人體腰部輔助外骨骼及控制方法的設(shè)計(jì)
2024-05-21 12:04:54谷宏治王添鑫閆澤峰徐東亮
機(jī)械制造 2024年4期
□ 谷宏治 □ 王添鑫 □ 閆澤峰 □ 徐東亮 □ 雍 旭
1.西安向陽(yáng)航天材料股份有限公司 西安 710075
2.武漢理工大學(xué) 機(jī)電工程學(xué)院 武漢 430070
3.華中科技大學(xué) 機(jī)械科學(xué)與工程學(xué)院 武漢 430074
4.中國(guó)科學(xué)院深圳先進(jìn)技術(shù)研究院 廣東深圳 518055
1 設(shè)計(jì)背景
盡管現(xiàn)代工廠普遍使用機(jī)器人和與工作相關(guān)的自動(dòng)化設(shè)備來(lái)搬運(yùn)沉重的、超出人類能力的貨物,但是仍然有許多任務(wù)需要手工操作,尤其是在物流業(yè)、制造業(yè)和醫(yī)療行業(yè)。根據(jù)國(guó)家統(tǒng)計(jì)局的調(diào)查研究,從事物流工作的員工背痛的比例為84%,從事建筑工作的員工腰椎受壓的比例為75%,從事醫(yī)療工作的員工背痛的比例為67%,此外,有31%~45%從事重體力勞動(dòng)的勞動(dòng)者因?yàn)榧∪夂图‰鞊p傷而退休[1]。由工作產(chǎn)生的員工個(gè)體腰椎損傷和職業(yè)病經(jīng)濟(jì)補(bǔ)償,會(huì)影響職工的生活質(zhì)量,增加企業(yè)的經(jīng)濟(jì)成本,是一個(gè)重大的社會(huì)問(wèn)題[2]。隨著腰肌勞損患者的增加,迫切需要開(kāi)發(fā)一種輕便的腰肌輔助外骨骼,為從事繁重或重復(fù)性負(fù)重工作的勞動(dòng)者提供幫助。
如今,許多學(xué)者和研究機(jī)構(gòu)都在開(kāi)發(fā)動(dòng)力輔助裝置,以保護(hù)在制造、建筑、肉品包裝、護(hù)理方面經(jīng)常進(jìn)行手動(dòng)操作和負(fù)重任務(wù)的勞動(dòng)者。研究者根據(jù)需求設(shè)計(jì)出各種下背部輔助外骨骼,在軀干和大腿之間提供幫助,以減輕腰椎負(fù)荷。各種被動(dòng)外骨骼系統(tǒng)被提出,這些系統(tǒng)使用彈性帶提供機(jī)械輔助,來(lái)搬運(yùn)物體[3-7]。
針對(duì)需求,筆者設(shè)計(jì)了一種輕巧、可穿戴的動(dòng)力型人體腰部輔助外骨骼機(jī)械結(jié)構(gòu),并對(duì)外骨骼的關(guān)鍵部位進(jìn)行有限元分析。同時(shí)簡(jiǎn)化人體舉重過(guò)程為坐標(biāo)連桿模型,建立系統(tǒng)動(dòng)力學(xué)模型,進(jìn)而提出一種基于自適應(yīng)算法的人體腰部輔助外骨骼控制方法。通過(guò)構(gòu)建試驗(yàn),測(cè)量得到腰豎脊肌、胸豎脊肌、背闊肌的肌電信號(hào),借助MATLAB工具對(duì)所提出的控制方法進(jìn)行軌跡規(guī)劃試驗(yàn)仿真,與實(shí)際搬運(yùn)者軌跡進(jìn)行對(duì)比,分析人機(jī)相容性。筆者所做研究有助于勞動(dòng)者搬運(yùn)工作時(shí)減小腰椎壓力,降低背部發(fā)生與工作相關(guān)的肌肉骨骼疾病的風(fēng)險(xiǎn)[8]。
2 人體腰部輔助外骨骼設(shè)計(jì)
人體腰部輔助外骨骼是一種輔助勞動(dòng)者搬動(dòng)重物的裝置,目的在于減小腰部用力,達(dá)到減少腰部損傷的效果。為了滿足人體穿戴方便的要求,同時(shí)符合人體形態(tài),保證在穿戴外骨骼時(shí)不會(huì)妨礙人體的正常運(yùn)動(dòng),對(duì)人體腰部輔助外骨骼的腰部、髖關(guān)節(jié)、大腿進(jìn)行了設(shè)計(jì),結(jié)構(gòu)如圖1所示。
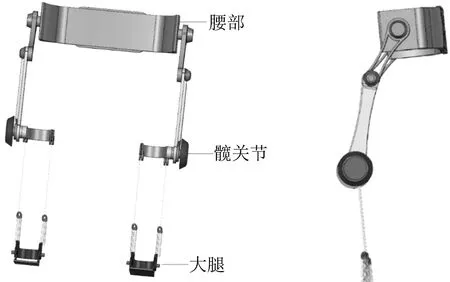
圖1 人體腰部輔助外骨骼結(jié)構(gòu)
腰部設(shè)計(jì)為凹體形狀,使勞動(dòng)者彎腰時(shí)與弧形的設(shè)計(jì)面貼合更加緊密,采取中間凹形、兩邊有支撐板的形式,限制左右自由度。將電機(jī)驅(qū)動(dòng)器、電池系統(tǒng)等模塊安裝于髖關(guān)節(jié)。在勞動(dòng)者搬運(yùn)重物的過(guò)程中,除了需要承受物體的重力,還要承受外骨骼的重力,這對(duì)長(zhǎng)時(shí)間穿戴外骨骼的勞動(dòng)者而言是一個(gè)負(fù)擔(dān)。對(duì)此,將人體腰部輔助外骨骼的質(zhì)量定為6 kg。通常勞動(dòng)者在搬運(yùn)重物時(shí),髖關(guān)節(jié)上的扭矩為70 N·m。為了在勞動(dòng)者搬運(yùn)重物時(shí)有明顯的輔助性效果,在兩個(gè)髖關(guān)節(jié)上的持續(xù)扭矩設(shè)定為70 N·m,這樣可以加強(qiáng)髖關(guān)節(jié)的伸屈。勞動(dòng)者直立時(shí),髖關(guān)節(jié)處的運(yùn)動(dòng)角度設(shè)定為向前120°,向后30°,可以滿足勞動(dòng)者正常步行和搬運(yùn)重物的要求。髖關(guān)節(jié)設(shè)置上下伸縮功能,配合腰部的調(diào)節(jié)機(jī)制,可以滿足不同勞動(dòng)者的穿戴需求。
3 有限元分析
人體腰部輔助外骨骼在輔助勞動(dòng)者搬運(yùn)重物時(shí),工作時(shí)間較長(zhǎng),加之大腿連接桿和腰部支撐板與電機(jī)直接連接,末端在電機(jī)工作的情況下會(huì)發(fā)生較大彎曲變形存在風(fēng)險(xiǎn)。為了確保長(zhǎng)時(shí)間工作安全,需要對(duì)腰部、髖關(guān)節(jié)進(jìn)行力學(xué)分析。設(shè)定大腿連接處一端受到的扭矩為70 N·m,將大腿另一端連接桿固定住,利用有限元軟件對(duì)腰部和髖關(guān)節(jié)結(jié)構(gòu)進(jìn)行有限元分析,結(jié)果分別如圖2、圖3所示。
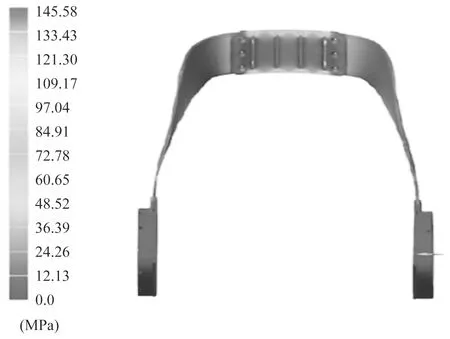
圖2 腰部有限元分析結(jié)果
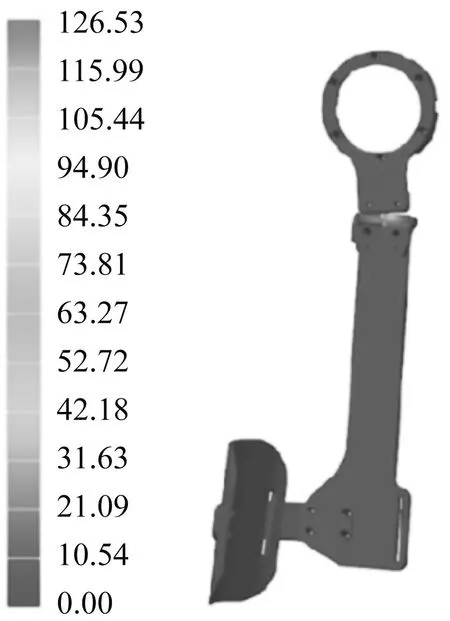
圖3 髖關(guān)節(jié)有限元分析結(jié)果
由有限元分析結(jié)果可以看到,腰部的最大應(yīng)力為145.58 MPa,髖關(guān)節(jié)的最大應(yīng)力為126.53 MPa。此外,大腿的最大應(yīng)力為139.58 MPa。
4 動(dòng)態(tài)模型分析
針對(duì)穿戴人體腰部輔助外骨骼的勞動(dòng)者進(jìn)行搬運(yùn)重物的運(yùn)動(dòng)過(guò)程,建立人體腰部輔助外骨骼動(dòng)力學(xué)模型,以進(jìn)一步精準(zhǔn)控制外骨骼運(yùn)動(dòng)。采用歐拉拉格朗日方程建立人體腰部輔助外骨骼穿戴動(dòng)力學(xué)模型,如圖4所示。l1為腰部長(zhǎng)度,m1為腰部質(zhì)量,θ1為腰椎相對(duì)水平x軸逆時(shí)針轉(zhuǎn)動(dòng)的角度,l2為軀干長(zhǎng)度,m2為脖頸以下的質(zhì)量,θ2為手臂相對(duì)腰椎轉(zhuǎn)動(dòng)的角度,r3為手和手臂長(zhǎng)度,m3為手和手臂質(zhì)量,l3為前臂長(zhǎng)度,m4為重物質(zhì)量,l5為大腿長(zhǎng)度,m5為大腿質(zhì)量,l6為小腿長(zhǎng)度,m6為小腿質(zhì)量,l7為腳長(zhǎng)度,m7為腳質(zhì)量。
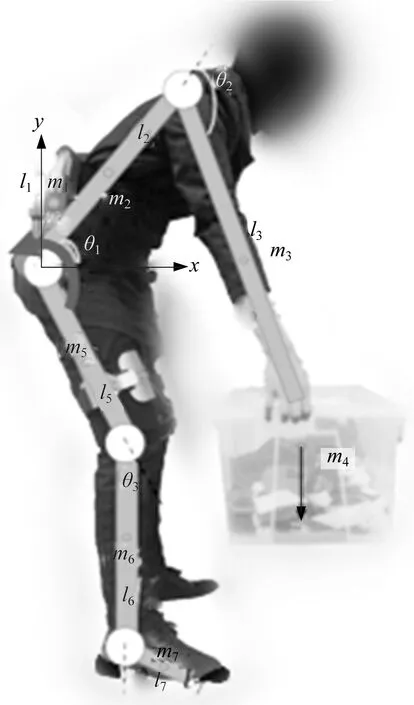
圖4 人體腰部輔助外骨骼穿戴動(dòng)力學(xué)模型
(1)

(2)
簡(jiǎn)化的人體腰部輔助外骨骼的質(zhì)心位置矢量、質(zhì)心速度矢量、質(zhì)心角速度矢量分別為:
(5)
式中:r1為原點(diǎn)到腰部質(zhì)心的距離。
(8)
式中:r2為原點(diǎn)到脖頸以下質(zhì)心的距離。
(11)
式中:r3為原點(diǎn)到手和手臂質(zhì)心的距離。
(14)
構(gòu)件的質(zhì)心速度為vi,圍繞質(zhì)心的慣性矩為Ji,原點(diǎn)所在平面為重力勢(shì)能零勢(shì)能面。若不考慮部件與運(yùn)動(dòng)副之間的彈性,則整個(gè)機(jī)構(gòu)的總動(dòng)能E和勢(shì)能V分別為:
(15)
V=∑(migi0Py)
(16)
可以得到:
(17)
另外有:
(18)
進(jìn)而得到:

(19)
在搬運(yùn)重物的過(guò)程中,物體總是豎直向下的,其幾何形狀為:
θ2= π/2 +θ1
(20)
式(20)代入式(19),得:
(21)
5 控制方法
勞動(dòng)者搬運(yùn)重物的過(guò)程實(shí)質(zhì)為從俯身狀態(tài)雙手托著重物提升到背部直立的過(guò)程[11]。因?yàn)槊看伟釀?dòng)的重物質(zhì)量不同,勞動(dòng)者的高度也不一樣,所以需要根據(jù)角度來(lái)決定初始位置和最終位置。由傳感器獲得初始角度,終點(diǎn)的位置為直立狀態(tài),角度固定。人體腰部輔助外骨骼的運(yùn)動(dòng)軌跡從初始狀態(tài)到最終狀態(tài)必須是平滑的,并且為了在彎腰和直立時(shí)保持平穩(wěn)狀態(tài),人體腰部輔助外骨骼在開(kāi)始和結(jié)束動(dòng)作時(shí)加速度與速度都必須為0。運(yùn)動(dòng)軌跡是一個(gè)五次多項(xiàng)式函數(shù),具有特定運(yùn)動(dòng)規(guī)則,為:
θ(t)=a1t5+b1t4+c1t3+d1t2+e1t+f1
(22)
式中:a1、b1、c1、d1、e1為因數(shù);t為時(shí)間。
不考慮摩擦等干擾,根據(jù)上述動(dòng)力學(xué)方程,可以得到人體腰部輔助外骨骼的動(dòng)力學(xué)方程,為:
(23)
將m的期望值設(shè)為me,即機(jī)器人的期望軌跡。
在人體腰部輔助外骨骼的輔助過(guò)程中,自適應(yīng)控制器在每個(gè)關(guān)節(jié)處提供一個(gè)n×1的輔助力矩或力M。M可以通過(guò)基于模型的自適應(yīng)控制算法來(lái)確定[12],定義為:
LDm
(24)
式中:LS、LD為時(shí)變正定矩陣。
限制為滑動(dòng)面,有:
(25)
可以消除不必要的穩(wěn)態(tài)位置誤差分?jǐn)?shù)。λ為常數(shù)矩陣,特征值位于右半復(fù)平面上,并且有:
λ=LSLD-1
(26)
引入新的量mx,作為虛擬參考軌跡,有:
(27)
(28)
由此,控制策略可以改寫(xiě)為:
(29)

(30)
于是有:
(31)
G為n×n階正定增益矩陣,根據(jù)總體誤差確定控制器的自適應(yīng)速率。利用高斯徑向基函數(shù),確定適應(yīng)不同勞動(dòng)者的回歸矩陣Y。通過(guò)式(32)選取Y,δ成為決定機(jī)器人驅(qū)動(dòng)力矩或力M的前饋?lái)?xiàng)。
(32)
(33)
根據(jù)控制策略,繪制控件框圖,如圖5所示。
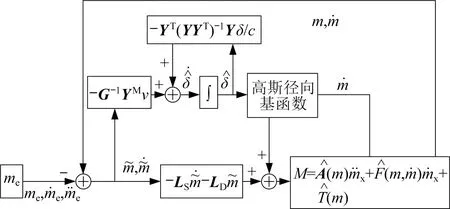
圖5 控件框圖
6 運(yùn)動(dòng)軌跡規(guī)劃
根據(jù)上述計(jì)算得到控制策略,通過(guò)編譯程序?qū)崿F(xiàn)對(duì)人體腰部輔助外骨骼的軌跡規(guī)劃。首先確定人體腰部輔助外骨骼的行動(dòng)參數(shù),并且參照人體特征各個(gè)部位的50%分位數(shù)進(jìn)行仿真。行動(dòng)參數(shù)仿真值見(jiàn)表1。
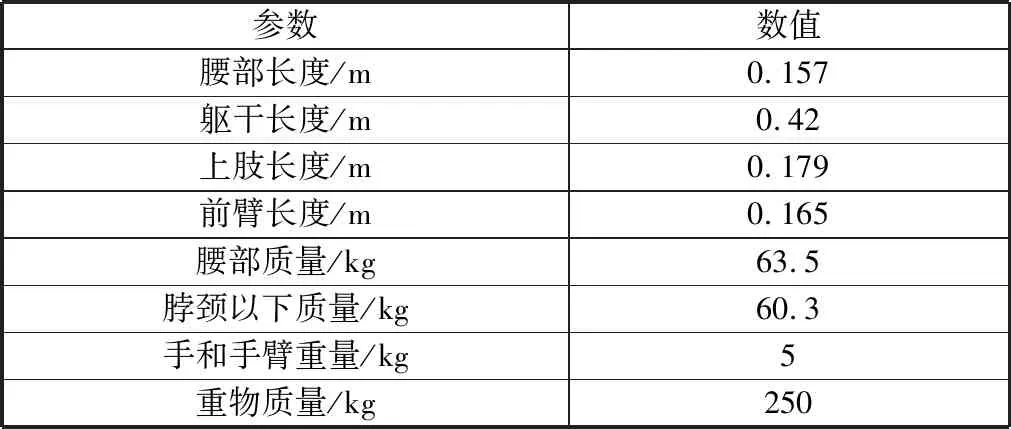
表1 行動(dòng)參數(shù)仿真值
結(jié)合上述控制策略,通過(guò)MATLAB軟件編譯程序,對(duì)人體腰部輔助外骨骼運(yùn)動(dòng)軌跡進(jìn)行仿真,如圖6所示。初始狀態(tài)相對(duì)水平面角度為30°,抬起重物后相對(duì)水平面角度為90°。重物運(yùn)動(dòng)軌跡如圖7所示。可以看到重物的運(yùn)動(dòng)軌跡為一條直線,并且提升高度為0.53 m。應(yīng)用所提出的控制策略,使人體腰部輔助外骨骼運(yùn)動(dòng)軌跡穩(wěn)定,并且沒(méi)有曲線走向,保證了勞動(dòng)者在搬用重物過(guò)程中的姿態(tài)平穩(wěn)。
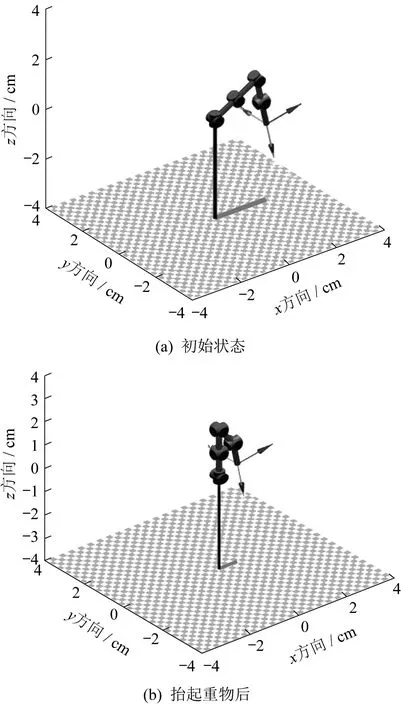
圖6 人體腰部輔助外骨骼運(yùn)動(dòng)軌跡
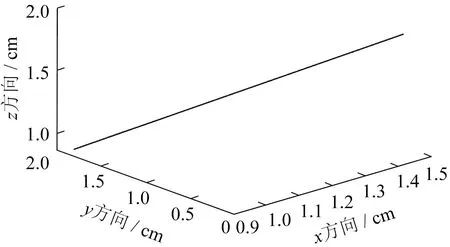
圖7 重物運(yùn)動(dòng)軌跡
為了進(jìn)一步觀察運(yùn)動(dòng)情況,對(duì)人體腰部輔助外骨骼基本運(yùn)動(dòng)特征進(jìn)行仿真,如圖8所示。
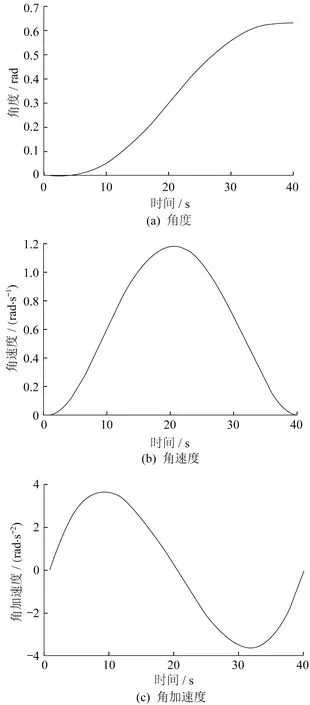
圖8 人體腰部輔助外骨骼運(yùn)動(dòng)特征仿真
初始狀態(tài)和抬起重物后,角速度和角加速度均為0,保證運(yùn)動(dòng)過(guò)程中過(guò)渡平穩(wěn),避免剛性碰撞,也減少電機(jī)的損傷。
7 試驗(yàn)
7.1 試驗(yàn)設(shè)備
人的背部運(yùn)動(dòng)有超過(guò)29種肌肉參與[14]。直立脊柱是使脊柱直立的最重要部位之一,位于脊柱的兩側(cè),連接頭部和尾骨,主要由脊柱和經(jīng)肌組成。臨床研究發(fā)現(xiàn),腰背痛多由椎體肌肉張力引起。肌電圖振幅可以反映肌肉的活動(dòng),選擇豎脊肌作為評(píng)估對(duì)象。
用于記錄肌電信號(hào)的設(shè)備采樣率為1 000 Hz,有八個(gè)通道和一個(gè)參考電極。小型無(wú)線適配器連接到計(jì)算機(jī)主機(jī)的通用串行點(diǎn)線接口,數(shù)據(jù)傳輸通過(guò)無(wú)線保真通信實(shí)現(xiàn)。在受試者前方放置一個(gè)標(biāo)準(zhǔn)帶手孔的儲(chǔ)物箱,尺寸為53 mm×39mm×30 mm。試驗(yàn)中使用六種不同質(zhì)量的重物,分別為0、5 kg、10 kg、15 kg、20 kg、25 kg,分析受試者背部左右兩側(cè)三塊豎脊肌的肌電信號(hào)。豎脊肌如圖9所示,分別為L(zhǎng)3椎層間4 cm腰豎脊肌、T9椎層間4 cm胸豎脊肌、背闊肌。受試者背部電極位置如圖10所示。
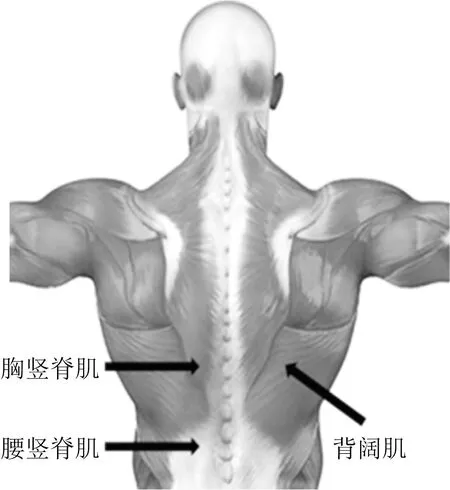
圖9 豎脊肌
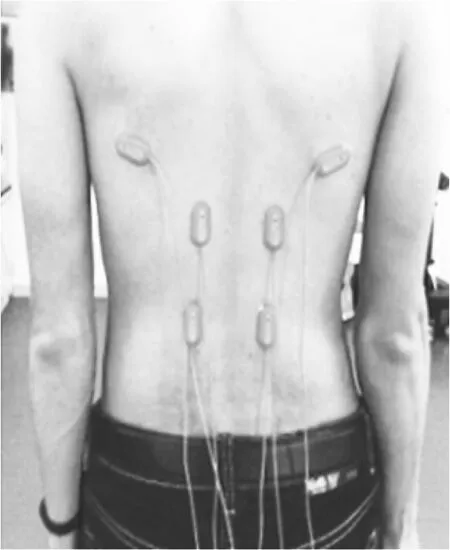
圖10 受試者背部電極位置
7.2 試驗(yàn)過(guò)程
為了得到實(shí)際重物搬運(yùn)過(guò)程中的運(yùn)動(dòng)特征,選擇10名無(wú)腰椎疾病史或脊柱疾病史的受試者,平均年齡為25歲,體重為75 kg,身高為175 cm,自愿參與研究,進(jìn)行搬運(yùn)重物試驗(yàn)。受試者開(kāi)始保持弓腰姿勢(shì),然后開(kāi)始慢慢向后,以彎腰姿勢(shì)舉起重物。舉起重物后,受試者雙腿直立,保持提重物5~8 s時(shí)間。試驗(yàn)過(guò)程如圖11所示。

圖11 試驗(yàn)過(guò)程
7.3 試驗(yàn)結(jié)果
10名受試者參與試驗(yàn),分別記錄穿戴和不穿戴人體腰部輔助外骨骼時(shí)下背部腰豎脊肌、胸豎脊肌、背闊肌的肌電信號(hào)。經(jīng)過(guò)帶寬為10~500 Hz的濾波等肌電圖信號(hào)處理,計(jì)算得到在一個(gè)提升周期內(nèi)的積分肌電圖值[15-16]。將人體腰部輔助外骨骼的輔助效率η定義為:
η=1-Tη/T
(34)
式中:Tη為受試者穿戴人體腰部輔助外骨骼負(fù)重時(shí)的肌電圖值;T為受試者不穿戴人體腰部輔助外骨骼負(fù)重時(shí)的肌電圖值。
根據(jù)初步統(tǒng)計(jì)分析,左右肌肉的肌電圖信號(hào)沒(méi)有明顯差異,因此將左右肌肉的肌電圖數(shù)據(jù)匯總,然后取平均值。試驗(yàn)肌電圖如圖12所示。
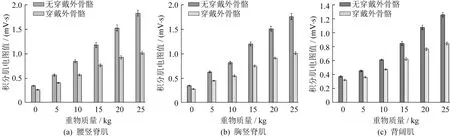
圖12 試驗(yàn)肌電圖
試驗(yàn)數(shù)據(jù)統(tǒng)計(jì)見(jiàn)表2,可以看出在人體腰部輔助外骨骼的幫助下,明顯減少了豎脊肌的活動(dòng)。當(dāng)受試者穿戴人體腰部輔助外骨骼搬運(yùn)重物時(shí),腰豎脊肌、胸豎脊肌、背闊肌的平均積分肌電圖值依次減小34.5%,33.9%、24.2%。當(dāng)受試者穿戴人體腰部輔助外骨骼搬運(yùn)相同質(zhì)量的重物時(shí),腰豎脊肌和胸豎脊肌的積分肌電圖值減小速度要比背闊肌大。隨著重物質(zhì)量的增大,豎脊肌的肌肉活動(dòng)逐漸增加。試驗(yàn)結(jié)果表明,人體腰部輔助外骨骼可以減輕肌肉疲勞,幫助減輕勞動(dòng)者長(zhǎng)期工作的負(fù)擔(dān)和背部疼痛,并減少腰肌勞損。
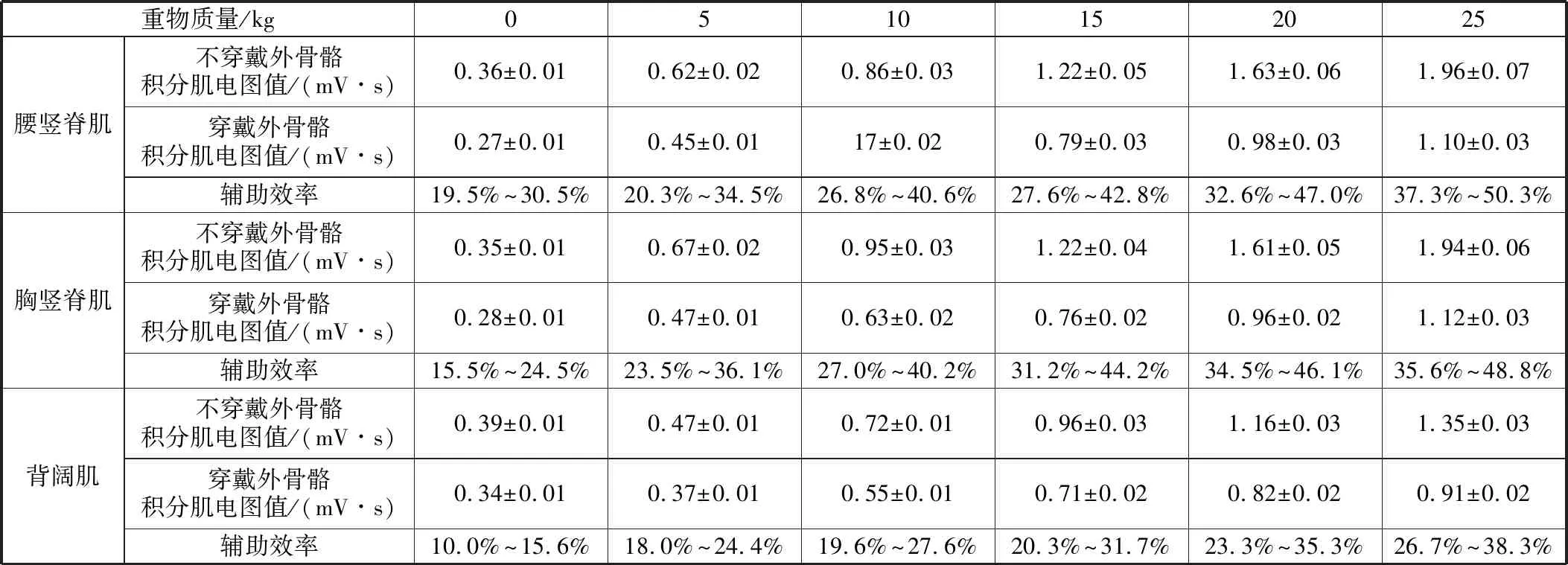
表2 試驗(yàn)數(shù)據(jù)統(tǒng)計(jì)
8 運(yùn)動(dòng)特征對(duì)比
人體腰部輔助外骨骼運(yùn)動(dòng)特征對(duì)比如圖13所示。人體腰部輔助外骨骼可以根據(jù)不同勞動(dòng)者的初始狀態(tài)生成角度平滑的軌跡,并根據(jù)所提出的控制算法完成電機(jī)運(yùn)動(dòng)。角速度、角加速度初始狀態(tài)和抬起重物后的仿真、實(shí)際值都是0,對(duì)比結(jié)果表明,基于自適應(yīng)控制算法的運(yùn)動(dòng)軌跡能夠滿足理論要求,避免運(yùn)動(dòng)過(guò)程中的沖擊。

圖13 人體腰部輔助外骨骼運(yùn)動(dòng)特征對(duì)比
9 結(jié)束語(yǔ)
筆者對(duì)人體腰部輔助外骨骼進(jìn)行機(jī)械結(jié)構(gòu)設(shè)計(jì),對(duì)外骨骼的關(guān)鍵部位進(jìn)行有限元分析,為外骨骼選材提供了理論依據(jù)。
將人體抬起重物過(guò)程簡(jiǎn)化為坐標(biāo)連桿模型,采用歐拉拉格朗日方程建立系統(tǒng)動(dòng)力學(xué)模型,為設(shè)計(jì)控制方法提供了理論基礎(chǔ)。
針對(duì)建立的動(dòng)力學(xué)模型,提出一種基于自適應(yīng)算法的人體腰部輔助外骨骼控制方法。
通過(guò)試驗(yàn),穿戴人體腰部輔助外骨骼搬運(yùn)25 kg重物,與不穿戴相比,對(duì)于腰豎脊肌、胸豎脊肌、背闊肌輔助效率依次為37.3%~50.3%、35.6%~48.8%、26.7%~38.3%。
試驗(yàn)表明,穿戴人體腰部輔助外骨骼能夠有效減輕勞動(dòng)者的肌肉疲勞。
借助MATLAB軟件強(qiáng)大的數(shù)學(xué)分析能力,對(duì)提出的控制方法進(jìn)行軌跡規(guī)劃,并通過(guò)受試者搬運(yùn)重物過(guò)程與仿真結(jié)果對(duì)比,確認(rèn)具有良好的人機(jī)相容性。
