輕量便捷化的停車場反向尋車系統設計
2024-05-12 11:28:10陳黎明張帥吳夢帆
電子產品世界 2024年1期
陳黎明 張帥 吳夢帆
摘要:為解決大型室內停車場尋車難的問題,某些大型停車場會設置智能尋車系統來幫助用戶尋找車輛, 但采用的設備往往成本較高,且使用過程煩瑣。基于此,提出了一種輕量化、便捷化的大型室內停車場反 向尋車方案,將輕量化的反向尋車系統與普及率高的微信小程序進行結合。用戶尋車時只需要用微信掃描 尋車小程序二維碼并輸入車輛和位置信息,然后通過系統的 A* 算法生成一條靜態的最短尋車路徑,并將其 推送給用戶,以實現尋車目的。
關鍵詞:反向尋車系統;微信小程序;A* 算法;最短路徑
中圖分類號:TP391.44;U491.71文獻標識碼:A
0 引言
據公安部辦公廳統計處統計,截至 2022 年底, 我國機動車保有量為 4.17 億輛,機動車駕駛人數 量為 5.02 億人 [1]。隨著汽車數量的日益增多,一 些停車場的規模也越來越大,尤其是大型商場的地 下停車場。大型室內停車場停車位的增多給用戶尋 車帶來一定程度的困難。針對尋車難的問題,國內 外研究者提出并開發了一些新技術。在國外,德 國 Serva Transport System GmbH 公司開發了一款名 為 Ray 的自動泊車機器人和自動泊車系統,用戶 只需要將車停放在車輛入口處,泊車系統掃描車輛 后會激活泊車機器人,由其駕駛車輛并分類存入中 轉站,車主取車時,相應泊車機器人將車輛從中轉 站中取出并送達指定位置 [2]。在國內,北京大興國 際機場引入了智能泊車機器人,停取車都是由機器 人來完成,大大方便了車主 [3]。此外,國內許多學 者基于互聯網等技術提出了一些新的解決方案。例 如,將反向尋車系統與智能手機、定位技術和地圖 服務技術等進行結合,以便對車輛進行定位,實現 反向尋車;將反向尋車系統建立在 AR 技術之上, 將虛擬導航技術與實際停車環境進行結合,讓用戶 能夠感受到更好的交互性 [4-5]。但以上應用和研究 均需要使用一些價格高昂的電子設備,且需要定期 維護和升級,因此增加了停車場建設和運營的成 本。除此之外,部分研究還需要基于停車場具有較 好的網絡信號,并且需要下載 APP,導致用戶使用起來較為煩瑣。因此,本文設計了一種基于微信小 程序、輕量化、便捷化的反向尋車系統,有助于尋 車系統在二、三線城市的推廣使用。
1 系統功能概述及總體方案設計
1.1 系統功能及特點
本文設計的反向尋車系統具有車輛信息采集、 停車到位檢測、數據無線通信傳輸、數據分析與處 理以及反向尋車等功能。該系統具備以下特點。
(1)成本低廉,便于普及應用。該系統所采用 的都是在具備基礎功能的前提下,價格較為低廉的 設備。其不需要實體的尋車客戶端,只需與微信小 程序結合即可實現尋車功能,從而節省了成本。
(2)使用方便、快捷。用戶使用該系統進行尋 車時,無須尋找實體客戶端,或者下載 APP,只需 用微信掃描反向尋車小程序二維碼,輸入車牌號和 附近停車位編號即可獲得車輛具體位置以及尋車路 線圖,并且不需要注冊賬號。該方式大大增加了用 戶使用的便捷程度以及使用意愿。
(3)定位精準,可靠度高。由于地下停車場網 絡信號較差,如果采用衛星來定位車主位置,會出 現定位不準確的情況。而該系統是通過手動輸入車 主位置來實現定位功能的,所以可以有效避免上述 問題。該系統信息間的傳遞采用系統自備的局域無 線通信網絡,可靠度高。
1.2 總體方案設計
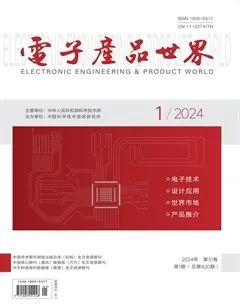
該尋車系統的構成主要包括:中心服務器(數 據庫)模塊、停車到位檢測和車輛信息采集模塊、 紫蜂協議(Zigbee)組網無線通信模塊和微信小 程序模塊。通過中心服務器連接整個系統中的各 模塊,以實現其各自的功能。系統整體架構如圖 1 所示。
2 系統各模塊的功能及其實現方案
2.1 中心服務器模塊
中心服務器是該系統的核心,其主要作用是協 調系統各模塊之間的運行。首先,將通過監控設備 和超聲波傳感器采集到的車輛信息傳輸到中心服務 器;其次,中心服務器對接收到的信息進行分析和 處理,得到車牌號和停車位編號等車輛信息,這些 信息會被暫時存放到數據庫中;最后,當用戶使用 該系統尋車時,這些信息可與先前被儲存在數據庫 中的停車場地圖信息進行結合,并被調出來供用戶 使用。
2.2 停車到位檢測和車輛信息采集模塊
停車到位檢測和車輛信息采集模塊是反向尋車 系統功能實現的前提。該模塊包含兩個部分:一是 利用安裝在車位上方的微處理器和超聲波傳感器對 車位上是否有車輛停放進行檢測;二是通過車位上 方的監控設備對車輛的圖像進行采集。兩個部分協同工作,當檢測到車位上已停放車輛后,監控設備 隨之開始采集停放車輛的圖像,然后將圖像信息, 如車牌號、車輛外觀等傳輸到中心服務器。整個過 程無須人工操作,方便用戶的使用。
2.3 Zigbee 組網無線通信模塊
Zigbee 組網無線通信模塊采用的是功耗低、 布線容易、距離短、抗干擾能力強的 Zigbee 技 術,該模塊主要包括功耗和使用成本較低的自組 網 Zigbee 無線通信設備和集中器。Zigbee 所采用 的芯片通過串口將采集到的相關數據傳送到主控 設備的芯片中,然后再通過 Zigbee 專用局域網將 停車信息和車輛數據傳輸到中心服務器以及微信 小程序客戶端。
2.4 微信小程序模塊
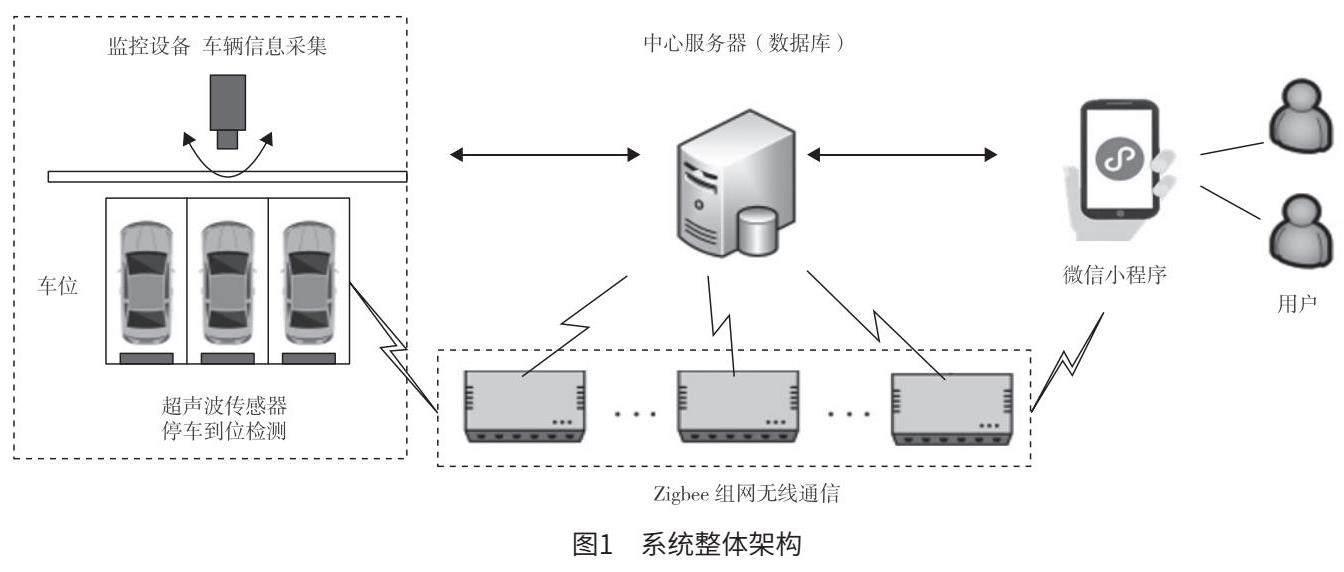
微信小程序是反向尋車系統設計技術路線得以 實現的載體。當用戶尋車時,首先,使用微信掃描 附近的尋車小程序二維碼,輸入附近的車位編號及 車牌號,小程序端將用戶輸入的信息傳輸至中心服 務器,中心服務器根據接收到的信息對用戶車輛所 在的具體位置進行查詢;其次,通過 A* 算法進行 最短尋車路徑的規劃;最后,將其顯示在尋車微信 小程序頁面上,用戶可以根據顯示的最短路徑進行 尋車。微信小程序尋車流程如圖 2 所示。
該程序能夠實現正常運行,其中有兩項關鍵 技術,具體分析如下。
2.4.1 系統路徑規劃算法
A* 算法是一種探測式搜尋算法,該算法通過探 測搜尋目標的最佳位置,規劃合理的尋車路徑,在 這個過程中影響運算結果精準性的關鍵因素是估價 函數的選擇是否合理 [6]。因此,估價函數是 A* 算 法的核心部分。
A* 算法中,估價函數的選擇會影響最優路徑獲 取的效率,其計算公式如下:
f(n)=g(n)+ h(n)。 (1)
式中,f(n)為估價函數;g(n)為既定代價,即 從開始節點到當前節點 n 時所付出的代價; h(n) 為估算代價,即從當前節點 n 至最終點需要付出代 價的估算值。
使用估價函數尋找最短路徑時,關鍵在于 h(n)的選取。假設節點 n 到目標節點的真實距 離為 d(n)。第 1 種情況,當 h(n)< d(n)時, 搜索范圍較大,點目數量也較多,因此會造成搜 索效率較低,但是最優解是可以被找到的;第 2 種情況,當 h(n)=d(n)時,系統會沿著最 短路徑的方向進行搜索,而且搜索的效率也是最 高的;第 3 種情況,當 h(n)> d(n)時,搜 索的范圍較小,點目數量也較少,所以可以進行 較高效的搜索,但是不能保證搜索到的路徑是最 短的。
與常見的迪克斯特拉(Dijkstra,Dij)[7-8] 路徑 規劃算法相比,A* 算法的時間復雜度與空間復雜度 較小。因此,A* 算法不僅可以大大降低搜索路徑時 的計算量,提高搜索效率和系統運行效率,而且當 用戶使用系統時還可以更快捷地獲取最優的尋車路 線圖。
2.4.2 停車場地圖建模
對停車場地圖建模的原因是:當用戶搜索車輛 時,反向尋車系統需要根據用戶輸入的相關信息查 找車輛在停車場的具體位置,然后結合 A* 算法得 到最短尋車路徑,并將其提供給用戶。對停車場的 地圖進行建模,需要將地圖數據提前導入中心服 務器,本文對停車場地圖模型的設計主要是通過 ArcGIS 平臺中的 ArcMap 軟件進行的。地理信息系統(geographic information system,GIS)是一種 特殊類型的空間信息系統,也是一種技術系統,可 以收集、存儲、管理、計算、分析和顯示某個地理 位置分布的數據。而 ArcGIS 是一種可以提供實現 GIS 功能的平臺。
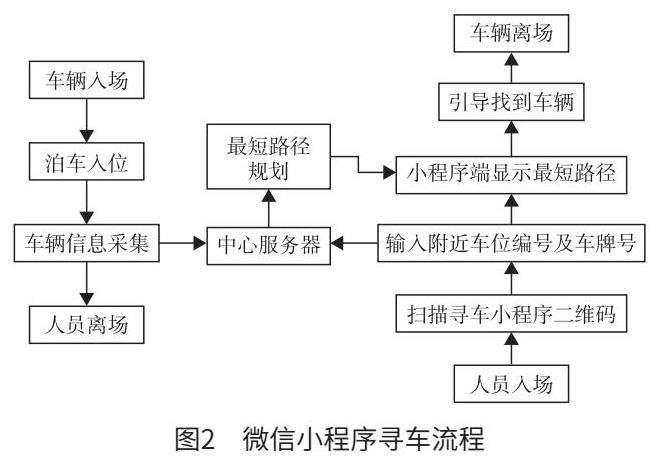
本文選擇某地一家大型的地下停車場作為研究 對象,對該停車場一層的所有停車位進行矢量地圖 的建模,停車場 ArcMap 地圖如圖 3 所示。
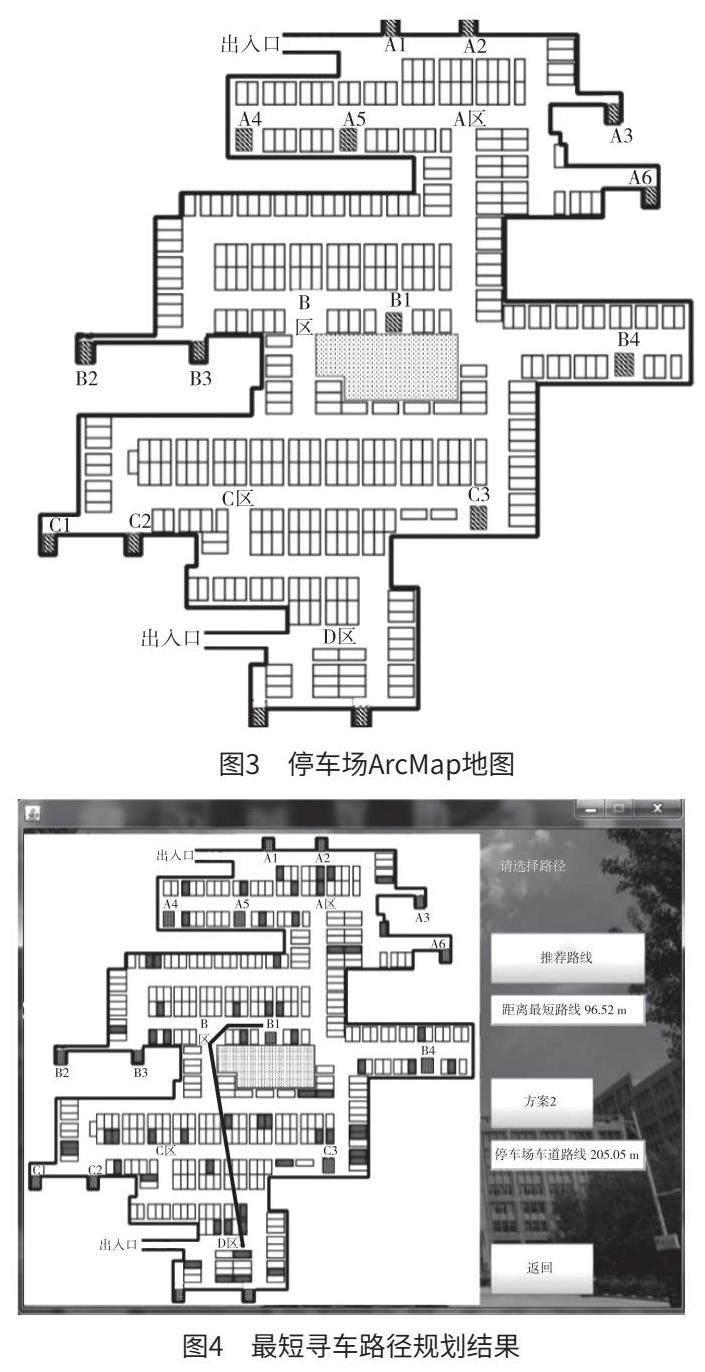
3 中,灰色斜線區域為通行口,灰色點狀區 域為障礙物。當用戶尋車時,首先,在微信小程序 端輸入車輛相關信息,如車牌號或車位所在編號, 小程序端將用戶輸入的信息傳輸給中心服務器,中 心服務器通過查詢目標車輛所在位置;其次,結合 A* 算法對具體的尋車路徑進行規劃;最后,在尋車 小程序端給出規劃好的尋車路線圖供用戶進行反向 尋車。在該示例中,使用 A* 算法運行后所得的最 短尋車路徑規劃結果如圖 4 所示。
3 結論
反向尋車系統是目前大型停車場智能化發展中 的一種新技術。雖然目前國內的停車場在一定程度 上已經實現了智能化管理,一些尋車技術也應用到 了實際生活中,但是由于建設運營成本較高、使用 較復雜等原因,并未得到大范圍的應用與普及。本 文設計了一種基于微信小程序、輕量化、便捷化的 反向尋車系統,用戶尋車時只需要用微信掃描尋車 小程序二維碼,輸入車輛信息和位置信息,然后系 統通過局域網將信息傳輸到中心服務器,經過 A* 算法生成一條靜態的最短尋車路徑,以實現尋車目 的。該系統操作方便、成本低,便于在大型停車場 中推廣使用。
參考文獻
[1] 公安部辦公廳統計處 . 2022 年全國機動車和駕駛人 統計分析 [J]. 公安研究,2023(2):95-96.
[2] CARRERA V J L,ZHAO Z L,BRAUN T,et al. A real-time robust indoor tracking system in smartphones[J]. Computer communications, 2018,117:104-115.
[3] 趙原真 . 大型地下停車場反向尋車系統設計及路徑規 劃算法研究 [D]. 哈爾濱:哈爾濱理工大學,2022.
[4] 李華蓉,潘國兵,趙一,等 . 基于 Android 平臺的 室內停車場智能尋車系統研究 [J]. 重慶交通大學學 報( 自 然 科 學 版 ),2016,35(4):112-115, 126.
[5] 蔣方艷,顏路夢,張笑語,等 . 基于 AR 技術的大型 地下停車場反向尋車系統設計 [J]. 鹽城工學院學報 (自然科學版),2018,31(1):64-69.
[6] MOSCIBRODZKA M,DAS T K,CZERNY B. The pattern of accretion flow onto Sgr A*[J]. Monthly notices of the Royal Astronomical Society,2006,370(1):219-228.
[7] 王輝,朱龍彪,王景良,等 . 基于 Dijkstra:蟻群 算法的泊車系統路徑規劃研究 [J]. 工程設計學報, 2016,23(5):489-496.
[8] WUY F,LI X.Numerical simulation of the propagation of hydraulic and natural fracture using Dijkstras algorithm[J]. Energies,2016,9(7):519-533.