不對行大蒜聯合收獲機設計與試驗
2024-06-17 09:58:54徐國棟李驊齊新丹傅杰一王永健孫新平
中國農機化學報 2024年6期
徐國棟 李驊 齊新丹 傅杰一 王永健 孫新平
摘要:現有大蒜聯合收獲機主要采用振動挖掘、對行夾持輸送、自動切莖方式,這種收獲方式要求大蒜種植時要對行播種,同時在收獲過程中機具要盡量對行直線行駛,否則極易因對行不準而發生漏收、堵塞等問題。針對這一情況,設計一款可不對行收獲的大蒜聯合收獲機。首先,基于不對行收獲的特點和大蒜收獲的農藝要求,進行整機總體設計;其次,通過建立數學模型完成滅茬機構設計和選型,建立運動學模型確定蒜秧切割機構和振動挖掘機構的運動參數;最后,以前進速度、入土傾角和挖掘深度為試驗因素,以損傷率和漏收率為主要評價指標,進行三因素三水平正交組合試驗并利用SPSS軟件進行方差分析。結果表明:當前進速度為0.35 m/s,入土傾角為20°,挖掘深度為100 mm時,不對行大蒜聯合收獲機性能最優,此時損傷率為2.91%、漏收率為3.93%。
關鍵詞:大蒜聯合收獲機;不對行;切秧機構;振動挖掘鏟;滅茬機構;正交試驗
中圖分類號:S225
文獻標識碼:A
文章編號:2095-5553 (2024) 06-0020-06
收稿日期:2022年11月25日
修回日期:2023年2月21日
*基金項目:江蘇省現代農機裝備與技術示范推廣項目(NJ2021—12)
第一作者:徐國棟,男,1998年生,江蘇鹽城人,碩士研究生;研究方向為智能種收裝備。E-mail: xgd15365763617@163.com
通訊作者:齊新丹,女,1971年生,山東德州人,碩士,副教授;研究方向為智能種收裝備。E-mail: xindanqi@njtech.edu.cn
Design and experiment of non-aligned garlic combined harvester
Xu Guodong1, 2, Li Hua2, 3, Qi Xindan1, Fu Jieyi2, 3, Wang Yongjian2, 3, Sun Xinping1, 2
(1. College of Mechanical and Power Engineering, Nanjing Tech University, Nanjing, 211816, China;
2. Key Laboratory of Intelligent Agricultural Equipment in Jiangsu Province/Nanjing Agricultural University,
Nanjing, 210031, China; 3. College of Engineering, Nanjing Agricultural University, Nanjing, 210031, China)
Abstract: ?The existing garlic combine harvester mainly uses vibration mining, on the line clamping transmission, automatic stem cutting methods, this harvest method requires garlic planting to the row of sowing, while in the harvest process to try to travel in a straight line, otherwise it is easy to occur leakage, blockage and other problems due to the non-aligned row. In view of this situation, this paper designs a garlic harvester which can be harvested without parallel. Firstly, based on the characteristics of misaligned harvest and the agronomic requirements of garlic harvest, the overall design of the whole machine was carried out. Secondly, the stubble elimination mechanism was designed and selected through the establishment of mathematical model, and the kinematic model was established to determine the motion parameters of the garlic vine cutting mechanism and vibration mining mechanism. Finally, with forward speed, dip Angle and excavation depth as the experimental factors and damage rate and leakage rate as the main evaluation indexes, the orthogonal combination test of three factors and three levels was carried out and the SPSS software was used for variance analysis. The results showed that the performance of the combined harvester was optimal when the forward speed was 0.35 m/s, the dip angle was 20° and the digging depth was 100 mm. At this time, the damage rate was 2.91% and the leakage rate was 3.93%.
Keywords: garlic combined harvester; non-aligned; seedling cutting mechanism; vibration digging shovel; stubble removal knife; orthogonal test
0 引言
大蒜是常見的農作物之一,廣泛種植在江蘇省大豐縣,邳州市以及山東,四川,云南新疆等地區。大蒜有很高的藥用價值,含有蛋白質,大蒜素和低聚糖等,對預防心血管疾病,抗腫瘤能夠起到一定的作用。大蒜的收獲時間主要集中在4—5月份,所以勞動強度大、收獲效率低和大蒜損傷嚴重已成為大蒜收獲亟待解決的關鍵問題。
大蒜收獲機按照收獲方式可分為分段式和聯合式[1]。分段式收獲機主要可以完成挖掘以及對大蒜的去土作業,但后續需要人力再進行撿拾、去須等工作,分段式收獲機工作效率高,能夠兼收土豆和胡蘿卜等根莖類作物,且該機型造價成本低,適合小型種植戶。聯合式收獲機能夠一次性完成對大蒜的挖掘、切莖、去土、輸送收集等任務[2, 3],自動化程度高,可以有效地幫助蒜農減少勞動量,改善勞動效率低的問題,但缺點是制造成本較高,適合中大型種植戶。
國外種植大蒜在播種的時候就能實現高度機械化,大蒜的行距相對固定,大多數以聯合收獲機為主。其中以法國的RECL大蒜聯合收獲機和RL3型打捆收獲機為代表,前者能夠一次性完成對大蒜的挖掘,切莖,夾持輸送,去土和收集,功能齊全,穩定性強。后者可實現大蒜的挖掘、夾持輸送和蒜秧的打捆,但后期仍需人工撿拾[1]。此類機型價格昂貴,且與我國種植規范不匹配,在實際推廣使用時存在較多問題。
目前,國內分段式的大蒜收獲方式已較為成熟,孫華等[4]通過對分段收獲機關鍵部件結構的優化設計及性能試驗,提高了收獲機的性能。在聯合收獲方面,于向濤等[5]研制了一臺4DLB-2型的半喂入自走式大蒜聯合收獲機,可一次完成挖掘、夾持輸送、去土、收集等功能,但后期需要人工對大蒜根須進行切除。
當前大蒜的聯合收獲均為對行收獲,要求大蒜播種時種植行直線度高、重播率低,否則極易出現漏收、堵塞等問題,影響收獲質量[6]。為此,本文設計一款可一次完成六行大蒜的切秧、挖掘、輸送、收集等工序的不對行大蒜聯合收獲機,確定其滅茬刀、挖掘鏟等關鍵部件的設計參數并通過試驗加以驗證,得到最優工作參數。
1 整機結構與工作原理
1.1 整機結構
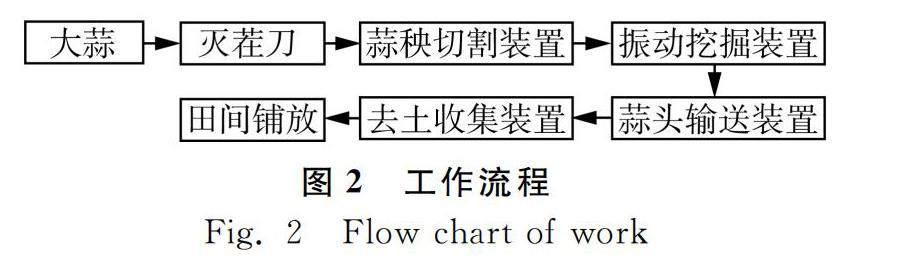
本文機具的設計結合徐州地區大蒜種植的農藝要求,在國內外研究基礎之上,確定不對行大蒜聯合收獲機的總體結構,如圖1所示。該收獲機主要由滅茬機構、蒜秧切割機構、振動挖掘機構、蒜頭輸送機構、去土收集機構、行走系統、動力系統等組成;動力由16.2 kW的發動機提供,經過兩組變速箱減速后分別將動力傳入行走系統和機具工作部件;液壓升降裝置設置在前輪處,通過液壓缸的抬升來調節挖掘鏟的入土深度;滅茬機構安裝在機具的最前方,然后是蒜秧切割機構;振動挖掘機構安裝于前輪的后方;蒜頭輸送機構在機具的中段;最后是去土收集機構。工作流程如圖2所示,主要技術參數如表1所示。
1.2 工作原理
不對行大蒜聯合收獲機的動力由一個16.2 kW的柴油發動機提供,通過帶輪和鏈輪的傳動實現機具的行走和工作部件的運動。機器以0.5 m/s的速度行進時,通過帶輪傳動,滅茬機構以2 000 r/min的轉速將頂部的蒜秧打碎,被打碎一截后的蒜秧隨后進入蒜秧切割機構,循環往復的割刀將剩余的蒜秧進一步切斷;通過液壓缸以及連桿調節好挖掘鏟的入土深度和入土傾角度后,振動挖掘機構將蒜頭底部的土壤進行切割和拋翻;后續蒜頭輸送機構上均勻分布的爪勺將蒜頭從土壤里帶出,可以完成蒜頭的運輸工作,也可在其輸送過程中實現初步去土;通過輸送機構后的大蒜落入去土收集機構,前后往復振動的去土柵可以將蒜頭上附著的土壤和蒜秧進一步抖落;最后蒜頭通過兩塊傾斜的匯集板集中掉落在收集袋中或田間,以便轉移至場地晾曬或直接進行田間晾曬。
2 關鍵部件設計
2.1 滅茬機構設計
滅茬機構結構如圖3所示,滅茬機構由軸管、軸頭和粉碎刀組成。軸管由Φ60 mm的鋼管制成,其上均勻的焊有多組刀座,刀座上用銷軸鉸接三把粉碎刀。其工作原理是:在機具前進時,高速旋轉的粉碎刀對地面的蒜秧進行粉碎,打碎后的蒜秧被拋送到田間,剩下的留茬平均高度小于90 mm。
2.1.1 粉碎刀設計
按照結構不同,粉碎刀分為錘爪型、甩刀型和直刀型三類,如圖4所示。錘爪型質量較大,可以產生較大的粉碎力,但消耗功率大,甩刀和直刀型體積小質量輕,雖然對韌性較高的莖稈粉碎效果不如錘爪型,但消耗功率小[7]。
為保證較好的粉碎效果,本文粉碎刀結構如圖5所示,采用65Mn鋼材制造的兩把Y型甩刀和一把直刀,三片刀片為一組,刀片間隔較小,排列較密。作業時有多個刀片同時參與切碎,粉碎效率高。
2.1.2 刀軸轉速確定
滅茬刀切碎方式屬于無支撐切割,這對動刀刀端的線速度要求較高[8]。研究表明[9],動刀刀端的線速度在30 m/s時才能起到良好的粉碎效果。本文滅茬刀旋轉半徑為150 mm,為達到30 m/s的線速要求,刀軸轉速應不低于1 910 r/min,所以滅茬刀刀軸的轉速最終設計采用2 000 r/min。
2.1.3 刀軸動平衡校核
刀軸與刀軸上均勻分布的粉碎刀構成一個多剛體的轉子,因其鉸接的連接方式,轉動慣量并不是常值。由于刀軸轉速較高,粉碎刀質量大,受到的離心慣性力也較大,作業時產生的偏擺很小且很快可恢復到動平衡位置[8]。因此,把粉碎刀和刀軸看成一個剛體后,粉碎刀在刀軸圓周方向的角度排列滿足式(1)、式(2),即可達到動平衡[10]。
sinθ1+sinθ2+…+sinθm=0(1)
cosθ1+cosθ2+…+cosθm=0(2)
式中: θ——刀座角度;
m——刀軸上刀座組數。
為滿足動平衡要求,本文設計的粉碎刀沿刀軸周向分布4組,每組間隔90°,軸向按等距離排列。
2.1.4 粉碎刀的合理排列密度
在機具前進速度與刀軸轉速相同的條件下,粉碎刀的數量有一個最優值,此時可以達到較好的粉碎效果,降低功耗,節約制造成本。刀的數量最優值一般由刀的密度C來確定[8],計算如式(3)所示。
C=N/L(3)
式中: N——粉碎刀數量;
L——機具作業幅寬,cm。
對于直刀式甩刀,刀片的排列密度一般為0.60~0.73片/cm;對于Y型甩刀一般為0.23~0.40片/cm[8]。本文采用兩片Y型中間夾一片直刀型的設計,排列密度取為0.60片/cm。
2.2 蒜秧切割機構設計
本文蒜秧切割機構采用一個往復式切割器,如圖6所示。切割時,護刃器尖端的護舌和定刀片構成對蒜秧的雙支撐,動刀在曲柄連桿的驅動下進行往復運動,完成對蒜秧的切割[11]。
2.2.1 動刀片設計
動刀片呈六邊形,由高頻等溫淬火后的65Mn鋼制成。刃片厚度為2~3 mm,每厘米刀刃上有6~7個齒。常見的齒紋分為3種:等深齒紋三角形斷面、梯形斷面、不等深齒紋變梯形斷面[12]。變梯形斷面齒強度相對較大,耐磨性好且不易崩斷,因此本文動刀片齒紋采用的是變梯形斷面齒。
2.2.2 割刀切割速度確定
本文往復式切割器是由曲柄連桿機構驅動,其運動可看作一近似的簡諧運動。動刀片刀刃上點的位移x、速度vx和加速度ax計算如式(4)~式(6)所示。
x=-rcosωt(4)
vx=rωsinωt=ωr2-x2(5)
ax=rω2cosωt=-ω2x(6)
式中: r——曲柄半徑,mm;
ω——曲柄旋轉的角速度,rad/s;
t——曲柄由極左點a開始轉過的時間,s。
切割器中動刀片與曲柄的參數如圖7所示,其中e為動刀片頂寬,S為刀片切割行程,b為動刀片底寬。當位移為0時,最大速度vxmax=ωr;當位移為±r時,速度為最小值0 m/s。
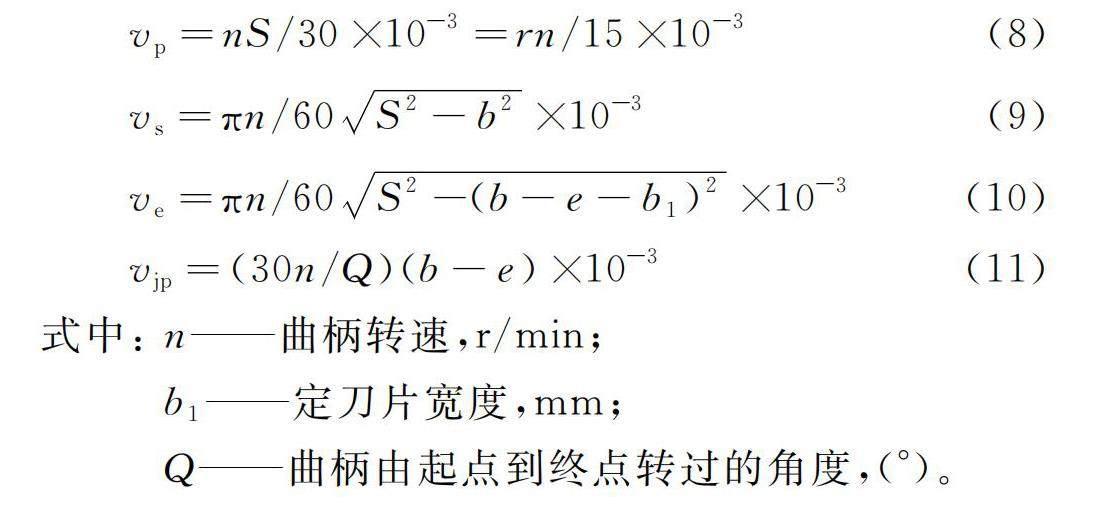
常用動刀片的平均速度vp表示切割速度。動刀的平均速度vp、始切速度vs、終切速度ve、平均剪切速度vjp[13]計算如式(8)~式(11)所示。
vp=nS/30×10-3=rn/15×10-3(8)
vs=πn/60S2-b2×10-3(9)
ve=πn/60S2-(b-e-b1)2×10-3(10)
vjp=(30n/Q)(b-e)×10-3(11)
式中: n——曲柄轉速,r/min;
b1——定刀片寬度,mm;
Q——曲柄由起點到終點轉過的角度,(°)。
本文割刀切割行程為76.2 mm,曲柄轉速為600 r/min,則割刀平均速度為1.52 m/s。
2.3 振動挖掘機構
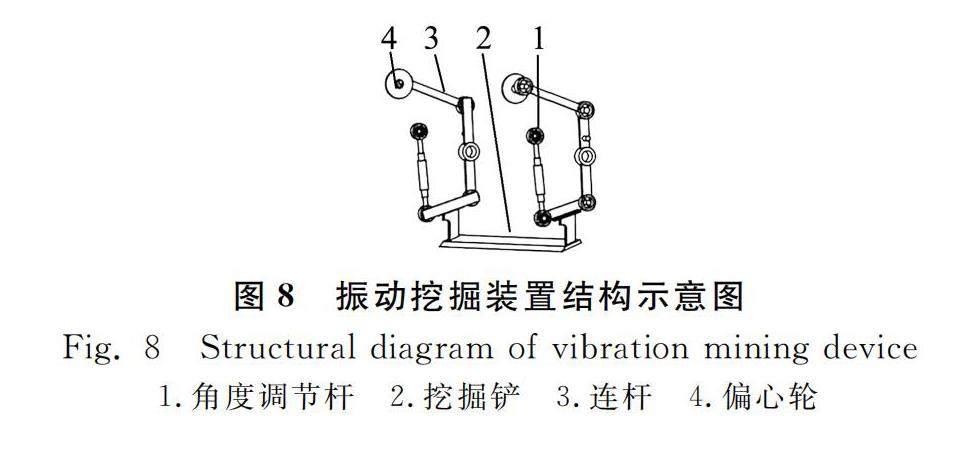
振動挖掘機構是不對行大蒜聯合收獲機的主要工作部件之一,由偏心輪,連桿、挖掘鏟、角度調節桿等組成,如圖8所示。挖掘裝置利用偏心連桿機構往復運動的特性實現挖掘鏟的前后振動,將大蒜和土壤挖起并喂入輸送機構。
2.3.1 挖掘鏟設計
為滿足如下的挖掘鏟設計要求:挖掘深度穩定并能根據要求調節;在挖出大蒜的同時盡可能少的挖取土壤;對于黏土挖掘鏟應有一定的碎土能力;挖掘鏟應具有自潔功能以避免出現纏草和壅土;挖掘鏟還應具備較好的耐磨性[14],本文設計的挖掘鏟剖面視圖如圖9所示,其中γ為挖掘鏟鏟刃傾角,α為挖掘鏟入土傾角。
2.3.2 挖掘鏟寬度
徐州地區大蒜種植行距一般為200~220 mm。考慮到大蒜種植行距、種植偏差,機具行進偏差等因素,本文挖掘鏟寬度B取為1 150 mm,可同時完成六行大蒜不對行收獲。
2.3.3 鏟刃傾角
要使挖掘鏟具備一定的自清潔作用,鏟刃傾角γ應滿足式(12)。
90°-γ>φ(12)
式中: φ——土壤與鏟的摩擦角,(°)。
研究表明[15],在入土傾角為20°左右時,γ一般取為40°~50°。如果要求挖掘出的溝底平坦,γ一般為70°。基于此,本文挖掘鏟鏟刃傾角取為50°。
2.3.4 入土傾角
挖掘鏟鏟面與土壤水平面所形成的夾角為入土傾角α。入土傾角過大,收獲機前進所受的阻力也會更大;入土傾角過小,會使得土壤破碎不易,同時挖掘鏟底面也會產生更大的磨損,降低其使用壽命。根據《農業機械設計手冊》[16]可知,在沙壤土中作業時,挖掘鏟的入土傾角α為14°~20°。當入土傾角α≥25°時,挖掘鏟表面會附著大量的土壤不易抖落,機具前進所受的阻力會隨著入土傾角增大而增大,能耗也變的更高。因此,挖掘鏟與土壤水平面之間的角度設計為15°~25°之間可調,默認初始為15°。
2.3.5 挖掘鏟運動分析
挖掘鏟工作時,由曲柄連桿機構驅動作往復運動,其工作過程分為向下切割土壤和向上拋翻土壤兩個階段[17]。如圖10所示,設挖掘鏟的前進速度為vm,沿振動方向的速度為vz,當挖掘鏟向下運動的時候,鏟的絕對速度為vj=vm+vz,此時為切割土壤階段。當鏟向上振動的絕對速度vj向上,此時為拋翻土壤階段。鏟的振動應滿足式(13)、式(14)[16]。
1.7K0<ω12rg<2.6K0(13)
K0=cosα/sinε(14)
式中: ω1——偏心輪旋轉的角速度,rad/s;
g——重力加速度;
ε——振動方向角,ε一般為10°~15°。
當曲柄半徑為26 mm時,偏心輪轉速為507 3 田間試驗 3.1 試驗方法 為得到不同工作參數對樣機的大蒜收獲效果影響規律,以前進速度、挖掘鏟入土傾角和挖掘深度3個因素[18]進行正交試驗;采用SPSS軟件對試驗數據進行分析,得出最優參數組合。 試驗在江蘇省徐州市碾莊鎮進行,該地區種植品種為徐州白蒜,蒜株高度為230~270 mm,蒜頭直徑為45~55 mm,鱗莖深度為0~80 mm,種植行距為180~220 mm。在土壤深度為80~100 mm處,土壤含水率為37.78%,土壤堅實度為0.07 kN/cm2。 試驗方法如下:將田塊分為3個測試區域,每個區域長度為10 m。在樣機試驗完成后人工挑選出受到損傷的大蒜、未成功切秧的大蒜以及漏收的大蒜,并分別稱重,根據它們在收獲總重中的占比得出試驗結果。本試驗為三因素三水平正交試驗,試驗因素和水平如表2所示。 3.2 試驗結果與分析 正交試驗結果如表3所示,將試驗數據導入SPSS軟件進行方差分析,結果如表4、表5所示。A、B、C為各因素編碼值。 由表4、表5可知,不對行大蒜收獲機的前進速度對損傷率和漏收率的影響極顯著,這是因為隨著前進速度的增大,收獲機蒜頭輸送裝置與前進速度不匹配,致使漏收率增大;入土傾角對損傷率的影響顯著,這是由于入土傾角過大,挖掘鏟容易與蒜頭發生觸碰,造成損傷率提高;挖掘深度對損傷率的影響顯著,對漏收率的影響不顯著,這是因為收獲機在工作時,挖掘鏟通過循環往復的運動將泥土進行拋翻,挖掘深度的變化會造成大蒜蒜頭的損傷,但對漏收率影響不大。對損傷率的影響程度大小順序為A、C、B,對漏收率的影響程度大小順序為A、B、C,綜合考慮最優方案為A-1B0C0,即前進速度為0.35 m/s,入土傾角為20°,挖掘深度為100 mm,此時損傷率為2.91%,漏收率為3.93%。 4 結論 1) 為解決大蒜的不對行收獲問題,根據收獲特點和種植的農藝要求設計一款不對行自走式大蒜聯合收獲機;并通過建立數學模型完成滅茬機構的設計和選型;建立運動學模型確定蒜秧切割機構和振動挖掘機構的運動參數;設計三因素三水平正交試驗,得到機具工作的最優參數。 2) 大蒜聯合收獲機采用16.2 kW的柴油發動機提供動力,工作幅寬為1 150 mm,可同時對6行大蒜進行不對行收獲,前進速度0.5 m/s。可一次實現對大蒜切秧、挖掘、輸送、去土、收集等功能。其中,滅茬刀軸轉速為2 000 r/min,粉碎刀排列密度為0.6片/cm,割刀平均速度為1.77 m/s,振動挖掘鏟偏心輪轉速為600 r/min。 3) 通過三因素三水平正交試驗,得出對損傷率的影響程度大小順序為前進速度、挖掘深度、入土傾角,對漏收率的影響程度大小順序為前進速度、入土傾角、挖掘深度,并得出不對行大蒜收獲機最優工作參數,即前進速度為0.35 m/s,入土傾角為20°,挖掘深度為100 mm,此時損傷率為2.91%,漏收率為3.93%。 參 考 文 獻 [1]李勝兵, 李驊, 齊新丹, 等. 大蒜收獲機研究現狀及展望[J]. 江西農業學報, 2020, 32(10): 99-104. Li Shengbing, Li Hua, Qi Xindan, et al. Research status and prospect of garlic harvester [J]. Acta Agriculturae Jiangxi, 2020, 32(10): 99-104. [2]侯進慧, 劉春雷. 我國大蒜資源深加工與產業化研究進展[J]. 生物資源, 2020, 42(1): 36-42. Hou Jinhui, Liu Chunlei. Research progress on deep processing and industrialization of garlic resources in China [J]. Biotic Resources, 2020, 42(1): 36-42. [3]張會娟, 胡志超, 吳峰, 等. 我國大蒜機械化種植與收獲概況[J]. 江蘇農業科學, 2010(3): 460-461. [4]孫華, 邱雷明. 分段式大蒜收獲機的設計[J]. 農業裝備與車輛工程, 2019, 57(5): 90-92. Sun Hua, Qiu Leiming. Design of sectional type garlic harvester [J]. Agricultural Equipment & Vehicle Engineering, 2019, 57(5): 90-92. [5]于向濤, 胡志超, 胡良龍, 等. 4DLB-2型大蒜聯合收獲機作業性能測試與分析[J]. 中國農業大學學報, 2013, 18(4): 183-187. Yu Xiangtao, Hu Zhichao, Hu Lianglong, et al. Working performance test and analysis on 4DLB-2 garlic combine harvester [J]. Journal of China Agricultural University, 2013, 18(4): 183-187. [6]胡志超, 吳峰, 王海鷗, 等. 國內外大蒜收獲機械現狀[J]. 農業機械, 2007(12): 47-49. [7]付雪高, 李明, 盧敬銘, 等. 秸稈粉碎還田機甩刀的研究進展[J]. 中國農機化, 2011(1): 83-87. Fu Xuegao, Li Ming, Lu Jingming, et al. Research on the cutter of straw crushing machine to field [J]. Chinese Agricultural Mechanization, 2011(1): 83-87. [8]章慧全. 玉米秸稈還田機械的設計[J]. 農業科技與裝備, 2011(12): 17-18. Zhang Huiquan. Research and design of returning cornstalks to fields machine [J]. Agricultural Science & Technology and Equipment, 2011(12): 17-18. [9]何進, 李洪文, 王慶杰, 等. 動力甩刀式小麥固定壟免耕播種機[J]. 農業機械學報, 2011, 42(10): 51-55. He Jin, Li Hongwen, Wang Qingjie, et al. Powered hammering blade no-till wheat seeder for permanent raised beds [J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(10): 51-55. [10]馮源. 玉米秸稈還田設備研制中幾個關鍵環節設計[J]. 農機使用與維修, 2016(3): 3-5. [11]杜翠紅. 穗莖兼收型玉米聯合收獲機立式割臺的理論分析與試驗研究[D]. 淄博: 山東理工大學, 2006. Du Cuihong. Theory and experimental study onthe vertical header of corn combine harvester for both ears and stalks [D]. Zibo: Shandong University of Technology, 2006. [12]黃濤. 往復式葡萄剪枝機的設計與試驗[D]. 烏魯木齊: 新疆農業大學, 2021. Huang Tao. Design and test of reciprocating grape pruning machine [D]. Urumqi: Xinjiang Agricultural University, 2021. [13]彭霞. 番茄收獲機割臺部分的設計及仿真研究[D]. 石河子: 石河子大學, 2009. Peng Xia. Study and simulation of the tomato harvesters cutting units [D]. Shihezi: Shihezi University, 2009. [14]劉成蓮. 4U-51型馬鈴薯收獲機關鍵部件的設計[J]. 當代農機, 2016(6): 76-79. [15]張海琨. 畦作洋蔥地膜回收設備的研究與試驗[J]. 新疆農機化, 2011(5): 30-32. [16]中國農業機械化科學研究院. 農業機械設計手冊[M]. 北京: 中國農業科學技術出版社, 2007. [17]徐永杰. 馬鈴薯聯合收獲機械原理方案設計[J]. 農業科技與信息, 2011(5): 55-57. [18]樊佳博, 李驊, 傅杰一, 等. 單行大蒜聯合收獲機的設計與試驗[J]. 江西農業學報, 2022, 34(3): 202-208. Fan Jiabo, Li Hua, Fu Jieyi, et al. Design and experiment of single-row garlic combine harvester [J]. Acta Agriculturae Jiangxi, 2022, 34(3): 202-208. DOI: 10.13733/j.jcam.issn.2095-5553.2024.06.005 王睿遠, 王佳虹, 晏毓, 等. 包覆式獼猴桃氣動無損采摘機構設計與試驗[J]. 中國農機化學報, 2024, 45(6): 26-31, 41 Wang Ruiyuan, Wang Jiahong, Yan Yu, et al. Design and experiment of pneumatic non-destructive picking mechanism for coated kiwi fruit [J]. Journal of Chinese Agricultural Mechanization, 2024, 45(6): 26-31, 41