基于FPGA 的磁懸浮軸承控制器設計
2024-04-20 17:09:42蘇曉通王文新李家樂王大朋
電子制作 2024年7期
關鍵詞:信號
蘇曉通,王文新,李家樂,王大朋
(沈陽工業大學,遼寧沈陽,110870)
0 引言
磁懸浮軸承是一種利用電磁力作用實現磁軸承轉子懸浮于空中的非接觸性磁軸承,定子和轉子之間無機械接觸,不存在機械摩擦。該軸承相較于傳統軸承具有無摩擦、低噪聲、工作時間長等優點,因此被廣泛應用于如鼓風機、空氣壓縮機等需要電機進行高速旋轉場合[1]。
數字控制系統是磁懸浮軸承控制器的核心,影響磁懸浮軸承穩定性,文本設計了以FPGA 為數字控制的主控芯片,實現位置環和電流環組成的一個雙閉環控制,采用三電平開關功率放大器驅動電磁線圈實現磁軸承懸浮的控制器。該控制器系統具有高度集成化和精準的控制精度,能夠實現磁懸浮軸承的靜態懸浮,具有較為良好的控制效果。
1 結構和工作原理
磁懸浮軸承主要是由磁軸承轉子、保護軸承、傳感器等組成。保護軸承不僅能夠對處于未懸浮時轉子時支撐作用,還能夠有效防止懸浮狀態時的轉子,發生意外跌落時與磁極發生碰撞。傳感器分為位移傳感器和電流傳感器,位移傳感器采用電渦流式傳感器,可以實時檢測轉子的位置,電流傳感器為電流互感器,主要檢測電磁鐵線圈內驅動電流大小。
本文中研究所用的磁軸承轉子具有五個自由度,分別為兩個前徑向、兩個后徑向和一個軸向自由度。從對磁懸浮軸承的控制方面來看,無論哪個自由度,其工作原理都是類似的,可以將整個磁懸浮軸承控制看成對五個獨立的單自由度系統的控制。圖1 為單自由度磁懸浮軸承工作原理。安裝在轉子兩側的差動傳感器將轉子的位置偏移信號轉換成對應的電壓信號,并通過傳感器板處理后輸入到控制器內,控制器將采集到的位移信號與設定的參考位置所對應的位置信號進行處理。控制器處理后會輸出相對應的控制電流信號,該信號能夠控制功率放大器進行電流信號的放大,一組功率放大器將所需要的不同的驅動電流輸入到上下兩路電磁線圈中,當有電流流過電磁鐵所纏繞的線圈中,電磁線圈會產生一定的電磁力,在電磁力的作用下轉子被托舉懸浮于指定位置[2]。因此控制器需要對五自由度的十路線圈進行精準、高速的同步控制,才能使軸承轉子穩定懸中間位置。

圖1 單自由度磁懸浮軸承工作原理
2 硬件電路設計
本文實驗的控制對象為五自由度磁懸浮軸承,圖2 為FPGA 控制器硬件電路總體設計,磁懸浮軸承控制器硬件主要是由傳感器模塊、主控模塊、隔離和功率放大模塊組成[3]。
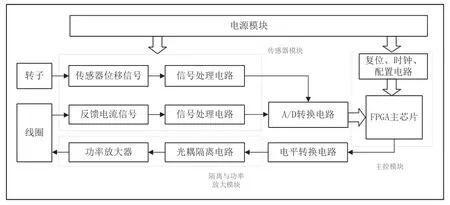
圖2 FPGA 控制器硬件電路總體設計
對于軸承轉子而言,其變化量為位移信號,不便于檢測,因此需要通過位移傳感器來檢測其位置的變化量,位移傳感器采用差動傳感器將位移變化量轉換成電壓值的變化量,對于線圈中反饋的電流信號通過電流互感器檢測,通過示波器觀察。這些檢測到的模擬信號經過調理、濾波、限幅等信號處理后,輸入到AD 芯片中進行模數轉換。將轉換后的數字量輸入到FPGA 芯片進行相對應的控制算法處理后,在FPGA 內部產生相位差為180 度的三角波,通過與處理過的信號進行比較斬波,使得FPGA 直接輸出所需的具有一定占空比的PWM 驅動波。又因為FPGA 芯片自身I/O 口的驅動能力較弱,因此該驅動波還需經過電平轉換電路,提高其電流驅動能力后輸出到光耦隔離模塊。通過光耦隔離電路,將驅動強電與控制弱電相互隔離,起到保護作用,最后控制信號PWM 波將控制功率放大器主電路中IGBT 的通斷,使電磁線圈產生可控電磁力托舉轉子懸浮。電源模塊為上述所有硬件電路提供所需的電源[4]。
FPGA 選用EP4CE10F17C8N 作為主控芯片,作為Cyclone 系列第四代其具有較為豐富的內部資源、強大的并行處理能力和較低功耗等優勢。A/D 采樣芯片AD7606,該芯片是一款16 位逐次逼近型AD 芯片,能夠進行8 通道的輸入。
控制器的電源模塊由±15V 供電開關電源提供,開關電源的供電由外部220V 交流電提供,對于芯片所需低電壓,則通過低壓線性穩壓器LDO 芯片穩壓后經過濾波后提供。
位移傳感器采用差分式電渦流傳感器,采用定頻調幅式電路。電流互感器采用霍尼韋爾CSNE151-100,匝數比為1:1000,將驅動電流縮小1000 倍后的反饋電流通過同向比例運算放大器放大后,輸入到A/D 采樣芯片。反饋電流采樣電路原理圖及其仿真如圖3 所示。
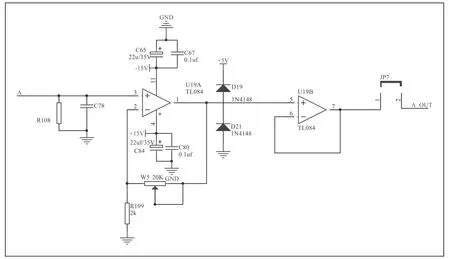
圖3 反饋電流采樣電路原理圖
本文選用的光耦隔離芯片是東芝公司TLP350F,能夠起到強弱電隔離和增強PWM 波驅動能力的作用,能夠滿足設計要求。
功率放大器采用三電平半橋式電路,由兩組IGBT 和大功率可恢復二極管組成[6]。如圖4 所示,其中Q1 和Q2 為功率開關管,D1 和D2 為大功率續流二極管。控制器產生相位差為180°兩組驅動波PWM1 和PWM2,能夠實現電流的雙向流動,能夠使電路工作在以下三種狀態:增加驅動電流狀態、二極管續流狀態、減小驅動電流狀態。
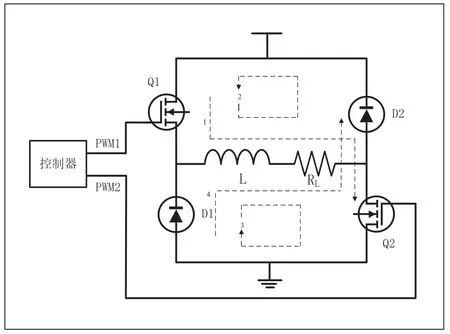
圖4 半橋式開關功率放大器結構
3 控制方法和軟件設計
FPGA 軟件部分主要由位置的不完全微分PID 控制,電流的抗積分飽和PI 控制及PWM 脈寬調制控制波等組成。
3.1 抗積分飽和PI
電流控制是根據轉子位置控制輸出實時控制線圈電流,保證控制環路穩定,提高響應速度。為防止PI 調節后積分飽和,抗積分飽和PI控制[5],其原理如圖5 所示。
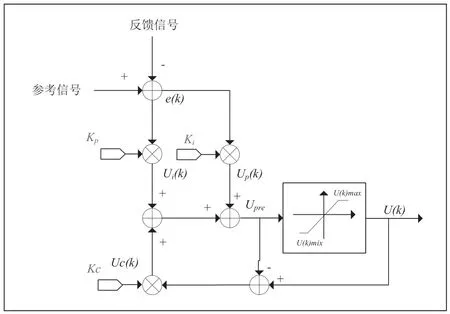
圖5 抗積分飽和PI 電流控制圖
抗積分飽和PI 控制算法為:
PI 控制離散后算法表達式:
抗積分飽和表達式:
積分飽和限幅調節之前的輸出:
抗積分飽和算法表達式:
其中Kp為比例系數,Ki為積分系數,Kc為抗積分飽和修正系數,反饋信號為電流傳感器的電流反饋信號與固定偏置電流的和,參考信號為轉子處于中間位置時與位移傳感器差值信號,e(k)為參考信號和電流反饋信號的差值,U pre(k)為加入抗積分飽和后的輸出,需要對U pre(k)進行限幅,當使得輸出U(k)被限制在Umin和Umax范圍內,避免控制量長時間停留在飽和區。
3.2 PWM 脈寬調制
主功率電路的驅動采用三電平脈寬調制驅動,每個自由度需4 路PWM 驅動波。脈寬調制采用三角載波PWM 調制,需要三角波由FPGA 通過直接數字式頻率合成器(DDS)產生,為滿足開關管的開關頻率不低于功放截止頻率的10倍,選擇的三角載波頻率為20kHz。將PI 運算的信號與對稱式三角載波進行比較產生開關功放的驅動信號,利用Modelsim 進行仿真驗證,單自由度所需驅動波如圖6 所示。

圖6 單自由度PWM 驅動波
3.3 不完全微分PID
磁懸浮軸承位置控制是控制轉子懸浮到指定參考位置,實際的控制中通常采用PID 控制方法,但由于該種控制方法中微分環節系數較大,對高頻噪聲很敏感,因此使用不完全微分PID 進行算法改進,即在傳統PID 的微分環節后加入一個一階慣性環節(低通濾波器),用于過濾高頻信號,抑制高頻噪聲信號對微分作用的影響,改善系統性能,增強系統穩定性[6]。
在FPGA 中不完全微分PID 控制算法使用并行結構,相比于串行結構能夠有效地提升運算速度,圖7 為不完全微分PID 的并行算法。

圖7 不完全微分PID 并行結構
其中e(k) 為信號偏差,Kp、Ki、Kd1、Kd2為PID 的控制系數,REG 為寄存器,用于存放前一個時鐘所產生的數據。用Verilog HDL 語言實現不完全微分PID 算法,共需要調用6 個加法器和4 個乘法器來實現。由于FPGA 無法直接處理小數,因此需要先將用小數通過浮點運算IP 核轉換成浮點數進行運算,最后將浮點數重新轉換成小數。
4 硬件功能測試
為了驗證控制系統各個部分功能模塊的性能,需要對系統主控、傳感器、隔離和功率放大器等硬件進行測試。
對主控采樣模塊的測試,信號發生器給A/D 模塊輸入0~5V,頻率為1kHz 的正弦波,FPGA 采樣頻率為200kHz,使用SignalTap 抓取波形,驗證采樣程序是否正常工作。
電渦流傳感器采用差動檢測方法,在進行位置采樣前,需要對位移傳感器進行區間校正。將對稱一組線圈分別依次打開,使轉子分別吸合到一側,調節偏置電位器,使得輸出電壓分別為0V 和5V,因此當轉子穩定懸浮于中間時,輸出電壓為2.5V。
隔離與功率放大器的測試,使用可調變壓器給母線施加電壓20V 直流電,并串聯大功率電阻負載,模擬電磁線圈。用信號發生器輸出2 路相位差為180 度,占空比為55%PWM 波,模擬懸浮時的控制器輸出波形。
5 控制器性能測試
當轉子處于未懸浮狀態時,此時轉子在重力影響下落于保護軸承上,位于上下兩端的位移傳感器與軸承間隙值最大或最小。若要進行轉子的起伏,所需電流較大,為避免轉子進行起伏時出現大電流沖擊,驅動電流需要緩慢的增大,同理下降過程需要電流緩慢減小。磁懸浮軸承的位移量轉換為電壓信號通過示波器觀察,單自由度磁懸浮軸承起伏波形如圖8 所示。
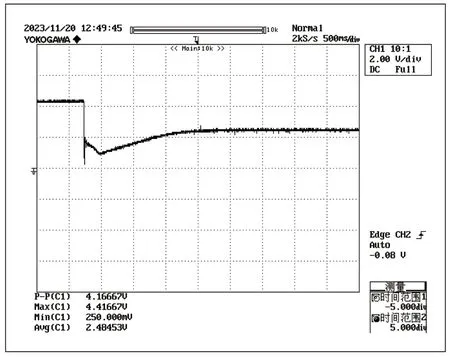
圖8 單自由度磁懸浮軸承起伏
當磁懸浮軸承轉子穩定懸浮時,記錄轉子位移偏量,靜態懸浮時轉子位移波形如圖9 所示。
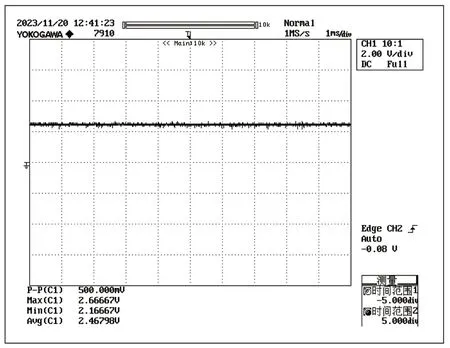
圖9 靜態懸浮時前徑向轉子位移信號
由上述波形圖可知,控制系統可以令轉子穩定懸浮,懸浮時位移傳感器電壓信號的平均值為2.46V,可以判定轉子基本懸浮于中間位置(中間位置電壓信號為2.5V),位移信號的峰峰值(Pmax-Pmin)為500mV,表明此時轉子的位移變化量約為30μm(16.67mV/μm),位移波動量小于保護軸承間隙內(-0.15mm~0.15mm),因此本文設計的控制器可以滿足轉子在空載狀態下的穩定懸浮。
6 結論
本文設計了一種基于FPGA 的磁懸浮軸承控制器,驗證了控制器采用雙閉環控制策略的可行性。實驗證明FPGA 為控制核心的控制器可以實現磁懸浮軸承的穩定懸浮,表明該實驗表明控制器具有較好的控制性能。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06