單繩纏繞式礦井提升機制動瞬態沖擊抑制策略
2024-05-03 10:29:06解輝沈剛劉東湯裕朱真才
華南理工大學學報(自然科學版) 2024年3期
解輝 沈剛 劉東 湯裕 朱真才
(1.中國礦業大學 機電工程學院,江蘇 徐州 221000;2.安徽理工大學 機電工程學院,安徽 淮南 232000;3.中國船舶集團有限公司 第七一三研究所,河南 鄭州 450015)
礦井提升機作為煤炭生產中的關鍵設備,承擔著礦物提升、材料和設備的運輸任務,而制動系統作為提升機最后一道也是最為關鍵的安全保障設備,其運行安全性對全礦的生產乃至人員的生命安全都有重要影響[1]。礦井提升機制動系統可以歸納為閥控液壓缸系統,其工作過程為松閘-貼閘-壓緊。目前,一些常見的控制方法,例如PID[2]、模糊控制[3]和自適應控制[4]已經應用于礦井提升機制動系統。然而,上述控制方案將制動器工作過程的控制模式設定為制動力閉環,制動系統的彈性剛度系數在閘瓦接觸到閘盤前后存在從零到一個很大值的跳變,從而引起系統的結構跳變,進而導致制動力沖擊現象,造成制動安全性下降。
目前,針對礦井提升機制動瞬態沖擊的研究尚缺乏,但從現有的研究發現,制動控制系統的反饋增益是影響制動瞬態沖擊的關鍵因素,通過選擇較小的反饋增益可以在一定程度上抑制制動力沖擊問題。但在煤礦安全規程中對制動器貼閘時間有嚴格要求,較小的反饋增益會造成貼閘時間延長,導致貼閘時間不滿足安全規程要求,影響制動安全。為解決這一問題,將制動過程進行分段控制,貼閘段采用位置閉環控制,貼閘完成后穩態切換至制動力閉環控制。采用這種分段控制策略,不僅可以解決傳統全程力閉環控制策略導致的瞬態沖擊問題,而且可以通過設計合理的貼閘軌跡來實現縮短貼閘時間的目的,進而提高制動安全性。當前,對于模式切換控制方法,相關學者已經開展了一些研究,提出了魯棒控制[5]、阻抗控制[6-7]、動態混合力位控制[8-9]等。魯棒控制在解決控制系統參數不確定性和外部擾動問題方面具有優勢,在一定程度上能夠提高被控系統的穩定性和魯棒性。文獻[10]中針對不確定切換系統,提出了一種能夠在任意時變切換規則下的魯棒積分滑膜控制方法,實現了存在不匹配不確定性的切換系統的穩態控制。但本文所研究的制動系統在制動器閘瓦與閘盤貼合前后會存在外負載剛度參數跳變的問題,對于這種情況,采用常規的魯棒控制方法難以獲得令人滿意的控制性能。阻抗控制作為一種典型多模式切換控制策略,主要用于終端工作與其環境之間的安全交互。文獻[11]中針對機器人與環境的安全交換控制,提出了一種基于近似動態逆變的保穩變阻抗控制辦法,保證了所需可變阻抗動力學的指數穩定性。然而,由于制動系統對貼閘時間的性能要求以及閘瓦的大剛度的固有特性,導致阻抗控制方法難以應用于制動系統。混合力/位置控制的設計問題涉及如何保證不同控制器在每個切換瞬間的穩定性,以及隨動態特性的變化保證跟蹤性能的準確性。因此,混合力/位置控制更適合應用于制動系統的切換控制。
在制動系統中進行混合力位控制時不可避免地面臨著非線性摩擦、外部擾動和建模不確定性。以上這些不確定因素可能會使混合控制系統出現極限循環、抖振和低控制精度等問題。針對以上問題,文獻[12]中設計了一種變結構控制器,在一定程度上解決了參數不確定性和系統隨機擾動等問題。文獻[13]中綜合考慮了系統中參數和外界擾動的不確定性,提出了一類帶有非線性擾動不確定切換系統的魯棒控制。但對于參數發生較大跳變的制動系統,采用常規的適用于參數慢時變的控制方法,系統很難獲得較高的跟蹤性能。快速終端滑模控制方法具有使系統在有限時間內收斂為零的特點,被廣泛應用于需要快速響應的被控對象[14-15]。
此外,安全制動是保障提升機在遇到緊急情況下的重要環節,為了提高制動的安全性,需要盡量減小制動器的貼閘時間。然而,實際的機電液系統都受著各種運動學和動力學約束,例如速度約束和控制輸入飽和,這導致貼閘時間不可能無限地減小。因此,在系統壓力和流量的約束條件下盡可能減小貼閘時間是本文所要解決的重要問題,該問題通常被稱為最小時間軌跡規劃。目前,關于最小時間軌跡規劃問題的幾個典型方法包括基于速度極限曲線的數值積分法、多面體方法、雙向檢查法以及非線性濾波器法[16]。文獻[17]中將約束軌跡規劃與非線性運動控制相結合,實現了電液執行器在約束條件下的精確軌跡跟蹤。
受以上文獻啟發,本文提出了一種混合貼閘/壓緊控制策略,用于單繩纏繞式礦井提升機制動系統的安全制動控制。首先,將制動控制過程劃分為貼閘和壓緊控制。然后,基于滯回切換原理,提出了制動系統貼閘/壓緊混合控制策略,實現了貼閘與壓緊控制的穩態切換,抑制了制動瞬態沖擊。最后,設計了一種基于終端滑模的內外雙閉環最小時間貼閘控制策略,不但可以使制動系統在滿足流量和壓力約束條件下實現最短時間貼閘,而且保證了制動器貼閘軌跡精準跟蹤。
1 制動系統建模與問題提出
1.1 制動系統建模
如圖1所示為礦井提升機的電液制動系統原理圖,該系統主要由制動器、伺服閥、閘瓦、閘盤、位移及壓力傳感器等組成。當系統接收到制動命令時,制動器由伺服閥控制推動閘瓦形成作用于閘盤上的制動正壓力,進而使得卷筒減速,最終達到提升系統減速的目的。

圖1 閥控電液制動系統基本原理圖Fig.1 Schematic diagram of valve controlled electro-hydraulic braking system
本文將活塞、活塞桿以及閘瓦等活動部件等效為質量為m的質量塊進行受力分析。盤式制動器在接收到制動命令后經歷施閘、壓緊兩個階段,在施閘階段,盤式制動器主要克服非線性摩擦力,在壓緊階段,盤式制動器主要完成期望的制動正壓力。根據牛頓第二定律,盤式制動器負載力平衡方程為
式中,B為黏性摩擦系數;為基于Stribeck效應的摩擦模型,=a1tanh+a2tanh-a2tanh;a1和a2為不同摩擦力的幅值;b1、b2和b3為摩擦模型系數,用以近似描述各種摩擦效應;Fz(t)=sqkf(xp-x0);x0為閘盤的位置。如圖1所示,此時閘瓦受到位移約束,一般選擇x0=0;sq為二進制變量,可以描述為
式中,kf為制動器剛度系數。為簡化建模,本文未考慮環境接觸的恢復系數與結構阻尼等因素。
考慮制動器的內泄漏與油液壓縮性,制動器流量連續性方程可以寫為
式中:QL為負載流量;Ap為制動器有效作用面積;Ct為制動器內泄漏系數;pL為制動器負載壓降,pL=p1-p2;Vt=V1+V2為制動器油腔總容積,其中V1=V0+Apxp,V2=V0-Apxp,V0為制動器活塞處于中位時兩腔容積;βe為液壓油的有效體積彈性模量。
根據流體傳動理論,制動系統伺服閥流量方程可以表示為
式中:Cd、wv和xv分別為伺服閥的流量系數、節流口面積梯度和閥芯位移,其中閥芯位移可以表示為xv=kvu,kv為伺服閥的電氣增益,u為伺服閥控制電壓;ps為系統供油壓力;ρ為液壓油密度;pL為負載壓力;sign(·)為符號函數。
本文中研究的礦井提升機制動瞬態沖擊抑制控制方法均是基于制動系統模型進行設計的,因此需要將上文所建立的制動系統模型轉化為狀態方程的形式。根據制動系統負載力平衡方程和流量連續性方程,系統狀態方程可以表示如下:
為解決制動瞬態沖擊問題,本文將盤式制動器貼閘與壓緊兩個動作的控制設計為位置/力混合控制模式。因此,混合貼閘/壓緊動態制動系統狀態方程表示如下:
1.2 控制問題提出
本文的控制目標是實現礦井提升機的制動瞬態沖擊抑制,減小貼閘時間,提高制動的安全性。因此,本文的控制問題可以歸納如下:
(1)設計制動系統的貼閘/壓緊混合控制策略,實現由貼閘控制到壓緊控制的穩態切換,抑制制動瞬態沖擊;
(2)設計一種最速貼閘控制器,可以使得制動系統在滿足流量和壓力約束條件下以最短時間完成貼閘動作,減小制動器空動時間。
2 混合貼閘/壓緊控制策略
如圖2所示為礦井提升機制動瞬態沖擊抑制控制方案。閘瓦位置控制器主要實現制動器的快速貼閘;壓緊控制器主要用于閘瓦與閘盤貼合后的制動力跟蹤;自主切換策略主要實現盤式制動器由位置控制到力控制的自主穩態切換,以減小切換過程中存在的制動力沖擊。

圖2 混合貼閘/壓緊控制策略方案Fig.2 Hybrid shoe-approaching and braking control strategy
如圖3所示為混合貼閘/壓緊控制器的基本工作原理,具體詳細的切換規則設計過程將在后續的文章介紹。混合控制器的切換觸發條件由切換變量τ決定,該變量主要由閘瓦與閘盤接觸后的制動力Fz決定,?為閾值。混合貼閘/壓緊控制系統的最終控制律定義如下:

圖3 混合貼閘/壓緊控制切換原理圖Fig.3 Schematic diagram of switching of hybrid shoe-approaching and braking control
式中,QpL為貼閘控制模式下的系統輸入,QfL為壓緊力跟蹤控制模式下的系統輸入。
2.1 貼閘控制器
在本節,提出了一種雙閉環控制結構以便在存在擾動以及流量和壓力約束的情況下,實現電液制動系統最短時間貼閘和高精度跟蹤控制。控制器的具體結構如圖4所示。外環:為了實現最短時間的貼閘過程,在流量和壓力約束下,基于二階離散積分器設計一種在線最小時間貼閘軌跡規劃算法。以這種方式,當閘瓦的初始位置與終點位置誤差較大時,在滿足約束條件的情況下使再規劃后的貼閘軌跡xr(t)能夠以最快速度收斂至期望軌跡xd(t),保證了系統的快速瞬態響應;內環:為解決制動器的貼閘軌跡跟蹤問題,通過利用快速終端滑模控制來解決,進而實現有限時間響應和高穩態跟蹤精度。

圖4 最小時間貼閘控制方案Fig.4 Minimum-time shoe-approaching control scheme
2.1.1 最速貼閘軌跡在線規劃
閥控制動器的貼閘控制約束包括伺服閥的流量和油源壓力約束,這兩種約束可以轉化為制動器的速度和加速度約束,可以表示如下
式中,分別為制動器的速度下界和上界;x?-、分別為制動器的加速度下界和上界。貼閘軌跡規劃的約束設定取決于制動系統的性能參數。具體來說,考慮伺服閥的最大流量、制動器尺寸、內泄漏以及其他影響因素設計給出速度約束?和?;考慮到制動器活塞運動阻尼、負載慣性以及其他非線性摩擦綜合給出加速度約束和根據制動器流量連續性方程,設計制動器速度邊界為
式中:為滿足流量限制下制動器速度下界和上界;是制動器預設流量限制。根據制動器的負載力平衡方程,設計制動器加速度邊界為
式中,為滿足壓力限制下的制動器加速度下界和上界;p+L、p-L為盤式制動器預設壓力限制。制動器的綜合速度約束為
式中,為制動器的預設常數速度約束。制動器的綜合加速度約束由下式給出:
式中,為制動器的預設常數加速度約束。本文利用一種基于雙積分器的非線性濾波器實現貼閘軌跡在線規劃。再規劃貼閘軌跡可以在滿足速度約束式(12)和加速度約束式(13)的條件下,在最短時間內達到期望的參考信號。重新規劃貼閘軌跡xr的過程以在線優化問題的形式表示如下:
式中,T為控制系統的采樣周期,*(ktT)為*在kt個采樣周期時的值。xr(ktT)和的計算公式如下:
當kt=0時,初始狀態量滿足式(14)要求。本文利用文獻[18]中的非線性濾波器解決式(14)中的在線最優化問題,實現貼閘軌跡的再規劃。
2.1.2 非線性貼閘控制器
定義狀態跟蹤誤差向量ep=[ep1,ep2,ep3]T為
式中,αp1、αp2分別為狀態變量xp2和xp3的虛擬控制量。設計虛擬控制律αp1為
式中,kp1>0為反饋增益。對跟蹤誤差ep2求其關于時間的導數,結合式(6)和式(16)得到:
由式(18)可以得到虛擬控制律αp2為
式中,kp2>0為反饋增益,其大小對狀態誤差ep2的收斂速度有直接影響。利用式(6)和式(16)中的第3項,計算跟蹤誤差ep3關于時間的導數:
為提高系統的收斂速度與魯棒穩定性,利用快速終端滑模技術,設計全局快速終端滑模面s如下:
由于式(22)中包含負的分數冪(p1-q1)/q1<0,因此當es=0時存在奇異性問題。為解決式(22)中可能存在的奇異性問題,選用文獻[19]中的φ(*)函數對奇異項進行替換,式(22)可以改寫為
式中,α2>β2>0表示控制反饋調節增益,1<p<q表示奇數。
2.2 壓緊控制器
本節利用反步理論進行壓緊控制器設計,定義壓緊控制系統狀態跟蹤誤差為
式中,Fd為制動器的參考制動力信號,ef1為制動力跟蹤誤差,ef2為系統速度跟蹤誤差,αf1為濾波后一階虛擬控制律,αf2為濾波后的二階虛擬控制律。受限于篇幅限制,本節簡化壓緊控制器的推導過程,直接給出最終控制律為
中間控制律為
式中,>0,i=1,2,3為控制反饋調節增益。
2.3 自主切換策略
一般情況下,混合切換系統需要找到一個在任意切換點均是穩定的Lyapunov函數,但是找尋這樣一個函數是比較困難的,因此本文通過以制動力為反饋信號,選取合適的力閾值點?來制定切換規則,從而保證制動系統由貼閘控制切換壓緊控制時避免出現任何振蕩、極限環以及滑動等問題。然而,由于瞬態沖擊和瞬態振蕩可能會發生在某個邊界范圍內,因此在Fz=?時直接進行切換似乎是不太合理的。除了瞬態效應外,傳感器噪聲也會極大影響自主切換的性能。為了避免上述問題,相關研究人員提出了一種具有滯后性的非理性繼電器,即進行延遲切換,這使得在Fz=?點形成制動力容限層。這種基于滯回原理的切換邏輯可以描述為
系統的初始狀態為
式中,F?=Fz-?表示切換邏輯函數的輸入;?r為力切換點邊界。當τ=0時制動系統處于貼閘控制模式,τ=1時制動系統處于壓緊控制模式。值得注意的是,基于滯回原理的切換策略包含有不連續點,并在設定閾值點?進行切換,因此貼閘與壓緊控制器之間的變換沒有瞬時延時的現象發生。
3 穩定性分析
定理1針對制動系統式(6),選用全局快速終端滑模面式(21),設計控制律式(25)作為貼閘控制模式下的控制輸入,則貼閘控制系統是全局漸進穩定的。
證明選取Lyapunov函數V1為
對式(32)求其關于時間的一階導數,得到:
定義向量χ1=[ep1,ep2,s]T,矩陣Λ1=diag(kp1,,α2),式(33)可以改寫為
式中,l1=2 min{kp1,kp2,α2}。對式(34)兩端積分得到:
根據式(35)可知,當t→∞時,V1→0,進而可以得出,貼閘系統式(6)在選擇控制輸入式(25)的情況下能夠保證跟蹤誤差ep1、ep2,以及全局快速終端滑模面s漸進穩定,即貼閘系統是全局漸進穩定的。
定理2針對制動系統式(6),選用控制律式(27)作為壓緊控制模式下的控制輸入,則壓緊控制系統是全局漸進穩定的。
證明定義Lypunov函數V2為
求式(36)關于時間的導數,得到:
對式(37)兩端積分得到:
式中,l2=2 min{kf1,kf2,kf3}。根據式(38)可知,當t→∞時,V2→0。通過以上穩定性分析可知,針對壓緊系統式(6),采用控制輸入式(27)的情況下能夠保證跟蹤誤差,以及漸進穩定,即壓緊系統是全局漸進穩定的。
4 實驗研究
為驗證本文所提出控制器的性能,在所搭建的如圖5所示的單繩纏繞式提升系統進行試驗。
實驗臺的控制系統是基于Matlab/Simulink快速原型技術開發,該平臺可以提供高性能的主機目標原型開發環境,然后由主機上的Microsoft Visual Studio.net進行編譯,最后下載到目標計算機進行實時執行,系統的采用頻率為1 kHz。提升系統具體規格參數取值如下:制動器粘性阻尼系數B=7 500 N·s/m,油液彈性模量βe=1×109Pa,制動器內泄漏系數Ct=4.9×10-15m3/(s·Pa),制動器剛度系數kf=1.3×107N/m,制動器有效作用面積Ap=0.35×10-3m2,制動器總容積Vt=1.41×10-5m3,供油壓力Ps=7×106Pa,回油壓力Pr=0,活塞及負載質量m=0.95 kg。
對于本文所提出的礦井提升機制動瞬態沖擊抑制策略的控制參數主要包括3部分:(1)貼閘控制器參數kp1>0、kp2>0、α1>β1>0、α2>β2>0、q1>p1>1、q>p>1和γmin;(2)壓緊控制器參數kf1>0、kf2>0、kf3>0;(3)自主切換策略參數?和?r,這些參數的選擇過程如下所示。
步驟1根據仿真模型設定參數kp1、kp2、α1、β1、α2、β2、q1、p1、q、p和γmin的初值,其中kp1和kp2分別為狀態跟蹤誤差ep1和ep2的系數,其主要作用是調節線性收斂速度,增大kp1和kp2可以縮短收斂時間,但參數過大會引起系統的抖振,推薦取值為kp1∈[300,1 200]、kp2∈[200,800],且kp1>kp2。α1、β1、q1、p1決定es的收斂時間,其中α1為滑模面s中一次項es的系數,表示在遠離平衡狀態時起到主要的線性收斂作用;指數項|es|p1/q1sign(es)系數β1可以在接近平衡狀態時起到主要的指數收斂作用。因此,α1和β1共同決定了es收斂到平衡狀態的時間,通過增大α1和β1可以減小收斂時間,但是數值過大又會引起抖振現象,因此取α1=150、β1=0.1;q1、p1為指數項|es|p1/q1sign(es)的參數,其值對收斂時間的影響較為復雜,這里一般設定限制條件是q1、p1為正奇數,且p1<q1。α2、β2、q、p決定滑模面s的收斂時間,可以參考前文中α1、β1、q1、p1的設計原則進行取值;γmin為函數φ(*)的設計參數,其主要作用是解決奇異性問題,在|es|<γmin時,滑模面s切換至具有非奇異性質的滑模面,因此γmin的取值盡可能小。
步驟2根據仿真模型設定壓緊控制器參數kf1、的初值。kf1、kf2、kf3分別為狀態跟蹤誤差ef1、的系數,增大kf1、kf2、kf3可以提高制動力跟蹤精度并減小收斂時間,但是過大的取值又會引起系統的抖振問題。因此,推薦取值為∈[400,1 200]、
步驟3調節自主切換策略參數?和?r,?決定了切換點大小,其取值一般與制動力的目標值Fd相關,推薦取值為?=(0.3~0.5)Fd;?r主要作用是在切換點?形成容錯層,防止由于傳感器噪聲而引起的切換抖振問題,其取值取決于傳感器的精度、采樣精度和測量噪聲。
步驟4在實驗過程中,需要關注系統的響應時間、誤差大小、控制穩定性等指標,對控制參數進行微調,直至達到令人滿意的控制效果為止。
為驗證本文所提出控制器在減小貼閘時間和制動瞬態沖擊抑制方面的優勢,選擇以下對比方法。
(1)C1控制器 制動全過程采用本文2.2節所設計的壓緊控制進行制動控制。
(2)C2控制器 制動過程分為貼閘與壓緊控制,分別采用本文2.1節與2.2節所設計的控制器,貼閘軌跡參考曲線為xd。此外,兩種控制模式的切換過程為直接切換,以制動力Fz>0為切換點。
(3)C3控制器 本文所提出的混合貼閘/壓緊控制策。貼閘控制器參數為kp1=850、kp2=530、c1=100、p1=3、q1=5、p=3、q=5、α1=150、α2=150、β1=β2=1×10-3、γmin=1×10-4;再規劃軌跡初始設定速度邊界=[-0.2,0.2]m/s、初始設定加速度邊界=[-12,12]m/s、壓力限制[P-L,P+L]=[-5,5]MPa、伺服閥流量限制[Q-L,Q+L]=[-10,10]L/min;壓緊控制器參數為=770、=450、=220;制動力切換點?=1 000 N;制動力切換邊界點?r=500 N。
提升系統的制動控制策略選用恒減速制動,以卷筒轉角為反饋信號,采用PID控制器來獲取制動力參考信號。提升系統以1 m/s勻速下降,在提升高度為3 m處開始進行緊急制動,設定參考減速度為-0.5 m/s2,閘瓦初始位置xp0=-5 mm。實驗主要從制動器貼閘時間、最大制動力誤差以及提升鋼絲繩張力3個方面對C1、C2和C3的制動性能進行對比。
制動器閘瓦位置與制動力跟蹤曲線分別如圖6和圖7所示。可以看出,與C1相比,C3不僅使得貼閘時間大大縮短,而且制動力沖擊得到了較好的抑制。由于C1的貼閘時間取決于當前期望制動力、反饋增益和閘瓦間隙,增大反饋增益可以減小貼閘時間,但這樣會使得制動力出現振蕩,導致系統不穩定,在圖7(a)中體現的尤為明顯。C3將貼閘段設計為位置控制,對貼閘軌跡進行在線規劃,并利用快速終端滑膜控制實現閘瓦位置快速跟蹤,從而取得了較短的貼閘時間。盡管C2取得了最短的貼閘時間,但從圖7(b)和7(d)可以看出,C2的瞬態制動力誤差同樣是3個控制器中最大的。由于C2以階躍信號xd為參考信號,閘瓦在與閘盤貼合瞬間仍具有較大的速度,在很短的時間內使得制動力產生了較大的超調量,進而引起了制動沖擊現象。相較于C2,C3以圖6中再規劃曲線xr為參考信號,閘瓦在與閘盤貼合前開始減速,從而避免C2中存在的貼合前未減速的問題。從圖8可以看出,xr在加速度段和勻速段均滿足系統約束,這保證了貼閘時間上要求。此外,由于引入了滯后切換策略,使得制動系統較為穩定地切換至制動力閉環,避免了C2在Fz=0切換點上的抖振問題。
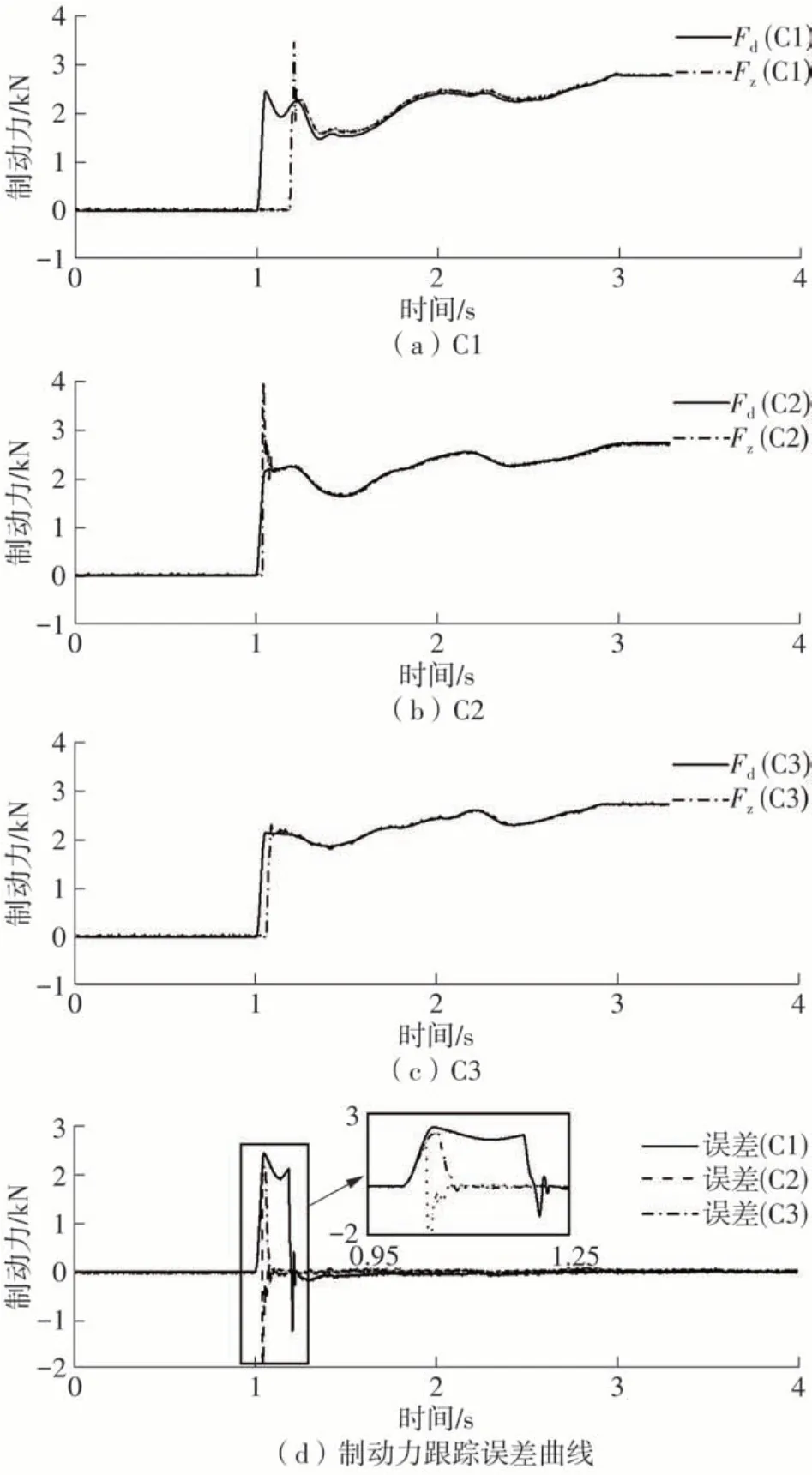
圖7 3種不同控制器制動力跟蹤曲線Fig.7 Braking pressure tracking curves with three different controllers

圖8 再規劃貼閘軌跡速度與加速度曲線Fig.8 Planned velocity and acceleration curves of the shoeapproaching trajectory
為了進一步說明本文所提出制動控制策略對提升系統的影響,對制動過程中提升鋼絲繩的張力進行了監測。從圖9可以看出,采用本文所提出的制動控制策略,可減小制動過程中鋼絲的張力值。為更清楚表現本文所提出控制器的優越性,將3種控制器的性能參數統計于表1。

表1 3種不同控制器的性能指標Table 1 Performance indicators with three different controllers
5 結論
針對單繩纏繞式礦井提升機電液制動系統,提出了一種制動瞬態沖擊抑制控制策略,在該策略中集成了具有滯后自主切換策略的混合貼閘/壓緊控制。當系統接收到制動命令后,利用貼閘控制器實現制動器的貼閘動作,在完成貼閘動作后,利用滯回切換原理使制動系統由貼閘控制穩態切換至壓緊控制。此外,在貼閘控制器設計中使用了一種基于二階離散積分器的在線貼閘軌跡再規劃方法,使得制動系統在流量和壓力約束下以最短時間完成貼閘動作。最后,通過對比實驗結果證明了本文所提出的混合貼閘/壓緊控制策略能有效抑制制動瞬態沖擊問題,減小制動空動時間,提高制動的安全性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26