基于閾值識別的溫室黃瓜整體自動落蔓裝置研究
2024-06-17 19:10:06郎秀丹史宇亮李天華陳明東
中國農機化學報 2024年6期
郎秀丹 史宇亮 李天華 陳明東


摘要:針對長季節黃瓜作物人工落蔓強度大、成本高和效率低等問題,設計一種基于冠層高度閾值識別的溫室黃瓜整體自動落蔓裝置。為保證黃瓜冠層特征提取的正確率,對8:00、12:00和18:00實時采集的黃瓜冠層圖像進行預處理,基于Otsu算法獲得平滑黃瓜冠層二值圖像。采用霍夫變換算法識別黃瓜冠層頂端繩束,并利用統計學方法歸納出感興趣區域中HSV色彩空間綠色部分各分量取值范圍,研究感興趣區域中綠色像素點占總像素點的比值變化規律。為防止黃瓜卷須纏繞秧蔓冠層頂端水平繩束,以黃瓜植株高度184~185 cm為落蔓控制目標,確定感興趣區域綠色像素占比的平均值0.162~0.182為整體落蔓裝置的落蔓閾值范圍。結果表明,植株高度184~185 cm和高于185 cm落蔓次數占總試驗次數比例分別為90%和10%。高于185 cm落蔓組中,最高植株距離頂端繩束(195 cm)的距離為9.2 cm,無黃瓜卷須纏繞黃瓜秧蔓冠層頂端水平繩束現象,采用感興趣區域綠色像素點占比確定黃瓜落蔓閾值方法,能夠滿足黃瓜生產實際要求。
關鍵詞:落蔓;圖像處理;黃瓜秧蔓冠層;霍夫變換;HSV色彩空間
中圖分類號:S224.3
文獻標識碼:A
文章編號:2095-5553 (2024) 06-0106-07
收稿日期:2022年12月30日
修回日期: 2023年2月17日
*基金項目:山東省農業重大應用技術創新項目(662/2318120)
第一作者:郎秀丹,女,1998年生,河北館陶人,碩士研究生;研究方向為設施機械與環境調控。E-mail: 3473917591@qq.com
通訊作者:陳明東,男,1978年生,吉林扶余人,博士,副教授;研究方向為設施機械與環境調控。E-mail: jlumingdong@126.com
Study on the integral automatic vine dropping device of cucumber in greenhouse
based on threshold recognition
Lang Xiudan1, Shi Yuliang2, Li Tianhua3, Chen Mingdong1
(1. College of Mechanical and Electrical Engineering, Qingdao Agricultural University, Qingdao, 266109, China;
2. College of Horticulture, Qingdao Agricultural University, Qingdao, 266109, China;
3. College of Mechanical and Engineering, Shandong Agricultural University, Taian, 271018, China)
Abstract: Aiming at the problems of high intensity, high cost and low efficiency of artificial falling vine of cucumber crops in long season, a greenhouse cucumber automatic falling vine device based on canopy height threshold recognition was designed. In order to ensure the accuracy of cucumber canopy feature extraction, cucumber canopy images collected at 8:00, 12:00 and 18:00 were preprocessed, and smooth cucumber canopy binary images were obtained based on Otsu algorithm. The Hough transform algorithm was used to identify the rope bundle at the top of cucumber canopy, and the value range of each component of the green part of HSV color space in the region of interest was summarized by statistical method, and the change rule of the ratio of green pixels to the total pixels in the region of interest was studied. In order to prevent cucumber tendrils from entangling the horizontal rope bundle at the top of vine canopy, cucumber plant height 184-185 cm was taken as the toppling control target, and the average proportion of green pixels in the region of interest was determined to be 0.162-0.182 as the toppling threshold range of the overall toppling device. The results showed that 90% and 10% of the total test times were from 184-185 cm and above 185 cm, respectively. In the group higher than 185 cm, the distance between the highest plant and the top rope bundle (195 cm) was 9.2 cm, and no cucumber tendrils were entangled in the horizontal rope bundle at the top of the canopy of yellow melon vine. The method of determining the threshold of cucumber vine by the proportion of green pixels in the region of interest could meet the actual requirements of cucumber production.
Keywords: dropping vine; image processing; cucumber vine canopy; Hough transform algorithm; HSV color space
0 引言
黃瓜是我國重要的蔬菜作物之一,目前黃瓜的溫室種植逐年增大[1]。黃瓜在溫室中主要是以繩子吊蔓的種植方式,黃瓜秧蔓攀附于繩子不斷升高,為了保證黃瓜在生長過程中維持正常的通風透光率,黃瓜秧蔓生長到一定高度后應進行落蔓,以保證其正常直立生長[2, 3]。
目前,溫室機械化程度較高的荷蘭、日本尚未解決黃瓜落蔓的機械化問題[4, 5]。隨著我國設施園藝的不斷發展,溫室落蔓裝置的研究已獲得一定的進展,例如彭嘉舜[6]研制了一壟兩行落蔓裝置,通過鏈條機構驅動繞線板實現秧蔓下降。山東農業大學提出了一種單株吊蔓高度可調的多壟落蔓裝置[7]。侯永等[8]采用圓形帶傳動吊蔓軸轉動放線落蔓方式與閉環鋼絲雙向拉動吊蔓軸疏蔓方式結合,通過吊蔓軸的水平移動和原位轉動實現自動落蔓疏蔓。上述落蔓器裝置傳動系統復雜、體積較大、遮光率高,尤其是智能化程度低,限制了推廣應用,目前黃瓜的落蔓仍以人工為主,工作效率低,成本高。因此,研究智能高效落蔓裝置已經成為當前亟待解決的問題。
近年來,隨著智慧農業的深入發展,機器視覺技術在農業領域得到了較好的應用[9]。Khan等[10]提出了一種黃瓜葉片病害檢測與分類方法,并進行了試驗驗證。Li等[11]提出了一種基于擴展協同表示的黃瓜葉片病蟲害分類識別模型。Kianat等[12]提出了一種基于特征融合和選擇技術的黃瓜病害分類框架,提高了黃瓜病蟲害的識別準確性。Tan等[13]比較了經典機器學習與深度學習方法在番茄病害分類問題上的分類性能,為病蟲害分類識別方法選取提供了參考。王志彬等[14]提出一種基于動態集成的作物葉部病害種類的識別方法,實現了黃瓜葉部病害種類的準確識別。趙春江等[15]提出一種基于級聯卷積神經網絡的番茄花期識別檢測方法,實現番茄花朵不同花期的精準辨識檢測。雷旺雄等[16]提出了一種基于分水嶺果梗圖像分割和最小角度約束的采摘點定位方法,為葡萄采摘機器人提供準確的采摘點坐標信息。劉麗娟等[17]利用改進的多通道全局閾值分割算法獲得蘋果目標二值圖像。為了實現復雜田間作業環境下病蟲害防治,大田農作物葉部病蟲害視覺識別方法的探索工作也取得了一定進展[18, 19]。將機器視覺技術應用于自動落蔓裝置的研究中,是目前實現落蔓裝置機械化和智能化的重要組成部分,對實現智慧農業具有重大意義。
針對黃瓜人工落蔓強度大、成本高等問題,本文設計一種基于冠層閾值識別的溫室黃瓜整體落蔓裝置,利用OpenCV識別黃瓜秧蔓冠層生長過程中的表型信息,結合黃瓜實際生產作業要求,確定黃瓜秧蔓冠層的落蔓閾值,以實現基于落蔓閾值控制的黃瓜自動整體落蔓。
1 黃瓜整體落蔓裝置結構原理
由于溫室內每行黃瓜種植方式相同,落蔓裝置中僅給出4行黃瓜秧蔓與落蔓裝置的傳動關系,結構如圖1所示。吊滑輪鋼絲兩端固定于溫室支撐結構,每株黃瓜的吊秧滑輪固定在吊滑輪鋼絲上,每株黃瓜秧蔓的吊秧繩繞過吊秧滑輪接至落蔓裝置主傳動軸,圖中右側虛線區域為每株作物通過吊秧滑輪接至繞繩器的放大圖。
為實現溫室黃瓜整體智能落蔓,在溫室黃瓜斜上方安裝工業攝像頭,采集黃瓜秧蔓冠層圖像,黃瓜植株冠層圖像識別信號傳送至樹莓派(Raspberry Pi),通過OpenCV視覺庫進行圖像處理,根據黃瓜長勢判斷是否落蔓,當作物需要落蔓時,樹莓派發送落蔓電動機啟動信號,電動機驅動行星減速機帶動主傳動軸旋轉,固定于主傳動軸上的繞繩器將吊秧繩釋放,實現溫室作物整體均勻落蔓。落蔓過程中,主傳動軸安裝的轉速扭矩傳感器實時監測落蔓裝置工作過程中轉速和扭矩變化,實現秧蔓下降速度閉環控制。
2 黃瓜整體落蔓裝置設計
整體落蔓裝置電動機軸系上的力矩平衡方程如式(1)所示。
J·dωdt=Te+Tz-Bpω-Tf(1)
式中: J——落蔓裝置主傳動軸總轉動慣量,kg·m2;
ω——電動機角速度,rad/s;
Te——電動機電磁轉矩,N·m;
Tz——落蔓裝置主傳動軸負載轉矩,N·m;
Bp——阻尼轉矩系數;
Tf——落蔓裝置主傳動軸摩擦阻力矩,N·m。
Tz=Nmgr(2)
式中: N——作物植株數量;
m——每個植株的平均重量,kg;
g——重力加速度,m/s2;
r——主傳動軸半徑,m。
實際黃瓜生產中,每個溫室內黃瓜種植行數較多,從式(1)可知,當黃瓜負載大于落蔓裝置系統摩擦阻力時,系統將處于發電狀態。由于黃瓜每次落蔓高度約為0.2m,發電量較小,且落蔓停止后,秧蔓側負載較大,落蔓裝置靜止需要較大鎖止轉矩。為了提高落蔓裝置穩定性,本設計采用配重平衡黃瓜秧蔓負載方法,即配重在落蔓裝置主傳動軸纏繞方向與秧蔓負載吊繩纏繞方向相反,落蔓裝置停車時,黃瓜負載與配重對主傳動軸產生的轉矩相平衡,即
式中: Tp——配重對主傳動軸產生的轉矩,N·m;
M——配重質量,kg;
Rz——配重盤半徑,m。
試驗溫室中種植了110株黃瓜,選取10株黃瓜秧蔓稱重后取平均值計算得到每株秧蔓平均重量為0.589kg,黃瓜負載的總質量為64.79 kg,因試驗溫室黃瓜種植規模不大,總負載較小,將配重吊繩直接纏繞于主傳動軸上,配重質量與黃瓜側總質量相等,配重質量為65kg。
落蔓裝置電動機轉速與黃瓜落蔓速度關系如式(4)所示。
V=60viπr(4)
式中: V——電機轉速,r/min;
v——秧蔓下降速度,m/s;
i——行星減速機傳動比,i=50。
采用配重平衡黃瓜秧蔓負載方法,落蔓裝置主傳動軸承受扭矩較小。主傳動軸選用DN25鋼管,外徑測量值為0.0334m,黃瓜秧蔓每次下降高度每次為0.2m,秧蔓下降速度為0.01m/s,電動機輸出轉速為286r/min。扭矩和轉速采用HCNJ-103型傳感器,靈敏度0.25%,信號采集時間間隔為200ms。
3 黃瓜落蔓識別閾值確定
3.1 黃瓜落蔓裝置頂端繩束識別
黃瓜整體落蔓裝置中,每株黃瓜秧蔓吊秧繩繞過吊秧滑輪纏繞主傳動軸的繞繩器上,所有吊秧繩通過吊秧滑輪后形成一根水平繩束。由于該繩束為黃瓜冠層生長的上邊界,所以需要對頂端繩束進行精準識別。頂端繩束識別流程如圖2所示。
因圖像在不同光線下亮度、飽和度等因素存在差異,連續一個月每天采集黃瓜生長視頻。使用OpenCV視頻分幀算法提取測試期間每天8:00,12:00和18:00的黃瓜植株的冠層圖像。采集圖像某一幀RGB圖像如圖2(a)所示。
為了提升識別的效率,使用二值化算法對日光溫室雜亂的背景進行處理。采用Otsu算法利用閾值將采集的溫室黃瓜冠層圖像背景與前景分割。隨機初始化一個閾值T,將黃瓜冠層和背景分為前景a和背景b,采集的溫室黃瓜冠層圖像背景和前景之間的類間方差θ表示如式(5)所示[20]。
θ=Pa1PaFa∑m,n∈af(m,n)-Qa2+
Pb1PbFb∑m,n∈af(m,n)-Qb2(5)
式中: Fa——溫室黃瓜冠層圖像前景像素點個數;
Fb——溫室黃瓜冠層圖像背景像素點個數;
Pa——采集的溫室黃瓜冠層圖像前景像素點個數占整幅圖像的像素點個數的比例;
Pb——采集的溫室黃瓜冠層圖像背景像素點個數占整幅圖像的像素點個數的比例;
Qa——采集的溫室黃瓜冠層圖像前景像素值占整幅圖像的像素值的比例;
Qb——采集的溫室黃瓜冠層圖像背景像素值占整幅圖像的像素值的比例。
其中Fa+Fb=1;f(m,n)表示圖像中坐標為(m,n)點像素點值;Q為整幅圖像總像素點個數的均值。最終,將0至255分別賦值給閾值T,Otsu算法自適應搜索到類間方差最大的閾值。二值化圖像如圖2(b)所示。
基于黃瓜秧蔓冠層的二值化圖像,采用Canny算法進行溫室黃瓜冠層圖像邊緣檢測。因Soble算子較小時邊緣檢測存在導數誤差偏大問題,本文采用Scharr算子減少導數誤差,設置卷積核大小為3×3,Scharr算子在x和y方向卷積核h和u如下。
Scharr算子計算黃瓜秧蔓冠層二值化圖像素點(i,j)在x和y方向卷積值Gx和Gy,如式(6)、式(7)所示。
像素點(i,j)處梯度的幅值G和梯度方向φ可表示為式(8)、式(9)。
G=Gx2+Gy2(8)
φ=arctanGxGy(9)
遍歷并計算溫室黃瓜冠層圖像每個像素點的梯度,具有相同梯度方向的像素點中梯度最大為邊界點。經過邊緣檢測的圖像如圖2(c)所示。
鑒于霍夫變換能夠利用圖像空間的點在參數空間有唯一方程的思想,基于邊緣檢測結果,通過點—線對偶性變換實現頂端繩束的識別。采用霍夫變換方法。在直角坐標系中,過點(x,y)的直線為[21]
y=kx+l(10)
式中: k——直線的斜率;
l——直線的截距。
l=-xk+y(11)
當k和l被作為變量時,-x和y則為變換后的直線斜率和截距,變換后的公式是k-l平面中的一條直線。為更好地識別頂端繩束,試驗測定了每行黃瓜植株頂端吊秧繩束與水平方向的夾角在-π12,π12之間。基于OpenCV視覺庫HoughLinesP()函數,識別采集的黃瓜秧蔓冠層圖像中指定行頂端繩束,黃瓜冠層頂端繩束直線的起點和終點坐標分別為(x1,y1)和(x2,y2)。另外,為便于黃瓜落蔓閾值確定過程中HSV分量均值提取,將二值化圖覆蓋于原圖,得到RGB色彩空間黃瓜秧蔓頂端繩束識別圖像如圖2(d)所示。
3.2 HSV分量均值提取和黃瓜落蔓閾值確定
3.2.1 HSV分量均值提取
由于RGB色彩空間不是直觀的顏色模型,H、S、V空間模型分別表示顏色的色調、飽和度、亮度,相比于RGB模型更符合人眼對事物的感知特性,消除了R、G、B分量間的相關性。為了確定黃瓜秧蔓冠層顏色的上下閾值范圍,將RGB色彩空間轉換為HSV色彩空間,H(Hue)表示色調,S(Saturation)表示飽和度,V(Value)表示亮度,其轉換公式如式(12)~式(14)所示。
H=60(G-B)max(R,G,B)-min(R,G,B)max(R,G,B)=R
120+60(B-R)max(R,G,B)-min(R,G,B)max(R,G,B)=G
240+60(R-G)max(R,G,B)-min(R,G,B)max(R,G,B)=B(12)
S=max(R,G,B)-min(R,G,B)max(R,G,B)max(R,G,B)≠0
0其他情況(13)
V=max(R,G,B)(14)
當計算結果H<0時,則需要進一步計算。
H=H+360(15)
黃瓜生長過程發現,當黃瓜秧蔓冠層頂部距離頂端水平繩束距離較近時,黃瓜秧蔓冠層頂部生長出來的黃瓜卷須很容易纏繞于秧蔓冠層頂端水平繩束,纏繞于頂端水平繩束的黃瓜秧蔓將出現無法降落和繞秧問題。為了防止黃瓜卷須纏繞秧蔓冠層頂端水平繩束,本研究設定黃瓜秧蔓冠層頂部距離黃瓜秧蔓冠層頂端水平繩束10 cm時進行落蔓,而試驗溫室黃瓜壟面距離黃瓜秧蔓冠層頂端水平繩束距離為195 cm。因此,黃瓜整體落蔓裝置落蔓時黃瓜植株高度應≤185 cm。根據黃瓜實際生產作業要求,黃瓜每次落蔓高度為0.2m,則植株落蔓后的植株高度為165 cm。因此,在圖2(a)中選取植株落蔓后高度165 cm至黃瓜秧蔓冠層頂端水平繩束高度195 cm之間采集的圖像作為感興趣區域(ROI區域)的高度,寬度為攝像頭采集圖像的寬度。
因一天中不同時間段的光照強度不同,所以同一張圖像的色調、飽和度、亮度也會有差異,為了更精確地確定整體落蔓裝置的落蔓閾值,分別采集早晨8:00,中午12:00,下午18:00各30張黃瓜秧蔓冠層圖像,遍歷每張圖像中綠色部分(植株葉子)H、S、V各個分量值,并分別取每種分量所有綠色像素值的平均值統計每個時間段植株的H、S、V分量值,由于圖像較多,本文從眾多圖像中隨機選擇一組HSV空間下相對應的ROI區域,如圖3所示,統計的8:00、12:00、18:00時,H、S、V分量值分布如圖4所示。
從圖4可知,8:00,12:00和18:00所采集的圖像中綠色像素點的H分量均分布在30~70之間。由于光照差異,S分量在8:00、12:00和18:00分別分布在100~160、50~100和140~180之間。V分量在8:00、12:00和18:00分別分布在100~160、160~200和60~100之間。
為了在提取綠色像素點時減少遺漏的情況,將閾值區間設定在各個分量的最大值與最小值之間,通過對不同時間段內植株ROI區域的處理后,確定H、S、V分量閾值分別為30~70、50~180和60~200。
3.2.2 黃瓜整體落蔓裝置落蔓閾值確定
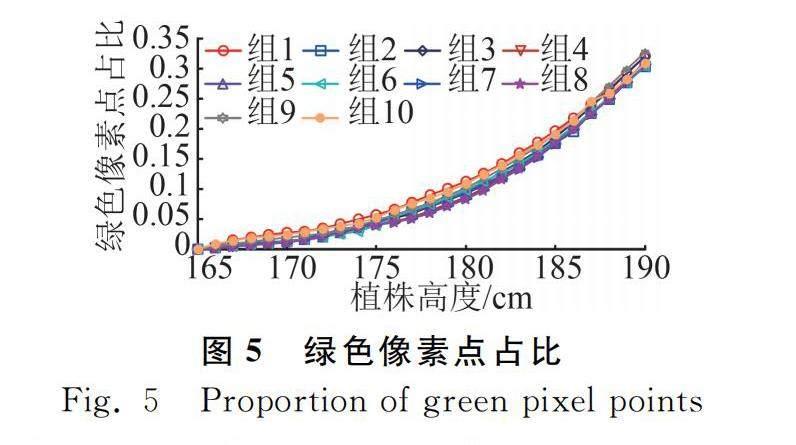
為了確定黃瓜整體落蔓裝置落蔓閾值,采集植株高度165~190cm之間的60張圖像,在所確定的H、S、V分量閾值范圍內遍歷ROI區域,計算此范圍內綠色像素點的個數占ROI區域總像素點的比值。為了便于觀察,本文隨機選出10張圖像綠色像素點占比結果如圖5所示。
從圖5可以看出,各組數據的變化趨勢基本一致,隨著植株高度的增加,ROI區域綠色像素點占總像素點的比值不斷增加。在選定的ROI區域內,植株生長高度超過180cm后,綠色像素點占比單調增長開始加快,這主要是因為黃瓜植株生長過程中,黃瓜植株頂部葉片較小,隨著植株的生長,植株底部較大葉片開始逐漸進入了選定ROI區域,綠色像素點開始單調快速增加。這表明采用ROI區域內綠色像素點的個數占總像素點的比值確定落蔓閾值是完全可行的。
為防止黃瓜卷須纏繞頂端水平繩束,本文在黃瓜秧蔓冠層頂部與黃瓜秧蔓冠層頂端水平繩束之間預留了10cm,即黃瓜秧蔓冠層植株高度應≤185cm落蔓時落蔓。考慮黃瓜各植株之間長勢可能存在差異,本文選取黃瓜植株生長高度為184~185cm時,ROI區域綠色像素占比的平均值0.162~0.182為整體落蔓裝置的落蔓閾值范圍。
4 結果與分析
為了驗證黃瓜落蔓閾值確定方法的正確率,基于整體黃瓜落蔓裝置工作原理,搭建黃瓜整體落蔓裝置如圖6所示。
通過樹莓派控制工業攝攝像頭拍攝黃瓜秧蔓冠層圖像,采用OpenCV計算采集圖像感興趣區域(ROI區域)內綠色像素點占總像素點的比值W,并與所確定的落蔓閾值范圍W0進行比較,比較后,樹莓派驅動I/O口,輸出高電平或低電平。當屬于確定的黃瓜落蔓閾值范圍時,輸出高電平,此工況電機啟動實現黃瓜落蔓,達到設定的落蔓時間后,樹莓派輸出低電平停止落蔓。基于冠層識別黃瓜整體落蔓裝置控制流程如圖7所示。
由于黃瓜的生長周期限制,為了保證試驗的準確性,驗證試驗時,每次試驗時,先將黃瓜秧蔓降落,然后再將落蔓裝置電機反向旋轉,實現秧蔓上升,模擬秧蔓冠層生長過程,電機控制速度為286r/min,樹莓派控制攝像頭拍攝速度為5幅/s。同時,樹莓派輸出端安裝繼電器,檢測繼電器的吸合狀態,即當達到黃瓜落蔓閾值時,繼電器將吸合,落蔓完成后繼電器將斷開。由于植株生長過程中秧蔓每天都會長大,每天做一次試驗,共做60次試驗,試驗統計結果如表1所示。
由表1可以看出,采用ROI區域綠色像素點占總像素點的比值確定黃瓜落蔓閾值,植株高度184~185cm和高于185cm落蔓次數占總試驗次數比例分別為90%和10%。另外,對高于185cm落蔓的6組試驗中最大和最小植株高度進行了測量,測量結果如表2所示。
6組中最高和最矮的植株高度分別為185.8cm和183.7cm。這表明,黃瓜植株之間的長勢差異對ROI區域綠色像素點占比有一定程度的影響。最高植株距離頂端繩束(195cm)的距離為9.2cm,由于本研究在黃瓜秧蔓冠層頂部與黃瓜秧蔓冠層頂端水平繩束之間預留了10cm,最高植株沒有出現黃瓜卷須纏繞黃瓜秧蔓冠層頂端水平繩束現象。因此,在黃瓜秧蔓冠層頂部與黃瓜秧蔓冠層頂端水平繩束之間預留防黃瓜卷須纏繞頂端繩束的距離,采用ROI區域綠色像素點占總像素點的比值確定黃瓜冠層閾值落蔓方法,能夠滿足黃瓜整體落蔓工程實際要求。
5 結論
1) 設計一種基于冠層高度閾值識別的溫室黃瓜整體落蔓裝置,可根據黃瓜長勢識別實現整體自動落蔓,有效提高黃瓜落蔓效率,降低黃瓜生產管理費用。
2) 采用霍夫變換對黃瓜落蔓裝置頂端繩束進行圖像識別,確定植株落蔓后高度165 cm至黃瓜秧蔓頂端水平繩束高度195 cm之間采集的圖像作為感興趣區域,根據感興趣區域綠色像素點占總像素點的比值變化規律,確定感興趣區綠色像素占比的平均值0.162~0.182為整體落蔓裝置的落蔓閾值范圍。
3) 溫室黃瓜整體落蔓裝置試驗結果表明,黃瓜植株高度184~185cm和高于185cm落蔓次數占總試驗次數比例分別為90%和10%。在黃瓜秧蔓頂部與黃瓜秧蔓頂端水平繩束之間預留防黃瓜卷須纏繞頂端繩束的距離,采用ROI區域綠色像素點占總像素點的比值確定黃瓜落蔓閾值落蔓方法,能夠滿足黃瓜生產實際要求。
參 考 文 獻
[1]李彩霞, 董邵云, 薄凱亮, 等. 黃瓜響應低溫脅迫的生理及分子機制研究進展[J]. 中國蔬菜, 2019(5): 17-24.
Li Caixia, Dong Shaoyun, Bo Kailiang, et al. Research progress in physiological and molecular mechanism of low temperature stress response in cucumber [J]. China Vegetables, 2019(5): 17-24.
[2]周長吉. 日光溫室高秧作物生產的吊蔓與放蔓技術[J]. 農業工程技術(溫室園藝), 2012(10): 24, 26, 28, 30.
[3]徐彥軍, 劉燕, 李偉, 等. 不同落蔓方法對大棚黃瓜農藝性狀的影響[J]. 長江蔬菜, 2017(10): 48-50.
Xu Yanjun, Liu Yan, Li Wei, et al. Effect of different reducing-vines methods on agronomic traits of greenhouse cucumber [J]. Journal of Changjiang Vegetables, 2017(10): 48-50.
[4]尹義蕾, 陳永生, 程瑞鋒, 等. 荷蘭設施園藝智能化生產技術裝備考察及啟示[J]. 農業工程技術, 2018, 38(34): 75-81.
[5]Yamanaka R, Kawashima H. Development of cooling techniques for small-scale protected horticulture in mountainous areas in Japan [J]. Japan Agricultural Research Quarterly, 2021, 55(2): 117-125.
[6]彭嘉舜. 溫室落蔓裝置設計與試驗研究[D]. 沈陽: 沈陽農業大學, 2018.
Peng Jiashun. Design and experimental study on releasing vine device for greenhouse [D]. Shenyang: Shenyang Agricultural University, 2018.
[7]苑進, 韓孝武, 劉雪美, 等. 一種單株吊蔓高度可調的多壟落蔓裝置[P]. 中國專利: CN211793215U, 2020-10-30.
[8]侯永, 李愷, 王春輝, 等. 溫室果菜自動落蔓與疏蔓裝置研制及應用[J]. 農業工程技術, 2021, 41(10): 50-53.
[9]趙春江. 智慧農業的發展現狀與未來展望[J]. 華南農業大學學報, 2021, 42(6): 1-7.
Zhao Chunjiang. Current situations and prospects of smart agriculture [J]. Journal of South China Agricultural University, 2021, 42(6): 1-7.
[10]Khan M A, Akram T, Sharif M, et al. An automated system for cucumber leaf diseased spot detection and classification using improved saliency method and deep features selection [J]. Multimedia Tools and Applications, 2020, 79: 18627-18656.
[11]Li Y, Luo Z, Wang F, et al. Hyperspectral leaf image-based cucumber disease recognition using the extended collaborative representation model [J]. Sensors, 2020, 20(14): 4045.
[12]Kianat J, Khan M A, Sharif M, et al. A joint framework of feature reduction and robust feature selection for cucumber leaf diseases recognition [J]. Optik, 2021, 240: 166566.
[13]Tan L, Lu J, Jiang H. Tomato leaf diseases classification based on leaf images: A comparison between classical machine learning and deep learning methods [J]. AgriEngineering, 2021, 3(3): 542-558.
[14]王志彬, 王開義,王書鋒, 等. 基于動態集成的黃瓜葉部病害識別方法[J]. 農業機械學報, 2017, 48(9): 46-52.
Wang Zhibin, Wang Kaiyi, Wang Shufeng, et al. Recognition method of cucumber leaf diseases with dynamic ensemble learning [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(9): 46-52.
[15]趙春江, 文朝武, 林森, 等. 基于級聯卷積神經網絡的番茄花期識別檢測方法[J]. 農業工程學報, 2020, 36(24): 143-152.
Zhao Chunjiang, Wen Chaowu, Lin Sen, et al. Tomato florescence recognition and detection method based on cascaded neural network [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(24): 143-152.
[16]雷旺雄, 盧軍. 葡萄采摘機器人采摘點的視覺定位[J]. 江蘇農業學報, 2020, 36(4): 1015-1021.
Lei Wangxiong, Lu Jun. Visual positioning method for picking point of grape picking robot [J]. Jiangsu Journal of Agricultural sciences, 2020, 36(4): 1015-1021.
[17]劉麗娟, 竇佩佩,王慧. 自然環境下重疊與遮擋蘋果圖像識別方法研究[J]. 中國農機化學報, 2021, 42(6): 174-181.
Liu Lijuan, Dou Peipei,Wang Hui, et al. Image recognition algorithm research of overlapped apple fruits in the natural environment [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(6): 174-181.
[18]葉中華, 趙明霞, 賈璐. 復雜背景農作物病害圖像識別研究[J]. 農業機械學報, 2021, 52(S1): 118-124, 147.
Ye Zhonghua, Zhao Mingxia,Jia Lu, et al. Image recognition of crop diseases in complex background [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(S1): 118-124, 147.
[19]黃林生, 羅耀武, 楊曉冬. 基于注意力機制和多尺度殘差網絡的農作物病害識別[J]. 農業機械學報, 2021, 52(10): 264-271.
Huang Linsheng, Luo Yaowu,Yang Xiaodong, et al. Crop disease recognition based on attention mechanism and multi-scale residual network [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(10): 264-271.
[20]Xiong L, Zhang D, Li K, et al. The extraction algorithm of color disease spot image based on Otsu and watershed [J]. Soft Computing, 2020, 24: 7253-7263.
[21]姜苗苗, 史國友, 許栓梅, 等. 基于自適應K均值聚類和霍夫變換的船舶干舷視覺檢測[J]. 上海海事大學學報, 2021, 42(2): 34-39.
Jang Miaomiao, Shi Guoyou, Xu Shuanmei, et al. Ship freeboard visual detection based on adaptive K-means clustering and Hough transform [J]. Journal of Shanghai Maritime University, 2021, 42(2): 34-39.