基于交通小區短時交通生成預測的城市道路網短時動態交通預測研究?
2024-04-17 07:29:32沈玲宏王祉祈
計算機與數字工程 2024年1期
沈玲宏 趙 顗 王祉祈
(1.蘇州建設交通高等職業技術學校軌道交通工程系 蘇州 215009)
(2.南京林業大學汽車與交通工程學院 南京 210037)
1 引言
隨著智能化的推進,各國在針對緩解城市交通擁堵這一問題上提出不同解決方案。其中智能交通應用最為廣泛,其要求能夠準確預測實時的交通流,這對交通控制和交通誘導有重要促進作用,幫助管控人員提前了解道路交通變化狀況,及時給出主動管理方案[1],在提前發布路網狀態信息、識別交通擁堵瓶頸及調整信號控制方案等方面起到了重要作用[2]。
短時交通預測模型在近幾十年的研究進展中,根據模型理論基礎和引入平臺不同可將其分為基于統計分析的預測模型、基于非線性理論的預測模型、基于仿真的預測模型、基于知識發現的智能預測模型、基于混合理論的組合預測模型五大類[3~4]。楊高飛[5]提出ARIMA 和卡爾曼濾波組合模型,考慮兩模型具有一定的互補性,提高短時交通流預測的精度。王曉全[6]基于線性遞歸的ARIMA 模型和非線性遞歸的廣義回歸條件異方差-均值模型,提出了一種組合式短時預測模型。Zhang[7]將人工神經網絡模型應用于短時交通流預測中。Zhang[8]引入頻譜分析技術分析交通流周期性趨勢,使用ARIMA 模型與GJR-GARCH 模型混合的模型提高預測性能。Shang Qiang[9]提出奇異頻譜分析(SSA)和核極限學習機(KELM)的混合預測模型,使用SSA 對交通流數據降噪,再用消噪后的數據訓練KELM 模型,該組合預測模型性能優于著名的單個預測模型。
城市道路網的短時交通流受到路網結構、信號控制等多方面的影響,導致城市道路網短時交通的波動性較強,短時預測精度較低[10~11]。其中,交通小區的短時生成交通量是引發城市道路路網短時交通總量變化和波動性的根本原因。因此,本文對城市路網進行交通小區劃分,采集各交通小區的生成交通量,并對各交通小區生成交通量進行短時生成預測,結合動態交通分配實現路網短時交通預測。
2 數據采集及基本特征分析
根據高清卡口檢測設備采集到的卡口過車信息,獲取車輛的完整出行路徑和出行起終點,以15min 為周期統計連續八天每個交叉口的發生和吸引交通量。將每個交通小區內所有交叉口采集的數據匯總,得到每個交通小區連續八天每15min發生和吸引的交通量。
統計每個卡口采集到的交通量數據,經預處理后得到研究范圍內的每個交通小區的時間序列交通量,任選兩個交通小區采集到的交通量進行分析,如圖1、圖2所示。
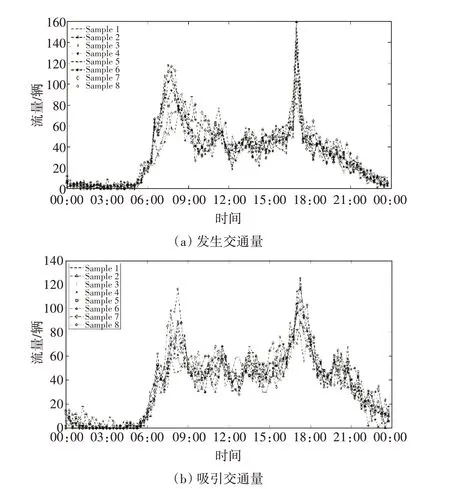
圖1 號交通小區發生和吸引交通量時間分布圖

圖2 號交通小區發生和吸引交通量時間分布圖
通過對連續8 天的交通量統計分析,可以發現交通量變化呈現明顯的周期性。1 號交通小區,發生交通量在7:30~8:30 出現早高峰,吸引交通量在17:00~18:00 出現晚高峰,與居民上班和下班時間相一致。2 號交通小區周圍為居住和教育用地,發生交通量在7:30~8:30 出現早高峰,15:30~17:00出現晚高峰;吸引交通量在7:00~8:30 出現早高峰,15:30~17:30 出現晚高峰,早高峰吸引交通量為發生交通量的1.7 倍,高峰時間持續較長與周邊教育用地錯峰放學相一致。
3 組合預測模型構建
3.1 基礎理論介紹
3.1.1 小波變換理論
小波變換以傅里葉變換為基礎,對函數或信號進行平移、縮放等操作,以獲得更好的信號特征信息[12]。現今小波分析被廣泛地應用于信號分解處理、圖像處理、語音識別等領域。常見的小波函數有Haar 小波、Daubechies 小波、Gaus 小波等。通過對比分析確定本研究采用Daubechies 小波,簡稱dbN。該小波具有較好的正則性,其特點是隨階次N 的增大消失矩階數越大,其中消失矩越高光滑性就越好,頻域的局部化能力就越強,頻帶的劃分效果越好,但是會使時域緊支撐性減弱,同時計算量大大增加,實時性變差。
3.1.2 神經網絡理論
神經網絡通過模擬人腦學習過程,進行分布式并行信息處理的抽象算法數學模型[13]。神經網絡種類主要包括BP 神經網絡、徑向基(RBF)神經網絡、感知器神經網絡等[14]。其中,BP 神經網絡又稱誤差反向傳播網絡,具有自學習、自適應的特點,能以任意精度逼近非線性關系,在神經網絡中應用廣泛,且BP 神經網絡是智能預測模型中較為成熟的預測方法[15]。因此,本文選用BP 神經網絡構建預測模型。
3.1.3 動態交通分配
動態交通分配模型是建立在已知城市交通需求狀態、出行行為和交通流理論的基礎上,用來描述和預測城市路網上的時變交通流的模型,不僅能描述OD需求矩陣隨時間變化的特征,還能更真實、準確地描述城市路網中各種交通流現象[16]。根據wardrop 原理,動態交通分配模型可分為動態系統最優模型和動態用戶最優模型。兩種模型分別從管理者和出行者的角度考慮,預測出行時間和出行費用最少的交通狀態[17~18]。
3.2 組合預測模型
根據組合方式的不同可將小波神經網絡分為順序式小波神經網絡和嵌入式小波神經網絡兩大類。其中順序式小波神經網絡通過設置不同的N值對交通小區的生成交通量進行分析,當N取值為4 時交通生成量可以獲得較好分解效果[19]。本文分別采用兩種不同組合方式的小波神經網絡對交通小區生成交通量進行短時預測,預測結果顯示嵌入式小波神經網絡的預測結果明顯優于順序式小波神經網絡的預測結果,且嵌入式小波神經網絡能夠適用于不同用地性質的交通小區,操作過程更為簡單。
因此,本文中選用嵌入式小波神經網絡組合預測模型對交通小區生成交通量進行預測,得到每個交通小區未來時間段生成交通量,并對小區預測的生成交通量進行均衡。將路網交通出行總量與動態交通分配模型相結合,利用Frank-Wolfe 算法求解動態交通分配模型。在求解過程中,外部循環為路段阻抗函數不斷更新的過程,內部循環為算法重復迭代的過程。利用F-W 算法求解路網動態分配模型的流程如圖3所示。
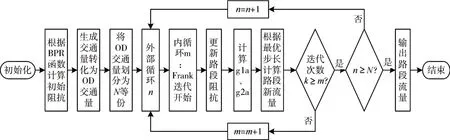
圖3 F-W算法求解動態交通分配模型邏輯圖
4 城市路網短時動態交通預測實驗
4.1 評價指標選擇
為更好地反映預測模型的準確性,本文將選用均方誤差(MSE)和平均絕對百分比誤差(MAPE)來計算真實值Yactual和預測值Ypredict之間的誤差。MSE和MAPE的具體表達式如下:
式中,MSE為均方誤差;MAPE為平均絕對百分誤差;Yactual、Ypredict為真實值和預測值;n為預測次數。
4.2 實驗參數設置
4.2.1 組合預測模型
為驗證在城市路網中采用F-W 算法求解動態用戶均衡模型的有效性,本文根據道路的實際情況進行城市路網建模,對路網中各路段屬性進行標定。為了便于觀察路網信息,對路網中交叉口和路段重新進行編號。
對選擇的路網區域進行交通小區劃分,將區域劃分為11 個交通小區,每個交通小區包含的節點號及早晚高峰時間段原始生成交通量如表1 所示。將11 個交通小區的生成交通量采用嵌入式小波神經網絡組合預測模型進行短時交通預測,均衡預測的小區生成交通量,采用F-W 算法求解動態用戶均衡模型,對城市路網中劃分的11 個交通小區的OD交通量進行交通分配。
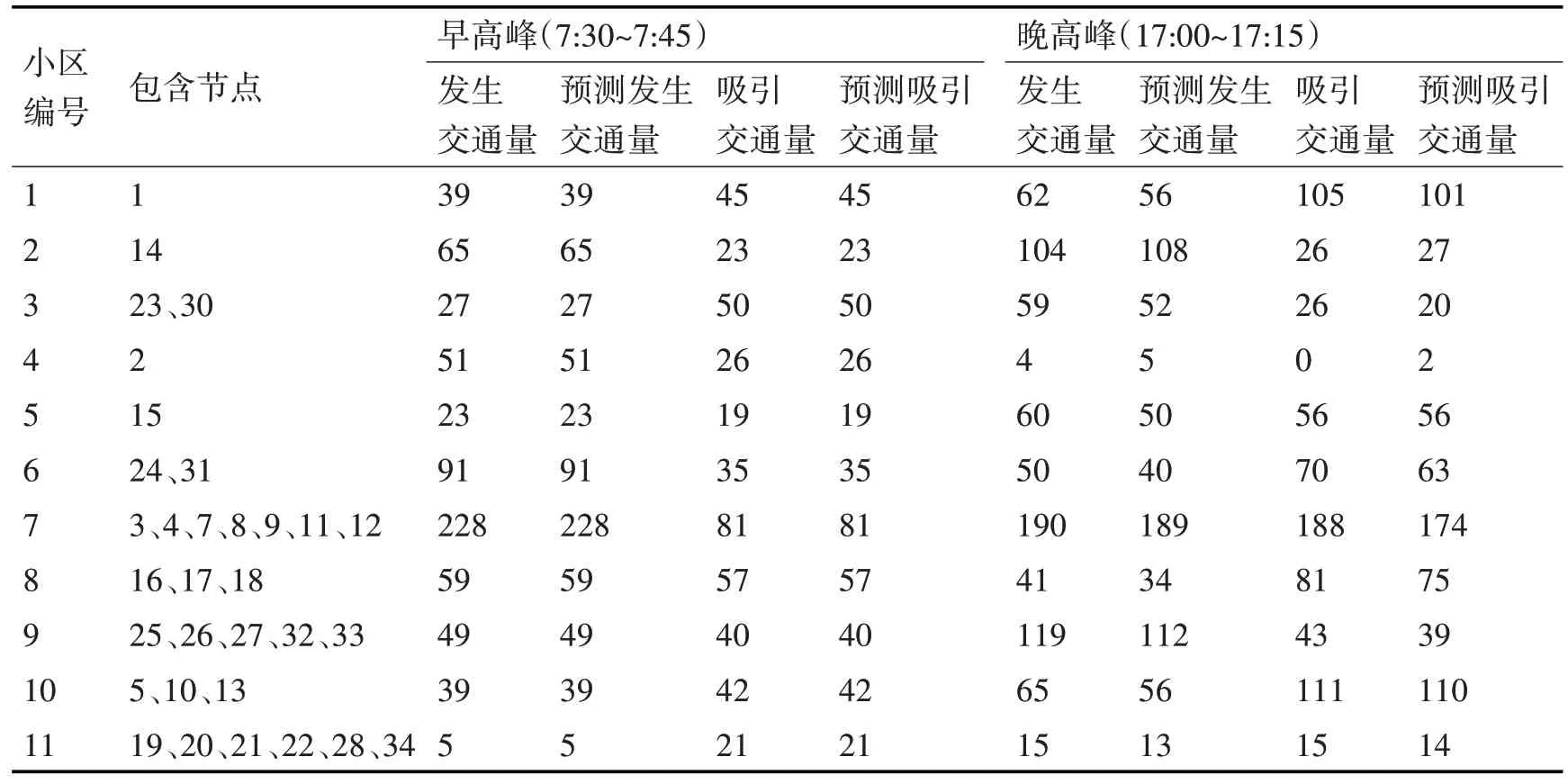
表1 交通小區節點及高峰時段原始生成交通量表
4.2.2 BP神經網絡
BP 神經網絡模型的結構包括輸入層、輸出層和隱含層。本文使用BP神經網絡預測城市路網短時交通流,主要設置的參數如下:
1)時間相關性設置:使用時間序列交通流預測方法,將預測時間段的前4 個時間段統計的交通流數據作為輸入數據。
2)隱含層及神經元數量設置:設置為一個隱含層,隱含層神經元數量通過訓練與測試確定最佳個數,設置神經元數量可變范圍為[5 ,15] 。
3)學習函數設置:對比篩選設置隱含層和輸出層傳輸函數為tansig,訓練函數為traingdx,權重學習函數為learngdm。
4)學習質量控制參數設置:訓練次數為1000,學習率為0.001,訓練目標誤差為1e-7。
4.3 實驗結果分析
4.3.1 組合預測模型預測結果分析
采用嵌入式小波神經網絡對11 個交通小區生成交通量進行短時預測,預測結果如表1 中預測發生和吸引交通量所示。將預測生成交通量進行交通分配,分別對城市路網中42 個主次干道路段的交通量進行統計,基于交通小區預測生成交通量分配結果統計的早晚高峰路段雙向交通流總和如表2和表3中分配交通量所示。
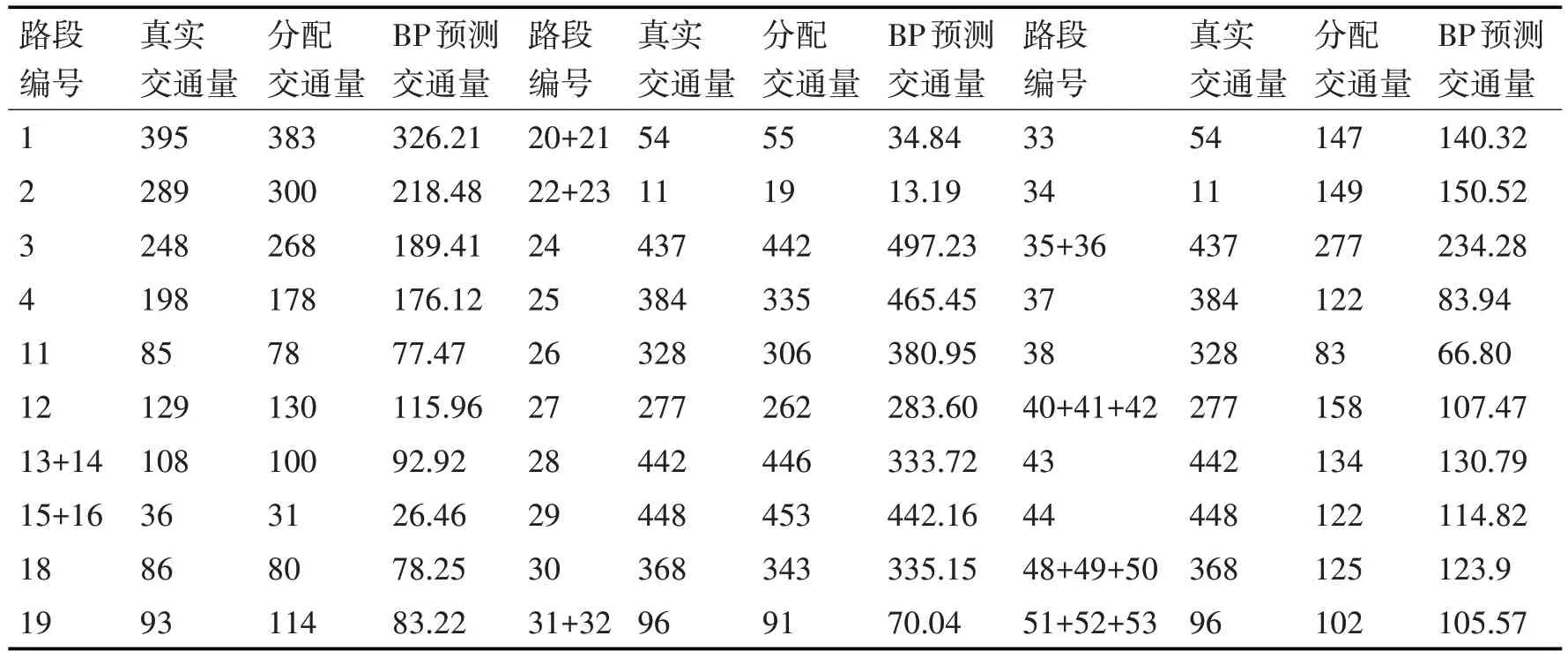
表2 7:30主次干道路段預測交通量
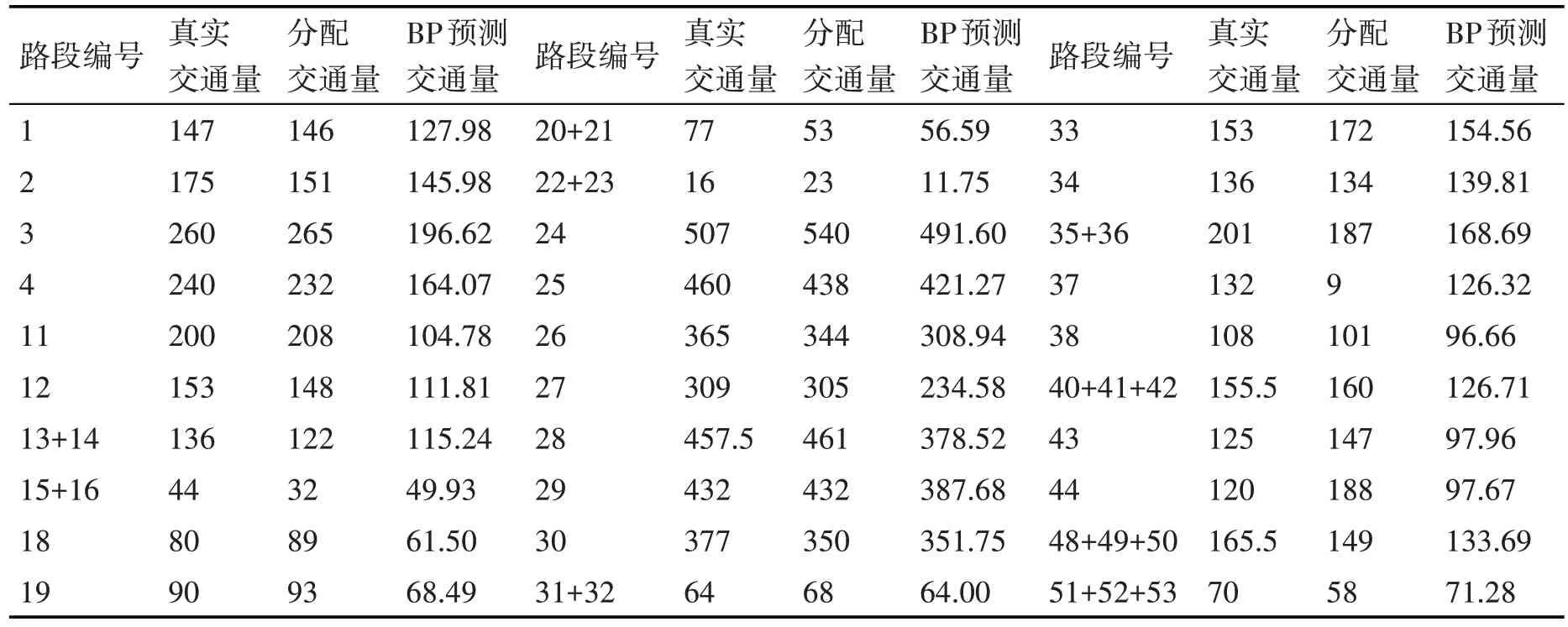
表3 17:00主次干道路段預測交通量

表4 交通小區原始/預測生成交通量分配預測結果
將路網中各路段分配得到的交通量與路段采集的真實交通量進行對比,提取路網交通量的預測精度。在早高峰時間段預測均方誤差為253.36,其精度可達90%;晚高峰時間段預測均方誤差相對較大為863.54,其精度相對較低為86%。
4.3.2 BP神經網絡預測結果分析
根據BP 神經網絡預測模型參數的設置,對路網中各路段數據進行建模分析。本文控制隱含層節點個數分別對路網中各路段的交通量進行訓練和預測,選擇預測精度最高的預測結果進行分析。路網中各路段在早晚高峰時間段預測結果如表2和表3中BP預測交通量所示。
4.3.3 預測結果對比分析
用兩種不同預測模型對城市路網進行短時動態交通預測。第一組預測模型是將交通小區的生成交通量采先用嵌入式小波神經網絡組合模型進行短時預測,再將預測的交通小區生成交通量使用動態交通分配模型進行分配,以此實現路網的短時動態交通預測;第二組預測模型是構建BP 神經網絡短時交通預測模型,將前七天的數據用來訓練模型,第八天的數據用于測試模型。采用兩種不同預測模型對路網交通量進行預測,早晚高峰時間段預測結果分別如圖4所示。
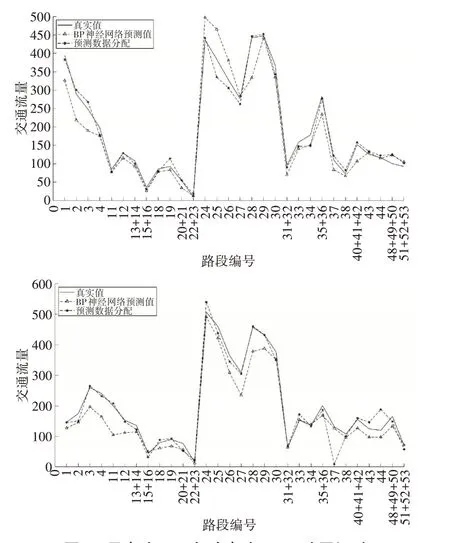
圖4 早高峰7:30與晚高峰17:00路網短時交通預測對比圖
5 結語
針對兩組不同的預測模型對城市路網進行了短時交通流預測,并結合早晚高峰時段路網短時交通預測結果,可以得出以下結論:
1)將交通小區生成交通量先進行短時預測,再將預測的小區生成交通量進行動態交通分配得到的預測結果比單獨依靠歷史數據使用BP神經網絡進行預測的精度要高。
2)以MSE 為評價指標,基于交通小區預測生成交通量的分配預測結果明顯高于BP神經網絡預測結果,最大提升幅度達到84%。
3)以MAPE 為評價指標,兩種分配預測精度均可達到80%以上,但基于小區預測生成交通量分配預測的精度較高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年8期)2021-07-28 05:56:04
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
書香兩岸(2020年3期)2020-06-29 12:33:45
數學物理學報(2020年2期)2020-06-02 11:29:24
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
光學精密工程(2016年6期)2016-11-07 09:07:19