甘薯裸苗斜插式栽植機構及電控系統研制
2024-06-17 08:08:06徐亞雷楊紅光潘志國楊然兵李林張還
中國農機化學報 2024年6期
徐亞雷 楊紅光 潘志國 楊然兵 李林 張還

摘要:針對目前我國甘薯裸苗移栽機存在的栽植質量差和自動化程度低的問題,按照甘薯裸苗移栽的農藝要求,研制一種基于四連桿機構原理的甘薯裸苗斜插式栽植機構及其控制系統。通過理論分析和仿真模擬研究栽植機構的運動軌跡,確定栽植機構的關鍵結構參數,構建由直流無刷電機、旋轉編碼器和PLC控制器等組成的栽植機構電控系統。田間試驗表明:在目標株距20cm、作業速度0.4~0.6km/h時,移栽作業質量指標均達到標準要求,其中作業速度為0.4km/h時,作業性能優于0.5km/h和0.6km/h,此速度下株距變異系數均值為6.71%、栽植角度與深度合格率平均值分別為94.3%、95.0%。對比試驗結果表明,0.4km/h、0.5km/h和0.6km/h速度下,電驅控制與傳統機械控制相比,栽植株距變異系數平均值分別降低6.25%、6.37%和6.19%,可有效解決拖拉機動力輸出軸驅動不穩定性對栽植作業軌跡和株距的影響。
關鍵詞:甘薯;裸苗移栽;斜栽式;栽植軌跡;電控系統;四連桿機構
中圖分類號:S223.93
文獻標識碼:A
文章編號:2095-5553 (2024) 06-0053-06
收稿日期:2022年11月1日
修回日期: 2023年4月18日
*基金項目:山東省農業重大應用技術創新項目(SD2019NJ009);青島農業大學高層次人才科研基金(1116002)
第一作者:徐亞雷,男,1996年生,山東棗莊人,碩士研究生;研究方向為農業機械與裝備。E-mail: yalei0109@163.com
通訊作者:張還,男,1974年生,濟南人,博士,副教授;研究方向為智能農業機械與裝備。E-mail: huan0804@163.com
Development of oblique-planting mechanism for sweet potato seedlings
and its electric control system
Xu Yalei1, Yang Hongguang2, Pan Zhiguo1, Yang Ranbing1, 3, Li Lin1, Zhang Huan1
(1. College of Mechanical and Electrical Engineering, Qingdao Agricultural University, Qingdao, 266109, China;
2. Nanjing Institute of Agricultural Mechanization, Ministry of Agriculture and Rural Affairs, Nanjing,
210014, China; 3. College of Mechanical and Electrical Engineering, Hainan University, Haikou, 570228, China)
Abstract: Naked seedling transplanting is the main way of sweet potato cultivation, and planting operation is the key link of transplanting. Aiming at the problems of poor planting quality and low automation in planting machine of naked sweet potato seedlings in our country, according to the agronomic requirements for planting naked sweet potato seedlings in this study, a kind of oblique planting mechanism of naked sweet potato seedlings and its control system were developed based on the principle of four-link mechanism. The movement trajectory of the planting mechanism was studied by theoretical analysis and simulation, and the key structural parameters of the planting mechanism were determined. An electric control system of planting mechanism was constructed, which consisted of brushless DC motor, rotary encoder and PLC controller. Field experiments showed that when the target plant distance was 20 cm and the operating speed was 0.4-0.6 km/h, the operation quality index of transplanting reached the standard requirements. When the operating speed was 0.4 km/h, the operating performance was better than that of 0.5 km/h and 0.6 km/h. At this speed, the average coefficient of variation of plant distance was 6.71%, and the average passing rate of planting angle and depth were 94.3% and 95.0%, respectively. The comparative test results showed that compared with the traditional mechanical control, the electric drive control at 0.4 km/h, 0.5 km/h and 0.6 km/h speeds reduced the average coefficient of variation of plant distance by 6.25%, 6.37% and 6.19%, respectively, which could effectively solve the influence of the driving instability of the tractor power output shaft on the planting operation trajectory and plant distance.
Keywords: sweet potato; seedling transplanting; oblique-planting; planting track; electric control system; four-bar linkage
0 引言
甘薯作為一種重要的農產品和工業原料,在我國得到廣泛的種植。由于甘薯屬于異花授粉作物,有性繁殖過程復雜且產量低,而甘薯的營養器官具有較強的再生能力,因此在實際生產中用種薯培育甘薯秧苗,經剪苗后再通過裸苗移栽的方式得到廣泛采用[1, 2]。
目前,國內外學者對甘薯裸苗移栽進行了研究。Yan等[3]設計了一種適用于甘薯平插種植農藝要求的裸苗移栽機。Liu等[4]設計了一種適用于甘薯船底型種植農藝要求的裸苗栽植機構。劉正鐸等人設計了一種基于機械臂與深度學習的甘薯移栽機,可在移栽時出現漏苗現象時進行補栽作業。胡良龍等[5]設計了一種利用地輪驅動的鏈夾式甘薯移栽機,可實現斜插種植的軌跡要求,但需要更換齒輪改變傳動比調節移栽株距。申屠留芳等[6]研究了指夾式栽植機構,并對關鍵部件的運動進行了軌跡仿真。另外日本研制的小型自走式甘薯移栽機,適用于需要膜上移栽的丘陵地區,但造價昂貴且作業效率不高。總體而言國內適用于甘薯斜插種植的機械仍然較少,且栽植機構也主要利用地輪或拖拉機輸出軸驅動,存在地輪滑移和拖拉機輸出軸轉速與作業速度不匹配的問題,栽植質量無法得到有效保障。
為解決目前甘薯移栽機栽植質量差,主要栽植方式短缺的問題,基于四連桿機構原理設計斜插式甘薯裸苗栽植機構,可以較好完成甘薯苗斜插種植農藝要求,并利用電驅裝置控制移栽作業,從而保持較高的移栽株距穩定性與栽植質量,以期為甘薯機械化種植與自能化發展奠定基礎。
1 甘薯裸苗移栽方法及斜插式農藝要求
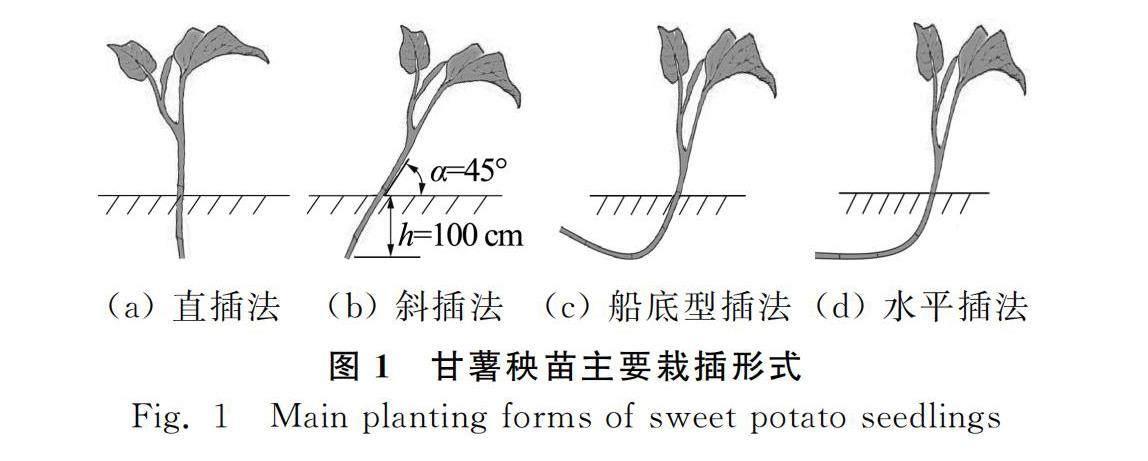
甘薯移栽工序復雜、農藝要求高。如圖1所示,甘薯裸苗栽植方式主要有直插式、斜插式、船底型和水平栽插式。其中,斜插式有利于抗旱增產,是目前使用較多的一種甘薯裸苗移栽方式[7]。
如圖1(b)所示,斜插法移栽是將甘薯苗傾斜插入土中,根據T/CAAMM 52—2020《甘薯復式栽植機》團體標準,斜插式主要農藝要求是栽植入土深度為10cm左右,薯苗斜度為45°左右(即是合格的“斜插法”)
2 甘薯裸苗斜插式栽植機構設計與軌跡分析
為實現斜插式栽植軌跡,如圖2所示設計的栽植機構由夾取桿、受拉彈簧、凸輪、曲柄、搖桿、連桿等部分組成。曲柄、搖桿、連桿通過鉸接的方式固定在機架板上構成四連桿機構,循環往復運動實現斜插種植軌跡要求。滾動軸承在凸輪上周向滾動,通過支點、彈簧、嚙合殘齒輪控制夾取桿的開合夾取甘薯秧苗。滾動軸承在凸輪上周向轉動一圈,夾取手完成一個周期移栽動作。
栽植機構夾取爪尖的運動軌跡決定甘薯苗在壟體中的栽植形狀。為實現斜插形移栽,栽植機構爪尖入土后的運動軌跡需傾斜向下。由于機具隨拖拉機向前運動,因此栽植運動軌跡由機具的前進運動和夾取爪的回轉運動合成[8],當機具在前進時,栽植機構各部分的運動軌跡如圖3所示。
假設圖3中桿件L1、L2、L3、L5長度和C點坐標(xc,yc)以及角度θ、φ1、φ2為已知量。
圖3只為說明夾取爪尖端運動軌跡(夾苗點距夾取爪尖端的距離忽略不計,即夾取爪尖端運動軌跡即為甘薯苗栽插軌跡),因此將夾取機構簡化為AE桿簡要說明,可建立矢量方程
OA+AB=OC+CB
OE=OA+AE(1)
由式(1)建立夾苗點E點的位移方程
xA+L2cosφ2=xC+L3cosφ3
yA+L2sinφ2=yC+L3sinφ3(2)
xE=xA+L5cos(φ2+θ)
yE=yA+L5sin(φ2+θ)(3)
其中A點坐標
xA=L1cosφ1
yA=L1sinφ1(4)
求解位移方程
tanβ=yA-yCxA-xC(5)
在三角形ABC中,∠ACB=β-φ3,則
cos(β-φ3)=(xA-xC)2+(yA-yC)2+L23-L222L3(xA-xC)2+(yA-yC)2(6)
sinφ2=yC+L3sinφ3-yAL2(7)
綜上可得φ2、φ3、xE、yE。
根據式(2)、式(3)對時間求導建立速度方程
xA′-L2φ2′sinφ2=0-L3φ3′sinφ3
yA′+L2φ2′cosφ2=0+L3φ3′cosφ3(8)
xE′=xA′-L5φ2′sin(φ2+θ)
yE′=yA′-L5φ2′cos(φ2+θ)(9)
xA′=-L1φ1′sinφ1
yA′=L1φ1′cosφ1(10)
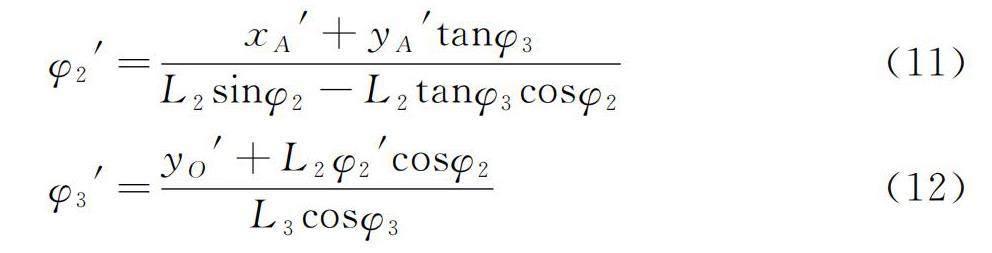
求解速度方程
φ2′=xA′+yA′tanφ3L2sinφ2-L2tanφ3cosφ2(11)
φ3′=yO′+L2φ2′cosφ2L3cosφ3(12)
綜合式(8)~式(12)可求得xE′、yE′。
通過分析可知,栽植機構曲柄OA、連桿AB、搖桿BC和機架板OC長度以及連桿AB與夾取爪AE間的夾角等對栽植運動軌跡有重要影響。
假設夾取抓DE長度固定,分析四連桿機構各桿件長度與角度的變化對栽植軌跡的影響。如圖4所示,桿OC、AB、BC的長度與角DAB的改變直接影響了栽植角度與深度的變化。此外,桿OA長度的變化對種植軌跡所圍成的面積也有影響,而角EDA的變化對栽植軌跡影響較小。
根據編程頁面調整四連桿機構參數,通過多組不同參數條件下的對比發現,當各桿件長度為OA∶OC∶AB∶BC∶AD∶DE=20∶105∶60∶80∶80∶60、∠EDA=80°、∠DAB=125°時,E點的運動軌跡可以較好滿足T/CAAMM 52—2020《甘薯復式栽植機》團體標準對甘薯裸苗斜插式移植的農藝要求,其具體參數和軌跡如圖5所示。
3 基于PLC的栽植機構電控系統設計
3.1 總體結構原理
如圖6所示,甘薯裸苗栽植機構電控系統工作原理為利用旋轉編碼器實時檢測地輪的行進速度,三菱FX3U系列PLC根據行進速度的變化實時調整電機的轉速做隨動控制,從而保證株距的穩定。
3.2 控制系統設計
試驗選用M法測速,通過一定的時間周期Δt內,測量編碼器輸出的脈沖個數M1來計算速度[9],如式(13)所示。
v=πM1dP1Δt×103(13)
式中: v——編碼器測得的作業速度,m/s;
M1——時間間隔內測得的脈沖總數;
P1——地輪旋轉編碼器每轉一圈發出的脈沖;
Δt——選取的時間周期,ms;
d——地輪直徑,m。
作業距離和作業時間、拖拉機前進速度的關系為
Δs=v×ΔT(14)
式中: ΔT——任意作業時間間隔,s;
Δs——ΔT時間內作業距離,m。
由于齒輪帶動夾取手運動,且齒輪轉動一圈夾取手栽植一次,因此作業距離和作業時間、理論移栽電機轉速、預設株距的關系式為
Δs=N160i1i2lΔT100(15)
式中: N1——理論移栽電機轉速,r/min;
l——預設株距,cm;
i1——電機減速器傳動比,取i1=5;
i2——夾取手齒輪傳動比,取i2=2.5。
綜合式(14)和式(15)可得,某時刻作業速度和理論移栽驅動電機轉速N1的關系為
N1=6 000i1i2lv(16)
控制器模擬量電壓輸出與移栽電機轉速關系,采用現場試驗標定并擬合曲線的方法[10]。通過試驗設定不同的模擬量電壓輸出同時測量相應的電機轉速,利用Matlab & Curve Fitting工具箱進行數據擬合,其方程和擬合度如圖7所示。
株距設置完成后,控制器通過作業速度與移栽電機轉速之間的函數關系計算理論電機轉速,并通過電壓—轉速擬合曲線方程,計算理論模擬電壓輸出控制電機轉動,依據電機實際轉速與理論轉速差值,作為參數自適應PID控制的反饋信號,閉環式控制移栽電機實時轉速。其控制系統結構如圖8所示。
為了提高控制系統的穩定性,電機理論轉速N1允許范圍為(N1±0.05N1),當實際轉速N>1.05N1或N<1.05N1時,認為不滿足理論轉速界限,并利用參數自適應PID進行修正,直至恢復到誤差允許范圍內,當檢測的電機轉速誤差在允許范圍之內,直流電機轉速維持不變。
4 田間性能試驗
4.1 試驗儀器與條件
試驗儀器主要有土壤水分儀、硬度測量儀、游標卡尺、卷尺、量角器、計數器和研制的甘薯裸苗斜插式移栽機構及其電控系統。如圖9所示,將研制的甘薯裸苗斜插式移栽機構及電控系統安裝在合作單位生產的甘薯裸苗移栽機上。
該機主要由旋耕機構、起壟機構、覆膜機構、覆土機構、甘薯裸苗斜插式移栽機構及其電控系統等組成。其主要作業參數如表1所示。
試驗在山東青州甘薯種植基地進行,試驗地土質為壤土、平均含水率16.3%、堅實度210kPa。試驗用甘薯苗品種為煙薯25號,苗齡均為35d,單株長度為20~25cm,距離苗根部30mm處的平均直徑為4.28mm。試驗前用旋耕機旋耕一遍。采用壟作不覆膜種植,起壟高度260mm,壟距為900mm,株距設置為20cm。
4.2 栽植機構及電控系統性能試驗
為驗證設計的斜插式栽植機構及其電控系統的栽植質量是否符合要求。利用加裝斜插式栽植機構及電控系統的甘薯移栽機進行試驗。試驗時控制車速分別處于0.4km/h、0.5km/h和0.6km/h三個速度。不同速度下各栽植100棵,重復3次,對種植后的立苗角度合格率、栽插深度合格率兩個農藝指標以及漏栽率、株距變異系數進行分析。為排除甘薯秧苗形態大小對試驗結果的影響,試驗所用甘薯秧苗在每個速度區間內重復使用。同時,為保證測區內拖拉機速度的精確,在試驗區域前后預留出供拖拉機加減速的足夠距離。參考T/CAAMM 52—2020《甘薯復式栽植機》,移栽深度合格指標為4~10cm,移栽角度合格指標為45°±3°。試驗結果如表2所示。
由表2分析可得,隨著作業速度的提高,栽植角度合格率和栽植深度合格率均值降低,漏栽率增加,但總體變化幅度不大。作業速度0.4km/h時,作業性能優于0.5km/h和0.6km/h,此作業速度下的移栽株距變異系數平均值為6.71%、栽植角度合格率平均值為94.3%、栽植深度合格率平均值為95.0%、漏栽率平均值為2.0%。3種作業速度下株距變異系數與漏栽率最大值分別為7.96%、4%,滿足甘薯裸苗移栽的要求。
4.3 株距控制穩定性對比試驗
為進一步檢驗設計的電控系統在甘薯裸苗移栽時株距控制穩定性方面的性能,開展與傳統利用拖拉機后輸出軸驅動的栽植性能對比試驗。栽植機構用拖拉機后輸出軸驅動在0.4km/h、0.5km/h和0.6km/h,3種速度下各栽植100株甘薯秧苗同時測出移栽株距。并與4.2節試驗中的第1次試驗株距測量值進行對比。
圖11為3種速度下兩種移栽控制方式的株距測量數據。可以看出,電控調節方式下的移栽株距在設定值處小范圍上下浮動,而拖拉機輸出軸控制傳動的方式株距值波動明顯,且隨著作業速度的增加移栽株距有明顯增大的趨勢。
從表3可以看出隨著速度的提升,拖拉機后輸出軸傳動的控制方式移栽平均株距由18.0cm增加至21.2cm,移栽株距受作業速度影響較大,而電控方式株距平均值變化不大。分析標準差與變異系數可知拖拉機后輸出軸傳動的方式,標準差最大值為3.0,變異系數最大為14.15%,且3種速度下標準差與株距變異系數明顯大于電控調節的方式,這體現了電控調節的優勢。
5 結論
1) 基于甘薯斜插種植農藝要求,設計一種基于四連桿機構原理的栽植機構。通過對移栽鉗夾運動軌跡分析和移栽軌跡仿真,確定四連桿各桿件最佳結構參數,可較好滿足甘薯斜插種植農藝要求。
2) 本文設計基于旋轉編碼器測速的移栽隨動控制系統,實現移栽株距穩定、可調。田間試驗表明,設計的電驅式甘薯移栽機構,按所設定的移栽株距工作時,移栽株距平均變異系數為7.30%,最大變異系數為7.96%。與傳統拖拉機輸出軸驅動相比具有較好的株距穩定性。
參 考 文 獻
[1]趙海, 劉新鑫, 潘志國, 等. 甘薯種植農藝及機械化種植技術研究[J]. 中國農機化學報, 2021, 42(6): 21-26.
Zhao Hai, Liu Xinxin, Pan Zhiguo, et al. Agronomic characteristics and mechanized planting technology of sweet potato [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(6): 21-26.
[2]范澤民, 陳衛, 劉新亮, 等. 壓苗式甘薯移栽機研制探討[J]. 中國農機化學報, 2018, 39(11): 1-3.
Fan Zemin, Chen Wei, Liu Xinliang, et al. Discussion on transplanting machine of sweet potato by pressurizing seedlings [J]. Journal of Chinese Agricultural Mechanization, 2018, 39(11): 1-3, 16.
[3]Yan W, Hu M J, Li K, et al. Design and experiment of horizontal transplanter for sweet potato seedlings [J]. Agriculture, 2022, 12(5): 675.
[4]Liu Z D, Wang X, Zheng W X, et al. Design of a sweet potato transplanter based on a robot arm [J]. Applied Sciences, 2021, 11(19): 9349.
[5]胡良龍, 王冰, 王公仆, 等. 2ZGF-2型甘薯復式栽植機的設計與試驗[J]. 農業工程學報, 2016, 32(10): 8-16.
Hu Lianglong, Wang Bing, Wang Gongpu, et al. Design and experiment of type 2ZGF-2 duplex sweet potato transplanter [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(10): 8-16.
[6]申屠留芳, 唐立杰, 孫星釗, 等. 指夾式甘薯移栽機栽植機構的設計與仿真[J]. 江蘇農業科學, 2018, 46(14): 223-226.
Shentu Liufang, Tang Lijie, Sun Xingzhao, et al. Design and simulation of planting mechanism of finger clip sweet potato transplanting machine [J]. Jiangsu Agricultural Sciences, 2018, 46 (14): 223-226.
[7]莊如月. 甘薯裸苗移栽機構優化設計與試驗研究[D]. 杭州: 浙江理工大學, 2021.
Zhuang Ruyue. Optimization design and experimental study on transplanting mechanism of sweet potato seed seedlings [D]. Hangzhou: Zhejiang University of Technology, 2021.
[8]王大同. 臥式輸送帶式甘薯移栽機的設計[D]. 武漢: 華中農業大學, 2017.
Wang Datong. Design of horizontal conveyor belt sweet potato transplanting machine [D]. Wuhan: Huazhong Agricultural University, 2017
[9]丁友強, 楊麗, 張東興, 等. 基于GPS測速的電驅式玉米精量播種機控制系統[J]. 農業機械學報, 2018, 49(8): 42-49.
Ding Youqiang, Yang Li, Zhang Dongxing, et al. Control system of motor-driving maize precision planter based on GPS speed measurement [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49 (8): 42-49.
[10]高原源, 王秀, 楊碩, 等. 播種機氣動式下壓力控制系統設計與試驗[J]. 農業機械學報, 2019, 50(7): 19-29.
Gao Yuanyuan, Wang Xiu, Yang Shuo, et al. Design and test of pneumatic downforce control system for planting [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50 (7): 19-29.