液控液驅水平井測井牽引器設計與仿真
2024-04-24 06:33:42周渟秦彥斌王健李楊棟郭忠原趙朕浩
石油工業技術監督 2024年4期
周渟,秦彥斌,王健,李楊棟,郭忠原,趙朕浩
西安石油大學機械工程學院(陜西 西安 710065)
0 引言
水平井測井作業能準確獲取地層信息,有助于制定合適的開發策略,優化采收過程,提高油氣產量和采收率。然而在測井時,由于電纜無法提供鉆壓,測井工具串無法自主下入到較深的水平井段,井下牽引器技術作為一種創新舉措,能有效解決井下工具串因為重力限制無法順利輸送到預定位置的難題[1]。國外公司如Welltec、Smartract、Schlumberger、Sondex 和Omega 等[2]研發了多款井下牽引器。王金超[3]、鄭杰等[4]基于流體力學原理,設計了以液壓驅動的牽引器;針對牽引器的支撐機構,Yang等[5]提出基于單向自鎖機構推進原理的雙邊可控自鎖機構;劉清友等[6]提出基于斜面自鎖原理的雙向鎖止機構;白相林[7]和張勇等[8]對牽引器的驅動模塊進行優化設計,以提高其適應性并實現大牽引力作業要求;彭漢修等[9]針對伸縮式井下機器人的液壓控制系統進行了仿真分析。目前,由于井下高溫高壓環境和井眼尺寸小等因素,大多數牽引器難以提供較大的牽引力[10-13]。本文設計了一款基于油液體積補償與液壓平衡原理的液壓驅動伸縮式牽引器,采用液壓平衡回路,牽引器在井下任意深度爬行時牽引力不因環境壓強增加而減小;基于體積補償原理,不因深井中環境溫度的增加而加大油箱壓力,保證牽引力的穩定輸出;選用直流無刷浸油式電機和柱塞泵作為牽引器的動力源,采用等功率控制模式,負載大、轉速低、流量小,保證牽引器能在139.7 mm 套管中穩定爬行,并提供7 500 N 的牽引力。
1 牽引器系統組成
牽引器在井下工作時需要有較強的井眼適應性,在滿足井下大牽引力作業的要求下,能穩定牽引電纜及測井工具串,表1 給出了牽引器的設計性能指標。本文牽引器整體采用伸縮式設計,液壓驅動與液壓控制,結構簡單、徑向尺寸小,適應井下高溫高壓環境能力強,由牽引短節、液壓動力短節和電控短節3部分組成。牽引短節由前后結構完全相同的兩組支撐組件串聯組成,作為牽引器的執行機構,同時起到扶正作用,是牽引器的運動核心。液壓動力短節由流體控制模塊與油箱動力模塊兩部分組成,作為動力源存儲液壓油,是牽引器的動力核心。電控短節集成了電源、控制電路和參數采集等多個功能模塊,是牽引器的控制核心。牽引器的整體結構組成如圖1所示。

圖1 牽引器系統組成
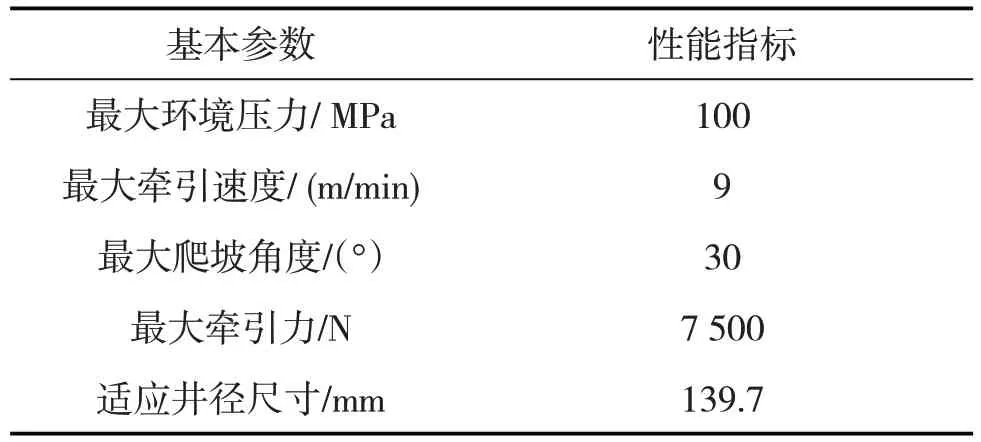
表1 牽引器性能指標
1.1 牽引短節結構設計
圖2 為牽引短節裝配示意圖。牽引短節兩組支撐組件串聯,主要由殼體、心軸、活塞和支撐塊組成。心軸與殼體聯成一體,內部由許多液壓油路貫通,運動活塞套在心軸和殼體之間,支撐組件套在運動活塞上與其固聯,可以獨立控制運動活塞和撐腳活塞的動作。支撐組件采用3 組支撐塊周向360°均勻分布,具有良好的定心效果,同時通過高壓液壓油推動撐腳活塞,使支撐塊張開并與井壁緊密貼合,為牽引器運動提供穩定支撐。如果高壓液壓油先注入后運動活塞液壓缸,再注入前運動活塞液壓缸,則牽引器向前爬行;反之若先注入前運動活塞液壓缸,再注入后運動活塞液壓缸,則牽引器向后爬行。

圖2 牽引短節裝配圖
1.2 液壓動力短節結構設計
液壓動力短節是牽引器的動力核心,由流體控制模塊與油箱動力模塊兩部分組成。
1.2.1 流體控制模塊結構設計
圖3為流體控制模塊裝配示意圖。流體控制模塊主要由各種控制閥及液壓油路構成,是牽引器的液壓控制樞紐。所用控制閥均為微型插裝閥,定值泄壓閥3的最大控制液壓為0.6 MPa,定值泄壓閥13的最大控制液壓為5 MPa,定值泄壓閥14 的最大控制液壓為12 MPa;以通過電磁閥的小流量液壓油控制液控閥通斷,液控閥控制大流量液壓油路通斷,達到“以小控大”的目的,實現液控液驅。電磁閥通過導線連接到電控短節的控制中心,根據程序指令來控制閥的開閉,將高壓液壓油輸送到液壓缸,實現牽引器的執行動作。
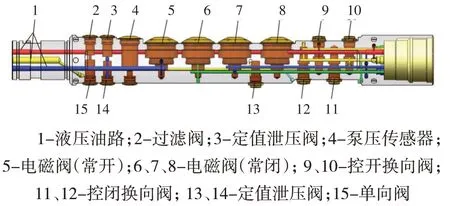
圖3 流體控制模塊裝配圖
1.2.2 油箱動力模塊結構設計
圖4 為油箱動力模塊裝配示意圖,主要包含機泵管組件與液壓平衡筒。機泵管組件處在油箱內,由潛油電機、導油管和柱塞泵組成。潛油電機采用等功率控制模式,將電能轉化為液壓能,通過柱塞泵為牽引器爬行提供動力。液壓平衡筒由平衡套筒、彈簧、連通管和活塞組成,用于平衡系統壓力以提高牽引器的適應性和穩定性。其中彈簧通過連通管用于保證油箱內壓略大于環境壓力,活塞在套筒內做直線往復運動,使平衡套筒內的壓力與外界壓力相接近,起到平衡壓力的作用,并補償油箱內被損耗的液壓油液。
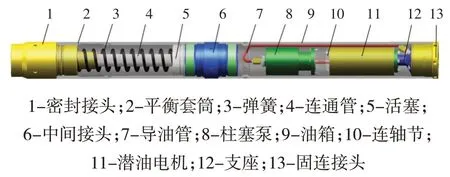
圖4 油箱動力模塊裝配圖
1.3 電控短節結構設計
圖5為電控短節裝配示意圖,牽引器電控短節主要包含牽引接頭、磁定位器、伽馬探測器以及控制電路板。牽引接頭將電纜或測井工具串有效連接在牽引器上,磁定位器用來確定牽引器在井下的位置,伽馬探測器是一種輻射探測設備,以獲得地層信息,評估地下巖層、礦藏的性質、成分等[14-15]。電控短節采用集成控制系統方式,選用AT89C52單片機對控制閥的線圈進行控制,利用壓力和位移傳感器來反饋牽引短節的實際運動情況,以便及時做出相應的調整。

圖5 電控短節裝配圖
1.4 工作原理及運動過程
圖6為牽引器液壓原理示意圖,圖7 為牽引器的牽引短節運動步驟示意圖。牽引器從井口依靠自重下入井中,當其無法靠自重下入時,則通過地面控制系統對牽引器進行操作,液壓系統工作流程如下:
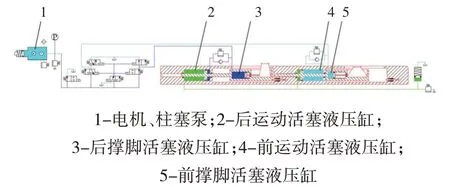
圖6 液壓原理示意圖
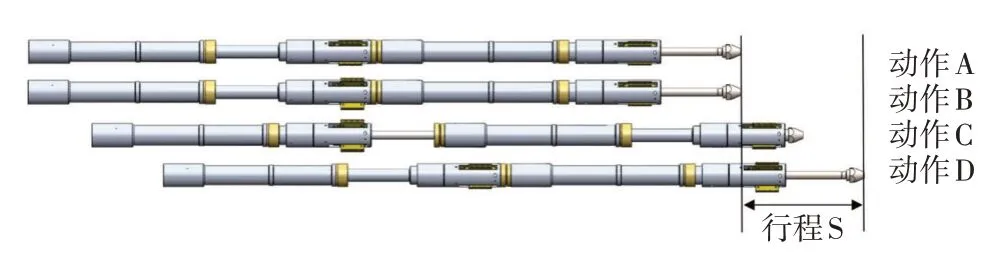
圖7 牽引短節運動步驟示意圖
1)啟動系統,牽引器處于就緒狀態,即動作A狀態。
2)控制系統發出指令,控閉換向閥接通,液壓油注入到后撐腳活塞液壓缸,使后支撐組件張開并貼緊井壁,即動作B狀態。
3)檢測后支撐塊與井壁間的壓力,當支撐力達到要求時,泄壓閥14 接通,液壓油注入到后運動活塞液壓缸使后運動活塞伸出,牽引器向前爬行一次,即動作C狀態。
4)控開換向閥接通,液壓油注入到前撐腳活塞液壓缸使前支撐組件張開。
5)檢測前支撐塊與井壁間的壓力,達到要求后,控閉換向閥斷開,后支撐組件收回,同時泄壓閥14斷開,液壓油注入到前運動活塞液壓缸使前運動活塞伸出,牽引器向前移動一次,即動作D狀態。
6)以上動作為一個運動周期,牽引器爬行S 的距離,循環運動,直到牽引器爬行到指定位置。
2 牽引器力學分析
牽引力大小是衡量牽引器性能的重要標準,牽引器的最大牽引力與支撐塊和管壁之間的摩擦力有重大關系,摩擦力應大于負載力(主要包括牽引物體的質量以及與套管的摩擦力)。由于支撐塊沿周向360°均勻分布成3 組,故以單個支撐塊組件為研究對象進行受力分析,如圖8所示。

圖8 支撐組件受力簡圖
易知桿AD、BC和CE均為二力桿件,有:
式中:FA1為前支撐塊在y軸方向的反力,N;FA2為前支撐塊在x軸方向的反力,N;FB1為后支撐塊在y軸方向的反力,N;FB2為后支撐塊在x軸方向的反力,N;N1為支撐反力,N;Fd為撐腳活塞產生的推力,N;α、β為支撐腿與水平軸線的夾角,(°);
對DC桿進行受力分析,如圖9所示:
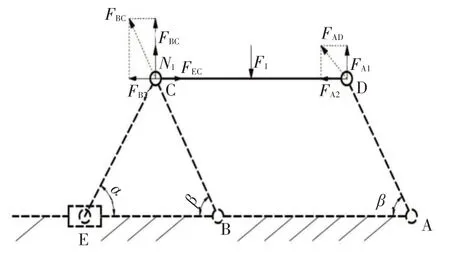
圖9 DC桿受力簡圖
對DC桿列平衡方程有:
式中:F1為支撐塊的支撐力,N;Fx為DC 桿在x軸方向的合力,N;Fy為DC 桿在y軸方向的合力,N;MD為DC 桿在D 點的合力矩,N/m;N1為支撐反力,N;LDC為支撐塊長度,m;LDF為桿受力點到D 點的距離,m;
由式(1)、式(2)整理得:
式(3)為推力Fd和支撐力F1的關系式,當支撐塊與井壁不發生相對滑動、支撐力不變時,所需的推力隨α和β的增大而減小。
取f為摩擦系數,W為總負載力,有:
液壓缸產生的推力大小由柱塞泵工作壓力決定:
式中:D為液壓缸缸筒直徑,mm;d為液壓缸活塞桿直徑,mm;P為柱塞泵的液壓力,Pa;
由式(3)至式(5)整理得:
式(6)為柱塞泵工作壓力與負載的關系式,給定液壓缸結構參數D、d及摩擦系數f,就能確定柱塞泵工作壓力與負載的關系。以牽引器在139.7 mm 套管工作的情況下,選定D=66 mm,d=50 mm,α=30°,β=30°,摩擦系數f=0.15,此時,當負載為7 500 N 時,所需的柱塞泵壓力為9.9 MPa。
柱塞泵性能參數見表2。最高工作壓力為12 MPa,理論上所能提供的最大負載為9 089 N,計算出不同泵壓下的負載,如圖10所示。
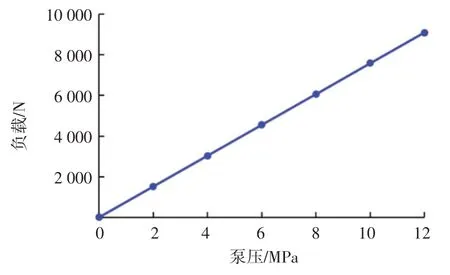
圖10 泵壓與負載的數值關系圖
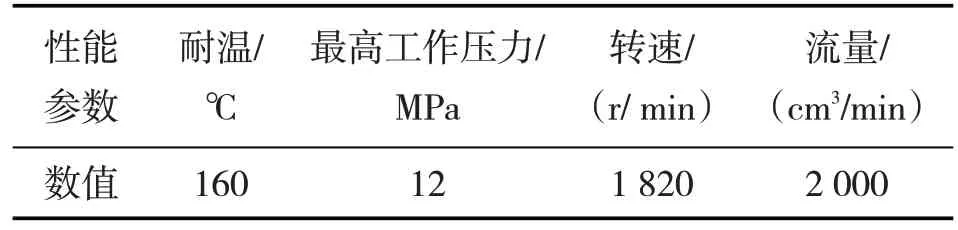
表2 柱塞泵性能參數
3 牽引器動力學仿真與分析
有限元方法是一種高效的數值模擬分析技術,能夠有效分析支撐塊與套管接觸時的工作情況,并直觀地展示支撐塊的受力狀態。使用SolidWorks軟件對支撐塊與套管進行建模,支撐塊齒形選擇45°齒形[16],設置好接觸關系,將模型導入ANSYS Workbench 有限元分析軟件進行數值模擬分析,圖11 為牽引器支撐鎖止機構。
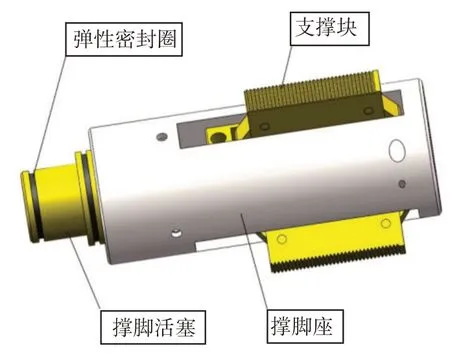
圖11 牽引器支撐鎖止機構
3.1 有限元分析前處理
設定材料屬性,選擇具有高強度與韌性的35CrMo作為支撐塊材料,42CrMo作為套管材料,相關力學參數見表3。

表3 材料的力學參數
劃分網格,將牽引器支撐鎖止機構中的一組支撐塊導入ANSYS 軟件中,建立有限元分析模型,利用自動網格生成功能劃分網格,同時因為支撐塊與套管貼合處存在應力集中,對支撐塊進行局部網格細化,為避免結果的偶然性,進行網格無關性檢驗,最終有限元模型被劃分為79 112 個單元,網格質量為0.976 55,劃分情況如圖12所示。
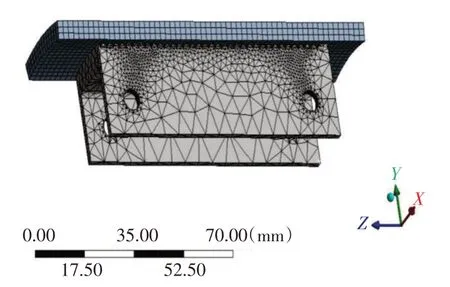
圖12 網格劃分圖
設置邊界條件,設置支撐塊與套管為面面接觸,接觸屬性設置為Frictional,摩擦系數0.15,采用增強拉格朗日算法,其余參數保持默認值。對套管施加固定約束,根據式(3)求解結果,對支撐塊施加14 434 N的力。
3.2 支撐鎖止機構有限元模擬計算
圖13 為支撐鎖止機構中支撐塊與套管受力的有限元模擬計算結果,支撐塊與套管內壁深度貼合,支撐塊最大等效應力為356.78 MPa,套管內壁最大等效應力為87.42 MPa,支撐塊與套管的等效應力都小于各自的屈服強度,可以安全使用。
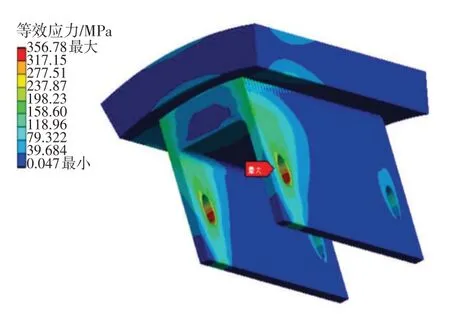
圖13 等效應力云圖
3.3 支撐鎖止過程動力學仿真
為驗證牽引器的合理性,采用Adams 虛擬樣機技術進行分析評估。首先進行三維建模并設置裝配關系,將模型另存為Parasolid 格式并導入Adams軟件中,接著對牽引器進行剛體定義、設定材料種類并添加相應約束與力。
圖14 為牽引器支撐塊速度變化圖,3 個支撐塊以相同速率伸出支撐,這表明牽引器的結構設計合理且密封效果良好,各支撐塊在0.025 s內從4.5 m/s減速為零,說明支撐塊能夠緊密貼合井壁并實現鎖止。
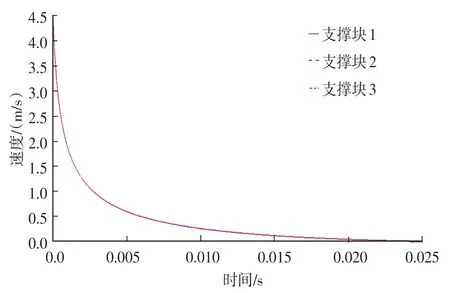
圖14 各支撐塊鎖止過程速度變化曲線
建立仿真環境,在牽引接頭處通過彈簧與大地建立連接,設置彈簧的彈性系數K=100 N/mm,通過測試彈簧所受到的拉力來測量牽引器的牽引力,結果如圖15 所示。牽引器的最大牽引力可以達到9 453 N,在0.07 s后彈簧維持在基本穩定狀態,此時的力即為牽引器的牽引力,大小為7 849 N。虛擬仿真牽引力稍高于實際情況,這是因為仿真模型與實際情況存在輕微差異,但仿真結果與理論力基本一致,驗證了設計的合理性。

圖15 牽引力仿真曲線
3.4 牽引短節運動仿真
由于牽引器整體尺寸較長,為更好地顯示運動過程,在SolidWorks 軟件中對牽引短節在井下水平段進行運動仿真,對前后運動活塞與撐腳活塞添加線性馬達,作為源動力輸出。仿真運動過程如圖16 所示(紅色框內為支撐機構放大示意圖),仿真結果與1.4 節假設基本一致,說明設計合理,運動可靠。
4 結論
1)通過對牽引器工作環境及作業要求的研究,設計采用液壓平衡回路,使牽引器在爬行時牽引力不因環境壓強增加而減小;采用體積補償原理,不因深井中環境溫度的增加而加大油箱壓力,保證牽引力的穩定輸出;應用SolidWorks 軟件完成了牽引器的三維建模,對牽引短節進行了運動仿真,證明了牽引器設計合理,運動可靠。
2)建立了牽引器支撐機構和驅動機構力學模型,推導了牽引力計算公式,當支撐塊與井壁不發生相對滑動、支撐力不變時,牽引力隨柱塞泵泵壓的增加而增大。
3)采用Ansys軟件分析了牽引器支撐鎖止機構與套管的接觸應力,運用Adams 軟件建立牽引器的虛擬樣機,進行動力學仿真分析,驗證了設計的合理性。結果表明:在139.7 mm 套管中,牽引器能穩定提供7 500 N的牽引力。