一種單電機旋轉電爪的設計研究
2024-05-27 00:00:00滕明權
消費電子 2024年4期
關鍵詞:自動化
【關鍵詞】自動化;單電機;旋轉;電爪;磁性聯軸器;齒輪齒條
一、結構及工作原理
(一)工作原理
本旋轉電爪設計的驅動源為雙輸出軸直流電機或步進電機,轉盤與機座間的位置鎖定通過磁性聯軸器實現,在控制上,儀器通過程序可控制電機工作電流或電壓的大小,從而達到改變電機輸出力矩大小的目的,當電機輸出力矩小于磁性聯軸器的打滑力矩時,電機可帶動兩個夾爪同步夾緊或松開,此時,因磁性聯軸器的作用,轉盤與機座相對位置不動。
當電機輸出力矩大于磁性聯軸器的打滑力矩時,電機帶動轉盤回轉,當夾爪處于夾緊狀態是,轉盤上的兩個夾爪夾著物體同步轉動,同時保持夾爪位置不動,保證物體不會掉落,當夾爪處于松開狀態時,夾爪張開到最大位置后,轉盤帶著夾爪在最大張開狀態下同步回轉[2]。
工作時,電機先以小力矩逆時針回轉,帶動齒輪驅動夾爪上的齒條同步對稱移動,兩夾爪對稱收回夾緊物體,然后以大力矩同向繼續回轉帶動轉盤回轉,轉盤帶著夾爪,及夾取的物體同步回轉,實現夾緊物體后轉位,轉到設定位置后停止,電機以保持力矩維持夾爪夾緊物體不掉落。
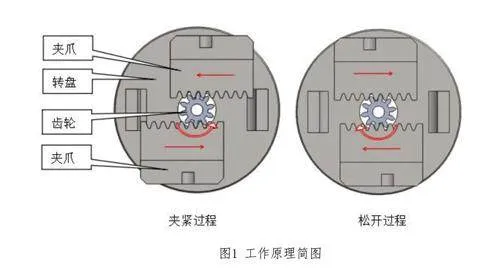
當電機以順時針小力矩回轉時,齒輪驅動夾爪上的齒條同時對稱移動,兩夾爪對稱張開,將物體松開放下,當張開到最大后,繼續以同向大力矩回轉帶動轉盤轉動,實現轉盤零點復位[3]。
工作原理簡圖如圖1所示:
(二)結構特點
本設計由電機、機座、轉盤、齒輪、2條導軌、2個夾爪、3個光耦、2個軸承、上擋片、下擋片、光耦板、多個磁鐵、軸用擋圈、螺釘等組成,夾爪形狀可視夾取物體形狀來設計,本設計為平行夾爪,方便夾取兩面平行的物體,結構簡圖見圖2。
機座周邊開有連接螺紋孔,儀器通過該螺紋孔來靈活的固定整個回轉電爪到儀器上。電機為雙輸出軸電機,一端為負載輸出,尾端為光耦板安裝端,兩個輸出軸同軸、同步回轉,電機通過螺釘固定在機座上,電機輸出負載軸上固定一個齒輪,齒輪與輸出軸采用過盈配合來傳遞扭矩,輸出尾軸上固定有上擋片,擋片邊緣開有一個小槽,用來觸發夾爪最大、最小行程光耦,上擋片采用頂緊螺釘緊固,裝配時,先把夾爪行程調到最小,然后轉動上擋片,讓上擋片的小槽,正好觸發夾爪最小行程光耦,此時頂緊上擋片。
轉盤通過兩個法蘭球軸承與機座連接,通過軸用擋圈限制軸向位移,可360度轉動,轉動靈活,無虛位。兩根導軌對稱安裝在轉盤下部的兩側,導軌為精密直線導軌,精度高,免維護。兩個卡爪分別固定在導軌滑塊上,可隨著滑塊移動,夾爪無虛位,重復定位精度高,本設計的圖示卡爪為夾取平面類物體,夾取不同形狀的物體時,夾爪需按物體外形改動,以便契合外形,增加接觸面,防止夾變形或掉落;卡爪上的齒條與齒輪嚙合,齒輪轉動時,帶動兩個卡爪同步對稱移動,實現夾爪夾緊或松開[4]。

機座和轉盤上分布一圈小孔,分別以S、N交錯安裝有一圈磁鐵,形成磁性聯軸器,保持轉盤與機座相對位置,通過采用不同磁強度的磁鐵,或不同尺寸的磁鐵,或不同數量的磁鐵,或改變兩組磁鐵間的距離等,可調節磁性聯軸器的最大傳遞力矩;另外,為改善磁性聯軸器打滑時產生的抖動,可以采用更密集的磁鐵分布,減少兩磁鐵間的間距來改善,或將磁性聯軸器改為磁性吸附阻尼器,也可將磁性聯軸器改為電磁吸附阻尼器,回轉將變得平滑順暢。轉盤下方安裝有下擋片,隨著轉盤轉動,用來觸發轉盤零位。光耦板通過螺釘固定在機座上,上方安裝有兩個光耦,分別用于檢測卡爪行程的最大、最小位置,下方安裝有一個光耦,用于檢測轉盤的零位,裝配時,通過工裝將轉盤零位確定,調節下擋片正好觸發零位光耦,然后緊固[5]。
(三)工作流程
1.上電復位:上電后,電機先以大力矩逆時針轉動,輸出軸上的齒輪先驅動卡爪夾緊,再帶動轉盤回到零位,然后通過光耦判斷卡爪行程是否處于最小位置,如是,說明卡爪間無物體,如不是,說明卡爪間夾有物體,電機再以小力矩順時針轉動,齒輪帶動卡爪張開到最大,并觸發光耦,回轉電爪完成復位。
2.夾取物體回轉:電機先以小力矩逆時針轉動,輸出軸上的齒輪驅動卡爪夾緊物體,然后通過光耦判斷卡爪行程是否處于最小位置,如是,說明卡爪間無物體,如不是,說明卡爪間夾有物體,電機再以大力矩逆時針轉動,帶動轉盤回轉到設定位置[6]。

3.松開物體復位:電機先以小力矩順時針轉動,輸出軸上的齒輪驅動卡爪松開物體,然后通過光耦判斷卡爪行程是否處于最大位置,如是,說明卡爪已經順利張開,如不是,說明出錯,電機再以大力矩順時針轉動,帶動轉盤回轉到零位,讀取零位光耦信號確認,完成復位。
(四)存在的缺點及改善
本設計的單電機旋轉電爪,夾緊與回轉,電機需逆時針方向轉動,順時針方向轉動時為松開和復位,不適合一些應用場景,如夾緊后旋轉開蓋、關蓋等,且只有兩卡爪,不適用需要多卡爪對稱夾緊的場合。因磁性聯軸器特性,回轉時有一些抖動,不適合對要求運行平穩的場合,可以采用更密集的磁鐵分布,減少磁鐵間的間距來改善;或將磁性聯軸器改為磁性吸附阻尼器,也可將磁性聯軸器改為電磁吸附阻尼器,回轉將變得平滑順暢[7]。最大夾緊力為磁性聯軸器的打滑力矩,夾緊力大小不方便調節,可將磁性聯軸器改為電磁鐵吸附阻尼器,通過程序控制電磁鐵通過的電流大小,從而改變電磁鐵吸力大小,進而調節電磁鐵吸附阻尼器阻力值來改善[8]。
二、運動分析
(一)夾爪張開回轉模擬
結果和圖解查看,進入結果和圖解選項,在結果欄下拉框中,選取類別:力;選取子類別:馬達力矩;選取結果分量:幅值;選取旋轉馬達對象:旋轉馬達1,確定生成力矩圖解圖4。
從圖4分析,可看出單電機旋轉電爪在張開過程中,前半段夾爪張開,馬達所需力矩較小,當夾爪張開到最大后,電機繼續轉動時,馬達力矩急劇上升,當達到轉盤磁性聯軸器打滑力矩后,轉盤同步轉動,馬達輸出力矩趨于平穩。從運動分析過程,及結果和圖解可看出,單電機旋轉電爪的張開過程,與預期一致,達到設計要求。

(二)夾爪夾緊回轉模擬
使用SOLIDWORKS打開單電機旋轉電爪數模,夾爪處于最大張開狀態,通過SOLIDWORKS Motion 插件進行運動分析,設置旋轉馬達:電機軸相對于機座逆時針轉動,等速60 RPM;設置接觸對:齒輪與兩個夾爪分別設置接觸組,兩個夾爪間設置接觸組,材料選STEEL;設置彈簧:轉盤與機座間旋轉扭矩彈簧,彈簧力表達式指數選線性,k值取0.1N/度,阻尼力表達式指數選線性,C值取10N/度,在卡爪與機座間分別設置較小阻尼力,模擬導軌運行阻力,拉動鍵碼到1S,設置好的運動計算菜單見圖3,提交計算。
結果和圖解查看,進入結果和圖解選項,在結果欄下拉框中,選取類別:力,選取子類別:馬達力矩,選取結果分量:幅值,選取旋轉馬達對象:旋轉馬達1,確定生成力矩圖解圖5。
從圖5分析,可看出單電機旋轉電爪在夾緊過程中,前半段夾爪夾緊,馬達所需力矩較小,當夾爪夾緊后,電機繼續轉動時,馬達力矩急劇上升,當達到轉盤磁性聯軸器打滑力矩后,轉盤同步轉動,馬達輸出力矩趨于平穩。從運動分析過程,及結果和圖解可看出,單電機旋轉電爪的夾緊過程,與預期一致,達到設計要求。
對比張開和夾緊過程受力圖解,可看出馬達輸出力矩曲線基本相同,與設計預期一致。

結論
通過簡化設計的單電機旋轉電爪,實現了預期的夾爪夾緊、轉盤帶夾爪一起回轉、夾爪松開復位、轉盤復位等功能動作。夾爪導向由常用的滑槽,改為精密直線導軌,壽命長、阻力小、精度高,無需維護,夾爪無虛位。轉盤與機座的鎖定,采用磁性聯軸器,相互間不接觸,無磨損,終身免維護。夾爪的夾緊與張開,采用齒輪齒條傳動,對稱開合,定位精度高,全行程力臂一致,簡化受力模型。通過使用SOLIDWORKS Motion 進行運動受力分析,輸出結果和圖解圖,通過分析結果和圖解圖可看出設計達成了預期要求。該設計整體結構簡單、體積小、成本低、運動可靠,性價比較高,為小型自動化設備的進一步小型化,提供了可能,同時也較好的增加了儀器的性價比。
猜你喜歡
經營者(2016年12期)2016-10-21 07:39:01
中國科技博覽(2016年19期)2016-10-19 14:47:24
中國科技博覽(2016年19期)2016-10-19 13:40:37
中國科技博覽(2016年18期)2016-10-19 07:01:13
中國市場(2016年36期)2016-10-19 03:40:15
科學與財富(2016年28期)2016-10-14 21:28:54
科學與財富(2016年28期)2016-10-14 19:52:27
科學與財富(2016年28期)2016-10-14 19:49:55
科學與財富(2016年28期)2016-10-14 19:33:38
科學與財富(2016年28期)2016-10-14 03:14:22