基于STM32 的無位置傳感器無刷直流電機矢量控制系統
2024-05-06 08:11:22李克靖雷志強張繼
電子設計工程 2024年9期
李克靖,雷志強,張繼
(中國電子科技集團公司第五十八研究所,江蘇無錫 214035)
傳統的無刷直流電機(BLDCM)控制多采用方波驅動方案,利用位置傳感器檢測電機的轉子位置和轉速,然而運行效率較低,且在電機換相時常發生電流突變,產生較大的運行噪聲[1-2]。近年來,矢量控制在無刷直流電機的控制中得到了越來越多的應用,有效地解決了電機運行時的轉矩脈動問題[3-5]。然而,基于位置傳感器的矢量控制在檢測到轉子位置的同時也增加了控制系統的成本,同時可靠性降低[6]。在風機、空調等運行環境惡劣且對成本比較敏感的場合,采用無位置傳感器矢量控制已經成為一種新的趨勢[7]。
目前,無位置傳感器控制技術大致可分為:基于理想電機模型計算的方法、基于各種觀測器模型的算法、高頻注入估算方法以及人工智能估算方法[8]。其中滑模觀測器具有適應性強,對電機參數及負載擾動不敏感,動靜態性能好等優點。該文基于STM32 平臺,采用滑模觀測器對轉子位置和速度進行估算,設計了控制系統,在節約成本并縮減體積的同時保證了轉子電角度位置及轉速檢測的精度,是一種性能優異的控制方案。
1 無傳感器矢量控制系統工作原理
矢量控制在一個周期內利用PWM 占空比調節控制各個電壓矢量的時間,合成要得到的空間電壓矢量,使之盡量與電機的d軸保持垂直,產生的空間磁場接近于圓形磁場,進而減少電機d軸方向上的能量損耗[9]。
1.1 矢量控制坐標變換
坐標變換是矢量控制中的關鍵,利用等幅值變換把三相靜止坐標系模型轉換為兩相旋轉坐標模型。如圖1 所示,先利用Clark 變換把三相靜止坐標系變換到兩相靜止α-β坐標系,然后利用Park 變換得到兩相旋轉的d-q坐標系。
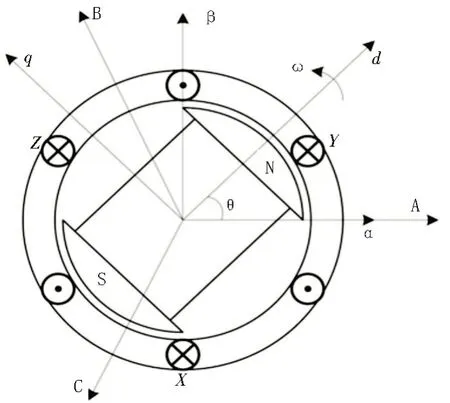
圖1 電機坐標系模型
對定子電流iA、iB、iC進行上述坐標變換,可得到旋轉d-q坐標系下的電流分量id、iq,變換公式可綜合如下:
式中,θ為A 相繞組軸線和電機d軸間的夾角。經過上述變換后,d軸與轉子磁鏈軸線重合,為勵磁軸,q軸為轉矩軸,實現了對定子電流的解耦,進而可以獨立地對磁通和轉矩進行控制[10]。
1.2 滑模觀測器估算轉子位置
在BLDCM 數學模型中,假設定子感應電動勢為正弦波,繞組電阻和電感值不變,同時忽略電樞反應,則α、β軸的定子電壓狀態方程可表示為[11]:
其中,反電動勢方程如下:
式中,iα、iβ分別為α、β軸的定子電流分量,uα、uβ分別為α、β軸的繞組電壓分量,R為繞組相電阻,L為繞組等效相電感,ψf為轉子磁鏈,ωe為電角速度。
根據式(3)可知,只要得到反電動勢信息就可以推算出電機的位置和轉速。為此可構造如下電流觀測器方程[12]:
傳統算法采用符號函數作為切換函數[13],如下所示:
式中,K為滑模增 益,Sα=-iα、Sβ=-iβ均為滑模面。
由于符號函數的不連續性,容易導致系統出現抖振現象。為了抑制系統抖振該文選用具有連續性的sigmoid 函數作為開關函數,其表達式如下:
式中,a為正實數,可通過它來調節切換速度的快慢,對系統的動態性能有較大改善。
開關函數會在估算出的反電動勢信號中引入高頻噪聲,為了將正確的位置和速度信息提取出來,給開關輸出信號增加低通濾波器,過濾掉高頻噪聲部分,從而得到光滑的反電動勢信號如下[14]:
式中,ωc為低通濾波器的截止頻率。通過對估算的反電動勢信號取反正切,即可得到轉子位置電角度,轉速值可通過對轉子角度取微分得到[15],具體公式如下所示:
通過低通濾波器得到的反電動勢會使轉子位置估算產生一定的相位滯后,且相位滯后會隨電機速度的增加而變大。故需要對估算的轉子位置角度進行相位補償,具體如下[16]:
估算角度加上補償量即可得到實際轉子角度。
2 系統設計與實現
2.1 系統設計方案
如圖2所示,控制系統包含以下功能模塊:FOC運算模塊利用Clark、Park、IPark 等坐標變換得到需要施加在三相上的電壓;逆變驅動模塊根據芯片輸出的PWM 調制信號驅動電機運行;相電流采樣模塊利用AD 轉換采樣得到實時的相電流;位置角度處理模塊通過滑模狀態觀測器估算出轉子位置及速度,并通過PLL 鎖相環來減輕滑模控制過程中產生的反電動勢抖振。
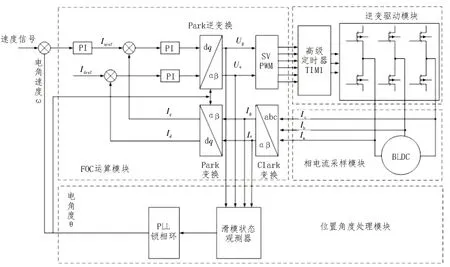
圖2 系統功能模塊框圖
2.2 硬件設計
系統采用廣泛應用于嵌入式工業控制領域的STM32 芯片,具體型號為STM32F103C8T6,該芯片基于Cortex-M3 內核,時鐘頻率達到72 MHz,有多個定時器及ADC 采樣通道,滿足電機控制的資源需求。
系統硬件電路的結構如圖3 所示。主開關器件為MOS 管,驅動電壓為15 V,芯片PWM 信號輸出端利用驅動電路抬升電壓,達到能夠驅動MOS 管的水平;驅動電路通過分立元件設計而成,相比集成芯片驅動可靠性高、成本更低,分立元件設計分為上橋和下橋電路設計,圖4給出了U相驅動電路設計原理圖;電流采樣利用價格低廉、采樣效果良好的SD06 集成運放設計差分放大電路,如圖5 所示,采樣電阻有電流通過時便會產生壓降,經過放大之后,輸入到主控芯片,進而通過ADC采樣結合放大倍數計算出電流值。

圖3 系統硬件結構圖
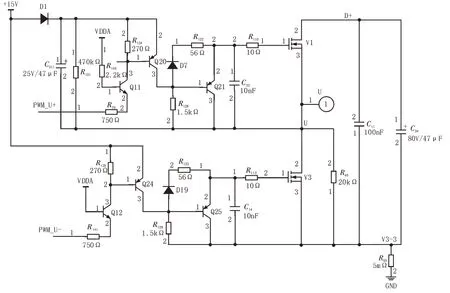
圖4 MOS管驅動電路圖
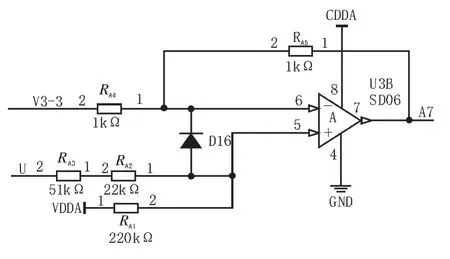
圖5 相電流采樣電路圖
2.3 軟件設計
圖6 為控制系統軟件設計流程。基礎功能和主循環為前臺程序,中斷處理函數為后臺程序。主程序完成芯片相關外設的配置、故障處理、系統狀態更新及電機的起停調速控制;中斷函數中完成電機控制相關功能,包括相電流采樣處理、坐標變換、滑模狀態觀測器估算轉子位置和速度,以及電流和速度PID 調節,最終生成PWM 控制信號。

圖6 軟件結構框圖
3 實驗結果及分析
系統測試平臺包括矢量控制器、無刷直流電機、J-LINK 仿真器、示波器等。測試所用電機參數如下:極對數為4,額定電壓為32 V,額定功率為100 W,額定轉速3 000 r/min。
對電機加以適當的負載,用示波器觀察三相PWM 及相電流波形,如圖7 所示,通道1、2、3 為芯片輸出的PWM 波形,通道4 為相電流波形,可以看出相電流為較規則的正弦波形,電流沒有明顯突變,可減少能量損耗從而提高電機的運行效率。

圖7 相電流波形圖
在無位置傳感器電機控制中,電機的啟動是關鍵難點[17-19],該文系統采用脈沖注入的方式準確完成初始轉子位置定位,進而通過開環加速切換到滑模觀測器進行閉環控制,其啟動加速曲線如圖8 所示,可以看出啟動及加速比較平穩,無倒轉和明顯過沖出現。
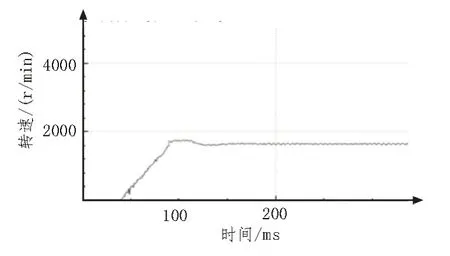
圖8 控制系統啟動加速曲線
4 結束語
該文針對無刷直流電機設計實現了一種基于滑模狀態觀測器的無位置傳感器矢量控制系統,可以準確地估算出轉子位置及速度進而實現矢量控制,同時采用速度電流雙閉環控制,保證了系統運行的穩定性。測試結果顯示,系統能夠較好地實現電機的啟停、調速,輸出轉矩平穩,采用矢量控制有效提高了系統的運行效率、降低了電機噪聲,有較高的市場應用價值。
