焊接機器人降低空閑損耗的方法研究
2024-06-03 05:45:03黃曉東李錚王凱
中國標準化 2024年5期
關鍵詞:標準
黃曉東 李錚 王凱
摘 要:焊接機器人的組成部分之一是焊接設備,而隨著2019年10月1日歐盟發布的(EU)No 2019/1784《電焊機的生態設計要求》焊接設備空閑損耗概念的引進,焊接機器人也將迎來一次重大的技術革新。本文指出了空閑損耗狀態對于焊接機器人的效率制約,從機械臂、控制系統、焊接設備、安全系統四個方面介紹了有效抵消空閑損耗的方法,其中焊接設備部分結合試驗數據做了著重分析,從功率器件、主變壓器磁芯、控制模塊和冷卻系統入手,找出了高功耗的原因,提出了相應的解決方案,對焊接機器人的綠色可持續發展有積極推動作用。
關鍵詞:焊接機器人,空閑損耗,焊接設備,標準
DOI編碼:10.3969/j.issn.1002-5944.2024.05.026
0 引 言
我國焊接機器人產業起步較晚,在焊接機器人減速器、傳感器、控制器等核心技術領域與世界主要機器人生產國家美德日韓等還有很大差距。隨著2023年1月歐盟(EU)No 2019/1784能效指令的強制實施,進入歐盟市場的弧焊電源必須滿足空閑損耗不高于50W的指標要求[1],這對于我國焊接機器人工業發展起到了一定的制約效果,研究如何打破這種技術壁壘對于焊接機器人產業的長遠發展勢在必行。
焊接機器人的工作流程一般包括四個步驟。首先通過傳感器系統感知焊接環境和工件狀態對焊接材料特性做出合理選擇;然后機器人控制系統根據預設的焊接參數規劃機械臂的運動軌跡;接下來焊接設備通電,為機械臂執行焊接操作提供持續的能量輸出;為確保焊接質量的穩定性[2],最后還需要通過控制系統的反饋和監控功能對整個焊接過程實時調整,形成閉環操作。本文按以上工作步驟,對每一個流程涉及到的軟硬件進行了詳細分解、認真分析,較全面地總結歸納了焊接機器人空閑狀態時高功耗的原因和解決辦法。
1 機械臂部分
機械臂是焊接機器人的骨骼和肌肉,它由多個關節連接而成,具有多自由度、柔性化[3]的運動能力。機械臂的空閑狀態損耗相對較小,尤其是與實際焊接操作相比。其空閑狀態下通常會有以下能量和資源的損耗。
(1)維持能耗。機械臂在空閑狀態下仍需維持一定的電力供應,以保持其電子系統的運行和待命狀態。
(2)熱量散失。機械臂的電子元件和電機在運行過程中會產生一定的熱量,即使在空閑狀態下,機械臂仍需散發這些熱量,以保持元件和電機的正常工作溫度。
(3)氣壓損耗。某些焊接機器人的機械臂可能需要使用氣壓來驅動一些執行器或輔助設備。即使在空閑狀態下,機械臂可能需要維持一定的氣壓供應,以保持這些設備的待命狀態,這會導致氣壓的損耗。
為了最大程度地減少空閑狀態損耗,本部分可以采取一些措施,如優化機械臂的待機模式、合理調整電力供應、定期維護和保養等,以提高能源利用效率和減少資源浪費。
2 控制系統
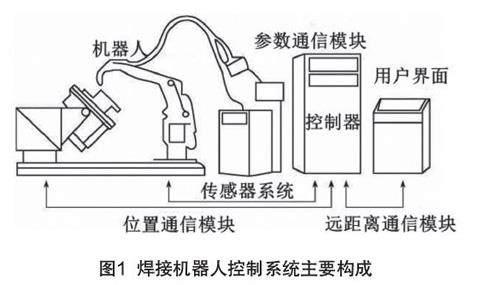
焊接機器人的控制系統是指用于控制和管理機器人的硬件和軟件組件。它負責監控和調節機器人的運動、焊接參數和操作過程,以實現精確、平滑[4]的焊接操作。焊接機器人的控制系統通常由圖1所示控制器、通信模塊、傳感器系統三個主要部分[5]構成。
(1)控制器。控制器是焊接機器人控制系統的核心部件,它負責接收和處理來自傳感器和用戶輸入的信號,并控制機器人的運動和焊接操作。控制器通常包括硬件和軟件兩個組成部分,硬件部分包括主控板、輸入輸出接口等,用于接收和發送信號,軟件部分包括控制算法、運動規劃算法、路徑規劃算法[6]等,用于實現焊接任務的自動化控制。為減少空閑狀態損耗,硬件部分可以采用功耗較小的主控板(如神經元芯片)取代傳統高耗能芯片,接口用RS422串口代替RS232和RS485串口,既能實現高效率數據傳輸,又能解決RS485只能半雙工的缺陷。軟件部分則可以根據硬件的信息反饋,設計更精確的系統休眠和響應時間,工作時高效運行,空閑時迅速休眠。
(2)通信模塊。建議用5G無線通信模塊代替傳統高能耗的CAN總線、LIN總線、Ethernet通信模式,實現高速率信息反饋的同時也極大地降低了線路傳輸帶來的空閑狀態損耗。
(3)傳感器系統。傳感器系統用于感知焊接環境和工件狀態,以便控制系統能夠做出相應的調整和決策。常見的傳感器包括視覺傳感器、力傳感器、溫度傳感器等。視覺傳感器可以用于檢測焊縫位置和形狀,力傳感器可以用于檢測焊接力度,溫度傳感器可以用于監測焊接過程中的溫度變化。對空閑狀態的準確感知是傳感器系統實現低功耗的研究重點,相較于Honeywell霍尼韋爾傳感器、Interface傳感器,ABB傳感器更加匹配焊接機器人復雜的傳感器系統,不僅能實現實時控制,更能自動優化系統,實現控制系統的智能化。
3 焊接設備
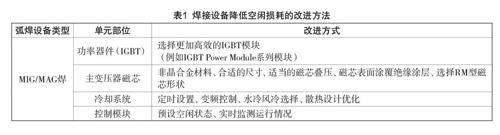
山東省產品質量檢驗研究院已于2022年底開展焊接設備的空閑損耗降低策略研究,項目結合了焊機能效標準GB 28736—2019和安全標準GB/ T15579.1—2013的試驗方法,目前取得的成果如表1所示。
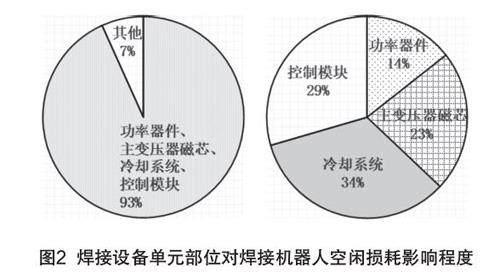
本部分研究按照實際情況進行了兩組試驗,第一組試驗設置了其他影響單元和功率器件、主變壓器磁芯、冷卻系統、控制模塊做為一個整體的影響單元,分析了四個單元部位做為整體對焊接機器人空閑損耗的影響程度。第二組試驗對四個單元部位進行了分項研究,結果如圖2所示。
試驗數據顯示,弧焊設備的功率器件、主變壓器磁芯、冷卻系統和控制模塊是影響焊接機器人空閑損耗的四個主要因素,焊接設備要降低空閑狀態損耗,按對焊接機器人整個系統空閑損耗貢獻值從小到大可以采取以下措施。
(1)功率器件。應根據具體應用需求和設計要求進行評估和選擇,在成本控制合理的基礎上采購更加高效的IGBT模塊,使弧焊設備空閑運行時功耗更低。
(2)主變壓器磁芯。選擇具有低磁滯和低損耗特性的磁芯材料,常見的磁芯材料包括硅鋼片、鐵氧體和非晶合金等,非晶合金材料具有更低的損耗;選擇適當的磁芯形狀,以最大程度地減少磁通漏磁和渦流損耗,不同形狀的磁芯適用于不同的應用和功率級別;選擇適當的磁芯尺寸;適當的磁芯疊壓可以提高磁通密度,從而減少磁芯的尺寸和損耗;在磁芯表面涂覆絕緣涂層可以減少渦流損耗,絕緣涂層可以阻止渦流在磁芯表面形成,從而減少能量損耗。
(3)控制模塊。采用智能控制系統來監測焊機的工作狀態和溫度,并根據實時需求調整冷卻系統的運行,智能控制系統可以根據焊機的負荷和溫度變化,自動調整冷卻系統的運行速度和功耗,間接降低空載電流[7],避免過度冷卻和能量浪費。
(4)冷卻系統。使用更精確的溫度傳感器監測焊機的溫度,并根據需要調整冷卻系統的運行;采用變頻控制技術來調節冷卻系統的運行速度,根據焊機的工作負荷和溫度需求,調整冷卻系統的轉速,以減少能耗;進行合理的散熱設計,包括優化散熱器的布局和尺寸,增加散熱面積,改善熱風道設計。
4 安全系統
焊接機器人的安全系統主要包括休眠模式、傳感器監測、自動關機、強制關機四個部分,強制關機對整體的空閑損耗影響相對較小,可以做為省略項排除不作為研究內容,針對其他四個部分有以下幾個方面的改進措施。
(1)休眠模式。將焊接機器人配置為具有休眠模式,當機器人處于空閑狀態時,可以自動進入休眠模式,休眠模式可以通過降低電源供應、關閉部分電路或減少電機轉速等方式實現。需要注意的是,在實際應用過程中,部分運維人員出于其他考慮不會開啟休眠功能[8],應定期開展此方面培訓,增強節能意識。
(2)傳感器監測。使用傳感器監測機器人周圍的環境和工件狀態。當機器人沒有焊接任務時,傳感器可以檢測到是否有人員或物體靠近,以及工件是否準備好。根據傳感器的反饋,可以決定機器人是否繼續運行或進入休眠狀態,保證工程時間及質量[9]的同時降低能耗。
(3)自動關機。當機器人連續一段時間沒有進行焊接任務時,可以自動關機。通過設置自動關機功能,可以避免機器人長時間處于空閑耗能狀態,減少能耗。
5 結 語
為滿足焊接機器人正常焊接工作,空閑損耗的極大降低是本階段解決整體損耗過高的主要關注點。通過對焊接機器人的機械臂、控制系統、焊接設備、安全系統四個方面進行分析研究,綜合采取上述措施可以有效降低空閑狀態的損耗,提高設備的效率和能源利用效率,減少資源浪費。在焊接機器人在實際應用中,工況更加多變且環境具有不確定性,應根據具體需求和設計要求,選擇適當的措施和技術,實現最佳的能耗和功耗優化效果。
參考文獻
[1]Ecodesign requirements for welding equipment pursuant:(EU)No 2019/1784[S].
[2]吳海州. 焊接機器人技術發展探究[ J ] . 內燃機與配件,2023(20):93-95.
[3]曹正.焊接機器人的發展現狀和機器人焊接質量控制[J].現代制造技術與裝備,2023,59(8):154-156.
[4]姚宇,張秋菊,陳宵燕,等.復雜空間曲面焊接機器人自動編程系統[J].焊接學報,2023,44(5):122-128.
[5]霍厚志,楊朔,劉龍飛,等.我國焊接機器人應用現狀及關鍵技術概述[J].焊管,2023,46(5):1-7+28.
[6]劉徐.智能化焊接機器人的技術分析[ J ] .集成電路應用,2022,39(9):308-309.
[7]王瑋,陳會嶺,潘小燕,等.電焊機節能裝置的設計[J].機電產品開發與創新,2012,25(3): 56-57.
[8]梁露露, 劉強, 劉絢,等.低負載率下數據中心模塊化UPS的智能休眠技術研究[J ].電信工程技術與標準化2023,36(z1):84-88.
[9]吳超,崔瑩瑩,楊瑞,等.基于能力模型的管道環焊縫缺陷修復制約因素分析及建議[J].科技和產業,2020,20(10):209-213.
作者簡介
黃曉東,本科,工程師,研究方向為電焊機、電機及其他電氣產品的質量檢測與標準。
(責任編輯:袁文靜)
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
當代陜西(2019年8期)2019-05-09 02:22:48
上海建材(2019年1期)2019-04-25 06:30:48
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
家庭影院技術(2018年4期)2018-05-09 07:07:52
專用汽車(2016年4期)2016-03-01 04:13:43
質量與標準化(2015年9期)2015-12-31 11:41:40
中國質量與標準導報(2014年4期)2014-03-11 19:54:25
中國質量與標準導報(2014年10期)2014-02-28 22:25:47
中國質量與標準導報(2014年7期)2014-02-28 22:24:39