
花生半喂入聯合收獲二次清選機構研究
2024-04-27 16:44:40李冬杰王東偉何曉寧左百強張春曉李緒
中國農機化學報 2024年3期
李冬杰 王東偉 何曉寧 左百強 張春曉 李緒
摘要:針對目前半喂入花生聯合收獲機其清選環節存在清選損失率高、莢果含雜率高等問題,基于花生一次清選后花生莢果破損機理,設計一種二次清選裝置,主要包括輸送鏈、柵條篩、篩架、液壓缸、滑土板,并確定該裝置的基本參數。通過ADAMS軟件分析,建立清選過程中花生與裝置碰撞模型,確定以篩子轉速、篩子安裝高度、篩子傾角為主要影響因素,并針對“宇花14號”花生品種進行試驗研究。結果表明:篩子安裝高度為29 cm、篩子轉速為147 r/min、篩子安裝角度為19°,對應的莢果含雜率為1.65%、清選損失率為1.37%。試驗結果表明,應用該裝置的兩壟四行花生聯合機作業效果明顯提高。
關鍵詞:花生;聯合收獲;半喂入;二次清選;ADAMS
中圖分類號:S226.5? 文獻標識碼:A? 文章編號:2095-5553 (2024) 03-0117-09
Study on secondary cleaning mechanism of peanut semi feeding combined harvest
Li Dongjie, Wang Dongwei, He Xiaoning, Zuo Baiqiang, Zhang Chunxiao, Li Xu
(School of Mechanical and Electrical Engineering, Qingdao Agricultural University, Qingdao, 266109, China)
Abstract:
In view of the problems of high cleaning loss rate and high impurity content of pod in the cleaning process of half feeding peanut combined harvester at present, a secondary cleaning device was designed based on the damage mechanism of peanut fruit after primary cleaning, which mainly included conveying chain, bar screen, screen frame, hydraulic cylinder and sliding plate, and the basic parameters of the device were determined. Through the analysis of ADAMS software, the collision model between peanut and the device in the cleaning process was established, and the screen speed, screen installation height and screen inclination angle were determined as the main influencing factors. The peanut variety “Yuhua 14” was tested and studied. The results show that the screen installation height is 29 cm, the screen rotation speed is 147 r/min, and the screen installation angle is 19°. The corresponding peanut fruit impurity content is 1.65%, and the cleaning loss rate is 1.37%. Through the analysis, the operation effect of the peanut combined machine with two-row and four-row with this device has been significantly improved.
Keywords:peanut; combined harvest; half feeding; secondary cleaning; ADAMS
0 引言
花生是我國重要的油料作物和經濟作物。近10年來我國花生種植面積與產量大幅增加,且種植面積與產量一直處于穩步增長的狀態[1]。目前通過文獻檢索和分析,國外針對半喂入花生收獲研究相對較少,由于國外花生植株主要以匍匐型為主,不適宜半喂入聯合收獲。國內研究發現,王冰等[2]針對半喂入花生收獲機的關鍵技術進行分析,同時針對四行收獲機彈指篩結構運行參數進行優化。王東偉等[3]針對生聯合收獲機L型輸送清選分離機構進行分析和研究,進一步降低花生含雜率。付云開[4]針對鮮花生進行物理特性分析,并對其篩選裝置進行大量試驗,并進行優化設計,降低其含雜率及莢果破損率。在花生聯合收獲機中,尤其是針對大喂入量的收獲機,清選環節格外重要,機械清選決定了花生收獲的含雜率和清選效率,對花生收獲機的整體工作性能和收獲質量影響較大[5]。現有的花生清選環節均以一次清選機構研究為主,均未涉及二次清選的方法,仍存在清潔率低、難以清選等問題,目前市場上的兩壟四行半喂入聯合收獲機經過一次清選后,含雜率均大于3%,關鍵技術難題亟待解決。
為提高半喂入花生聯合收獲機的性能,本文從現有的半喂入式花生聯合收獲機入手,設計一種二次清選機構。并通過ADAMS軟件對整個作業過程中的花生運動軌跡方程進行分析[6],對清選裝置的運動與工作參數進行調整,通過仿真試驗、田間試驗對機構進行優化分析,最終得出優化參數,為我國半喂入式花生聯合收獲清選技術體系建立奠定基礎[7]。
1 花生一次清選脫出物的清選特性研究
花生植株經過摘果滾筒,花生莢果與雜質混合物經過一次清選后,還存在未篩選掉的雜質及部分癟果,一起經過運輸鏈進入到集果箱中,在花生果進入集果箱前設計一種二次清選裝置[8],因此需要對一次清選后脫出混合物展開具體的物理特性研究,包括其混合物的組成成分、各種混合物所占的比例,其次再研究經過一次清選的振動風機吹后莢果物理性質的改變情況,同時對花生莢果及其混合物進行測定。最后,綜合分析花生經過一次清選且輸送后的各混合物,為后續的花生二次清選裝置結構形式、規律提供理論支持[9]。
1.1 花生一次清選后莢果物理特性研究
當花生收獲期時,因為獲取的營養物質不同,所以每個花生的長勢、籽粒飽滿程度不同,這樣將導致其花生的外形存在差異,因此需要對花生進行外部結構尺寸的測量[10],以山東省平度市“宇花14號”品種花生為例,構建如圖1所示的花生三軸尺寸示意圖進行探究,為后續的二次清選裝置的篩孔設計提供基礎。圖1中a表示花生寬度,b表示花生長度,c表示花生高度。
隨機選取“宇花14號”花生品種30顆,采用精度為0.02 mm的游標卡尺分別測量其長、寬、高,并記錄數據。通過Excel進行統計分析,結果如表1所示。
通過數據結果分析,發現“宇花14號”花生品種莢果長度數值分布在30~40 mm范圍內,其平均值為34.52mm;寬度數值分布在12~17 mm范圍內,其平均值為14.23 mm;高度分布在11~15mm范圍內,其平均值為13.55 mm。花生莢果在寬度和高度數值相近,即花生在寬度和高度層面的形狀尺寸近似一致,為后續花生建模及清選篩的篩孔設計提供了依據。
確定花生莢果尺寸同時,需要對花生莢果外殼進行破碎極限試驗。由于花生莢果在經過摘果環節[11],花生莢果會受到摘果輥一定的擠壓,當進入到一次清選篩時,會受到振動篩的不斷顛簸,同時由于風機的風選過程,會使莢果和雜質產生不同規則的碰撞,會使花生本身的物理性質發生改變[12],為了更好地確定二次清選裝置的結構和參數,需要對一次清選后的花生莢果進行莢果破碎驗,為后續的二次清選裝置的安裝高度、傾斜角度及轉速設計提供基礎。
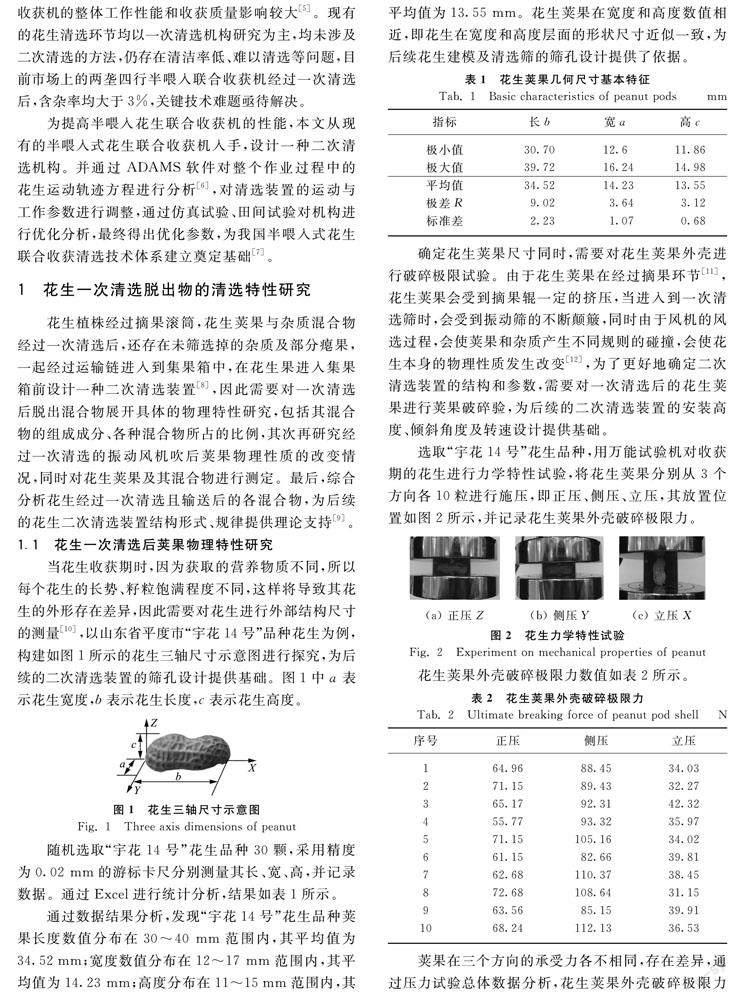
選取“宇花14號”花生品種,用萬能試驗機對收獲期的花生進行力學特性試驗,將花生莢果分別從3個方向各10粒進行施壓,即正壓、側壓、立壓,其放置位置如圖2所示,并記錄花生莢果外殼破碎極限力。
花生莢果外殼破碎極限力數值如表2所示。
莢果在三個方向的承受力各不相同,存在差異,通過壓力試驗總體數據分析,花生莢果外殼破碎極限力Y方向所承受的壓力最大,其次是Z方向,最弱的是X方向。花生莢果正壓即Z方向施壓載荷極限范圍55.77~72.68 N;花生莢果側壓即Y方向施壓載荷極限范圍88.45~112.13 N;花生莢果立壓即X方向施壓載荷極限范圍31.15~42.32 N。
1.2 花生一次清選脫出物的組成比例
探究花生一次清選脫出物的混合成分、各混合物所占的比例,對半喂入聯合收獲機一次清選機構清選效果進行檢驗,因為一次清選脫出物的組成成分和各成分比例變化時,清選工作效果也會發生很大變化,綜合分析花生一次清選脫出物各成分之間的特性差異,為二次清選裝置結構設計提供基礎[13]。
此次試驗的花生品種為“宇花14號”,在試驗田地隨機選取5段成熟花生,然后使用半喂入花生聯合收獲機進行收獲,花生在摘果、一次清選后,其脫出物主要包含花生莢果、殘根斷秧、輕雜質、土塊等,其中輕雜質主要包括草屑以及破碎果殼等[14]。其脫出物進行分類稱重得到試驗數據如表3所示
從表3可以看出,對于花生一次清選后的脫出物,除花生莢果外,殘根斷秧、輕雜質、泥土在花生一次清選脫出物中所占比例5%左右,為進一步降低花生收獲時的含雜率,需要設計一種二次篩選裝置。
2 二次清選裝置設計
2.1 二次清選裝置結構與原理
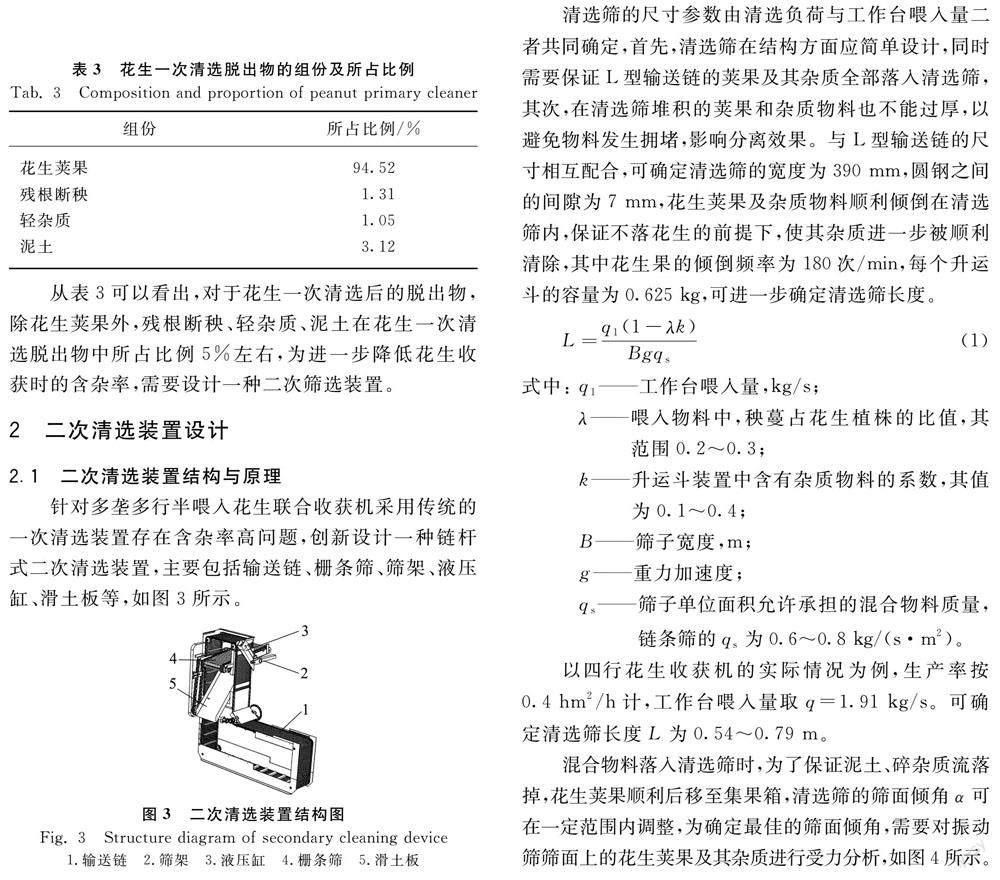
針對多壟多行半喂入花生聯合收獲機采用傳統的一次清選裝置存在含雜率高問題,創新設計一種鏈桿式二次清選裝置,主要包括輸送鏈、柵條篩、篩架、液壓缸、滑土板等,如圖3所示。
二次清選作業的過程主要包括對雜質的清選和對花生莢果的輸送,其運動過程主要為L型輸送鏈的轉動、清選篩自身轉動,當花生和雜質物料到達L型輸送鏈的頂部,將以平拋運動的形式散落在清選篩,同時由于清選篩具有一定的傾斜角度,將使得花生及其雜質呈現出顛簸趨勢,從而使泥土雜質振落,花生莢果跟隨清選篩自身運動流入集果箱。
其工作原理是,花生莢果及雜質通過L型輸送機構落到鏈桿式二次清選裝置上,該裝置可根據實際清選需求通過液壓缸來調節篩面與篩架之間的角度,更好地實現清選效果,通過角度的控制,控制花生莢果及雜質掉落在篩面的顛簸力,使得更多的雜質沿滑土板滑出,剩余的花生莢果則隨輸送鏈條進入集果箱。鏈桿式二次清選裝置與一級清選裝置配合使用,將一級未清理掉的雜質清選出去,完成清選作業。
2.2 清選篩運動理論分析
清選篩的尺寸參數由清選負荷與工作臺喂入量二者共同確定,首先,清選篩在結構方面應簡單設計,同時需要保證L型輸送鏈的莢果及其雜質全部落入清選篩,其次,在清選篩堆積的莢果和雜質物料也不能過厚,以避免物料發生擁堵,影響分離效果。與L型輸送鏈的尺寸相互配合,可確定清選篩的寬度為390 mm,圓鋼之間的間隙為7 mm,花生莢果及雜質物料順利傾倒在清選篩內,保證不落花生的前提下,使其雜質進一步被順利清除,其中花生果的傾倒頻率為180次/min,每個升運斗的容量為0.625 kg,可進一步確定清選篩長度。
L=q1(1-λk)Bgqs(1)
式中:q1——工作臺喂入量,kg/s;λ——喂入物料中,秧蔓占花生植株的比值,其范圍0.2~0.3;k——升運斗裝置中含有雜質物料的系數,其值為0.1~0.4;B——篩子寬度,m;g——重力加速度;qs——篩子單位面積允許承擔的混合物料質量,鏈條篩的qs為0.6~0.8 kg/(s·m2)。
以四行花生收獲機的實際情況為例,生產率按0.4 hm2/h計,工作臺喂入量取q=1.91 kg/s。可確定清選篩長度L為0.54~0.79 m。
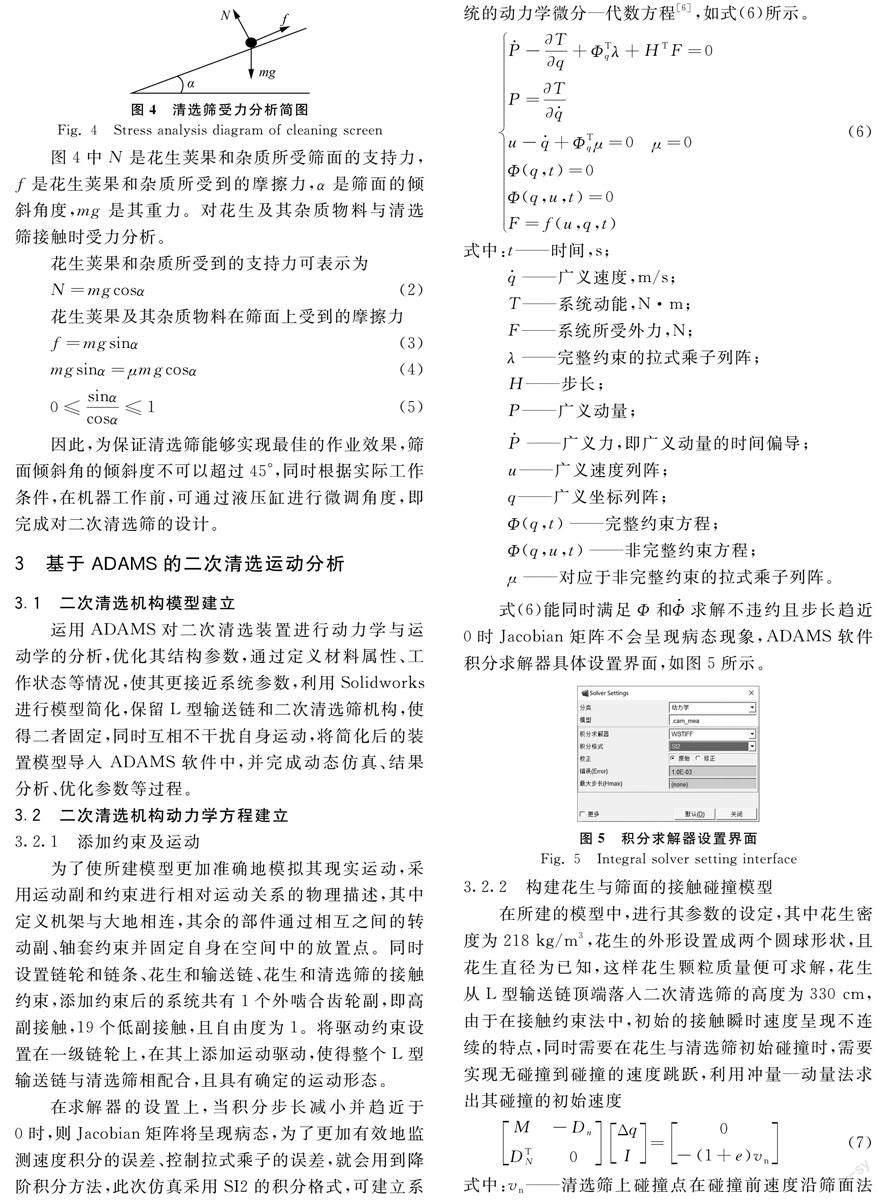
混合物料落入清選篩時,為了保證泥土、碎雜質流落掉,花生莢果順利后移至集果箱,清選篩的篩面傾角α可在一定范圍內調整,為確定最佳的篩面傾角,需要對振動篩篩面上的花生莢果及其雜質進行受力分析,如圖4所示。
圖4中N是花生莢果和雜質所受篩面的支持力,f是花生莢果和雜質所受到的摩擦力,α是篩面的傾斜角度,mg是其重力。對花生及其雜質物料與清選篩接觸時受力分析。
花生莢果和雜質所受到的支持力可表示為N=mgcosα(2)
花生莢果及其雜質物料在篩面上受到的摩擦力f=mgsinα(3)
mgsinα=μmgcosα(4)
0≤sinαcosα≤1(5)
因此,為保證清選篩能夠實現最佳的作業效果,篩面傾斜角的傾斜度不可以超過45°,同時根據實際工作條件,在機器工作前,可通過液壓缸進行微調角度,即完成對二次清選篩的設計。
3 基于ADAMS的二次清選運動分析
3.1 二次清選機構模型建立
運用ADAMS對二次清選裝置進行動力學與運動學的分析,優化其結構參數,通過定義材料屬性、工作狀態等情況,使其更接近系統參數,利用Solidworks進行模型簡化,保留L型輸送鏈和二次清選篩機構,使得二者固定,同時互相不干擾自身運動,將簡化后的裝置模型導入ADAMS軟件中,并完成動態仿真、結果分析、優化參數等過程。
3.2 二次清選機構動力學方程建立
3.2.1 添加約束及運動
為了使所建模型更加準確地模擬其現實運動,采用運動副和約束進行相對運動關系的物理描述,其中定義機架與大地相連,其余的部件通過相互之間的轉動副、軸套約束并固定自身在空間中的放置點。同時設置鏈輪和鏈條、花生和輸送鏈、花生和清選篩的接觸約束,添加約束后的系統共有1個外嚙合齒輪副,即高副接觸,19個低副接觸,且自由度為1。將驅動約束設置在一級鏈輪上,在其上添加運動驅動,使得整個L型輸送鏈與清選篩相配合,且具有確定的運動形態。
在求解器的設置上,當積分步長減小并趨近于0時,則Jacobian矩陣將呈現病態,為了更加有效地監測速度積分的誤差、控制拉式乘子的誤差,就會用到降階積分方法,此次仿真采用SI2的積分格式,可建立系統的動力學微分—代數方程[6],如式(6)所示。
P·-аTаq+ΦTqλ+HTF=0P=аTаq·u-q·+ΦTqμ=0 μ=0Φ(q,t)=0Φ(q,u,t)=0F=f(u,q,t)(6)
式中:t——時間,s;q·——廣義速度,m/s;T——系統動能,N·m;F——系統所受外力,N;λ——完整約束的拉式乘子列陣;H——步長;P——廣義動量;P·——廣義力,即廣義動量的時間偏導;u——廣義速度列陣;q——廣義坐標列陣;Φ(q,t)——完整約束方程;Φ(q,u,t)——非完整約束方程;μ——對應于非完整約束的拉式乘子列陣。
式(6)能同時滿足Φ和Φ·求解不違約且步長趨近0時Jacobian矩陣不會呈現病態現象,ADAMS軟件積分求解器具體設置界面,如圖5所示。
3.2.2 構建花生與篩面的接觸碰撞模型
在所建的模型中,進行其參數的設定,其中花生密度為218 kg/m3,花生的外形設置成兩個圓球形狀,且花生直徑為已知,這樣花生顆粒質量便可求解,花生從L型輸送鏈頂端落入二次清選篩的高度為330 cm,由于在接觸約束法中,初始的接觸瞬時速度呈現不連續的特點,同時需要在花生與清選篩初始碰撞時,需要實現無碰撞到碰撞的速度跳躍,利用沖量—動量法求出其碰撞的初始速度
M-DnDTN0ΔqI=0-(1+e)vn(7)
式中:vn——清選篩上碰撞點在碰撞前速度沿篩面法向投影;M——廣義質量矩陣;Δq——廣義位移;DTN——N階列陣;I——碰撞沖量;Dn——n維組數;e——碰撞恢復系數,取值0~1。
Dn=[Dnα,DnB1,DnB2,…,DnBi]T(8)
Dnα=-аV^Iаα/I=nаWаαhF(9)
DnBi=-аV^IаBi/I=nаWаBihF(10)
式中:V^I——沖量勢;α——浮動坐標系的轉角;Bi——模態坐標點;hF——浮動坐標系下碰撞點P位置矢量列陣;W——慣性系到浮動坐標系的方向余弦陣。
得出碰撞后廣義速度、廣義位移為q·t+=q·t++Δq·(11)
qt+=qt-(12)
Δq=M-1DnI(13)
式中:Δq·——廣義速度增量列陣;Δq——廣義位移;M-1——廣義質量逆矩陣。
3.3 仿真運行與結果分析
花生莢果跟隨清選篩運動過程中,隨著篩面轉速的增大,花生莢果受到的力將增大,如圖6所示。
由莢果的物理特性試驗得到,圖6中莢果隨裝置運動而造成的碰撞力數值遠大于莢果抗壓力。綜合分析可得到造成莢果破損的沖擊力度不僅與莢果自身抗壓極限載荷相關,也與篩子轉速、篩子傾斜角度、篩子安裝高度等因素相關,后續進行裝置設計時調節篩子基本參數并進行試驗驗證影響。
4 花生篩選試驗分析
4.1 凈果篩選率的標準
二次篩選裝置決定了花生收獲過程的篩選損失率和莢果含雜率。通過各因素不同水平的正交試驗[15],得到最優參數組合,將莢果損失率和莢果含雜率作為試驗指標,通過試驗數據對二次篩選裝置進行評價。
篩選裝置是構成花生收獲機的重要部分,通過二次篩選裝置進一步篩分雜質物料。根據收獲機的相關試驗方法,將莢果含雜率Y1和莢果的損失率Y2作為評價二次篩選裝置工作性能的試驗指標,其中損失率Y2作為次要試驗指標,莢果含雜率Y1作為主要試驗指標。
花生莢果含雜率
Y1=w′w×100%(14)
式中:w——二次清選后物料總質量,kg;w′——二次清選后雜質質量,kg。
花生莢果損失率
Y2=m′m×100%(15)
式中:m——莢果總質量,kg;m′——清選后花生莢果損失質量,kg。
4.2 篩選裝置安裝高度單因素試驗分析
二次清選篩安裝高度距離對花生篩選率有影響,此試驗主要是探究安裝高度對花生清選效果的影響規律,篩面傾角設置為20°,將轉速設置為140 r/min。清選篩安裝高度對花生莢果含雜率、損失率造成的影響如圖7所示,隨著安裝高度的增大,含雜率逐漸降低,而損失率逐漸趨于增大,當高度設置30 cm時,含雜率低于3%,莢果損失率低于2%,其清選篩的篩選效果最好。
4.3 篩選裝置轉速單因素試驗分析
花生莢果含雜率、損失率與篩子轉速密切相關,設置篩面傾角為25°,篩子安裝高度30 cm,本次試驗主要以110 r/min、120 r/min、130 r/min、140 r/min、150 r/min、160 r/min等不同轉速來測定花生收獲效果,并研究篩子轉速與莢果含雜率、莢果損失率之間的影響規律,試驗結果如圖8所示。當轉速低于130 r/min時,花生莢果易堆積,雜質容易跟隨莢果進入集果箱,含雜率高于7%,莢果損失情況相對增大,當轉速高于150 r/min時,轉速較高,花生莢果在二次清選篩停留時間較短,花生的含雜率又將呈現上升趨勢,而莢果的損失率曲線則趨于平穩,基于試驗結果表明,當轉速穩定在140 r/min時,其清選效果最佳。
4.4 篩子安裝角度單因素試驗分析
篩子的安裝角度對花生莢果及其雜質物料運動情況影響顯著,對莢果的含雜率和損失率都將造成影響,本文將篩子轉速設置為140 r/min,安裝高度35 cm,在該條件下,以不同安裝角度5°、10°、15°、20°、25°、30°、35°、40°來探究篩選效果如圖9所示。當篩子安裝角度為19°時,花生莢果含雜率、莢果損失率最低,分別為3.1%、1.8%。這是因為篩子的傾斜角度影響了花生莢果和雜質物料的運動。
5 多因素試驗分析
5.1 試驗條件
在山東省平度市試驗基地開展試驗,該試驗基地種植花生品種為“宇花14號”,其花生種植農藝模式為單壟雙行種植,壟距750 mm,株距263 mm,產量4 000 kg/hm2。試驗設備是以二壟四行花生聯合收獲機進行田間試驗,并通過取樣、稱重等方式進行試驗數據的計算和獲取。
選取對收獲質量影響較大的篩子安裝高度、篩子轉速、篩子安裝角度作為試驗因素。以莢果含雜率、莢果損失率作為試驗指標,試驗因素與水平如表4所示。
5.2 試驗結果
根據Box-Behnken試驗原理設計分析試驗[16, 17],以花生含雜率、花生損失率為指標,試驗總共進行17組,試驗方案與結果如表5所示。其中,A、B、C為因素編碼值。
5.3 回歸模型的建立與檢驗
利用Design-Expert軟件對表5數據開展多元回歸擬合分析[18],建立莢果含雜率Y1、清選損失率Y2對A、B、C的響應面回歸模型,并對回歸方程進行方差分析,如表6所示。
Y1、Y2對A、B、C的響應面回歸模型為
Y1=1.92+0.09A+0.51B-0.17C+0.063AB-0.57AC+0.15BC-0.26A2-0.18B2-0.13C2(16)
Y2=1.22-0.14A+0.044B+0.031C+0.018AB+0.033AC-0.015BC+0.78A2+0.39B2+0.48C2(17)
由表6可知,莢果含雜率Y1、清選損失率Y2的P值均小于0.05,表明2個模型影響極顯著。失擬項P值均大于0.05,失擬不顯著,因此,該模型可以預測二次清選裝置的工作參數。根據兩模型各因素回歸系數,可得到各因素對莢果含雜率的影響由大到小為A、C、B,即篩子轉速、篩子安裝角度、篩子安裝高度,各因素對清選損失率的影響由大到小為A、B、C,即篩子安裝高度、篩子轉速、篩子安裝角度。
5.4 模型交互項解析
如圖11所示,兩兩因素交互作用莢果含雜率響應曲面變化趨勢分析,表明莢果含雜率隨篩子安裝高度A的增大而減小,隨安裝角度C的增大而減小,受篩子轉速B的影響偏小。
如圖12所示,兩兩因素交互作用對指標損失率的響應曲面變化趨勢分析,表明篩選損失率隨篩子安裝高度A的增大而增大,隨安裝角度C的增大而增大,隨篩子轉速B的增大而增大。
5.5 二次清選裝置參數優化
依據上述試驗結果分析,為進一步提升二次清選作業性能,在各試驗因素水平約束條件下,將莢果含雜率Y1、清選損失率Y2最小值作為優化指標,建立性能指標全因子二次回歸方程,進行目標優化與最優工作參數確定
minY1(A,B,C)minY2(A,B,C)s.t.25 cm≤A≤35 cm130 r/min≤B≤150 r/min15°≤C≤25°(18)
利用Design-Expert可求得滿足約束條件的最小莢果含雜率Y1、清選損失率Y2的最優參數組合。求解的最優參數組合為:篩子安裝高度29 cm、篩子轉速為147 r/min、篩子安裝角度19°,此時莢果含雜率為1.65%、清選損失率為1.37%。
通過田間試驗驗證,含雜率穩定在2.6%,清選損失率穩定在1.9%,均低于我國農業行業標準NY/T 502—2016《花生收獲機作業質量》的要求,同時驗證了二次篩選裝置的工作效果。
6 結論
1) ?設計了一種二次清選裝置,主要包括輸送鏈、柵條篩、篩架、液壓缸、滑土板。其與L型輸送鏈的尺寸相互配合,二次清選篩寬度為390 mm,柵條之間間隙為7 mm,長度范圍0.54~0.79 m。
2) ?在分析二次清選裝置工作原理的基礎上,進行了二次清選關鍵部件的結構參數優化及理論分析,利用ADAMS仿真軟件建立二次清選裝置虛擬樣機模型,得出影響清選篩的平均撞擊載荷遠小于花生極限抗壓載荷,并確定了各因素的參數范圍。
3) ?利用Design-Expert軟件,進行二次清選裝置工作參數優化,試驗結果表明:莢果含雜率的影響主次順序分別為篩子轉速、篩子安裝角度、篩子安裝高度,清選損失率的影響主次順序為篩子安裝高度、篩子轉速、篩子安裝角度。求解的最優參數組合為篩子安裝高度29 cm、篩子轉速147 r/min、篩子安裝角度19°,此時,莢果含雜率為1.65%、清選損失率為1.37%。
參 考 文 獻
[1]孫千濤, 錢凱, 劉道奇, 等. 鋸片式花生去柄清選試驗臺的設計與試驗[J]. 山西農業大學學報(自然科學版), 2021, 41(3): 121-128.Sun Qiantao, Qian Kai, Liu Daoqi, et al. The design and verification of the saw blade of test bench for peanut cleaning and handle removing [J]. Journal of Shanxi Agricultural University (Natural Science Edition), 2021, 41(3): 121-128.
[2]王冰, 胡志超, 彭寶良, 等. 半喂入四行花生聯合收獲機彈指篩結構運行參數優化[J]. 農業工程學報, 2017, 33(21): 20-28.Wang Bing, Hu Zhichao, Peng Baoliang, et al. Structure operation parameter optimization for elastic steel pole oscillating screen of semi-feeding four rows peanut combine harvester [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017,?33(21): 20-28.
[3]王東偉, 尚書旗, 李想, 等. 花生聯合收獲機L型輸送清選分離機構研究[J]. 農業機械學報, 2013, 44(S2): 68-74, 51.Wang Dongwei, Shang Shuqi, Li Xiang, et al. Type-L cleaning separation mechanism of peanut combine harvester [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(S2): 68-74, 51.
[4]付云開. 鮮花生莢果篩選裝置試驗研究[D]. 沈陽: 沈陽農業大學, 2019.Fu Yunkai. Study on screening device for wet peanut pods [D]. Shenyang: Shenyang Agricultural University, 2019.
[5]王東偉, 尚書旗, 韓坤. 4HJL-2型花生撿拾摘果聯合收獲機的設計與試驗[J]. 農業工程學報, 2013, 29(11): 27-36, 294.Wang Dongwei, Shang Shuqi, Han Kun. Design and test of 4HJL-2 harvester for peanut picking-up and fruit-picking [J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(11): 27-36, 294.
[6]于殿勇, 錢玉進. 基于ADAMS動力學仿真參數設置的研究[J]. 計算機仿真, 2006(9): 103-107, 183.Yu Dianyong, Qian Yujin. Parameter-settings for the dynamic simulation based on ADAMS [J]. Computer Simulation, 2006(9): 103-107, 183.
[7]李豪杰, 王青華, 李軍浩. 半喂入花生聯合收獲機去石清選裝置設計與試驗[J]. 中國農機化學報, 2021, 42(10): 29-33, 58.Li Haojie, Wang Qinghua, Li Junhao. Design and experiment of stone cleaning device for half feeding peanut combine harvesters [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(10): 29-33, 58.
[8]田立權, 張正中, 呂美巧. 半喂入聯合收割機雙速回轉脫分裝置設計與性能試驗[J]. 中國農機化學報, 2020, 41(9): 8-15.Tian Liquan, Zhang Zhengzhong, Lü Meiqiao. Design and performance experiments of new threshing and separating device for head-feeding combine harvester [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(9): 8-15.
[9]楊猛, 胡志超, 張延化, 等. 農業顆粒物料氣力清選裝置研究現狀與展望[J]. 中國農機化學報, 2020, 41(3): 121-127.Yang Meng, Hu Zhichao, Zhang Yanhua, et al. Research status and prospect of pneumatic cleaning device for agricultural granular materials [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(3): 121-127.
[10]王青華, 閆昂昂. 花生聯合收獲機風動拋撒清選裝置的研究[J]. 農業裝備與車輛工程, 2019, 57(4): 20-22.
[11]陳有慶, 胡志超, 王申瑩, 等. 割秧后花生收獲機撿拾裝置設計與試驗[J]. 農業工程學報, 2020, 36(16): 1-8.Chen Youqing, Hu Zhichao,Wang Shenying, et al. Design and experiments of pickup device for peanut harvester after cutting peanut straws [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(16): 1-8.
[12]楊猛. 風篩組合式花生膜秧分離技術研究與機構優化[D]. 北京: 中國農業科學院, 2021.Yang Meng. Study on separation technology and mechanism optimization of fan-sieve combined peanut residual film-seedling separating machine [D]. Beijing: Chinese Academy of Agricultural Sciences, 2021.
[13]陳云, 楊國華. 半喂入式聯合收割機脫粒不凈的原因及處理方法[J]. 江蘇農機化, 2021(2): 48-51.
[14]徐繼康, 楊然兵, 李瑞川, 等. 半喂入花生收獲機除膜摘果裝置設計與試驗[J]. 農業機械學報, 2014, 45(S1): 88-93.Xu Jikang, Yang Ranbing, Li Ruichuan, et al. Design and experiment of film removing and peanut picking device for half-feeding harvester [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(S1): 88-93.
[15]李云雁. 試驗設計與數據處理[M]. 北京: 化學工業出版社, 2005.
[16]李志輝, 羅平. SPSS for Windows統計分析教程[M]. 北京: 電子工業出版社, 2005.
[17]莊楚強, 吳亞森. 應用數理統計基礎[M]. 廣州: 華南理工大學出版社, 1992.
[18]鄭少華, 姜奉華. 試驗設計與數據處理[M]. 北京: 中國建材工業出版社, 2004.
基金項目:山東省重點研發計劃(重大科技創新工程)項目(2021CXGC010813)
第一作者:李冬杰,女,1996年生,山東德州人,碩士研究生;研究方向為根莖類作物生產機械化技術與裝備。E-mail: 1124349753@qq.com
通訊作者:王東偉,男,1981年生,山東泰安人,博士,教授;研究方向為現代高效農業—智慧農機。E-mail: 200701031@qau.edu.cn
