定模塊。其中,眼圖計算模塊包括眼圖顯示子模塊和參數(shù)計算子程序模塊,是算法實現(xiàn)的核心部分。
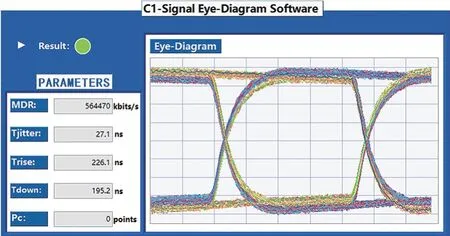
圖11 眼圖測試軟件界面
3.2 眼圖計算對比
為驗證以上眼圖算法的可靠性,利用泰克示波器(自帶眼圖計算模塊)對同一LEU 設備的C1信號進行眼圖測試,并將示波器計算結(jié)果與眼圖算法計算結(jié)果進行對比,對比結(jié)果分別見表2、圖12、圖13。

表2 示波器測試結(jié)果與眼圖算法計算結(jié)果對比
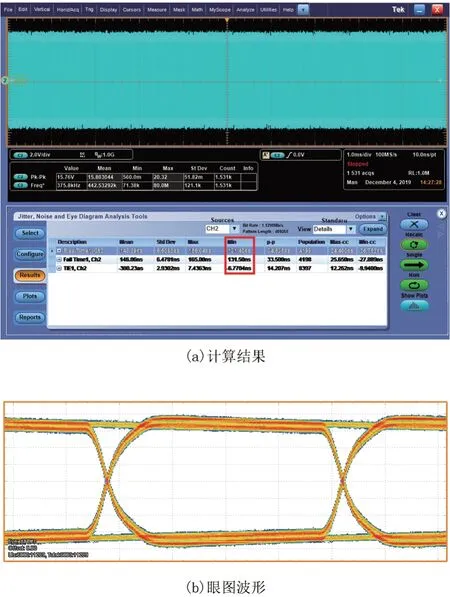
圖12 示波器測試結(jié)果
試驗共進行了5 組計算,表2 數(shù)據(jù)為其中一組。通過縱向?qū)Ρ妊蹐D算法的5 組計算結(jié)果可得出,對同一被測設備的輸出信號,算法的計算結(jié)果較為接近,且同一參數(shù)的計算值也較穩(wěn)定,計算結(jié)果通過聚類算法可獲得穩(wěn)定的分布范圍[14],此處暫不詳述。
橫向?qū)Ρ妊蹐D算法與示波器眼圖模塊采集的離散數(shù)據(jù)集可知,示波器眼圖模塊的數(shù)據(jù)集縱坐標最大值較眼圖算法計算的縱坐標值更大,且在等間距分布的橫坐標情況下,眼圖算法的相應縱坐標的分布更平緩,采集數(shù)據(jù)的差異性可能對測試結(jié)果產(chǎn)生一定影響[15]。
對照表2 中結(jié)果1 和結(jié)果2 可以看出,信號幅值的測量結(jié)果較接近,而眼圖的上升沿時間與下降沿時間數(shù)值結(jié)果1 較結(jié)果2 偏小。綜合分析以上測量結(jié)果差異,可能原因如下。
1)算法設計的信號采集模塊為NI板卡與無源探頭組合,對差分信號的處理為2 個無源探頭信號做減法得到,因此其信號損耗較差分探頭采集結(jié)果的信號損耗更大。
2)差分探頭輸入電容<1 pF,而無源探頭輸入電容為13 pF,導致信號測量差異較大。
3)泰克示波器與采用NI示波器板卡的儀器存在差異性。
將示波器采集的數(shù)據(jù)生成離線文件,并導入眼圖算法計算后獲得表2 中的結(jié)果3。結(jié)果3較結(jié)果2的值更接近結(jié)果1。
綜上,當上述算法與儀器儀表的硬件環(huán)境接近時,其軟件的計算結(jié)果也更加接近,因此可通過優(yōu)化硬件環(huán)境來提升算法可信度。若將上述算法用于LEU 設備功能測試,則可在同樣配置的硬件環(huán)境下獲得接近儀器儀表的計算結(jié)果,同時可通過擬合算法來補償算法與儀器儀表測量結(jié)果的差異[16],這樣不僅提高了生產(chǎn)測試的嚴謹度,同時也降低了成本。
4 結(jié)論
在LabVIEW 平臺上,通過離散數(shù)據(jù)點對LEU設備輸出的C1 信號眼圖及參數(shù)進行算法設計與實現(xiàn),并將軟件計算結(jié)果與泰克示波器的測量結(jié)果進行對比,得出可以通過優(yōu)化硬件環(huán)境得到接近標準儀器的計算結(jié)果;同時,通過多組計算對比可知算法計算結(jié)果穩(wěn)定,具有一定的可靠性,可根據(jù)具體應用環(huán)境對算法設計進行優(yōu)化。后續(xù)可在算法設計以及計算速度方面做進一步改善,提高算法的可靠性與實用性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
