基于漁業養殖的清道夫型仿生機械魚設計
2024-05-07 07:48:20賀雙旭滕小祺應晟斌
南方農機 2024年9期
易 娜 ,賀雙旭 ,滕小祺 ,應晟斌
(浙江長征職業技術學院,浙江 杭州 310023)
0 引言
我國養殖產量居世界第一,其中以螃蟹、蝦和牡蠣養殖為最。水產養殖對水質、水深、含氧量等都有一定要求,以螃蟹、蝦、牡蠣養殖為例:螃蟹喜歡生活在河灘上的洞穴和沙石水草中,水流不能急,不能有風和陰涼,水深需要l m以上、水質清潔;魚蟹混養是池塘養蟹的一種模式,要求水質干凈,能夠有0.3 m左右透明度;養殖南美白對蝦適宜深度在1.5 m~2 m,排水系統良好,水質干凈且溶氧量高;牡蠣養殖需要選擇潮流暢通、餌料豐富、風浪平靜、水深在4 m 以上、鹽度較低的海區。人工養殖時,由于成本和技術原因,往往放養密度較大,水面又較小,因此除了增加增氧設施外,還需要一種小型設備,在不驚擾水產的情況下,可以近距離地觀察其活動、生長和吃食等情況,養殖戶可以據此立即進行投料、換水等。仿生機械魚是將仿生學結合到漁業養殖領域,使監測設備模擬魚類游動,其小體積、高靈活性、低污染、無擾動的特點,使其能在不同的水域環境中進行水下監測。所設計的清道夫型仿生機械魚主要用于水下漁情分析、定位、查詢和水下觀光[1-10]。
1 清道夫型仿生機械魚主要性能指標和功能
清道夫型仿生機械魚性能指標如表1 所示,主要功能如下。

表1 清道夫型仿生機械魚性能指標
1)隱形。仿生清道夫魚型設計在任何狀態下都不會驚擾養殖水產。
2)動力。由螺旋槳轉動結合舵面轉向產生推力和方向控制。
3)動態監測。能夠隨時工作,看清水下情況,便于觀察水產活動、生長和吃食情況。
4)水下檢查。能夠進行水質探測,近距離觀察所投喂的飼料、藥品以及水產的食用情況,防止外來物種入侵或人為惡意投毒。
5)搭載掛鉤。可實現近距離精準投料,觀察水產的喜好。
6)可擴展接口。可實現搭載多種搜尋、探測傳感器,實現機器快速就位,查明水域深度、水下溫度、水壓、水流方向、流速和水質等情況。
7)配備照明顯示控制系統。可實現對水下圖像的還原、增強、處理功能,可適應各種復雜黑暗水域的工作。
2 設計的基本思路
根據研究背景,本產品設計重點聚焦在螃蟹、蝦、牡蠣的養殖和農業觀光的角度,在此基礎上進行相關潛水器設計。
2.1 整體設計
仿生機械魚的整體設計需要解決以下問題。
1)結構問題。根據伯努利原理,仿生機械魚的外形采用流線型結構,使其在運動中可以有效減少水的阻力,從而節約能源。在進行仿生設計時,該問題是必須要考慮的因素。
2)動力控制問題。為了保證仿生機械魚能夠實現直線運動、左右轉彎、上浮和下潛等各種游姿,需要探究仿生機械魚的有效動力與控制策略,用不同的“電機+螺旋槳”來進行方向控制。
3)實時通信問題。實時通信是仿生機械魚水下運動和陸上控制平臺的連接橋梁,它可以實時把仿生機械魚游動采集到的數據和電機的運轉情況傳送到控制平臺,同時能夠將傳感器收集的信息傳遞到控制平臺。
2.2 局部設計
1)外形結構設計。如圖1 所示,根據伯努利原理,仿生機械魚的外形采用流線型結構,目前大部分潛水器是類似于潛艇的回轉細長體[10]。隨著仿生技術的不斷發展,仿魚類形態甚至是運動方式的潛水器將會不斷發展,本設計主體結構為流線型回轉細長體,仿生機械魚外觀如圖2所示。
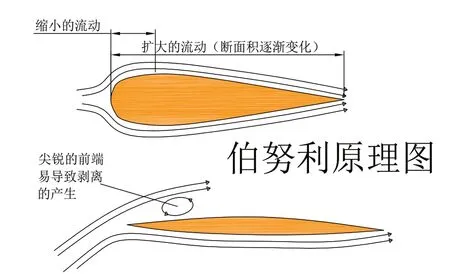
圖1 伯努利原理

圖2 仿生機械魚外觀
2)動力與運動設計。為了保證仿生機械魚能夠實現直線前進與后退運動、左右轉彎、快速上浮和下潛等各種游姿。本設計采用三臺電機提供動力,其中兩臺安裝在仿生機械魚尾部,通過電機的正反轉實現機械魚的前進與后退、左右轉彎運動;另一臺電機安裝在仿生機械魚的中部重心處,并從中設置通道,通過電機的正反轉和傘齒輪傳動機構實現魚的上浮和下潛運動,該部分采用密封防水設計。仿生機械魚裝配如圖3所示,遠程遙控器外觀如圖4所示。

圖3 仿生機械魚裝配

圖4 仿生機械魚遠程遙控器外觀
3)控制部分設計。本設計通過遙控的方式實現對三臺電機的控制,控制部分采用密封防水設計。清道夫型仿生機械魚電氣原理如圖5所示。

圖5 清道夫型仿生機械魚電氣原理
4)通信單元設計。本設計的通信單元主要用于水下圖形、圖像的反饋,采用剛性有線電纜拖曳的方式進行通信,此部分采用密封防水設計。
5)附件設計。如圖6 所示,仿生機械魚在頭部設計有魚餌鉤、磁力吸盤、探頭輔助器、固定器等附件。對于重量較輕和體積較小的物件可以在發現后直接獲取。頭部的連接與仿生機械魚的結構骨架是整體,不影響仿生機械魚的強度。

圖6 仿生機械魚附件
6)照明單元設計。在攝像頭周圍設計有6 個LED燈,并可調節亮度,本部分采用密封防水設計。
7)材料設計。除了電氣和動力部分外,其余材料采用ABS塑料或PS 塑料,以減輕重量,節約能源。
2.3 關鍵技術
本課題研究背景和設計思路決定了產品的關鍵技術,重點在以下方面。
1)仿生技術。依據伯努利原理,為減小運動中的水阻力,潛水器的外形采用流線型魚形設計。
2)材料技術。由于其重點應用在水產養殖和農業觀光,對長時間水下作業有要求,考慮到具體作業環境,作業時間至少需要30 min 以上。因此,仿生機械魚的主體材料需要選用密度小、耐海水腐蝕、噪聲小的輕質復合材料。
3)通信技術。由于螃蟹、蝦、牡蠣的養殖水深最多只有4 m~5 m,為了有效監測、傳輸數據,本項目的通信方式主要采用雙絞線電纜,成本低、響應快,選擇長度為15 m 的電纜。
4)密封技術。本課題應用背景決定了該產品在0.5 h 水下作業能夠滿足要求。難點在于水下航行時不能短路,因此,產品的防水密封很重要。
上述技術在本設計中均有采用。至于智能控制技術、水下目標探測與識別技術以及水下導航(定位)技術等非本項目重點,在本設計中沒有采用,可在應用中視市場需要酌情開發。
3 理論設計計算
本研究設計的仿生機械魚體積不大,但由于結構原因自身具有一定的質量(200 g),在水下運動速度不需要太快。考慮到水下作業需要六向移動,故而在設計時主要考慮的因素是整體質量、直流電機轉速、螺旋槳尺寸等產生的推力。通常一個螺旋槳在不同轉矩的電機下產生的推力不同,不是越大越好,也不是越小越好。直接影響螺旋槳性能的主要參數如下。
1)直徑D:相接于螺旋槳葉尖的圓的直徑。通常,直徑越大,效率越高,但直徑往往受到吃水和輸出轉速等限制。
2)槳葉數N。
3)轉速n:每分鐘螺旋槳的轉數。
4)螺距P:螺旋槳旋轉一周前進的距離,指理論螺距。
5)滑失率:螺旋槳旋轉一周,仿生機械魚實際前進的距離和螺距的差值與螺距之比。
6)螺距比:螺距與直徑的比(P/D),一般在0.6~1.5。通常,高速輕載船選取的值比較大,低速重載船選取的值比較小。
7)盤面比:各槳葉在前進方向上的投影面積之和與直徑為D的圓面積之比。通常,高轉速的螺旋槳所取的比值小,低速、大推力的螺旋槳所取的比值大。例如,拖輪的螺旋槳盤面比大于1.2,甚至更大的情況也不少見。
對于仿生魚等小型潛水器而言,可以參考公式(1)。
式中:F推力—螺旋槳推力,單位N;D—螺旋槳直徑,單位cm;S—螺距,指螺旋槳旋轉一圈推動距離,單位cm;L—螺旋漿寬度,單位cm;N—電機轉速,單位rad/s;P—大氣壓力(1 標準大氣壓,1 000 m 以下基本可以取1);f—經驗系數(0.000 25)。
本項目螺旋槳直徑1 cm,螺距30 cm,螺旋漿最大寬度0.5 cm,直流電機轉速30 rad/s,計算可得:
F推力=(D×S×L×N2×P×f×1 0)×9.8/1 0 0 0=(1×30×0.5×302×1×0.000 25×10)×9.8/1 000=0.33 N,如果前進和后退采用兩臺電機同時作用,則可產生推力F推力=2*0.33=0.66 N。
由上述計算可知,上浮下潛用一臺電機能產生0.33 N 的推力,前進和后退兩臺電機能產生0.66 N的推力。由于物體在水中或多或少都會產生浮力,所以本項目設計中只要電機選用合適,就符合設計要求。
4 使用方法及使用性能分析
4.1 使用方法
1)提前1 h 將仿生機械魚充好電,如果需要投喂餌料,也要提前備好。
2)把清道夫型仿生機械魚的數據線連接到手機顯示屏或電腦顯示器等設備上。
3)將遙控器及手機通過連接器整體裝配起來,如圖7 所示,成為一個整體,調節旋鈕開關檢查燈光是否正常。

圖7 清道夫型仿生機械魚全套系統
4)將清道夫型仿生機械魚放入水中,在所需的水域進行探索,尋找水產;操作人員可在岸邊或船上操作遙控器,通過屏幕確定仿生魚的姿態和行進方向來搜索并觀測水產;也可利用其頭部掛鉤鉤住餌料(藥品)觀察水產吃食的情況;當水中亮度不足時,可調節旋鈕開關打開燈光進行補光。
4.2 性能分析
如圖8 所示,經過實際下水測試,清道夫型仿生機械魚的結構合理,采用可拆卸零部件,水密性好;整套系統的可裝配性與工藝性好;操作簡單方便。圖9(a)、圖9(b)分別是用本裝備觀察白天和夜間水下漁情的照片。

圖8 下水測試現場

圖9 水下漁情
5 創新點
1)采用了清道夫魚的流線型輪廓。一方面,水阻低,可節約能耗;另一方面,在進行漁情調查或水下環境調查時,隱蔽性強且不易被其他品種的大魚食用。
2)水下可視化。仿生清道夫魚自帶照明和水下探頭,當水中能見度低時,可以人為調節光源亮度,以看清水下狀況,適用于所有水下場景。
3)仿生機械魚頭部的附件可進行拆卸、改裝和擴展。可實現使用不同的餌料喂養水產的功能。
6 結語
清道夫型仿生機械魚具有適用面大、成本低、能耗小、運動范圍廣、能在機動性能要求比較高的水下環境工作等優點,使用它可以進行水下漁情分析、定位、查詢,且具有水下觀光等功能。但智能控制技術、水下目標探測與識別技術以及水下導航(定位)技術等非本研究重點,在設計中沒有采用,后期可根據產品在應用市場中的需要酌情開發。該產品市場化后成本不高,銷售價格也不高,符合農村市場購買力。
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
現代裝飾(2020年7期)2020-07-27 01:27:42
當代工人(2020年8期)2020-05-25 09:07:38
流行色(2020年1期)2020-04-28 11:16:38
電腦報(2019年40期)2019-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09