谷神星一號運載火箭的時變模態參數辨識
2024-06-15 06:31:08馬志賽丁千劉百奇劉建設張軍鋒董威利
振動工程學報 2024年5期
馬志賽 丁千 劉百奇 劉建設 張軍鋒 董威利

摘要: 針對運載火箭這一大型復雜系統,單純依靠機理分析難以建立能夠精確描述其時變特征的動力學模型,借助模態辨識技術獲取其在飛行狀態下的時變動力學特性尤為必要。面向運載火箭的飛行模態辨識需求,發展基于時變自回歸滑動平均模型的僅輸出遞推辨識方法,引入指數加權遺忘機制進行時變特性跟蹤,能夠在激勵未知的情況下僅基于響應數據準確快速辨識運載火箭的時變模態。以谷神星一號運載火箭為例,開展飛行遙測數據的快速處理,準確辨識發射準備階段和飛行階段的關鍵低階時變模態,辨識結果與有限元分析結果的變化規律相互吻合,驗證了所提時變模態僅輸出遞推辨識方法是有效可行的,服務了運載火箭有限元模型修正和姿控系統設計的實際工程需求。
關鍵詞: 運載火箭; 時變模態參數; 谷神星一號; 遞推辨識
中圖分類號: V475.1; O327??? 文獻標志碼: A??? 文章編號: 1004-4523(2024)05-0729-08
DOI: 10.16385/j.cnki.issn.1004-4523.2024.05.001
引? 言
太空探索是世界強國為提升綜合國力、搶占科技制高點、保持核心競爭力而大力發展的戰略性新興產業。航天器進入太空的過程需要借助運載器來克服地球引力,新一代運載火箭追求更高的運載效率,其尺寸與推力不斷增大,面臨的發射與運行環境愈加惡劣,結構系統設計難度日益增加。例如,針對運載火箭這一大型復雜系統,單純依靠機理分析難以建立能夠精確描述其時變特征的動力學模型,仍需要依靠模態辨識技術來獲取其真實飛行狀態下的時變動力學特性。因此,為更好地滿足航天工程高可靠、低成本和快速響應的發射需求,從結構動力學反問題入手,開展運載火箭時變模態參數辨識的關鍵技術攻關和方案深化論證,對解決運載火箭的相關動力學與控制問題意義重大[1?3]。
由于燃料快速消耗和級間分離,飛行狀態下的運載火箭會表現出顯著的時變特征,準確獲取其時變模態對姿控系統設計、動載荷設計、天地差異研究和系統優化設計等都具有重要意義[2?6]。以姿控系統設計為例,運載火箭主要依靠陀螺敏感姿態進行控制以實現穩定飛行。在實際飛行中,陀螺感受到的姿態信息不僅包含剛體姿態,還包含箭體彈性變形所引起的附加姿態,姿控系統的設計必須考慮彈性振動的影響,否則可能會導致姿態發散,飛行失敗[2?3,7]。然而為了保證良好的氣動特性與運載效率,運載火箭常常呈現出長細比大、結構質量占比低的特點,導致其彈性振動頻率接近剛體穿越頻率且具有較寬的變化范圍,在擴大陷波濾波器凹陷寬度的同時,還需要增加相位穩定方案。例如,Ares?I運載火箭的長細比約為17,其一級火箭結構的一階彎曲模態低至0.9 Hz,與一級火箭PID控制器的帶寬非常接近[8],燃料快速消耗會導致固有頻率不斷發生變化,大大增加了姿控系統的設計難度[9]。此外,以往飛行試驗的遙測數據表明,由于無法準確模擬飛行狀態下運載火箭的真實工作環境,通過有限元分析或地面振動試驗獲得的模態參數往往與飛行狀態下的真實值存在一定差異,這進一步增加了姿控系統的設計難度[10?12]。因此,充分利用天地試驗數據和模態辨識理論發展運載火箭時變模態辨識技術,將是未來實現運載火箭彈性振動智能控制與實時決策的必經途徑。
近十年來,隨著辨識理論與測試技術的不斷發展,工作模態分析在航天領域已取得一定進展。James等[13?14]對運載火箭工作模態分析方法進行了綜述,并指出時變的系統特性、非定常的運行環境及其所導致的非平穩振動響應,是解決運載火箭時變模態辨識問題的主要挑戰。De Vivo等[5]基于歐空局Vega火箭的飛行數據,采用自然激勵技術(NExT)生成相關函數,在短時時不變假設下采用最小二乘復指數法估計模態參數,與有限元分析結果吻合良好。張家雄等[15]采用PolyMAX方法對飛行器低空飛行試驗中典型部位的低頻振動實測數據進行辨識,將模態辨識結果與地面振動試驗進行對比,發現兩者固有頻率接近,模態振型基本吻合,但也存在一定偏差。針對飛行遙測數據信噪比低、辨識結果虛假模態多的問題,王亮等[16?17]將自回歸滑動平均(ARMA)方法與NExT相結合用于飛行模態辨識,并基于穩定圖對真實模態進行了篩選。隨后王亮等[6]又研究了特征時段選擇對飛行模態辨識結果的影響,指出在使用遙測數據進行模態辨識時,應選擇低階模態響應信噪比較高的數據段。南宮自軍等[2]以Ares I?X運載火箭飛行模態辨識[4]為案例,對飛行模態辨識技術的研究現狀和未來發展方向進行了綜述。董嚴等[18]采用ARMA方法對某火箭飛行試驗中三個測點的實測數據進行辨識,得到了其橫向模態參數隨時間的變化規律。馬志賽等[19]對子空間方法、時間序列方法等時域辨識方法進行了系統性總結,指出在復雜噪聲環境下開展在線、自適應時變模態辨識及其工程應用是未來的發展重點。Ma等[20?21]基于時變自回歸滑動平均(TARMA)模型提出了一系列時變模態僅輸出遞推辨識方法,并搭建大長細比變質量充液筒試驗平臺,完成了辨識方法的實驗驗證,為開展運載火箭飛行模態辨識奠定了基礎。余磊等[22]發展了一種基于TARMA模型的時變模態批量辨識方法,并利用Ariane?5運載火箭芯級的數值仿真數據對所提方法進行了數值驗證。馬慶港等[3]對運載火箭工作模態辨識方法及流程進行了綜述,指出準確獲取模態參數對運載火箭有限元模型修正、自適應控制、實時狀態監測等均具有重要意義。
隨著運載火箭重量、推力和長細比的進一步增大,其振動特性愈加復雜,固有頻率呈現出低且密集的特點,具有顯著時變特性的結構系統與控制、氣動、動力等分系統之間的耦合問題也日漸突出。為獲取谷神星一號運載火箭的全周期模態信息,本文旨在發展適用于運載火箭的時變模態僅輸出遞推辨識方法,以期在激勵未知的情況下,僅基于響應數據辨識運載火箭的飛行模態。在此基礎上,借助遞推辨識方法計算量和所占用內存空間較小,以及對計算機的處理能力和存儲空間要求較低的優勢,開展谷神星一號運載火箭飛行遙測數據的快速處理,準確辨識其主要低階飛行模態,服務相關系統設計需求。
1 谷神星一號運載火箭
1.1 發射記錄
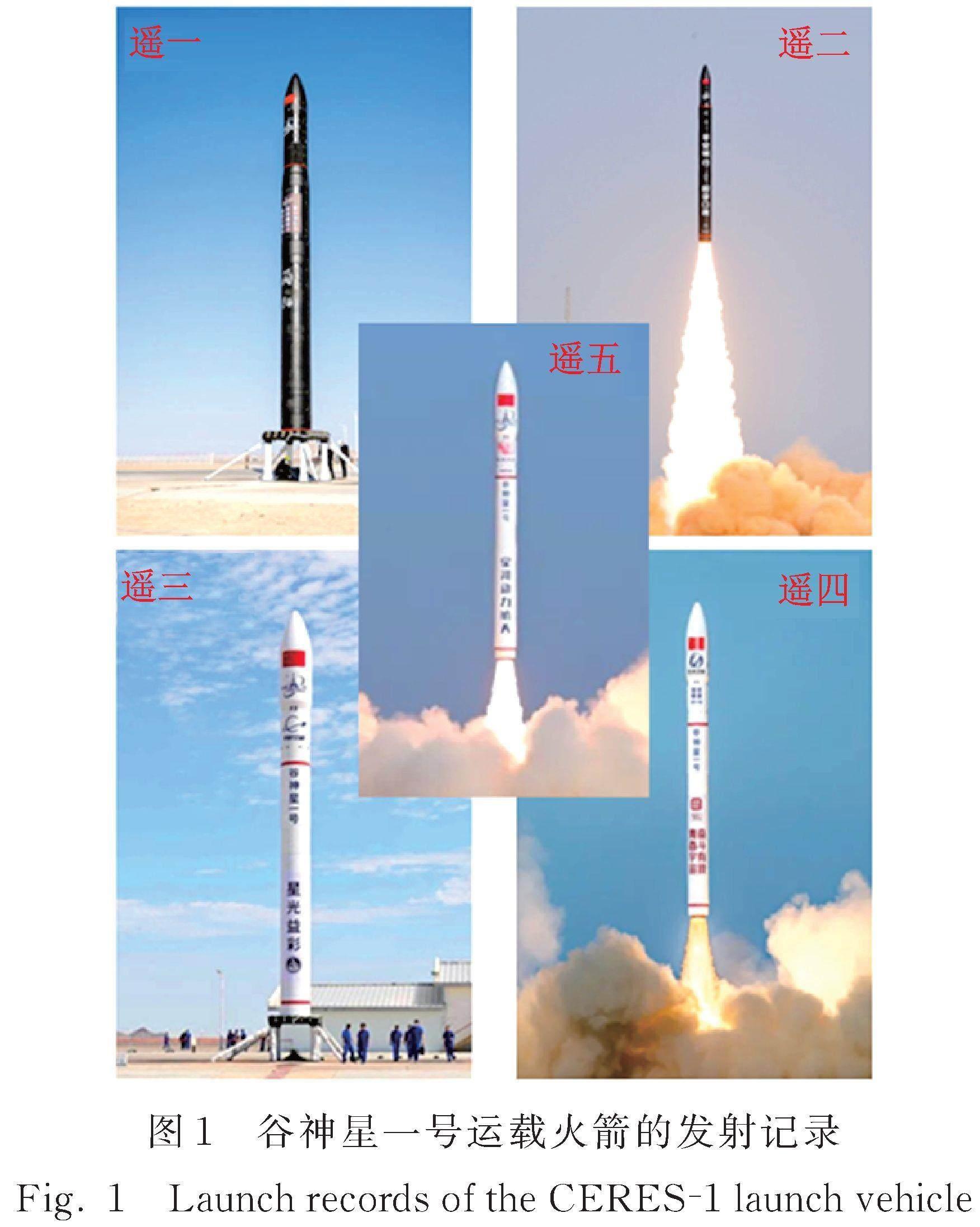
谷神星一號運載火箭是中國民營航天企業北京星河動力裝備科技有限公司自主研發的一款四級小型固體商業運載火箭,一、二、三級采用固體發動機,四級為液體上面級。該運載火箭直徑1.4 m,全長約20 m,起飛重量約33 t,500 km太陽同步軌道運載能力為300 kg,可滿足微小型衛星的專屬、共享、搭載等定制化發射需求。如圖1所示,谷神星一號運載火箭的發射記錄已有5次。
2020年11月7日,谷神星一號(遙一)運載火箭在酒泉衛星發射中心發射,成功將天啟星座十一星精確送入預定軌道。這是星河動力實施的首次發射任務,也是中國民營商業運載火箭首次進入500 km太陽同步軌道,是中國商業航天的一次重大突破。
2021年12月7日,谷神星一號(遙二)運載火箭成功發射,將搭載的5顆小衛星送入預定軌道,首次實現“一箭五星”。2022年8月和11月,谷神星一號(遙三、四)運載火箭接連發射兩次,將多顆衛星順利送入預定軌道。2023年1月9日,谷神星一號(遙五)運載火箭在酒泉衛星發射中心發射,再次將搭載的5顆衛星順利送入預定軌道。截至目前,該型火箭保持著100%的發射成功率,不斷刷新紀錄,正式進入快響應、高密度的規模化發射階段。
1.2 時變模態辨識問題
谷神星一號運載火箭為三級固體發動機加先進液體上面級,如圖2所示。其中,芯一級配備單臺固體發動機,海平面推力為60 t,燃燒時間為74 s;芯二級配備單臺固體發動機,推力為28 t,燃燒時間為70 s;芯三級配備單臺固體發動機,推力為8.8 t,燃燒時間為69 s。一、二級級間采用熱分離方式,分離時間短,二級飛行初始穩定性好。
發動機燃料快速消耗和級間分離會引起運載火箭自身質量分布的顯著變化,進而導致飛行狀態下運載火箭的模態參數(固有頻率、阻尼比、模態振型等)不斷變化。顯然,姿控等分系統的設計均需要根據運載火箭實時的模態參數進行調整,因此,能否準確快速獲取飛行狀態下運載火箭的時變模態,對各分系統設計至關重要。
隨著測試技術(數據采集與傳輸、傳感器布局優化等)水平、新型傳感器性能以及計算機處理能力的不斷提升,開展運載火箭飛行模態辨識所需的硬件條件已基本成熟,制約該技術走向實用化的主要障礙在于欠缺高效魯棒的辨識方法。除響應信號的非平穩性、辨識信息的低冗余度、短數據甚至實測數據不完整等一般性問題外,開展運載火箭飛行模態辨識的主要挑戰表現在以下三個方面[19]:
(1) 僅輸出。運載火箭在飛行狀態下才會表現出時變特性,而飛行狀態下作用在結構上的激勵難以觀測(如氣動載荷、發動機內部擾動等),施加可控可測的人工激勵難度較高。因此,解決運載火箭飛行模態辨識問題需要首先解決僅輸出辨識問題,即在激勵未知的情況下,僅基于響應數據獲取運載火箭的時變模態。
(2) 遞推。為實現在線監測與實時控制,需要對運載火箭的時變特性進行快速獲取,這就要求辨識方法具有可遞推性,即在采集得到當前時刻新數據后,只基于新數據所提供的信息去修改原來估計出的模態參數,而不是基于所有數據重新進行一輪模態參數估計。遞推辨識過程中每一步的計算量和所占用的內存空間較小,對計算機的處理能力和存儲空間要求較低,可保證數據處理過程跟得上數據采集過程。
(3) 復雜噪聲。由于激勵未知,從處理實測響應數據的難易程度來看,運載火箭真實的發射與運行工況遠比地面振動試驗更為惡劣,需要經歷復雜的噪聲環境。例如,當環境激勵較弱時,箭體結構彈性振動幅值較小,可能導致實測響應信號的信噪比較低,甚至淹沒在環境噪聲中。動量輪等姿控器件、發動機內部燃燒、液體晃動、旋轉部件等因素會產生諧波激勵,導致作用在箭體上的激勵為非白噪聲,基于有色噪聲激勵下的響應信號進行時變模態辨識常常會出現虛假模態。此外,當實測響應信號中含有脈沖噪聲等不滿足高斯分布的測量噪聲時,也會嚴重影響數據質量,甚至導致辨識結果失真。
綜上所述,發展運載火箭時變模態僅輸出遞推辨識方法,在同時滿足“僅輸出”和“遞推”的基礎上兼顧解決“復雜噪聲”問題,是運載火箭飛行模態辨識技術最終走向實用化的必經之路。
2 僅輸出遞推辨識方法
2.1 時變自回歸滑動平均模型
由于運載火箭自身顯著的時變特性,其響應信號具有非平穩性,時域信號隨時間的變化規律是運載火箭結構系統時變特性的最直接體現。相較于頻域辨識方法,時域辨識方法無需將非平穩的響應信號變換至頻域進行分析,可有效避免數據變換過程中的各類誤差[19]。此外,頻域辨識方法難以滿足遞推辨識需求,因此,目前常用的僅輸出遞推辨識方法主要基于狀態空間模型或時間序列模型發展而來[19,23]。本節主要介紹時間序列模型中的時變自回歸滑動平均(TARMA)模型,進而給出基于TARMA模型的僅輸出遞推辨識方法。
作為基于非平穩時間序列建立起來的離散模型,TARMA 模型既能反映時間序列自身數據結構及其變化規律,也能反映產生該時間序列的待辨識系統的固有特性。令na 和nc 分別表示自回歸和滑動平均階數,則TARMA 模型可寫為如下形式[19,23]:
式中 x [ t ] 表示維度為k 的離散非平穩響應信號;e [ t ] 表示均值為零、協方差為Σ [ t ] 的不相關殘差序列,即滿足正態獨立分布N ( 0,Σ [ t ] );Ai [ t ] 和Ci [ t ] 分別表示TARMA 模型的自回歸和滑動平均系數矩陣。
基于“時間凍結”假設,可得每一時刻TARMA模型的功率譜密度(Power Spectral Density,PSD)函數為[23?25]:
式中 ω 表示頻率,單位為rad s;Δt 為采樣間隔;j 為虛數單位;( ? ) H 表示矩陣的Hermitian 轉置。
每一時刻TARMA模型的模態參數可通過求解如下特征值問題獲得[23?24]:
( pi [ t ] I - A [ t ]) vi [ t ]= 0, i= 1,2,…,kna? ?(3)
式中 pi [ t ]和vi [ t ]=[ pi [ t ]-na LTi,…,pi [ t ]-1 LTi]T分別表示伴隨矩陣A [ t ] 的特征值和特征向量,其中Li 為模態振型向量;I 為單位矩陣。伴隨矩陣A [ t ]由自回歸系數矩陣構成,具體如下[23?24,26]:
更進一步,可得TARMA模型的固有頻率和阻尼比分別如下:
時間序列x [ t ] 的取值大小與先后順序反映了待辨識系統的固有特性,因此,TARMA 模型參數Ai [ t ],Ci [ t ] 和Σ [ t ] 中也蘊含了該系統固有特性的信息,這一過程可歸納為信息的凝聚性,即大量數據所蘊含的信息被凝聚為少數幾個模型參數[23]。顯然,在估計得到TARMA 模型參數后,即可基于上述過程獲取待辨識系統的模態參數。
在TARMA模型參數的估計過程中,自回歸和滑動平均階數會直接影響估計精度及其計算復雜度。對于TARMA模型參數的遞推估計過程,可根據殘差特性來選擇模型階數,即通過計算殘差平方和與序列平方和的比值來刻畫TARMA模型對信號的擬合誤差[23,27]。一般地,較高的模型階數能夠更好地對信號進行擬合,有助于減小擬合誤差,而較低的模型階數則意味著較低的計算復雜度和較好的計算效率。因此,模型階數的選擇過程往往需要在擬合精度與計算效率之間做折中。
2.2 辨識方法
將式(1)中的TARMA模型改寫為偽線性回歸形式[23?25],如下式所示:
x [ t ]= w [ t ]TΨ [ t ]+ e [ t ] (6)
其中參數矩陣w [ t ] 和回歸向量Ψ [ t ] 分別具有如下形式:
在TARMA 模型參數的估計過程中,需要對舊數據進行遺忘,降低舊數據對當前估計結果的影響,以有效跟蹤待辨識系統的時變特性。借助指數加權遺忘機制,引入遺忘因子λ(0 < λ ≤ 1)對時刻τ 下的數據進行加權(權值為λt - τ),以實現對舊數據的遺忘。定義指數加權最小二乘費用函數如下[23]:
式中表示Euclidean范數。
式(9)的解為:
式中 diag{ ? }表示以{ ? }中元素為對角元素的對角矩陣。
定義協方差矩陣P [ t ]如下:
則進一步可得:
P [ t ]-1 = λP [ t - 1 ]-1 + Ψ [ t ] Ψ [ t ]T (13)
根據矩陣逆定理,式(13)可改寫為:
將式(14)代入式(10)可得:
形式:
則式(15)中t 時刻參數矩陣的估計值w? [ t ] 可改寫為:
綜合式(14)~(19),可將指數加權遞推偽線性回歸TARMA模型參數估計方法[23]總結如下:
在估計得到參數矩陣后,基于式(2)可計算時變PSD 函數,基于式(3)~(5)可計算時變模態參數。需要說明的是,該方法的初始化條件為w? [ 0 ]T = 0和P [ 0 ]= αΙ,其中系數α 一般選取較大的正數,例如α= 104[ 23,27],旨在保證初始狀態時協方差矩陣足夠大。由于指數加權遺忘機制的引入,α 對估計結果的影響會隨著數據長度的增加而逐漸消失。一般地,對漸變系統進行辨識時通常選擇遺忘因子λ 為常數,對于突變系統則需選擇自適應的遺忘因子。
3 時變模態辨識結果
3.1 發射準備階段
本節基于谷神星一號運載火箭的慣性器件遙測數據進行時變模態辨識。選用運載火箭橫向和法向速度增量的遙測數據,開展基于多分量實測非平穩振動信號的數據快速處理與時變模態辨識。在點火發射前,運載火箭豎立于發射臺上,可近似視為懸臂梁邊界條件,由于發動機尚未點火,此時其模態參數應保持不變。為驗證該階段運載火箭的模態參數是否發生變化,在選擇TARMA 模型階數na = 20 和nc = 2 的情況下,進一步選取遺忘因子λ = 0.984,基于點火發射前90 s 內的遙測數據對運載火箭的固有頻率和PSD 函數進行辨識,獲取地面風載作用下運載火箭模態參數隨時間的變化規律。
發射準備階段固有頻率的辨識結果如圖3所示,其中,紅色圓點為固有頻率的辨識結果,綠色虛線為有限元模型計算得到的固有頻率參考值。由圖3可知,在發射前90 s內,運載火箭的前三階固有頻率基本保持不變,這與實際工況是一致的。發射準備階段PSD函數的辨識結果如圖4所示,顯然圖中脊線均呈現水平狀態,且與圖3中固有頻率的辨識結果完全對應,這也進一步表明該階段運載火箭的模態參數基本保持不變。需要說明的是,從發射前60 s開始,運載火箭的電爆閥、隔離閥等相繼開始工作,相應的起爆和開啟動作會引起較大的沖擊振動,因此圖4中相繼出現了多條豎直方向的高亮譜線,也導致了圖3中相對應時刻的固有頻率辨識結果較差。
將圖3中的固有頻率辨識結果與有限元計算結果進行對比,發現前兩階固有頻率吻合良好,但有限元計算出的第三階固有頻率值較辨識值偏高。前期相關研究已表明,基于Ares I?X和Vega火箭的有限元模型計算得到的固有頻率常常與其辨識值存在偏差[3?5],這也進一步說明了有限元模型與真實工作狀態下的運載火箭仍存在差異。因此,為更好地對谷神星一號運載火箭的結構動力學特性進行表征,尤其是對發射準備階段第三階模態進行表征,仍需要對其有限元模型進行修正,以提高模型精度。
3.2 飛行階段
如圖2所示,谷神星一號運載火箭芯一級所配備的固體發動機的燃燒時間為74 s。因此,基于運載火箭點火發射后0~74 s的遙測數據可對一級飛行階段的模態參數進行辨識。固有頻率及其對應PSD函數的辨識結果如圖5所示,其中,紅色圓點為固有頻率的辨識結果,背景色為PSD函數的辨識結果。由圖5可知,固有頻率的辨識結果與PSD函數的脊線吻合良好,清晰表明前四階固有頻率均隨燃料消耗而不斷升高,驗證了本文辨識方法對運載火箭時變模態進行跟蹤的有效性。需要說明的是,由于發射40 s之后第二階模態未被較好地激發出來,導致第二階固有頻率的辨識精度較差,但PSD函數的脊線依舊能夠刻畫出第二階固有頻率的大概變化規律。
此外,圖5中也給出了芯一級固體發動機滿載和空載情況下基于有限元模型計算得到的固有頻率參考值,分別對應實際飛行的0時刻和74 s時刻,在圖5中用黑色菱形表示。顯然,飛行模態的辨識結果和有限元計算結果吻合良好,說明本文辨識方法能夠對運載火箭的時變模態進行準確辨識。需要指出的是,在火箭發動機滿載和空載情況下進行有限元分析相對容易,但在有限元模型中考慮燃料消耗所導致的質量連續時變特性比較困難,難以獲取每一時刻下運載火箭的模態信息。因此,開展飛行模態辨識可有效彌補有限元分析的這一局限性,能夠連續獲取每一時刻下運載火箭的模態參數,為姿控系統設計和天地一致性研究提供重要支撐。
如圖2所示,谷神星一號運載火箭芯二級所配備的固體發動機的燃燒時間為70 s。因此,基于運載火箭點火發射后75~145 s的遙測數據可對二級飛行階段的模態參數進行辨識。固有頻率及其對應PSD函數的辨識結果如圖6所示。由圖6可知,固有頻率的辨識結果與PSD函數的脊線吻合良好,表明了前兩階固有頻率均隨燃料消耗而不斷升高的規律。與圖5中的辨識結果相比,圖6中模態辨識結果的精度相對較差,主要是由于二級飛行階段運載火箭的飛行速度更大,所處噪聲環境更為復雜,一定程度上增加了僅基于響應數據進行模態辨識的難度。此外,圖6中25~30 Hz頻帶內雖然模糊出現了PSD函數的脊線,但在辨識過程中通過篩除阻尼比過大的極點,該頻帶內并未出現大范圍的虛假模態。
類似地,圖6中也給出了芯二級固體發動機滿載和空載情況下基于有限元模型計算得到的固有頻率參考值,分別對應實際飛行的75 s時刻和145 s時刻。由圖6可知,飛行模態的辨識結果和有限元計算結果基本吻合,說明本文辨識方法依舊能夠對運載火箭二級飛行階段的時變模態進行跟蹤。
目前,通過有限元分析和地面振動試驗,一般在運載火箭發射之前就給定了其整個工作周期的模態特性,但兩者均難以連續獲取運載火箭的時變模態參數。有限元方法難以對連續時變結構系統進行仿真分析,只能對特定時刻(或特定燃料消耗情況)下的結構系統進行模擬。地面振動試驗無法避免進行多次重復試驗的繁瑣流程,往往采用秒時刻凍結進行多次時不變結構系統的模態試驗,再利用插值法獲取全過程的模態信息,費時費力。相較而言,借助時變模態辨識技術,充分利用天地試驗數據,可準確快速地獲取真實工作狀態下運載火箭的時變動力學特性,且滿足天地一致性要求,能夠有效服務運載火箭的有限元模型修正和姿控系統設計。
4 結? 論
本文系統性介紹了運載火箭時變模態辨識的研究意義和發展現狀,闡述了現階段開展時變模態辨識所面臨的難題與挑戰,發展了指數加權遞推偽線性回歸TARMA模型參數估計方法,能夠在激勵未知的情況下,僅基于響應數據快速辨識運載火箭的時變模態。在工程應用方面,圍繞谷神星一號運載火箭的時變模態辨識問題,基于上述辨識方法完成了飛行遙測數據的快速處理,準確辨識了發射準備階段和飛行階段的關鍵低階時變模態,有效服務了運載火箭的有限元模型修正和姿控系統設計。
參考文獻:
[1]????? 孟光, 周徐斌, 苗軍. 航天重大工程中的力學問題[J]. 力學進展, 2016, 46: 267-322.
MENG Guang, ZHOU Xubin, MIAO Jun. Mechanical problems in momentous projects of aerospace engineering[J]. Advances in Mechanics, 2016, 46: 267-322.
[2]????? 南宮自軍, 戴新進, 王亮, 等. 航天飛行器飛行模態辨識技術應用及展望[J]. 強度與環境, 2017, 44(1): 20-26.
NANGONG Zijun, DAI Xinjin, WANG Liang, et al. Application and prospective outlook of the aerospace vehicles operational mode identification[J]. Structure & Environment Engineering, 2017, 44(1): 20-26.
[3]????? 馬慶港, 王紫揚, 康杰, 等. 運載火箭結構工作模態參數辨識研究綜述[J]. 彈箭與制導學報, 2022, 42(1): 60-70.
MA Qinggang, WANG Ziyang, KANG Jie, et al. Overview of operational modal parameter identification for structures of rocket launchers[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2022, 42(1): 60-70.
[4]????? Bartkowicz T J, James G H. Ares I-X in-flight modal identification[C]. 52nd AIAA/ASME/ASCE/AHS/ASC Structare, Structural Dynamics and Materials Conference. Denver, Colorado, 2011.
[5]????? De Vivo A, Brutti C, Leofanti J L. Vega in-flight modal identification with the operational modal analysis technique[J]. Journal of Spacecraft and Rockets, 2014, 51(5): 1464-1473.
[6]????? 王亮, 張妍, 蔡毅鵬, 等. 特征時段選擇對飛行模態辨識結果的影響[J]. 噪聲與振動控制, 2017, 37(1): 128-131.
WANG Liang, ZHANG Yan, CAI Yipeng, et al. Influence of the measure feature phase selection on operational modal identification of aircrafts[J]. Noise and Vibration Control, 2017, 37(1): 128-131.
[7]????? Khoshnood A M, Roshanian J, Jafari A A, et al. Simultaneous estimation of two bending vibration frequencies for attitude control of a flexible launch vehicle[J]. Journal of Systems and Control Engineering, 2009, 223: 721-726.
[8]????? Jang J W, Hall R, Bedrossian N, et al. Ares-I bending filter design using a constrained optimization approach[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Honolulu, Hawaii, 2008: 6289.
[9]????? Tobbe P A, Matras A L, Wilson H E. Modeling and simulation of variable mass, flexible structures[C]//AIAA Modeling and Simulation Technologies Conference. Chicago, Illinois, 2009: 6023.
[10]??? Fransen S, Rixen D, Henriksen T, et al. On the operational modal analysis of solid rocket motors[C]//The 28th IMAC, International Modal Analysis Conference. Jacksonville, Florida, 2010: 453-463.
[11]??? Goursat M, D?hler M, Mevel L, et al. Crystal clear SSI for operational modal analysis of aerospace vehicles[C]//The 28th IMAC, International Modal Analysis Conference. Jacksonville, Florida, 2010: 1421-1430.
[12]??? Manzato S, Peeters B, Debille J. Tracking the evolution of modal properties of a solid propellant launcher during static firing test[C]//The 30th IMAC, International Modal Analysis Conference. Jacksonville, Florida, 2012: 559-570.
[13]??? James G H. Development of operational modal analysis techniques for launch data[J]. Advances in the Astronautical Sciences, 2013, 147: 209-230.
[14]??? James G, Kaouk M, Cao T. Progress in operational analysis of launch vehicles in nonstationary flight[C]//The 31st IMAC, International Modal Analysis Conference. Garden Grove, California, 2013: 59-75.
[15]??? 張家雄, 何詠梅, 張華山, 等. 基于PolyMAX法的飛行器工作模態分析技術與應用[J]. 航天器環境工程, 2015, 32(1): 28-33.
ZHANG Jiaxiong, HE Yongmei, ZHANG Huashan, et al. Operational modal analysis technology based on PolyMAX method and its applications for flying vehicles[J]. Spacecraft Environment Engineering, 2015, 32(1): 28-33.
[16]??? 王亮, 張妍, 周曉麗, 等. 基于ARMA-NExT和穩定圖方法的飛行器工作模態指示研究[J]. 動力學與控制學報, 2016, 14(3): 258-262.
WANG Liang, ZHANG Yan, ZHOU Xiaoli, et al. Study on the indication of the aircraft operational mode based on ARMA-NExT and stabilization diagram[J]. Journal of Dynamics and Control, 2016, 14(3): 258-262.
[17]??? 王亮, 蔡毅鵬, 朱辰, 等. 基于ARMA-NExT的飛行器工作模態辨識技術研究[J]. 導彈與航天運載技術, 2017(1): 18-21.
WANG Liang, CAI Yipeng, ZHU Chen, et al. Operational mode identification of the aircraft based on ARMA-NExT[J]. Missiles and Space Vehicles, 2017(1): 18-21.
[18]??? 董嚴, 付小燕, 丁志偉. 基于多測點數據的火箭飛行模態參數識別方法[J]. 固體火箭技術, 2018, 41(4): 520-523.
DONG Yan, FU Xiaoyan, DING Zhiwei. Rocket flight modal identification method based on data of multi-measure points[J]. Journal of Solid Rocket Technology, 2018, 41(4): 520-523.
[19]??? 馬志賽, 丁千, 劉莉, 等. 線性時變結構模態參數時域辨識方法的研究進展[J]. 機械工程學報, 2018, 54(23): 137-159.
MA Zhisai, DING Qian, LIU Li, et al. Research progress on time-domain modal parameter estimation methods for linear time-varying structures[J]. Journal of Mechanical Engineering, 2018, 54(23): 137-159.
[20]??? Ma Z S, Ding Q, Tang Y. Operational modal analysis of a liquid-filled cylindrical structure with decreasing filling mass by multivariate stochastic parameter evolution methods[J]. International Journal of Mechanical Sciences, 2020, 172: 105420.
[21]??? Ma Z S, Li L Q, Ding Q. Multivariate recursive bayesian linear regression and its applications to output-only identification of time-varying mechanical systems[J]. Journal of Vibration and Control, 2021, 27(11-12): 1395-1406.
[22]??? 余磊, 劉莉, 崔穎, 等. 一種運載火箭時變結構模態參數辨識的確定性演化方法[J]. 宇航學報, 2020, 41(4): 379-388.
YU Lei, LIU Li, CUI Ying, et al. A time-varying structure modal parameter estimation method in deterministic evolution for launch vehicle[J]. Journal of Astronautics, 2020, 41(4): 379-388.
[23]??? 馬志賽. 線性時變結構模態參數僅輸出遞推辨識方法研究[D]. 北京: 北京理工大學, 2017.
MA Zhisai. Output-only modal parameter recursive estimation for linear time-varying structures[D]. Beijing: Beijing Institute of Technology, 2017.
[24]??? Ma Z S, Liu L, Zhou S D, et al. Parametric output-only identification of time-varying structures using a kernel recursive extended least squares TARMA approach[J]. Mechanical Systems and Signal Processing, 2018, 98: 684-701.
[25]??? Ma Z S, Ding Q, Zhou S D. Novel adaptive methods for output-only recursive identification of time-varying systems subject to gross errors[J]. Journal of Vibration and Control, 2020, 26(5-6): 306-317.
[26]??? Bertha M, Golinval J C. Identification of non-stationary dynamical systems using multivariate ARMA models[J]. Mechanical Systems and Signal Processing, 2017, 88: 166-179.
[27]??? Spiridonakos M D, Fassois S D. Parametric identification of a time-varying structure based on vector vibration response measurements[J]. Mechanical Systems and Signal Processing, 2009, 23(6): 2029-2048.
Time-varying modal parameter estimation of the CERES-1 launch vehicle
Abstract: It is usually difficult to establish the dynamic model of a launch vehicle that accurately describes its time-varying characteristics. Therefore modal identification techniques are particularly necessary to obtain the time-varying dynamic characteristics of launch vehicles under flight conditions. Aiming at the problem of in-flight modal identification of launch vehicles, an output-only recursive identification method based on the time-dependent autoregressive moving average model is developed by using exponentially weighted mechanisms to track the time-varying characteristics. Without measuring the natural excitation forces, the proposed method can accurately and quickly identify the time-varying modal parameters of launch vehicles by exclusively using the measured response signals. Taking the CERES-1 launch vehicle as an example, time-varying modal parameters before liftoff and during the flight phase are accurately estimated by processing the flight telemetry data. Identification results are consistent with the variation of the finite element analysis results, demonstrating the high achievable accuracy of the proposed method. The proposed in-flight modal identification method can obtain the full-cycle modal information of launch vehicles, which meets the engineering requirements for the finite element model updating and attitude control system design.
Key words: launch vehicle; time-varying modal parameter; CERES-1; recursive identification
