農業采摘機器人機械臂結構開發與試驗研究
2024-05-07 07:48:16趙偉冬
南方農機 2024年9期
趙偉冬
(西安交通工程學院,陜西 西安 710300)
現階段工業機器人已經擁有了較高的自動化水平,而農業采摘機器人作為現代新興的機械設備仍處于研究階段[1]。農業機器人包含的部件類型多種多樣,機械臂便是其中十分重要的一種。為了使得農業采摘機器人可以更好地滿足不同環境與工況下的應用需求,國內外許多專家、學者都針對農業采摘機器人進行了深入的探究[2]。美國、澳大利亞等國家學者希望通過視覺傳感器建立準確、高效的農產品自動識別系統,著重解決水果、蔬菜等無人化采摘問題;我國的專家學者根據水果、蔬菜等不同農產品的特征與作業要求,提出了采用機械臂完成農業作業。基于此,進一步加大對農業采摘機器人的研究力度,創新與改進機械臂結構,開發設計出更加高效的新型技術,尤為重要。
1 機械臂機構原理
1.1 機械臂運動求解
機械臂動力學分析需要從兩個方面進行,即正運動學分析和逆運動學分析[3]。從農業采摘機器人機械臂的運動學分析層面來看,其機械臂運動求解的目的是希望得到機械臂正運動學與逆運動學兩種運動的結論[4]。在機械臂實際運動過程中,機械臂關節空間和機器人工作空間有著較為緊密的非線性映射關系,并且這種關聯還和機器人尾端執行設備位姿密切相關,總的來說,機械臂關節空間和工作空間的運動學關系如圖1所示。
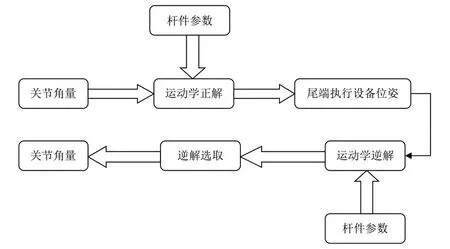
圖1 機械臂關節空間和工作空間的運動學關系
機器臂結構關節以相應姿勢進行運動時,正機械臂的尾端位姿與逆機器臂的尾端位姿在位置上存在一定的關聯性,和其相匹配的動力學模型關系重點體現在以下幾個方面。
1)當農業采摘機器人機械臂的尾端位姿是明確的,這時結合各個關節的運動學工作原理,能夠得到機械臂相對應的運動學方程,如式(1)所示:
公式(1)中,表示齊次變化矩陣,θi表示機械臂不同關節轉動的角度。
2)把和θ1相關的運動學變化矩陣變化到運動學方程的左側,這時能夠獲得公式(2):
1.2 運動學數學建模
從數學建模層面來分析,機械臂從之前的關節空間轉化到尾端笛卡爾空間,實質上體現的是機械臂的正向運動學情形[5]。基于機械臂數學坐標系能夠獲取到不同關節的轉動角度,在此前提下能夠獲得機械臂尾端坐標系的準確位姿。假設機械臂連桿的齊次變化用矩陣A來體現,這時能夠獲得如式(4)所示的代數矩陣[6]:
因為機械臂的每個關節均是能夠任意角度轉動的,因此將其規劃成5 類變化矩陣,即A1~A5,這時可獲得機械臂尾端的齊次變化矩陣,如式(5)所示:
公式(5)中,各個不同類型r表示機械臂尾端關節坐標系X軸、Y軸以及Z軸三個方向的余弦,px、py以及pz分別代表機械臂尾端關節在X軸、Y軸、Z軸原點的坐標。這時能夠獲得中各個矩陣元素的數據,如式(6)所示:
1.3 機械臂笛卡爾空間軌跡設置
在實際進行機械臂笛卡爾空間軌跡設置過程中,選取機械臂的中間位置點,同時將插補算法應用到該點坐標核算中,這時可以獲得機械臂的位姿,之后把中間點機械臂的位姿變化為與之相匹配的關節角,從而在機械臂尾端處確定好關節角的控制策略,最終完成機械臂笛卡爾空間軌跡設置[7]。機械臂位姿控制流程如圖2所示。
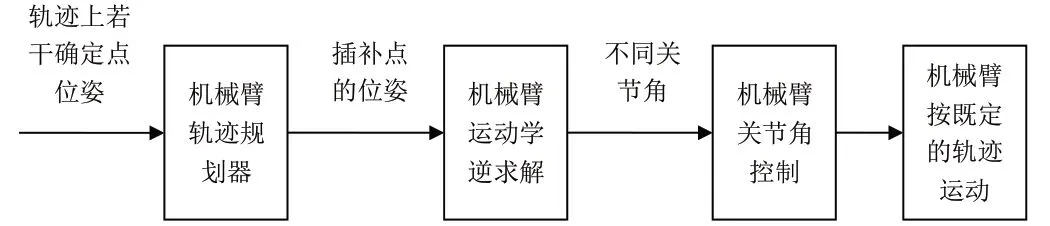
圖2 機械臂位姿控制流程
2 機械臂結構開發和設計
本研究中機械臂結構使用的是雙關節串聯,總共包含了6 個自由度,涵蓋了視覺模塊、驅動模塊以及控制模塊等。具體來說,控制模塊涵蓋了電機、視覺系統以及開關等多種模塊[8]。采摘機器人機械臂尾端的夾持裝置處設置有兩個串聯的圓柱形橡膠塊,同時將視覺傳感器以及編碼器等放置在橡膠塊上。末端夾持裝置以伺服電機為動力單元,帶動夾持裝置圓桿旋轉,進而將物體穩固夾持起來。因為農業采摘機器人的工作環境多為戶外,環境條件不好,為了確保采摘機器人能夠穩定工作,可在機械臂上設計噴霧機構,實現對抓取目標的清洗。機械臂在實際工作過程中,為了避免較大外力對其造成損傷,在其尾端夾持裝置上設計限位器。在視覺和驅動模塊中間規劃有包含電動機和減速機的傳動裝置;在機械臂尾端的夾持裝置和視覺模塊中間規劃有包含電動機和油缸的傳動裝置;為了更好地降低采摘過程中的振動,機械臂底座和機械臂連接位置設計有減震墊。另外,由于農業果實的硬度存在較大差異,在機械臂各個關節處給予了不等的力矩,以改善果實采摘的質量[9]。
3 試驗驗證與分析
3.1 機械臂尾端執行機構的運動數據
在進行機械臂結構設計的過程中,尾端執行機構的運動數據是十分重要的參數[10]。結合機械臂尾端執行機構的運動空間與力學性能等,選取科學的關節轉動角,在此基礎之上得到機械臂尾端執行機構最大運動位置。若機械臂關節轉動角速度是800°/s,可以確保末端執行機構能夠穩定地夾持住果實,并在運動中不會出現掉落情況。事實上,機械臂尾端執行機構與相應關節的轉動角速度之間有著緊密的聯系。當機械臂手指轉動角速度是800°/s 時,對應的轉動角度是180°,并且需要施加的力矩大小為10.2 N·m;當機械臂手指轉動角速度是1 200°/s 時,需要施加的力矩大小為13.5 N·m,這種設計可以滿足機械臂尾端執行機構的運動需求。就農業種植方面而言,西紅柿是最為常見的垂直面栽培作物。因為西紅柿花與葉的生長規律并不統一,導致西紅柿果實通常出現在莖葉外側,農業采摘機器人可以較好地實現對這種類型作物的采摘。然而,因為西紅柿存在多個品種,還需要針對不同西紅柿進行差異化設置。例如,正常西紅柿的果實數量為4 個左右,但櫻桃西紅柿的果實數量能夠達到十幾個。因此,為了能夠獲得更快的采摘速度,應當要注意規劃適宜的采摘方案。
3.2 機械手抓取精度
農業采摘機器人通過控制機械臂動作來實現對目標物體的精準抓取,當定位誤差較大時,極易造成機械手無法準確抓取到目標。為了更好地驗證本研究中設計的農業采摘機器人機械手的抓取精度,把機械臂和移動平臺放置到離目標物體2.5 m 位置處開展抓取試驗,從而驗證機械手的實際抓取精度。本機械臂尾端的機械手是一種雙指夾持型結構,能夠在較小工作空間內使用,同時可以滿足不同規格目標物體的抓取要求。試驗結果表明,機械手夾持裝置通過平移方式運動到旋轉關節時,機械臂尾端點的運動位置和理論位置之間的誤差值未超過0.01 mm。從而可以看出,本文開發的農業采摘機器人6 自由度機械臂結構能夠適應實際的使用空間與運動范圍,擁有很高的運動精度,可以滿足農作物果實采摘要求。
4 結語
本研究基于動力學原理創設了數學動力模型,實現了對農業采摘機器人機械臂的開發和控制,該機械臂能夠滿足不同類型農業果實的采摘要求。仿真結果表明,該機械臂能夠準確定位待抓取目標,并且可以順利完成抓取動作,機械臂尾端點的運動位置和理論位置之間的誤差值未超過0.01 mm。
猜你喜歡
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
今日農業(2021年14期)2021-11-25 23:57:29
今日農業(2021年13期)2021-08-14 01:38:18
今日農業(2020年15期)2020-12-15 10:16:11
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29