基于雙路控制的農田精準噴藥處方優化試驗
2024-06-17 19:10:06趙浣旻李亞芹李志博劉兆光蒲巖巖邱新偉
中國農機化學報 2024年6期
趙浣旻 李亞芹 李志博 劉兆光 蒲巖巖 邱新偉
摘要:自精準農業技術開展以來,精準噴藥作為精準農業關鍵技術之一,是一直以來研究的重要問題。為進一步研究精準噴藥,提出基于雙路控制的分區寬度變量噴藥方法,并搭建農藥精準噴灑試驗臺,對比例電磁閥控制下噴頭的有效噴幅進行測量試驗。試驗發現,在PWM占空比大于60%時有效噴幅與理論值噴幅誤差小于20%,具有可參考性。試驗時,根據有效噴幅對噴藥處方圖的分區寬度進行選擇,以0.5 m、0.75 m、1 m作為試驗參數。根據選擇的參數設計以噴霧高度、移動速度、分區寬度為因素的正交試驗,得到回歸方程,并通過殘差分析檢驗模型的正確性。試驗得到參數優化區域為:噴霧高度1.5 m、行進速度0~0.5 m/s、分區寬度0.7~0.9 m。田間試驗發現,采取優化的分區寬度進行噴藥比常規噴藥方式節省23%的藥量,同時有效覆蓋率可達90.7%。
關鍵詞:精準噴藥;雙路控制;優化試驗;處方圖
中圖分類號:S2
文獻標識碼:A
文章編號:2095-5553 (2024) 06-0113-06
收稿日期:2022年12月5日
修回日期:2023年4月14日
*基金項目:黑龍江省教育廳基本科研業務費基礎研究項目(2020—KYYWF—0264)
第一作者:趙浣旻,男,1996年生,天津人,碩士研究生;研究方向為智能農業裝備。E-mail: 3031402865@qq.com
通訊作者:李亞芹,女,1978年生,黑龍江佳木斯人,博士,教授;研究方向為智能農業裝備。E-mail: 104006239@qq.com
Experimental on optimization of field precision spray prescription based on dual-way control
Zhao Huanmin1, Li Yaqin1, Li Zhibo2, Liu Zhaoguang1, Pu Yanyan1, Qiu Xinwei1
(1. Jiamusi University, Jiamusi, 154007, China; 2. Heilongjiang Provincial Research Institute of Agricultural Mechanical Engineering, Harbin, 150081, China)
Abstract: Since the development of precision agriculture technology, precision spraying, as one of the key technologies of precision agriculture, has been an important issue studied. In order to further study precision spraying, the partition width variable spraying method based on double way control was proposed, and the pesticide precision spraying test bench was set up to measure and test the effective nozzle under the proportional solenoid valve control. The test found that the error between the effective spray amplitude and theoretical value was less than 20%, when the PWM duty ratio was greater than 60%, which had reference value. During the test, the partition width of the spray prescription map was selected according to the effective spray amplitude, and 0.5m,0.75m and 1m were used as the test parameters. Orthogonal tests with spray height, travel speed, and partition width were designed from the selected parameters, and regression equations were obtained, and the correctness of the model was tested by residual analysis. The spray height was 1.5m, travel speed 0-0.5m/s and partition width 0.7-0.9m. Field experiments showed that spraying with optimized zone width saved 23% of the dosage compared with conventional spraying, while the effective coverage could reach 90.7%.
Keywords: precision spraying; dual-route control; optimization test; prescription diagram
0 引言
在農田噴藥的過程中,精準噴藥一直是人們研究的主要問題。傳統的噴藥方式占用大量的人力物力,同時還會導致農藥污染環境[1]。隨著科技的進步,無人機噴藥出現并逐步應用于大田噴藥的場景中。與傳統機器相比,無人機具有成本低、效率高、機動性強等優點[2],可以將勞動力成本降低一半[3, 4]。與其他噴藥方式相比,無人機在面對障礙物時具有更好的操作性[5]。無人機能提供高效、廣泛、便捷的作業,為快速高效殺滅病蟲害提供了更好的平臺[6]。但無人機噴藥也存在一定的問題,無人機進行作業時往往使用等量噴藥的方式,大部分參數都由無人機自有的參數決定,不能做到按需處理,對病蟲害的預防效率大大降低[7]。大霧量、雨淋式的噴藥方式,已遠不能適應現代農業和新農村建設的要求[8]。
閆春雨等[9]通過對圖像進行二值化、柵格化、重采樣等處理后,將圖像中的作物信息轉換成噴藥量,最終生成噴藥處方圖。尹東富等[10]利用機器視覺技術獲得雜草質心坐標及面積大小,經軟件處理后生成除草劑噴施處方圖。彭孝東等[11]提出了基于幅寬微變的航線歸整法路徑規劃方案。現階段對無人機噴藥的研究多為作業方法和路徑規劃,但對于能夠用于植保無人機精準作業的農田處方圖卻鮮有研究[12],導致無人機作業過程中多為定值藥量進行噴灑或根據無人機搭載噴頭的噴灑寬度進行簡單的區域劃分。以上兩種對目標地塊的劃分方式在噴藥過程中沒有做到精準,在面對農田復雜的藥量需求時,會造成藥量不足和藥量過多兩種情況出現。本研究對現有的農田劃分方式進行改進,提出基于雙路控制的精細劃分方式,對農田以更小區域單元進行作業。以無人機作業最小噴幅即單個噴頭的噴幅為基礎對目標地塊進行區域劃分,通過雙路控制實現對農田的精準噴藥。
1 變量噴藥控制試驗臺
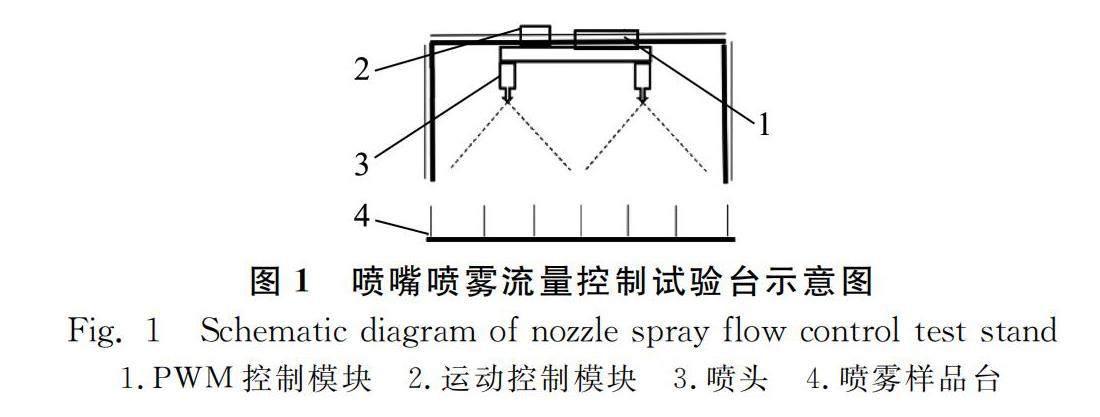
圖1為變量噴藥控制試驗臺。試驗臺供液系統由液體容器、水泵、流體輸送管、流量計組成。運動系統由步進電機、電機驅動器、調速器組成。試驗時采用立方形量杯、杯架、水敏紙和試紙夾組成的噴霧樣品臺,對霧滴的分布進行測量。由PWM電磁比例調節電磁閥及其驅動電路組成的噴霧變量控制模塊。由ATmega328為核心的電機驅動模塊,使用傳動帶和滑輪等組成傳動系統控制試驗臺移動,模擬無人機在噴藥過程中的動作、軌跡。
1.1 電磁閥比例調節閥
選用德國生產的電磁比例調節閥6023型。這是一種直接作用、雙向、常閉電磁閥,具體參數如表1所示。當斷電時,電磁比例閥會關閉。在供電時,根據控制電路輸出的PWM電信號的不同占空比對閥門開度進行連續調節和控制。為將噴嘴尖端與閥門緊密連接,采用一側為3/8NPT外螺紋、另一側為M18×1.5外螺紋的接頭。使閥門直接連接到噴嘴上,減小噴藥過程的誤差。
1.2 PWM信號控制電路
PWM指令信號經比例放大器進行功率放大,并按比例輸出電流給比例閥的比例電磁鐵,比例電磁鐵輸出力并按比例移動閥芯的位置,即可按比例控制液流的流量[13, 14]。采用AT89C52單片機作為控制模塊輸出PWM信號,使用定時器T0控制頻率,定時器T1控制占空比。通過P1.1和P1.2兩個引腳接入控制信息,進而控制占空比的增減。因為在AT89C52中沒有專門輸出PWM信號的引腳,因而使用任意輸出引腳作為PWM信號的輸出引腳,這里選擇P2.2作為輸出引腳。PWM控制電路如圖2所示。當按下開關K1時,占空比增加;當按下開關K2時,占空比減少。占空比控制調整的變化量由程序進行控制,在試驗過程中設定為5%。通過調節占空比控制電磁比例閥的開度,調節噴霧量。
1.3 電機驅動電路
通過A4988微驅動器驅動步進電機。在VMOT、GND引腳之間連接8~35 V電壓,同時并聯100μF的去耦電容器在瞬時電壓下保護驅動板。1A、1B、2A、2B引腳連接步進電機的兩組線圈。將STEP與DIR引腳與ATmega328的P3、P4引腳相連,用于控制步進電機的轉速與方向。
2 試驗條件與方法
2.1 試驗條件
電磁比例閥的驅動信號是占空比可在10%~100%之間連續可調的方波信號。通過對占空比的調節,可以得到不同的噴霧條件。由3個步進電機控制噴頭在平面內移動。通過旋鈕對步進電機的方向、轉速進行控制,可以模擬不同路徑的無人機行進條件。噴頭工作壓力為0.3 MPa。
2.2 試驗方法
由步進電機控制噴頭所在平臺的移動速度用于模擬無人機在作業過程中的移動,通過平臺的升降控制噴頭高度用于模擬無人機在作業過程中與作物之間的高度變化,通過PWM信號占空比的變化,控制噴藥量以及噴霧角度。
使用方形量杯與水敏紙進行藥量信息采集。至少一個量杯被裝滿時,記錄每個量杯中的量,每次測試重復三次,取平均值。使用水敏紙進行液滴覆蓋范圍數據采集,通過對水敏紙上的液滴占比計算,當占比小于50%時視為噴藥有效覆蓋面的邊緣。試驗過程中通過控制行進速度、噴頭高度和PWM信號占空比得到噴霧量和覆蓋范圍數據。其中行進速度分為三檔,噴霧高度分為三檔,PWM信號占空比自50%~90%分為五檔。
3 試驗過程與結果
3.1 PWM占空比優化試驗
在試驗過程中對噴頭的高度變量控制,設置1.2 m、1.4 m、1.6 m三種高度。通過重復試驗,對在不同占空比的PWM波控制下的噴藥寬度進行測量。試驗結果如表2所示。
通過Design-Expert軟件對數據進行分析,結果如表3所示。在信度為0.05下采用F檢驗,噴霧高度和PWM占空比對有效噴幅影響顯著。對數據進行擬合得到曲面方程式(1)。擬合曲面如圖3所示。
Z=-0.48+0.04A-1.49D-4.04A2+0.02AD+0.25D2(1)
式中: A——噴霧高度,m;
D——PWM信號占空比,%。
以噴頭的理論噴幅為基礎進行預測,實際噴幅的預期值在1 m左右。曲面在PWM占空比在50%~65%時,傾斜角度較大,實際噴幅的變化較大。在占空比為50%時,實際覆蓋寬度僅為0.5 m,但在占空比為60%時實際覆蓋寬度達到0.8 m,目標噴幅的誤差小于20%,可以滿足設計的最低要求。在占空比為65%~90%時,實際覆蓋寬度的變化較小,且滿足設計要求。根據實際情況下噴藥覆蓋率的要求,并結合擬合曲面發現,當噴霧高度為1.4m、1.6m,PWM信號占空比大于60%時,有效噴幅較好。
3.2 分區寬度優化試驗
通過ArcMap軟件生成隨機的地塊信息用于進行覆蓋效果試驗,如圖4所示。
采用了不同的分區寬度進行試驗,同時對噴頭的高度和移動速度進行控制。在試驗臺下方根據分區信息放置水敏紙,通過對水敏紙上的液滴分布情況計算霧滴的覆蓋率。通過流量計對區域內藥量進行統計。根據變量設計了三因素旋轉正交試驗,A為噴霧高度因素、B為移動速度因素、C為分區寬度。在該模擬地塊進行三次試驗,取均值作為最終結果,具體數據如表4所示。
通常這類試驗以噴霧流量或霧滴沉積密度作為指標,但該方法忽略了對目標的有效覆蓋面積。通過參考醫學上不同種類動物之間藥物劑量轉換因子的計算方式[15],試驗中設計了噴藥量與覆蓋面積的比值作為試驗指標。試驗發現,當兩者的比值在4~6時,噴藥效果較好。使用Design-Expert軟件數據進行分析,結果如表5所示。
以地塊一的試驗結果為例,對回歸方程中各項回歸系數在信度0.05下采用F檢驗,將不顯著項去除。發現交互作用AB、AC對指標影響不顯著,剔除后得到覆蓋率簡化回歸方程式(2)。
R=3.046+0.631A-1.745B+1.332C-0.767BC+0.693A2+0.460C2+0.471B2(2)
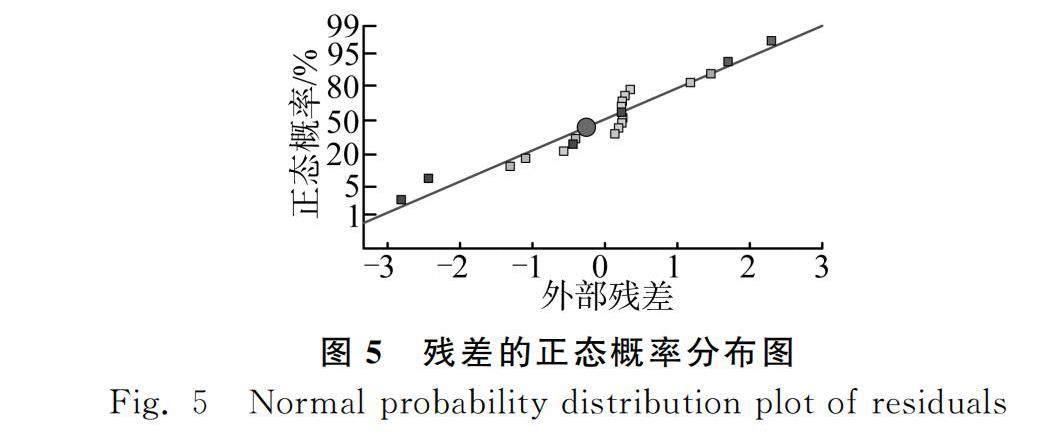
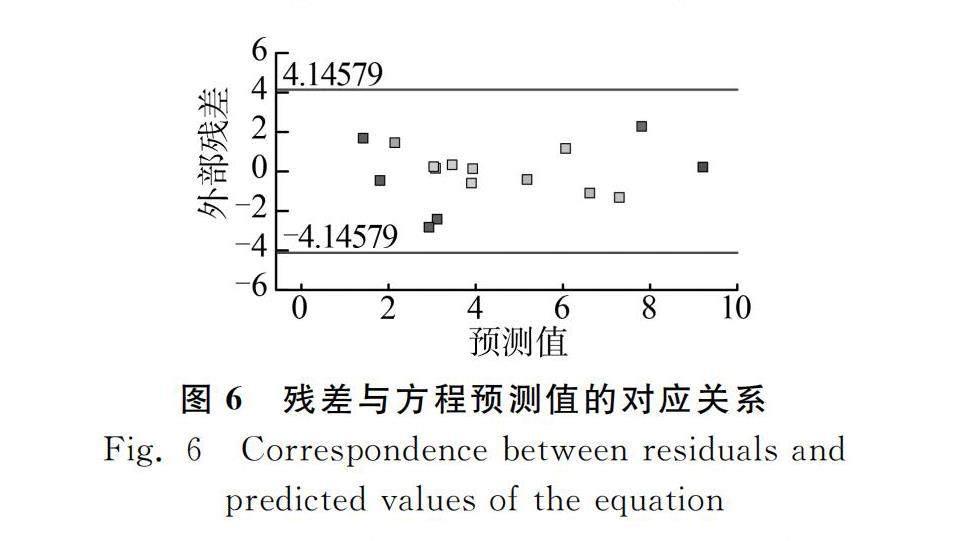
圖5為殘差的正態概率分布圖,可以看出,殘差值靠近直線,說明回歸模型擬合較好;圖6為殘差與方程預測值的對應關系,可以看出,分布特征不隨預測值的增加而發生改變,說明著數據方差齊性、獨立性條件符合。
通過回歸方程可得到響應曲面如圖7所示。
由圖7(a)可知,在噴霧高度不變時,隨著移動速度的增加,噴藥量與覆蓋面積的比值呈現下降趨勢;在移動速度一定時,噴藥量與覆蓋面積的比值隨著噴霧高度呈現先下降后上升的趨勢。由圖7(b)可知,在噴霧高度不變時,噴藥量與覆蓋面積的比值隨著分區寬度的增加呈現增加趨勢;在分區寬度不變時,噴藥量與覆蓋面積的比值隨著高度增加呈現先下降后上升的趨勢。由圖7(c)可知,在移動速度不變時,噴藥量與覆蓋面積的比值隨著分區寬度增加呈現上升的趨勢;在分區寬度不變時,噴藥量與覆蓋面積的比值隨著移動速度增加呈現上升趨勢。以各因素水平區間為約束條件,對參數進行優化。參數優化的最優結果為:噴霧高度1.5 m、移動速度0.4~0.5 m/s、分區寬度0.75~0.9 m。
4 田間試驗
2022年6月23—30日在樺川縣江川農場15隊17號地,進行了精準劃分變量噴藥試驗,目標地塊如圖9所示。試驗時設定噴霧高度1.5 m、移動速度0.5 m/s、分區寬度0.9 m。對目標農田進行區域劃分,以1 m×1 m區域為一個操作單元,共劃分24個單元。
對24個單元進行添加處方值,并通過Loaspace Viewer軟件進行定位獲取目標農田地理位置信息,將經度和緯度輸入Microsoft Excel中[16]。最終將地塊區域的地圖、坐標信息和處方值導入ArcMap軟件中生成處方圖,如圖9所示。處方圖主要包含三層信息,第一層是柵格信息,根據無人機的有效噴霧幅度和飛行速度而大小相等的矩形柵格;第二層是處方值信息層,根據專家決策獲得的網格劑量;第三級是地理信息層,主要是柵格行、列的經緯度信息。根據處方圖進行噴藥試驗,通過流量計采集藥量信息,通過水敏紙采集藥液的覆蓋率信息。使用選擇的參數進行噴藥試驗,通過Design-Expert軟件預測值為6.37 mL/m2、預計噴藥量為133 mL、預計覆蓋率為87.25%。試驗實際值為5.65 mL/m2、實際噴藥量為123 mL、實際覆蓋率為90.7%。通過對實驗室環境與實地作業環境對比分析發現,室內試驗并不能完全模擬在實際作業過程中的作業環境。室內試驗時并沒有考慮作物的葉片遮擋和環境中的橫向風等影響因素,導致預測值與實際值存在誤差。預測值與實際值之間的誤差為12.7%,驗證試驗結果在優化性能指標區間,表明優化結果是可信的。
使用常規噴藥方式[17-19]再進行噴藥試驗,得到噴藥量為160 mL、覆蓋率為90.7%、噴藥量與覆蓋面積的比值為7.35 mL/m2。優化參數噴藥試驗對比常規噴藥參數試驗結果相差30%,通過分析發現優化噴藥方式的噴藥量與常規噴藥方式覆蓋率相同,但節省了23%的噴藥量。
5 結論
為更精準噴藥,提出基于雙路控制的農田精準噴藥區域劃分方法,并進行以噴霧高度、移動速度和分區寬度為三因素、以農田噴藥量和覆蓋率為目標的正交試驗。同時進行優化區域的農田田間試驗,試驗時采用雙路控制的精準噴藥方法,并將該方法與常規噴藥方法進行對比。
1) 在PWM信號占空比小于50%時,噴頭的噴霧實際覆蓋寬度與理論寬度誤差大于38%,實際噴藥量與理論值誤差大于27%,無法滿足噴藥需求。因而,使用PWM對電磁比例閥進行控制時,應選擇占空比大于60%的PWM波。
2) 以噴霧高度、移動速度與分區寬度為影響因素,實施雙路控制的精準噴藥試驗。試驗結果表明,各因素對噴藥效果影響主次順序為行進速度、分區寬度、噴霧高度。最優的工作參數組合為:噴霧高度1.5 m、移動速度0.4~0.5 m/s、分區寬度0.75~0.9 m。通過回歸方程得到的預測值與實際值相差12.7%,驗證數學模型的可用性。
3) 進行優化區域參數的雙路控制精準噴藥田間試驗。試驗發現,采用優化的分區方式噴藥比常規噴藥方式可節省23%的藥量。采用優化的參數進行分區噴藥不僅減少單位噴藥量,同時噴藥精準度明顯提升,在降低生產成本的同時也減少對農田及周邊土壤的污染,對精準噴藥具有一定的指導意義,促進農業可持續發展。
參 考 文 獻
[1]陳佶, 劉偉華, 袁益明. 無人機霧化噴頭的使用現狀與發展趨勢[J]. 中國植保導刊, 2018, 38(3): 66-70.
Chen Ji, Liu Weihua, Yuan Yiming. Application and development trend of nozzles on UAV [J]. China Plant Protection, 2018, 38(3): 66-70.
[2]Huang Y, Hoffmann W C, Lan Y, et al. Development of a spray system for an unmanned aerial vehicle platform [J]. Applied Engineering in Agriculture, 2009, 25(6): 803-809.
[3]Umeda S, Yoshikawa N, Seo Y. Cost and workload assessment of agricultural drone sprayer: A case study of rice production in Japan [J]. Sustainability, 2022, 14(17): 10850.
[4]Seo Y, Umeda S. Evaluating farm management performance by the choice of pest-control sprayers in rice farming in Japan [J]. Sustainability, 2021, 13(5): 2618.
[5]Hassanein M, El-Sheimy N. An efficient weed detection procedure using low-cost UAV imagery system for precision agriculture applications [J]. International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences, 2018.
[6]華小梅, 江希流. 我國農藥環境污染與危害的特點及控制對策[J]. 環境科學研究, 2000(3): 40-43.
Hua Xiaomei, Jiang Xiliu. Characteristics and control countermeasures of pesticide pollution and its damage on environment in China [J]. Research of Environmental Sciences, 2000(3): 40-43.
[7]李會芳, 邱白晶, 劉保玲, 等. 對精確農業中變量噴霧控制的研究[J]. 中國農機化學報, 2004(3): 25-27.
Li Huifang, Qiu Baijing, Liu Baoling, et al. Study on the control of variable-rate spraying in precision agriculture [J]. Journal of Chinese Agricultural Mechanization, 2004(3): 25-27.
[8]龔艷. 高效植保機械化技術發展方向探討[J]. 農機科技推廣, 2008(11): 34-35.
[9]閆春雨, 黎文華, 蘭玉彬, 等. 基于無人機多光譜遙感的棉花脫葉效果監測及處方圖生成研究[J]. 南京農業大學學報, 2022, 45(4): 799-808.
Yan Chunyu, Li Wenhua, Lan Yubin, et al. Study on cotton defoliation effect monitoring and formulation map generation based on multi-spectral remote sensing of UAV [J]. Journal of Nanjing Agricultural University, 2022, 45(4): 799-808.
[10]尹東富, 陳樹人, 裴文超, 等. 基于處方圖的室內變量噴藥除草系統設計[J]. 農業工程學報, 2011, 27(4):131-135.
Yin Dongfu, Chen Shuren, Pei Wenchao, et al. Design of map-based indoor variable weed spraying system [J]. Transactions of the Chinese Society for Agricultural Engineering, 2011, 27(4): 131-135.
[11]彭孝東, 蘭玉彬, 胡潔, 等. 農用小型無人機轉彎掉頭模式及全區域覆蓋下作業路徑規劃與優化[J]. 華南農業大學學報, 2019, 40(2): 111-117.
Peng Xiaodong, Lan Yubin, Hu Jie, et al. Turning mode and whole region-coverage path planning and optimization of agricultural small UAV [J]. Journal of South China Agricultural University, 2019, 40(2): 111-117.
[12]闞平. 基于路徑規劃的多植保無人機協同精準作業方法研究[D]. 濟南: 山東大學, 2021.
Kan Ping. Cooperative and precise operation method of multi-sprayer-UAVs based on path planning [D]. Jinan: Shandong University, 2021.
[13]Wei D, Xiongkui H, Weimin D. Droplet size and spray pattern characteristics of PWM-based continuously variable spray [J]. International Journal of Agricultural and Biological Engineering, 2009, 2(1): 8-18.
[14]雷慧杰, 盧春華, 李正斌. 電力電子應用技術[M]. 重慶: 重慶大學出版社, 2017.
[15]徐貞, 史美祺. 抗腫瘤藥物的劑量選擇[J]. 中國臨床藥理學雜志, 2012, 28(5): 379-380.
[16]Wen S, Zhang Q, Deng J, et al. Design and experiment of a variable spray system for unmanned aerial vehicles based on PID and PWM control [J]. Applied Sciences, 2018, 8(12): 2482.
[17]胡章濤. 藥液量和飛防助劑對低空低(超低)容量噴霧施藥效果的影響[D]. 合肥: 安徽農業大學, 2020.
Hu Zhangtao. The effect of pesticide liquid volume and aircraft control additives on low-altitude low(Ultra-low) volume spray application [D]. Hefei: Anhui Agricultural University, 2020.
[18]張宋超, 薛新宇, 孫濤, 等. 植保無人飛機油菜雜草防治與效果評估研究[J]. 中國農機化學報, 2019, 40(9): 48-53, 59.
Zhang Songchao, Xue Xinyu, Sun Tao, et al. Study on weed control of plant protection UAV and effect evaluation in rape filed [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(9): 48-53, 59.
[19]金永奎, 薛新宇, 秦維彩, 等. 電動單旋翼植保無人機性能試驗[J]. 中國農機化學報, 2019, 40(3): 56-61.
Jin Yongkui, Xue Xinyu, Qin Weicai, et al. Performance test of electric powered single-rotor UAV for plant protection [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(3): 56-61.