營運車輛操縱穩定性主客觀綜合評價研究
2024-05-12 00:00:00周俊朱佳張思聰彭舶航
專用汽車 2024年4期








摘要:經濟和汽車產業的迅猛發展促進了道路運輸業。從營運車輛操縱穩定性的主客觀評價相互配合的角度出發進行綜合評價,首先建立操縱穩定性的主客觀綜合評價體系,運用層次分析法確定主客觀評價指標的權重系數,其次選擇對三輛營運車輛進行實際試驗,收集影響操縱穩定性的數據,最后運用模糊綜合評價法對試驗車輛的操縱穩定性的各評價指標進行測算和評價,得出綜合評價結果,為營運車輛的操縱穩定性評價提供指導。
關鍵詞:操縱穩定性;主客觀評價;層次分析法;模糊綜合評價
中圖分類號:U461 收稿日期:2024-02-10
DOI:10.19999/j.cnki.1004-0226.2024.04.027
1 前言
營運車輛包括貨車、客車、公交車、網約車和出租車等,是以盈利為目的的道路運輸機動車。這種車型使人們出行更加便利,也符合低碳環保的出行選擇。
汽車的操縱穩定性是安全使用的重要評價指標之一,指車輛在正常行駛時,面對外界干擾能夠保持穩定。操縱穩定性包括操縱性和穩定性兩方面,前者是指車輛對駕駛員指令的響應能力,后者是指車輛在面對干擾時恢復至穩定狀態的能力[1]。
2 理論基礎
2.1 操縱穩定性指標的確定
我國操縱穩定性能試驗方法和標準主要包括:根據JT/T 884—2014要求的穩態回轉試驗傳感器所測得側向加速度、側傾角、橫向載荷轉移率這些常見的側翻穩定性的評價指標,依據GB/T 6323—2014設定的蛇形試驗比較分析其最大橫向位移、側傾角、側向加速度,評價標準依據GB/T 6323—2014《汽車操縱穩定性試驗方法》的穩態回轉試驗評價標準,按中性轉向點的側向加速度值an、不足轉向度U、車箱側傾度K?三項指標進行評價計分[2],最后對操縱穩定性能各試驗的評價指標和影響因素進行總結。
2.2 主客觀綜合評價方法
汽車操縱穩定性的評定一般分為主觀評價和客觀評價兩種方法:主觀評價法是靠實驗評價者根據實驗時的實際結果并結合自身豐富的經驗進行評價;客觀評價法是通過測試儀器測量出被驗體的表征性能的物理量。
2.3 層次分析法
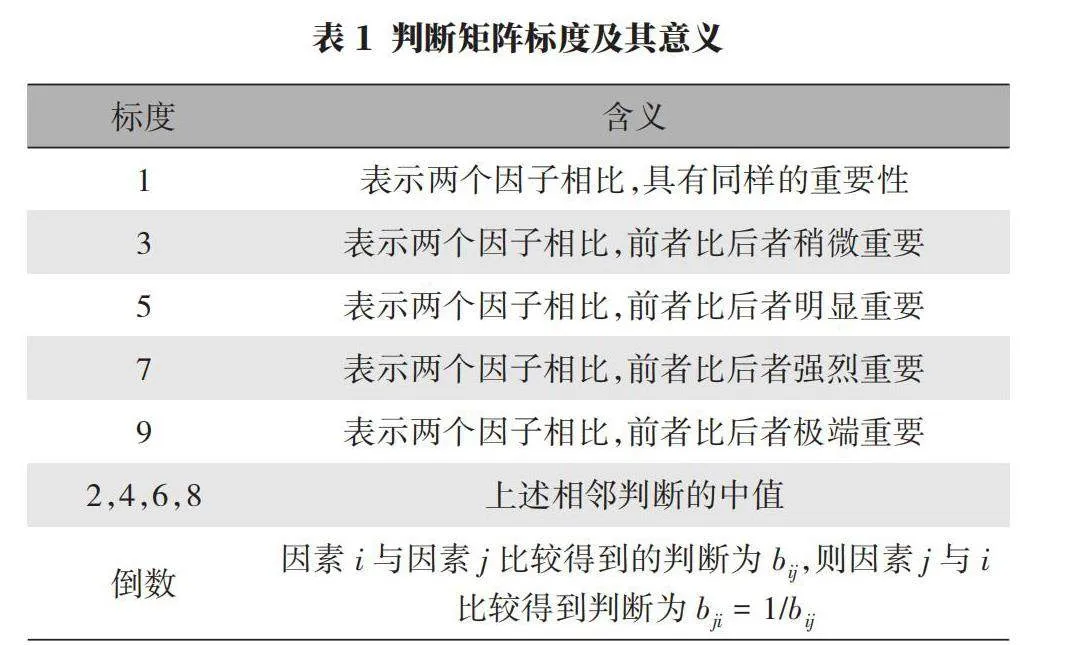
層次分析法(AHP)是一種系統分析方法, 可有效地幫助科研人員更好地理解和處理復雜的決策問題。通過構建分層模型,可以更輕松地做出復雜的決策。通過層次分析法把目標解決研究的問題分解為不同的指標層,再根據總目標的需求構建一個多層有序遞階的層次結構圖,使各個相互之間關聯影響的指標以及隸屬關系按照不同的階層鋪陳。為構建判斷矩陣采用兩兩比較法,其中引入了1~9比率標度法,如表1所示[3]。然后根據評價結果,將各個層次的因子按照它們在整體評價結果的優劣進行排序。
在判斷矩陣的估計中,不可避免地存在不一致性問題。為此,層次分析法引入了一致性指標CI,以判斷矩陣最大特征值λmax與判斷矩陣的階數差別來衡量不一致程度。平均隨機一致性指標RI與矩陣階數n的關系見表2。
表2顯示,當n<3時,判斷矩陣永遠具有一致性。判斷矩陣的一致性指標CI與同階平均隨機一致性指標RI之比稱為隨機一致性比率,記作CR,即:
規定當CR<0.1時,認為判斷矩陣具有令人滿意的一致性;否則,就需要調整判斷矩陣,使其滿足CR<0.1。
a.分析系統中各因素之間的關系,建立層次結構模型。
b.通過專家咨詢按照表1構造出各因素兩兩相互比較的判斷矩陣。對于復雜問題,可以咨詢多個專家。
c.計算單一因素下各指標的相對權重,并進行一致性檢驗。計算公式為:
式中,aij為矩陣中第i行第j列對應的值;[aij′]為矩陣中第i行第j列對應值的歸一化結果。
按行將列歸后的元素相加計算:
得到的列元素按歸一化后計算得到權重:
矩陣A的最大特征根計算:
一致性指標計算:
從表1中查找隨機一致性指標RI,計算相對一致性指標:
對于多人決策時,采用先分別計算單個指標權重,在都符合一致性要求的前提下,取各對應指標的算術平均即為此指標的最終權重。這是多人決策時最常用的方法。
d.組合權向量的計算。
由各準則對目標的權向量和各方案對每一準則的權向量計算各方案對目標的權向量,該向量就叫組合權向量。具體方法參考相關文獻。
3 操縱穩定性主客觀綜合評價體系構建
3.1 主客觀評價指標選取
主客觀評價指標確定將典型行駛工況性能(如蛇形試驗、穩態回轉試驗、抗側翻穩定性試驗)的物理指標與直線、轉彎和應急三種工況下的主觀指標進行匹配,主客觀綜合評價指標的確定見表3。
3.2 主客觀評價體系構建
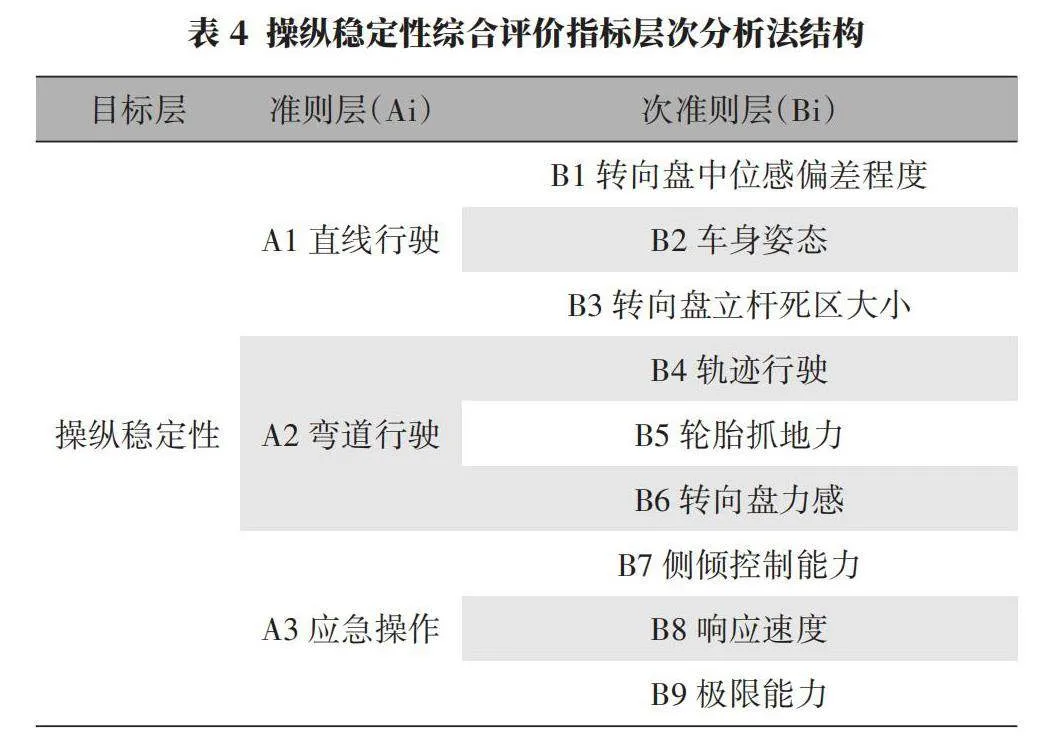
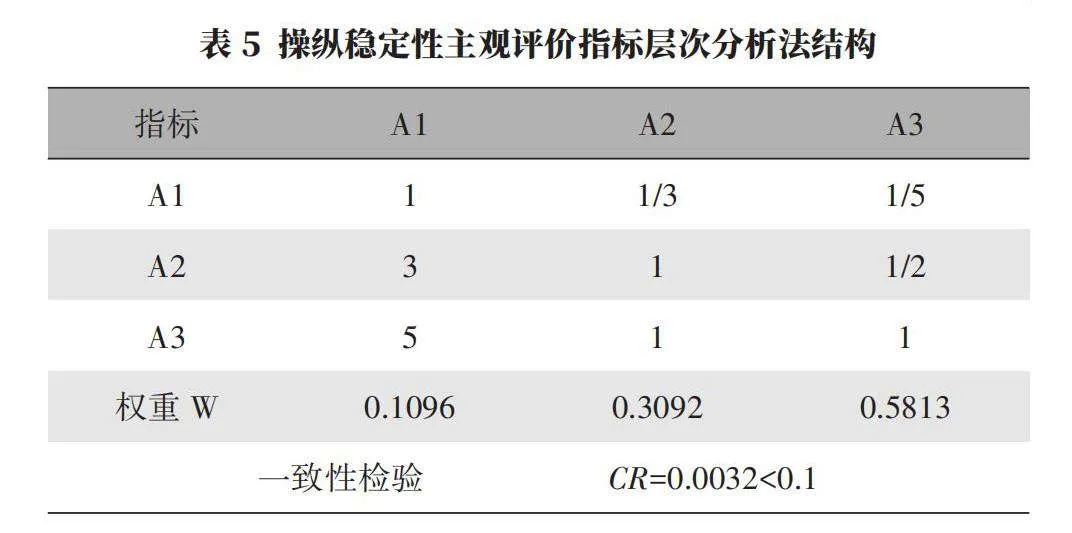
本文選取國外成熟的評價體系,建立主觀評價為主的操縱穩定性綜合評價體系,包括評價指標項目、駕駛員操作方法、打分依據和打分方法。再結合有經驗的駕駛員對三款營運車輛進行試驗評價,再通過模糊綜合評價法算出得分。相關內容如表4、表5所示。
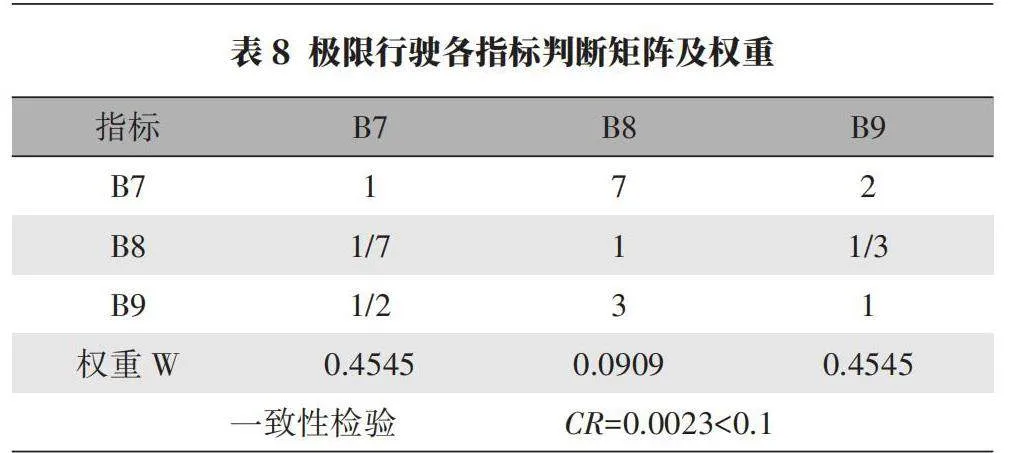
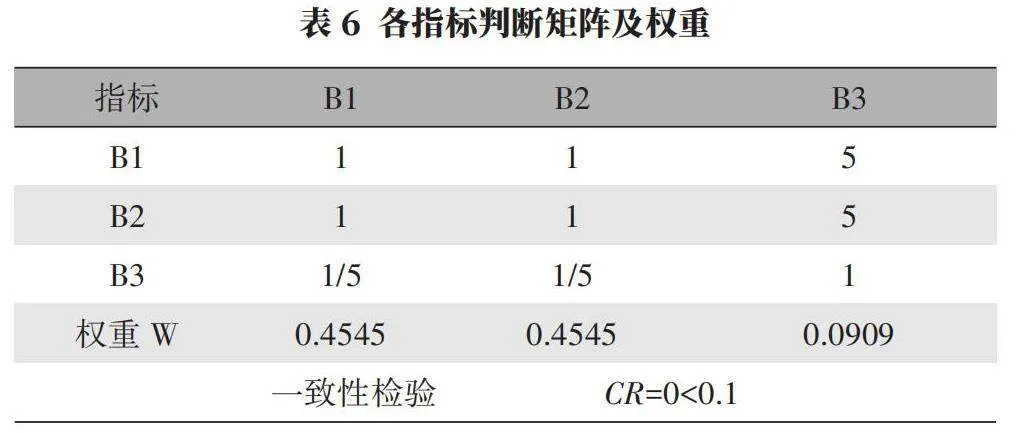
3.3 基于AHP技術的評價指標權重計算
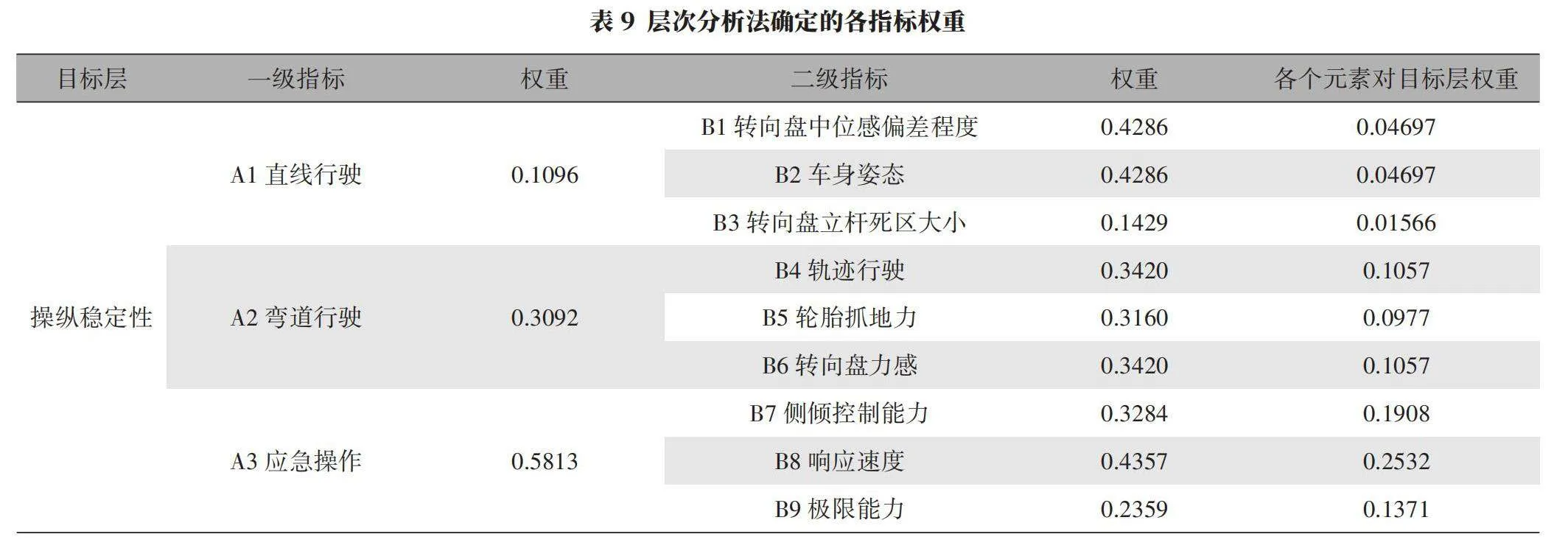
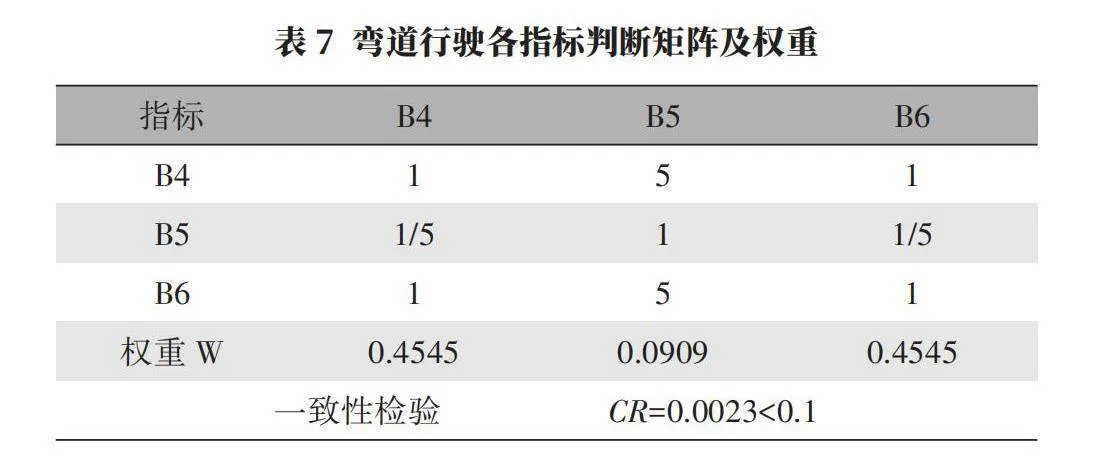
為了對上述選取的案例營運車輛的操縱穩定性進行準確的評價,得出一個較為可靠的結果。同理計算其他專家單一因素下各指標的相對權重,并進行一致性檢驗;然后對同一指標下的其他專家取算術平均作為單個指標的權重;其他指標按相似方法確定。最后所確定的計算權重如表6~表9所示。
次準則層中各個因素對目標層的權值[A]為:
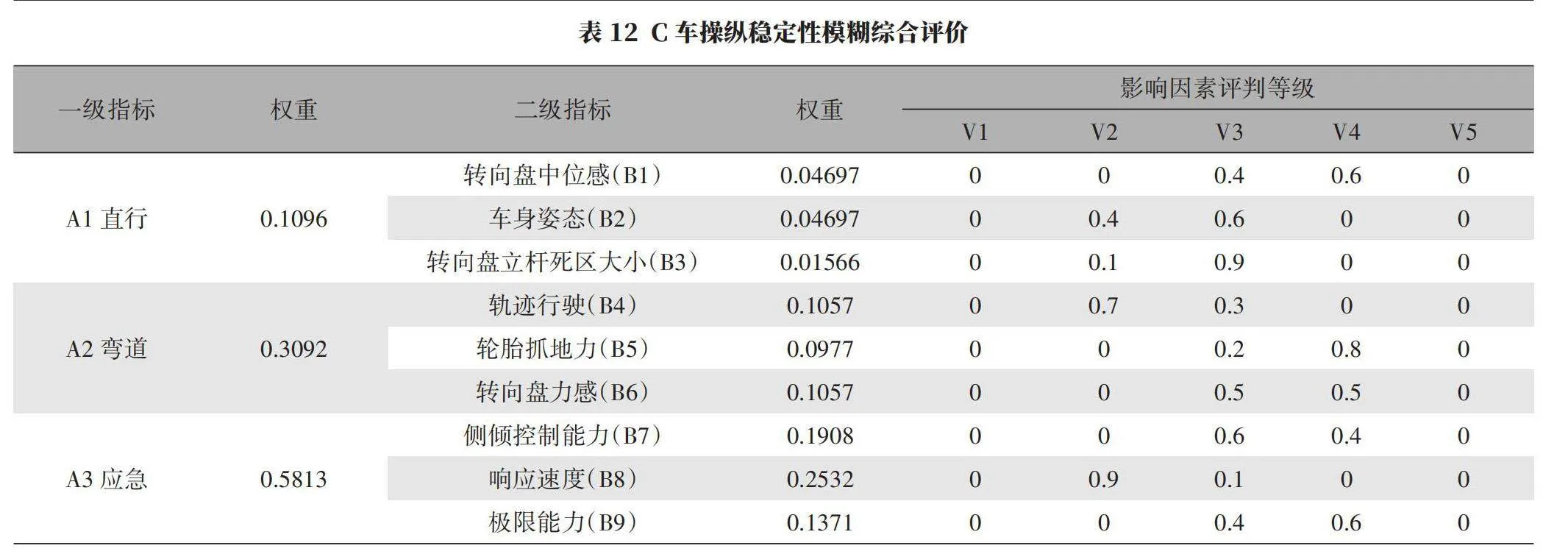
[A=(0.04697,0.04697,0.01566,0.1057 0.0977,0.1057,0.1908,0.2532,0.1371)]
4 營運車輛操縱穩定性主客觀綜合評價
4.1 選取評價車輛A、B、C三輛營運車輛
選取了上汽大通MAXUS、飛碟Q3以及飛碟W5三輛營運車輛進行驗,試驗車輛如圖1所示。A車(2018年版)L4發動機,2.5 L排量,發動機最大功率136馬力;B車(2020年版)1.6 L排量,發動機最大功率122馬力;C車(2021年版)2.8 L排量,發動機最大功率156馬力。試驗組包括2名經驗豐富的試驗司機和5名專業的檢驗工程師,試驗組成員共同對這三輛試驗車進行操縱穩定性試驗與評價以及操縱穩定性指標綜合評價。
4.2 評價集的建立
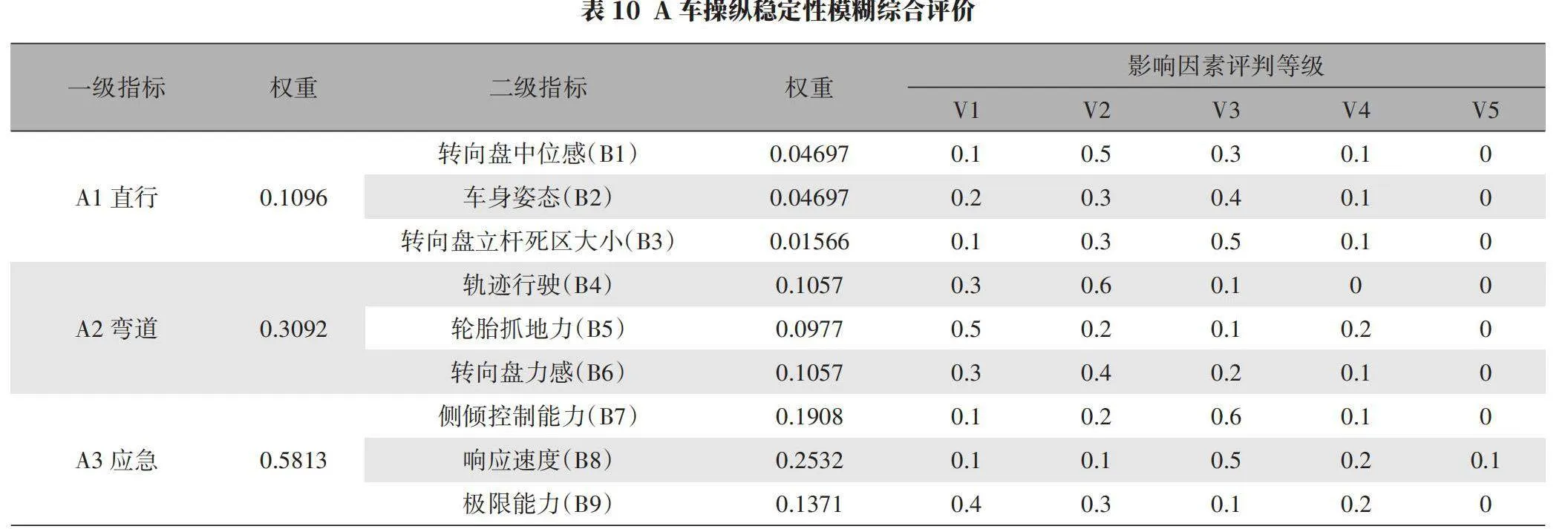
本文建立評語集[V=v1,v2,…,v5]={“很好”,“比較好”,“一般”,“較差”,“很差”}。汽車操縱穩定性的模糊綜合評價計算公式為:[B=A?R]。
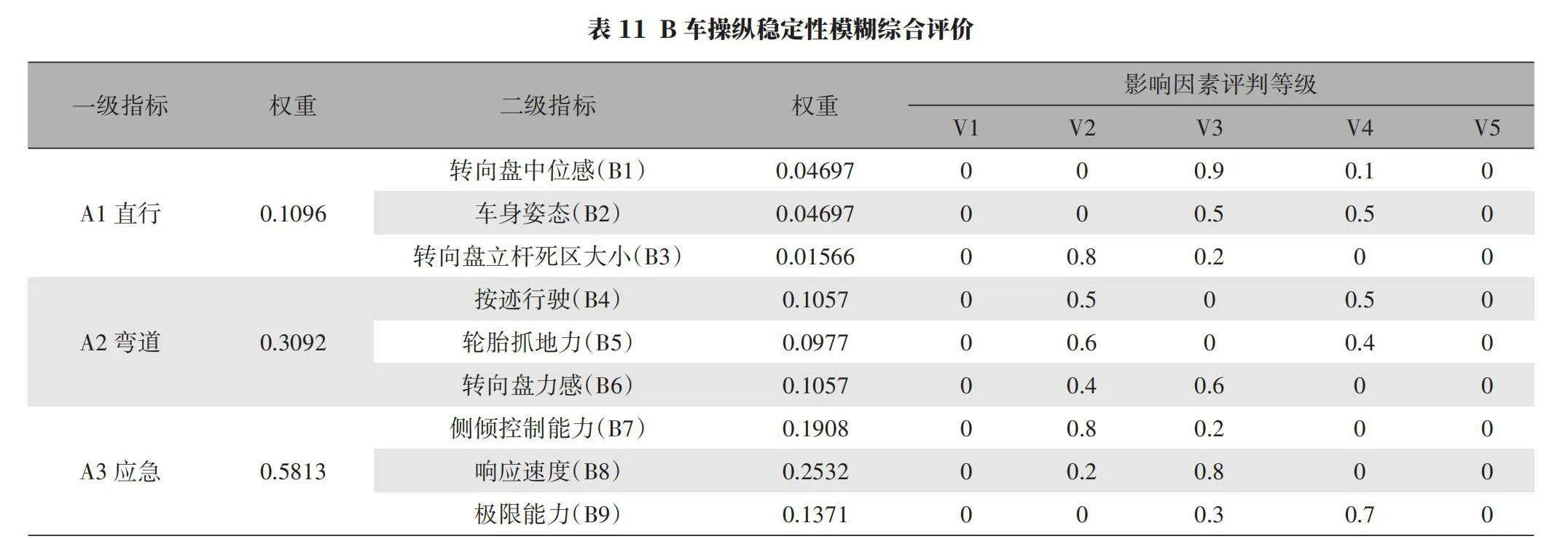
4.3 評價結果
如表10~表12所示,由上文評價指標權重向量A,通過構建出9×5的權重判斷矩陣R。對此采用最大隸屬法和賦值法對車輛操縱穩定性綜合評價結果進一步分析。
4.4 最大隸屬法
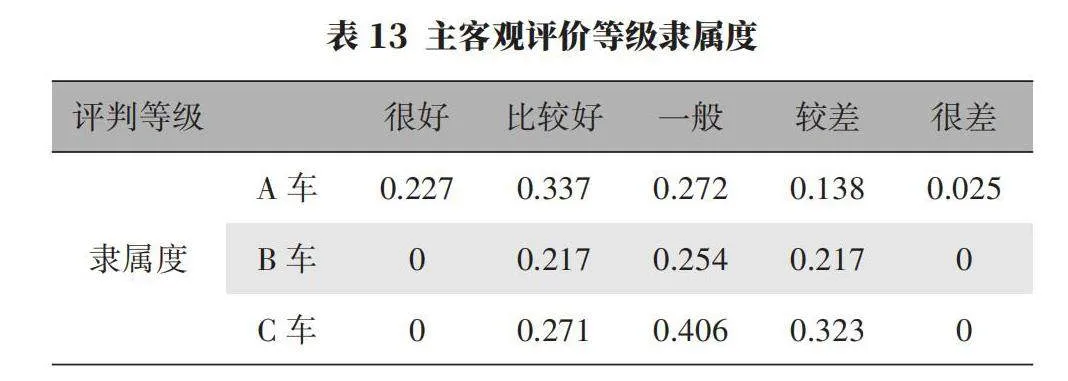
隸屬度是在0~1之間的一個數,用來表示評價對象(A,B,C)對評語集(很好,比較好,一般,較差,很差)的歸屬程度,根據最大隸屬度法集合最大隸屬度法則,A、B、C三輛車評語集中權重最高的即為綜合評價結果[4]。
如表13所示,對營運車輛操縱穩定性模型綜合評價結果進行歸一化處理,建立隸屬度表,進行分析得到5個評語集隸屬度。由數據可知,最終綜合評價的結果依次為“比較好”“一般”“一般”。車型A:B=(0.2271,0.3369,0.2721,0.1382,0.02532),這一結果表明,22.71%認為該車的操縱穩定性“很好”,33.69%認為“比較好”,27.21%認為“一般”,13.82%認為“較差”,2.532%的專家認為“很差”。以下同理。車型B:B=(0,0.3695,0.4141,0.216,0)表明,41.41%的專家認為“一般”;車型C:B=(0,0.3222,0.5356,0.3177,0)表明,53.56%認為“一般”。
4.5 加權平均法
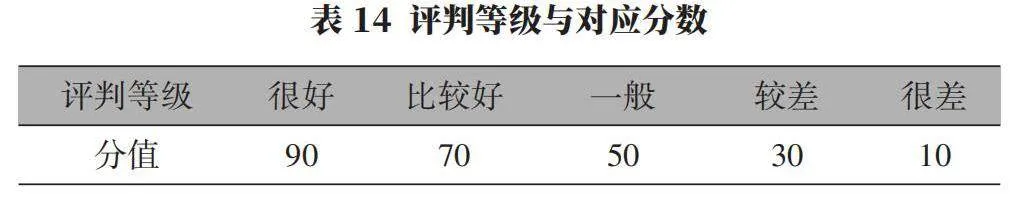
在廣泛調查和參考相關的文獻的基礎上,選址評價等級一般量化為100分制,令[V=10,30,50,70,90],具體見表14。
針對四個評語的評判等級(很好,比較好,一般,較差,很差),分別賦分為90,70,50,30,10分[5];可計算得出綜合得分值。
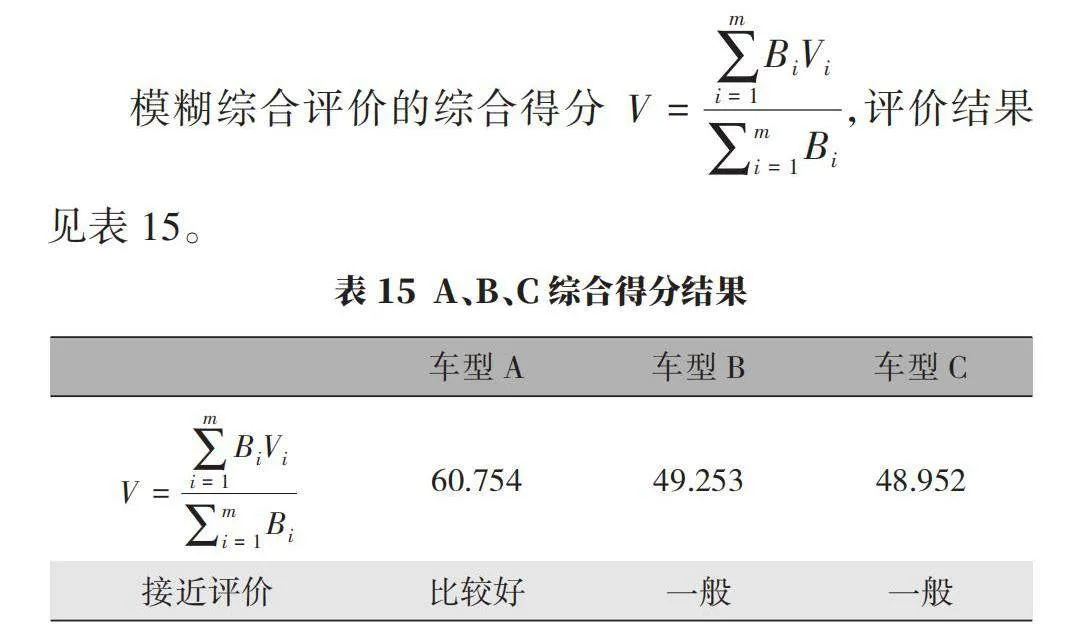
模糊綜合評價的綜合得分[ V=i=1mBiVii=1mBi],評價結果見表15。
由加權平均法可知:車型A的營運車輛操47b514b6b76e75f21e9dc978b9d82cc2b4c97c9b089aab7b0e84fc9aea026b52縱穩定性綜合評價介于“一般”和“比較好”之間,且接近于“比較好”;車型B、C的綜合評價介于“一般”和“比較好”之間,且接近于“一般”。
5 結語
本文基于GB/T 6323—2014《汽車操縱穩定性試驗方法》和QC/T 480《汽車操縱穩定性指標限值與評價方法》,構建了營運車輛操縱穩定性主客觀評價體系,通過層次分析法得到確定指標權重。其次結合A、B、C三款營運車輛進行實際試驗,通過邀請專業且經驗豐富的駕駛員進行試驗及主觀評價,對三輛營運車輛操縱穩定性的主客觀綜合評價指標進行了評判,驗證評價指標體系的有效性。采用最大隸屬法和加權平均法對結果進行進一步分析,得出三輛營運車輛操縱穩定性的綜合評價結果。未來的研究可以進一步探索不同駕駛環境下的汽車操縱穩定性,并結合智能駕駛技術,深入研究其對操縱穩定性的影響,以提高駕駛安全性和車輛性能。
參考文獻:
[1]羅磊.汽車操縱穩定性的研究與評價[J].南方農機,2019,50(6):209.
[2]雷穎絜,劉偉,王飛,等.商用車操縱穩定性主客觀評價結果研究[J].湖北汽車工業學院學報,2017,31(1):55-58+68.
[3]唐帥.汽車操縱穩定性客觀評價指標挖掘及主客觀評價一致性研究[D].長春:吉林大學,2016
[4]陳升鵬,胡立好.汽車操縱穩定性綜合評價方法[J].湖北汽車工業學院學報,2021,35(2):38-42.
[5]Aouadj N,Hartani K,Fatiha M.New Integrated Vehicle Dynamics Control System Based on the Coordination of Active Front Steering,Direct Yaw Control,and Electric Differential for Improvements in Vehicle Handling and Stability[J].SAE International Journal of Vehicle Dynamics,Stability,and NVH,2020,4(2):119-133.
作者簡介:
周俊,男,1990年生,工程師,研究方向為車輛法規及認證。
張思聰(通訊作者),男,1989年生,助理工程師,研究方向為車輛法規及認證。