工業(yè)機器人控制中的迭代滑膜控制應(yīng)用研究
2024-04-24 05:23:30韓洋祺胡競張亮
客聯(lián) 2024年1期
韓洋祺 胡競 張亮

摘要:工業(yè)機器人的應(yīng)用需求不僅要求高度的靈活性、穩(wěn)定性、快速性和準(zhǔn)確性,還要求可以人機交互和外部外境感知等。
關(guān)鍵詞:工業(yè)機器人;迭代滑膜;控制應(yīng)用
隨著科技的不斷進(jìn)步,人類社會的需求不斷提高,工業(yè)機器人的應(yīng)用需求不僅要求高度的靈活性、穩(wěn)定性、快速性和準(zhǔn)確性,還要求可以人機交互和外部外境感知等。同時多變和復(fù)雜的工作環(huán)境要求工業(yè)機器人的控制技術(shù)不斷改進(jìn),傳統(tǒng)的控制策略已經(jīng)很難達(dá)到高精度、高性能的條件,因此需要更為先進(jìn)的控制技術(shù)來提高系統(tǒng)的控制效果。
以多關(guān)節(jié)工業(yè)機器人為研究對象,在單關(guān)節(jié)位置跟蹤控制策略研究部分,設(shè)計了一種基于RBF神經(jīng)網(wǎng)絡(luò)的迭代滑模控制策略,提高了系統(tǒng)的控制精度、關(guān)節(jié)運行速度,以及降低了系統(tǒng)抖振。
為驗證基于RBF神經(jīng)網(wǎng)絡(luò)的迭代滑模控制策略的有效性,實驗仿真對象為二關(guān)節(jié)工業(yè)機器人,并采用MATLAB進(jìn)行仿真分析。
圖1為滑膜控制(策略一)、迭代滑模控制(策略二)和RBF神經(jīng)網(wǎng)絡(luò)迭代滑模控制(策略三)第10次迭代的位置跟蹤曲線。可以看出基于RBF神經(jīng)網(wǎng)絡(luò)的迭代滑模控制策略具有更好的軌跡跟蹤性能。
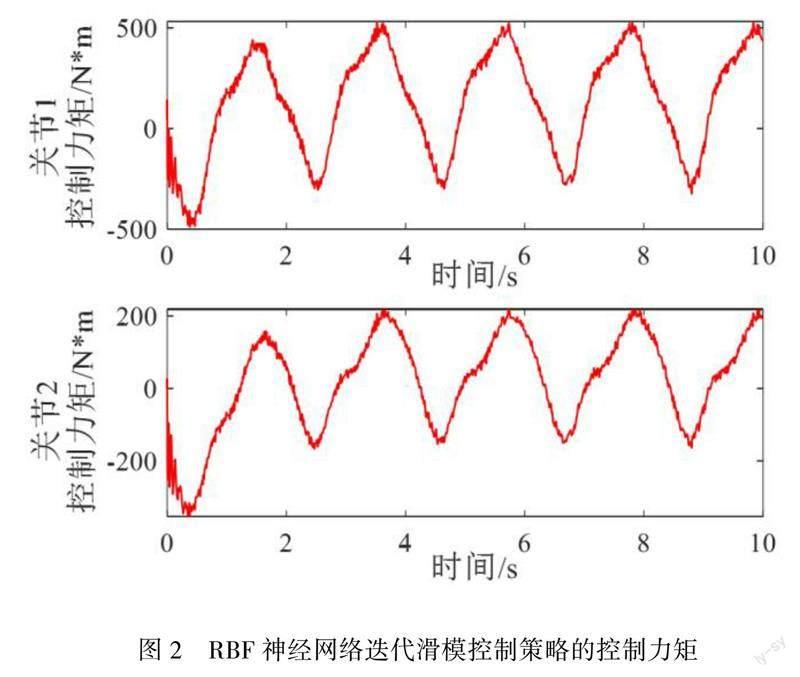
由圖2得到RBF神經(jīng)網(wǎng)絡(luò)迭代滑模控制策略的控制力矩抖振比較強烈,初始控制力矩較小。
說明RBF神經(jīng)網(wǎng)絡(luò)迭代滑模控制策略雖然使得工業(yè)機器人的關(guān)節(jié)控制力矩的抖振現(xiàn)象增大,但是降低了關(guān)節(jié)位置誤差和速度誤差,提高了工業(yè)機器人的控制精度和關(guān)節(jié)運行速度。
課題項目:本文來源于重慶建筑科技職業(yè)學(xué)院2023年校級科研項目:工業(yè)機器人控制中的迭代滑膜控制應(yīng)用研究(編號2023021)。