一種新型1000 MW超臨界鍋爐水冷壁爬壁機器人結構設計
2024-04-28 06:37:00奚林根王志剛曹一峰黃賢明
無線互聯科技 2024年5期
奚林根,王志剛,曹一峰,黃賢明
(1.江蘇常熟發電有限公司,江蘇 蘇州 215500;2.常熟理工學院,江蘇 蘇州 215500)
0 引言
水冷壁是火力發電廠鍋爐的重要組成部分,根據鍋爐大小,由不同管徑的鋼管一排排連接而成[1]。水冷壁管內流動的水可以在火力發電過程中吸收煤燃燒過程中產生的熱量,進而起到對鍋爐爐墻的保護作用[2]。由于煤在燃燒過程中,產生的大量熱能、煙氣火焰等惡劣因素,會讓水冷壁受熱面極易出現損傷,造成失效老化現象,嚴重時引發安全事故[3]。
目前,在役鍋爐的水冷壁受熱面磨損檢測作為確保設備能夠平穩運行的一項工作內容,其重要程度不言而喻,但仍以常規技術手段檢測為主,例如目視檢驗、卡尺測量、超聲波測厚儀檢測、電筒照射檢查等人工方式。這種檢查方式選擇的檢測對象是隨機抽檢出來的,不能做到部件設備的全方位檢測,往往出現突發爆管缺陷,嚴重影響機組的安全穩定運行[4]。綜上所述,傳統的人工作業方式存在安全隱患高、效率低等問題。隨著科技的不斷發展,機器人技術也開始在電力行業發揮作用[5-6],本文設計了一款新型的鍋爐水冷壁爬壁機器人,以期解決目前水冷壁檢測難題。
1 水冷壁爬壁機器人
爬壁機器人是傳統機械結構學與現代智能控制理論相結合的產物,作為典型的特種移動機器人,它具備吸附和爬壁2個基本功能,通過移動機構和吸附結構的優化組合,將地面移動技術拓展到垂直空間[7]。它是通過吸附裝置吸附在壁面上,移動機構在有吸附力的情況下保持在壁面上移動,進而帶動執行機構完成工作任務。保證機器人在復雜表面移動的必要因素就是爬壁機器人的吸附性能。磁吸附裝置作為移動結構的重要組成部分,為機器人行走提供吸附保障,吸附力不足會導致跌落或傾覆,但如果一味追求更強吸力將會導致磁吸附裝置體積與質量的增加,進而影響爬壁機器人的運動靈活性,增大了驅動機構的負載。
在電力行業,尤其是在電廠鍋爐的維護和檢修過程中,傳統的人工作業方式存在安全隱患高、效率低等問題[8]。為了解決這些問題,本文采用深度融合、高度集成的設計思路,以水冷壁爬壁機器人為載體,結合計算機視覺、電磁超聲無損檢測、自動化等技術,設計鍋爐水冷壁爬壁機器人,致力于解決困擾火電行業已久的缺少有效評估檢查鍋爐水冷壁外觀磨損及內部腐蝕狀態的評估問題。
1.1 總體結構設計
本文設計的爬壁機器人主體結構如圖1所示,主要由控制系統、驅動機構、腿部結構和吸附機制等組成。控制系統是由多個控制模塊構成,包括運動控制模塊、傳感器控制模塊和通信控制模塊等。其中,運動控制模塊負責操控機器人的運動,傳感器控制模塊負責控制各個傳感器的工作,而通信控制模塊則用于與外部設備進行通信。

圖1 爬壁機器人整體結構
主要檢測流程:爬壁機器人接收指令后沿壁面向上爬行,到達指定區域后觸發上限位開關停止,等待進一步的指令。接收到向下爬行的指令啟動,編碼器實時反饋位置信息,每爬行一段設定的距離后停止,等待相關檢測指令,收到上位機下達檢測指令后,執行操作完成檢測工作。直到爬壁機器人運行到底部觸發下限位開關停止,結束檢測。
腿部結構是爬壁機器人的重要組成部分,由多個關節和支撐部件組成,為機器人提供穩定支撐并實現多自由度移動。為了應對水冷壁的特有結構,本文設計的腿部結構為履帶式,在履帶的一周上安裝有數個永磁吸附塊,其中的一部分緊緊地吸附于壁面上,履帶由鏈條與永磁吸附塊組成,由一臺交流伺服電動機通過諧波減速器驅動。固定在鏈條上的永磁吸附塊隨著鏈條的旋轉而依次脫離壁面和吸附于壁面,從而實現機器人在壁面上的移動。雖然履帶式爬壁機器人運動靈活性差,轉向阻力大,可能對壁面造成磨損,但其吸附力大,滿足爬壁機器人在有一定負載的情況下,擁有在冷壁上進行轉向、越障的能力。在吸附機制方面,因為磁力的作用力垂直于表面,所以即使在傾斜或者不平整的表面上,機器人也能保持穩定地吸附在壁面,且減輕了爬壁機器人本體的供電需求。
1.2 驅動模塊
驅動模塊設計是爬壁機器人的關鍵組成部分,它的穩定性、效率和可靠性直接影響機器人的工作性能,本文所設計的爬壁機器人驅動模式如圖2所示。
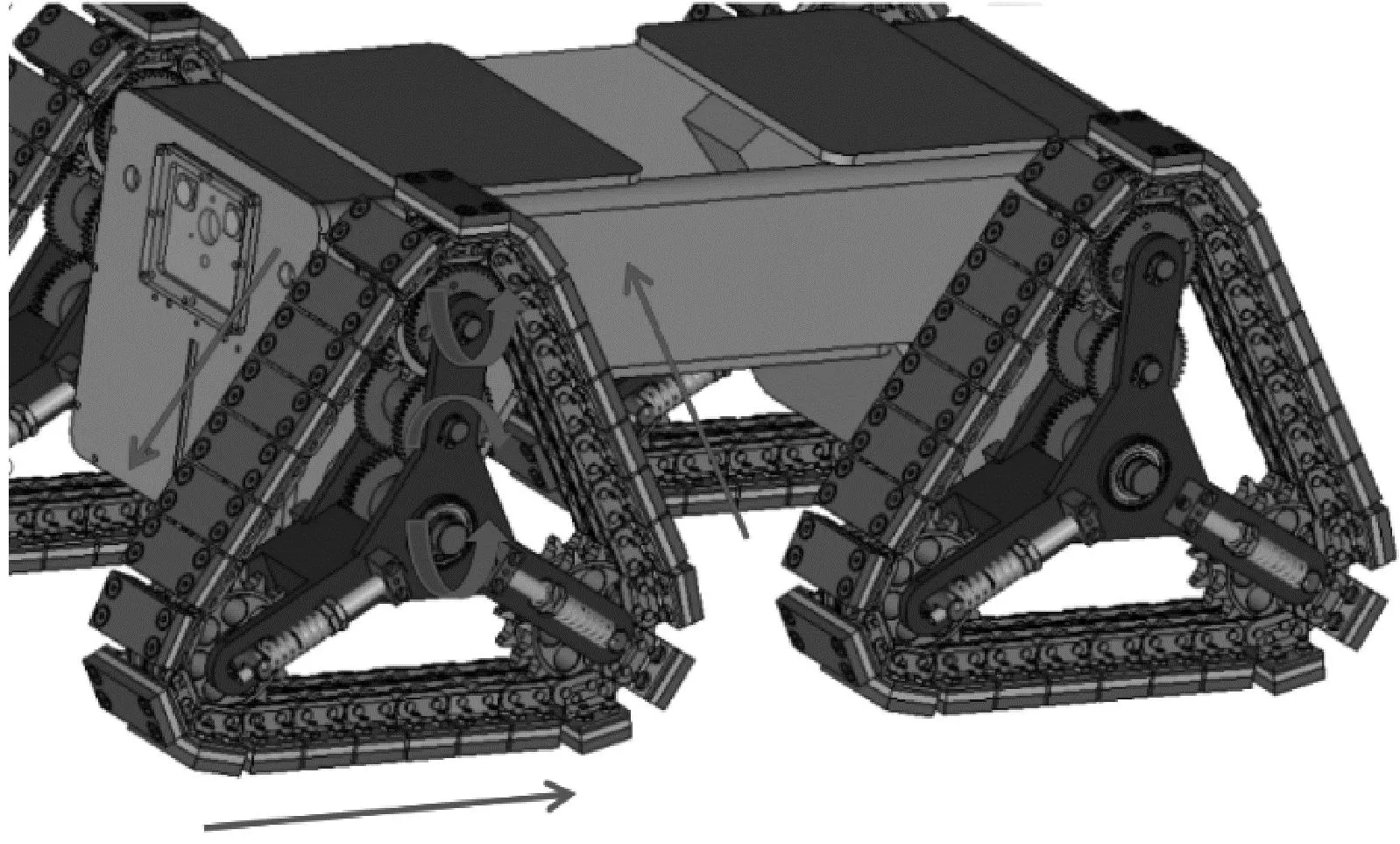
圖2 爬壁機器人驅動模式
該模塊用于控制和驅動爬壁機器人在各種表面進行移動和操作,如圖3所示,本文采用4個電機驅動,每個鏈輪可實現單獨或聯動控制,每個電機功率為48 W。通過內部的齒輪傳動,帶動外部鏈條轉動,為小車提供小于7.8 m/min的行進速度。通過各個輪電機的差動控制,實現小車轉彎爬行。

圖3 爬壁機器人驅動結構
2 爬壁機器人功能設計
2.1 環境感知功能
爬壁機器人的前后攝像頭是其對周圍環境感知功能的重要組成部分,爬壁機器人環境感知功能如圖4所示,攝像頭具有360°全景拍攝能力,分辨率達到不低于1920×1080的標準。這樣的配置不僅可以實時獲取機器人周圍的環境信息,還能對高空水冷壁的檢測位置和路徑進行實時監視和調整,確保掃查軌跡的可控性。同時,較高的遙控操作靈敏度、延遲時間不超過1 s,使得機器人能快速響應操作指令。

圖4 爬壁機器人環境感知功能
2.2 清掃功能
清洗是水冷壁爬壁機器人的性能分析和控制的一個重要環節,清掃結構如圖5所示,爬壁機器人的清掃機構主要由履帶吸盤式行走機構、清洗刷和配氣機構等組成。履帶吸盤式行走機構是其基礎結構,通常安裝在機器人機身兩側,構成對稱分布,通過直流電機驅動,能夠實現在壁面上穩定行走。清洗刷是實現清潔功能的重要部分,可通過攜帶清洗刷對爐體或其他壁面進行清洗。
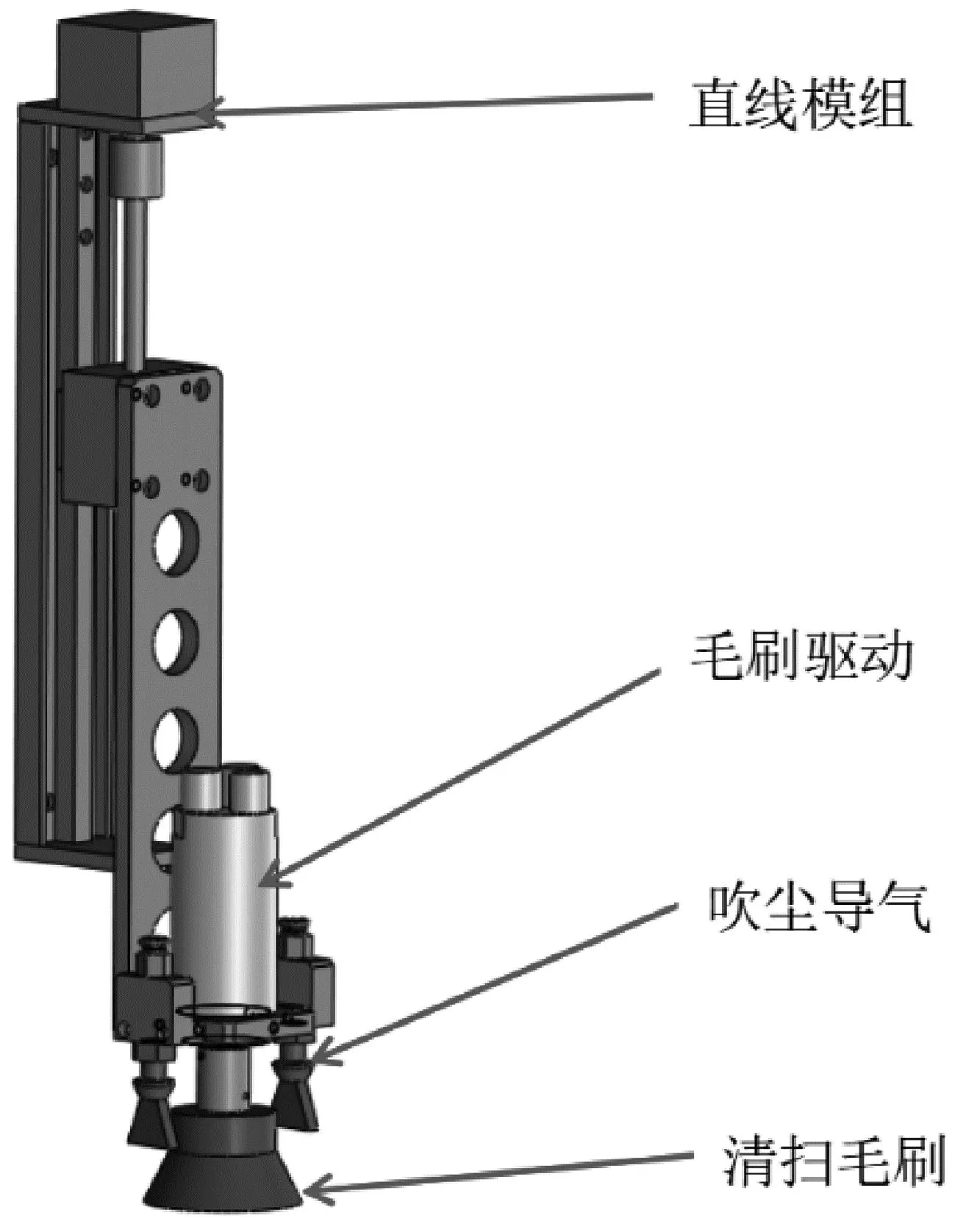
圖5 清掃結構
配氣機構作為清掃機構的一部分,其主要作用是控制吸盤的真空度以實現穩定的吸附。如王浩等[9]提到的一種配有新型自動配氣機構的履帶吸盤式爬壁清潔機器人,這種新型配氣機構可以自動實現吸盤的配氣。
2.3 缺陷識別功能
該模塊采用線掃相機進行圖像采集,具體結構如圖6所示。線掃相機與小車行進速度匹配,自動調整采樣率,可在爬壁機器人行進過程中采集圖像并將圖像發送會后臺控制端,后端服務器可根據圖片初步識別水冷壁管缺陷。在相機鏡頭周圍設計了照明燈,為線掃相機提供照明,照明燈環供電電壓為12 V,每個燈為3 W,共8個燈珠。
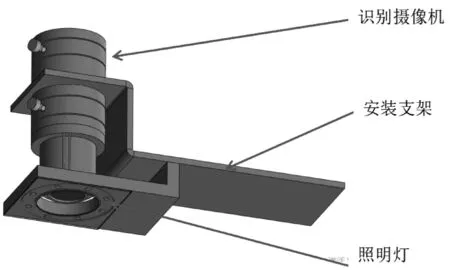
圖6 相機安裝結構
2.4 測厚功能
水冷壁爬壁機器人能夠在行進時對水冷壁測厚[9],本次設計采用電磁超聲無損檢測技術對水冷壁進行測厚,測厚功能結構如圖7所示。作為一種新發展起來的超聲無損檢測技術,電磁超聲可以在檢測探頭與被檢測材料表面不接觸的情況下,實現聲波的發射和接收。電磁超聲在檢測過程中,探頭和被檢測材料之間不需要借助耦合劑作為聲波傳輸介質。同時,通過改變探頭內部檢測線圈和磁場的配置方式,可以在被檢測材料內部激發出多種類型的超聲波信號。該技術具有不接觸、檢測速度快、無需耦合劑等優點,已經成為無損檢測技術中的重要技術。
3 結語
本文設計的水冷壁爬壁機器人可以有效替代電廠內人工防磨巡檢,不但可以檢測水冷壁外觀缺陷,還可以測量水冷壁爐管厚度,進而評估水冷壁爐管腐蝕情況。將該型爬壁機器人應用于水冷壁防磨檢査工作中,可以提高巡檢效率、降低巡檢成本、改善工作條件,還可以發現微小缺陷,將爆管事故扼殺在萌芽狀態。下階段,筆者將對該爬壁機器人系統功能進一步優化,實現更科學精確的水冷壁防磨檢測及爐管腐蝕情況評估。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
海峽科技與產業(2016年3期)2016-05-17 04:32:12
