一種適用于濕地地形的植樹機器人設計*
2024-05-07 07:48:16胡俊澤陳柯良羅世維李雨婷
南方農(nóng)機 2024年9期
胡俊澤 , 余 江 , 陳柯良 , 羅世維 , 李雨婷
(1.廣東海洋大學機械工程學院,廣東 湛江 524088;2.廣東海洋大學機器人實驗室創(chuàng)新團隊,廣東 湛江 524088;3.廣東海洋大學電子與信息工程學院,廣東 湛江 524088;4.廣東海洋大學管理學院,廣東 湛江 524088)
0 引言
濕地具有復雜的生態(tài)系統(tǒng)和地形特征,其中紅樹林是最具有代表性的生態(tài)環(huán)境之一。紅樹林因其密集發(fā)達的支柱根而著稱,被譽為“海上衛(wèi)士”,能夠抵御臺風和海浪的侵襲,對沿海地區(qū)具有重要意義。然而,由于濕地地形的復雜性[1]和傳統(tǒng)植樹方法的局限性,紅樹林的保護和恢復面臨巨大挑戰(zhàn)[2]。盡管目前已經(jīng)存在一些植樹機器人,但它們主要適用于一般地形和樹木類型的種植,并未特別針對濕地地形和紅樹林的特點進行優(yōu)化設計。此外,傳統(tǒng)農(nóng)業(yè)機械也無法直接應用于紅樹林的種植和修復。
因此,本研究旨在設計一種適用于濕地地形的新型植樹機器人,結合紅樹林的地形與種植特點以及機器人技術,通過優(yōu)化結構設計,實現(xiàn)機器人在復雜濕地地形中的自動化和高效化種植。這種機器人可以提高種植效率、降低勞動成本并解決人力不足的問題[3],為紅樹林生態(tài)系統(tǒng)的保護和恢復提供重要技術支持。本研究對于推動濕地植樹機器人的技術發(fā)展具有重要的實踐意義和理論價值。
1 機器人整體介紹
1.1 機器人外形結構
機器人整體外形結構如圖1 所示,以鋁型材為基本搭建框架,采用12.9 級杯頭內(nèi)六角螺絲固定,銜接處以鑄鐵角碼輔助連接,更加緊固。此外,在部分受力結構如履帶承重軸,使用高碳鋼焊接方式連接,使其整體質(zhì)量盡可能輕量化,有助于防止陷入灘涂地,增強其靈活性。

圖1 機器人整體外形結構
1.2 機器人全流程執(zhí)行動作
裝載完樹苗的機器人在收到上位機指令后,先移動到指定的種植區(qū)域,再啟動自動植樹模式,開始自動種植樹苗。
首先由機器人中部的鉆頭向下鉆出待植樹的樹坑,然后機器人向前移動,當機器人底部的紅外光電傳感器檢測到樹坑時,機器人停止前進,緩慢移動調(diào)整至樹苗對準樹坑為止,此時,儲存苗倉的步進電機運作,將樹苗移動放入導向道,當檢測到導向道有樹苗進入后,導向道底部的門板打開,樹苗通過回填裝置的主體落入樹坑中,然后由壓泥板向下按壓存放在回填裝置中的泥土,泥土通過回填裝置上的圓孔卸往地面,填滿樹坑內(nèi)的空隙,夯實剛植入的樹苗。上述過程全部完成以后,機器人繼續(xù)移動,前往下一個合適的植樹點[4]。
2 機器人部分機械結構設計
2.1 履帶底盤機構設計
紅樹林的生長環(huán)境以沿海灘涂為主,機器人若以傳統(tǒng)滾輪作為行進機構,在行進過程中容易陷入泥土中,為了解決這一問題,在設計時使用履帶。履帶整體結構采取輕量化設計,負重輪由2 個主動輪和4 對從動輪組成,履帶底盤機構如圖2所示。

圖2 履帶底盤機構
該機構排布簡潔有序,后期裝配和零件更換更加方便,采用12.9 級內(nèi)六角螺絲和8 級法蘭螺母配合連接,在保證拆卸方便的同時也不失連接強度,履帶結構方面采用具有重量輕、強度高等優(yōu)點的橡膠履帶。
相比于傳統(tǒng)滾輪,履帶的接觸面積更大,可以有效降低機器人對地面的壓強,使其不易陷入淤泥之中,同時,履帶表面附有紋路、凹槽,可以大大增加機器人與地面接觸時的摩擦力,使機器人在運動過程中不易打滑,提高機器人對能量的利用效率。
如圖3 所示,履帶采用雙向可調(diào)節(jié)的張緊輪調(diào)節(jié)方式,主要作用是為履帶提供預張緊力[5]、延長履帶壽命、提高通過性能以及調(diào)節(jié)履帶的松緊程度。通過調(diào)整張緊輪的位置和張緊度,可以確保履帶與地面之間的接觸始終牢固,提供良好的牽引力和操控性。此外,適當?shù)膹埦o度還能減少履帶與其他部件的摩擦和磨損,延長履帶的使用壽命。根據(jù)不同的地形和工作條件要求,調(diào)整張緊度可以改變履帶與地面的接觸表面積和壓力,從而提高車輛的通過性能。同時,根據(jù)行駛速度、工作負荷或路面條件,調(diào)節(jié)張緊輪能夠改變履帶的松緊程度,以適應不同的工作環(huán)境。
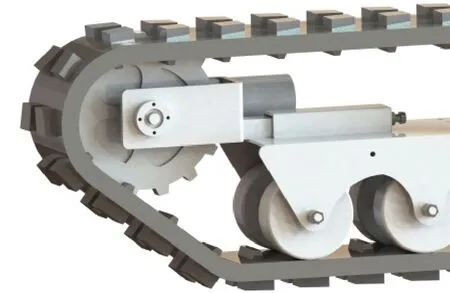
圖3 履帶張緊輪調(diào)節(jié)部分
憑借履帶的大輪徑優(yōu)勢,機器人可輕松越過石塊、灘涂、水坑等障礙物,而如果遇到無法越過的障礙物,機器人會通過視覺識別,并通過Mesh 技術發(fā)送信號到終端[6],分析計算后,自動調(diào)整行進方向。如果機器人因側(cè)翻等因素導致無法運動,會向外發(fā)送求救信號,等待技術人員前來檢查與維修。
2.2 鉆孔機構設計
鉆孔機構如圖4 所示,主要由電機直角固定板、永磁直流有刷電機、螺母螺絲、大扭力推桿、鉆機鉆頭組成。該結構主要需完成的工作是對濕地進行鉆孔,由上述組成部分互相配合使鉆機鉆頭縱向移動。鉆機鉆頭的動力來源于永磁直流有刷電機,其具有體積小、效率高、結構簡單、用銅量少等優(yōu)點。有刷電機帶動鉆頭高速轉(zhuǎn)動,大扭矩推力推桿使得鉆頭跟隨下底板縱向移動開始鉆土。在鉆出一個深度適宜的孔后,鉆頭暫時停止轉(zhuǎn)動,豎直向上移動,而后重新開始轉(zhuǎn)動,將附著在鉆頭上的泥土甩出鉆頭,并在孔的周圍形成圓環(huán)狀土堆,工作結束。

圖4 鉆孔機構
2.3 導苗機構設計
導苗機構如圖5 所示,主要由圓管、大扭矩推力推桿、小型推桿、金屬管卡、螺絲螺母、鏟頭與推桿固定架等組成。其中,圓管、小型推桿、開合器與推桿固定架組成導苗管;鏟頭與導苗管相連接后固定于螺母固定件上,使得鏟頭能在一定方向上直線移動;大扭矩推力推桿的一端固定于車體上,另一端固定在導苗管上。工作時,先從儲苗倉取出樹苗置于導苗管中,然后縱向移動將樹苗送入鉆孔結構事先挖好的孔洞中,而后再通過小型推桿將鏟頭打開,接著將鏟頭移出孔洞,整個結構豎直向上移動,工作結束。

圖5 導苗機構
2.4 覆土機構設計
覆土機構如圖6 所示,主要由加工后的鋁板、加工后的4040 鋁型材、2020 鋁型材、十字連接板、踏板以及雙軸舵機組成。在送苗機構移出孔洞后,雙軸舵機便會驅(qū)動由鋁板、鋁型材、十字連接板組成的平行四邊形連桿機構運動,控制踏板上下運動,將樹苗徹底壓入土中并壓實。

圖6 覆土機構
2.5 儲苗倉機構設計
儲苗倉機構如圖7所示,將其進行可堆疊化設計,目的在于提高儲苗量,同時實現(xiàn)更高的空間利用率。該機構將樹苗的頭部放入滑槽,尾部緊貼內(nèi)壁,以實現(xiàn)對樹苗的儲存。其運行方式為由舵機旋轉(zhuǎn)帶動十字送料板將樹苗送入導苗筒中,在重力的作用下,下一棵樹苗會來到前一棵樹苗的位置,重復以上操作,儲苗倉功能結束。該儲苗倉機構最大的亮點是能夠安全堆疊,節(jié)省空間,并提供更大的儲存容量。這不僅可以提高農(nóng)業(yè)生產(chǎn)效益,還可以減少倉儲成本和占地面積。儲苗倉的可堆疊設計還方便運輸和搬運,可提高樹苗運載量,并且便于管理和組織苗木。通過這種設計,可以使種植更加高效,實現(xiàn)可持續(xù)發(fā)展。

圖7 儲苗倉機構
3 機器人機電一體化控制部分設計
3.1 嵌入式系統(tǒng)下位機設計
嵌入式系統(tǒng)下位機為系統(tǒng)的底層,用于執(zhí)行控制、數(shù)據(jù)處理和設備驅(qū)動等任務。具體為接收上位機發(fā)出的信號控制各個功能部件執(zhí)行命令以及采集各個傳感器部件的信息發(fā)送回上位機。其中,還需有連接各個傳感器與MCU 的PCB 以及調(diào)試部分,MCU選擇性能強大、引腳口較多的STM32H750VBT6。
3.1.1 PCB設計
PCB 在電子設備中扮演著關鍵的角色,它提供了電氣連接、機械支持、電氣隔離、信號分配、散熱、封裝、組裝和維修等功能,同時有助于節(jié)省空間和提高設備性能[7]。該部分的設計邏輯主要為引出MCU 的I/O 口,方便各個傳感器與其直接連接,簡化線路。
3.1.2 程序設計
程序的編寫邏輯主要通過串口通信與上位機進行實時數(shù)據(jù)傳輸[8],內(nèi)部封裝有串口接收函數(shù),當接收到數(shù)據(jù)后,會有一個執(zhí)行函數(shù),對接收到的數(shù)據(jù)進行譯碼操作,針對破解的譯碼會有對應的執(zhí)行函數(shù),由此便可根據(jù)上位機發(fā)送的數(shù)據(jù)執(zhí)行相應操作。
發(fā)送數(shù)據(jù)同理,發(fā)送與其接收數(shù)據(jù)包相同的數(shù)據(jù)串,上位機進行接收并通過譯碼獲得各個傳感器返回的數(shù)值,再通過二次譯碼得到環(huán)境監(jiān)測傳感器的具體數(shù)值。
3.2 嵌入式系統(tǒng)上位機設計
該部分主要用于接收控制終端發(fā)送的指令,并通過譯碼將需要轉(zhuǎn)述給下位機的指令通過串口通信轉(zhuǎn)述給下位機,進而實現(xiàn)通過控制終端控制機器人;同時,也負責將采集到的數(shù)據(jù)反饋給控制終端。所使用的MCU 為樹莓派4B,該硬件使用較為方便,可參考項目較多,大大降低了開發(fā)難度[9]。
3.3 服務器端設計
該部分主要用于對所有環(huán)境數(shù)據(jù)進行統(tǒng)計,最終呈現(xiàn)出生長情況最好的環(huán)境條件發(fā)送給客戶端;對輸入的畫面進行算法解算,并根據(jù)客戶端要求規(guī)劃路徑發(fā)送給上位機;對接客戶端,與人直接進行交互。
從廣義上來講,服務器端可充當機器人的大腦部分,上位機可類比為神經(jīng),下位機可類比為脊椎,各傳感器可類比為感官,所有指令都由操作人員經(jīng)由客戶端發(fā)出,做到遠程控制多臺機器人[10]。
4 總結與展望
本研究深入探討了一種專門針對濕地地形,特別是紅樹林灘涂區(qū)域的全自動植樹機器人設計。通過對其特殊結構,包括行進機構、鉆孔機構、樹苗安放機構以及泥土回填機構的詳細設計闡述,本研究展示了該機器人在種植紅樹林幼苗過程中的高效性和靈活性。與傳統(tǒng)的植樹機器人相比,這種新型機器人的設計更符合濕地地形的工作需求,其快速回土的能力也顯著提高了樹苗的成活率。此外,該機器人的設計還考慮到了對不同尺寸樹苗的適應性,使其應用范圍更加廣泛。
隨著科技的不斷進步和人們環(huán)保意識的增強,未來的植樹機器人將會更加智能化和高效化。對于紅樹林種植修復事業(yè)來說,未來的研究方向可能會集中在如何進一步提升機器人的自動化程度,例如通過引入更多的傳感器和智能化算法來實現(xiàn)對環(huán)境的精確感知和適應。此外,將機器人技術與其他生態(tài)修復技術相結合也十分重要,例如利用無人機進行種子的精確投放,利用生物技術提升樹苗的生長速度等。最后,對于種植機器人來說,如何實現(xiàn)在復雜地形中的高效移動和精確操作,將是未來研究需要解決的關鍵問題,這可能需要通過引入更先進的導航和控制技術來實現(xiàn)。
猜你喜歡
歌海(2024年6期)2024-03-18 00:00:00
兒童故事畫報·自然探秘(2022年3期)2022-04-27 00:17:10
幼兒園(2021年4期)2021-07-28 07:38:04
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
瘋狂英語·初中天地(2018年6期)2018-11-24 02:39:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
歌海(2018年4期)2018-05-14 12:46:15
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16