紅花采摘機器人移動平臺設計與分析
2024-06-17 19:02:10路昊郭輝高國民董芙楠武天倫
中國農機化學報 2024年6期
路昊 郭輝 高國民 董芙楠 武天倫
摘要:針對紅花采摘移動平臺自走能力差,在不平整田間地面工作時位姿發生傾斜等問題,設計一種紅花采摘移動平臺,并對移動平臺的整體性能進行理論分析,確定移動平臺結構設計的合理性。通過ANSYS靜力學分析模擬移動平臺在彎曲、扭轉工況下的位移量和等效應力,得到移動平臺最大變形量為2.95 mm,發生在移動平臺的右后輪位置;最大應力為235.8 MPa,發生在后輪車架連接位置;整體位移量和應變較小,移動平臺結構滿足要求。對設計的移動平臺進行越障與爬坡性能試驗,試驗結果表明:移動平臺可以順利啟動并保持一定速度勻速行走,動力性能良好,極限越障高度為61.2 mm,縱向極限傾翻角等于19.7°,橫向極限傾翻角為18.3°。設計的移動平臺具有較好的結構和性能,可為紅花采摘作業機械提供綜合應用平臺并可為后續的實地田間試驗提供支撐。
關鍵詞:紅花;采摘移動平臺;性能分析;靜力學分析;越障試驗
中圖分類號:S225.1
文獻標識碼:A
文章編號:2095-5553 (2024) 06-0242-08
收稿日期:2022年1月13日
修回日期:2023年 3月 28日
*基金項目:新疆維吾爾自治區自然科學基金(2022D01A177)
第一作者:路昊,女,1997年生,山東濱州人,碩士研究生; 研究方向為農業裝備。E-mail:372379224@qq.com
通訊作者:郭輝,男,1979年生,烏魯木齊人,副教授;研究方向為特色作物采收關鍵技術與裝備。E-mail:gh97026@126.com
Design and analysis of mobile platform for safflower picking robot
Lu Hao, Guo Hui, Gao Guomin, Dong Funan, Wu Tianlun
(College of Mechanical and Electrical Engineering, Xinjiang Agricultural University, Urumqi, 830052, China)
Abstract: In view of the poor self-propelled ability of the safflower picking mobile platform and the tilting of the position when working on uneven field ground, a safflower picking mobile platform was designed, and the overall performance of the mobile platform was analyzed theoretically to determine the rationality of the structural design of the mobile platform. The displacement and equivalent force of the mobile platform under bending and torsion conditions were simulated by ANSYS static analysis, the maximum deformation of the mobile platform was 2.95mm, which occured at the right rear wheel position of the mobile platform, the maximum stress was 235.8 MPa, which occurred at the rear wheel frame connection position, the overall displacement and strain was small, and the mobile platform structure met the requirements. The obstacle crossing and climbing performance test of the designed mobile platform was carried out, and the test results showed that the designed mobile platform could start smoothly and keep a certain speed to walk at a constant speed with good power performance, the ultimate overrun height was 61.2mm, the longitudinal ultimate tipping angle was equal to 19.7°, and the transverse ultimate tipping angle was 18.3°. The designed mobile platform has a good structure and performance, which can provide a comprehensive application platform for safflower picking machinery and can provide support for subsequent field trials.
Keywords: safflower; picking mobile platform; performance analysis; static analysis; obstacle crossing test
0 引言
紅花又稱為草紅花,廣泛地被用于與活血止痛有關的病癥上,而且紅花成熟后結成的紅花籽,是世界三大保健品之一紅花油的主要原材料。在數十個世紀前,我國新疆地區就開始了紅花的種植,遍及較多的地區,就目前來看,新疆的紅花產量已經位列全國之首。由于紅花采摘費事費力,而且成本較高,因此紅花產業的發展受到限制[1],而且紅花開花時間比較集中,花期短,如果采摘不及時會造成紅花的損失率增大。隨著信息技術和農業的結合,使用移動平臺作為載體進行農業作業時對復雜地形具有較大的工作靈活性[2],可以將人解放出來,并且可以提高作業效率。因此針對紅花采摘設計研制一種移動平臺是解決在節省勞力,提高效率和質量等方面具有比較大的意義。
國內外諸多的研究工作者對各種各樣的移動平臺進行了研究,做了眾多創新與改良。伍錫如等[3]設計了一種針對蘋果采摘的移動平臺,該移動平臺由四輪獨立驅動,同時配有激光測距儀,可檢測距離50 cm外的障礙物,該移動平臺適應性強,具有良好的避障能力。Bao等[4]設計了一種專門在山地果園環境中工作的通用移動平臺結構,采用履帶式結構,通過電力驅動。Zhang等[5]設計了一種可以全向運動的移動平臺,移動平臺采用麥克納姆輪,可以實現橫向、縱向等復雜的運動,每個車輪與車身通過彈簧懸架連接,可以減輕車身的晃動,保證移動平臺運動過程中的平穩性。Fan等[6]設計了一種由六個輪腿單元組成的移動平臺,采用曲柄電機和俯仰連桿電機驅動聯合實現越障功能,具有高機動性。以上所述移動平臺只能適用于田間地形良好的情況,當田間地形不平整時,無法保證采摘平臺的水平。針對田間紅花采收的機械有梁丹丹等[7]設計了一種可移動式的紅花采摘行走裝置,該裝置主要由機架和地輪組成,依靠人力推動在田間行走進行紅花的采摘工作,該裝置是針對氣吸式的采摘機構而設計的,還未完全實現自動化在田間的行走。目前針對紅花采收的機械大多以人工背負式或手持式為主,還未完全擺脫人工的參與,自動化水平低,采收效率低。
因此本研究結合紅花種植規模和種植地形等要求,為實現紅花采摘機器人移動平臺的自主化行走和位姿調整,設計一種紅花采摘機器人移動平臺。該移動平臺采用兩個萬向輪通過兩個驅動電機的差速運轉進行方向的轉動,驅動方式采用鏈輪鏈條驅動帶動驅動輪在田間行走,針對田間地勢不平而影響采摘機械臂采摘精度問題,該平臺安裝有4個電動推桿,在不平整的田間可通過調整電動推桿伸縮量使采摘平臺保持水平,保證采摘精度。
1 移動平臺整體結構
1.1 工作環境與總體結構
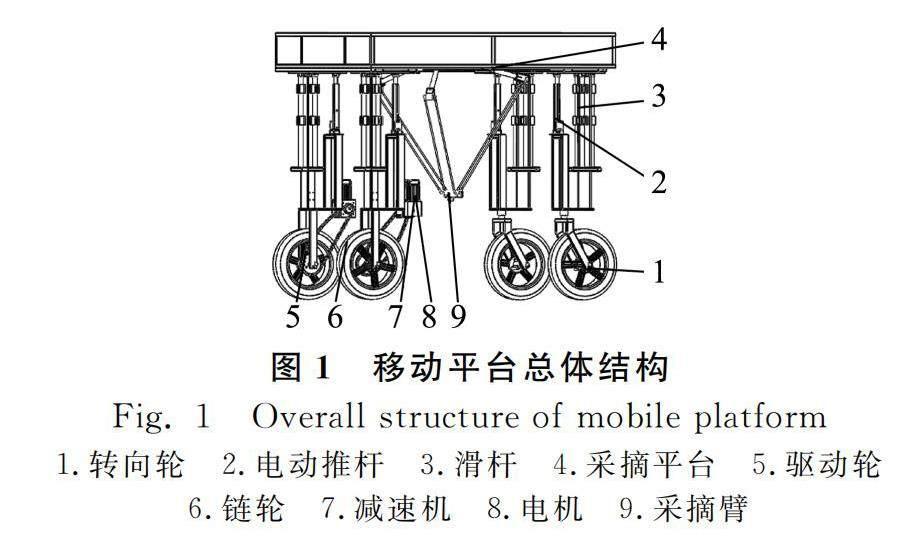
農田間作業環境復雜,需要設計高性能的采摘機械,有一定的越障性能和支撐強度,從而避免在工作過程中損傷作物,因此為紅花采摘工作設計一種適應性移動平臺。設計的紅花采摘機器人移動平臺適用于田間規范化種植的紅花采摘,即紅花生長高度一般在450~750mm之間,行間距為200~450mm,田間紅花種植存在地面不平整情況。移動平臺的設計涉及多個方面,因此移動平臺各個部分選擇方案如下:(1)電機驅動慣性低,具有高的可靠性,適合高精度的場合,因此移動平臺采用電力驅動方式。(2)輪式行走的方式容易控制而且轉向靈活,易于控制,因此設計的移動平臺采用輪式行走方式。(3)四輪行走方式具有結構簡單,穩定性好的優勢,因此移動平臺選擇四輪行走方式。移動平臺采用間歇式行進的方式,通過萬向輪進行轉向,轉向控制通過驅動電機的差速實現,由于前輪驅動性能好,傳動效率高[8],因此采用前輪驅動后輪轉向的形式。(4)移動平臺箱體要放置采摘臂及各種元器件,因此要預留出相應的空間,使各個部分不受干擾。(5)由于地面高低不平的情況,移動平臺在采摘過程中會由于地面不平整的情況而出現采摘平臺傾斜的狀況,由于移動平臺是機械臂的搭載載體,因此當移動平臺傾斜時,相機所識別的紅花采摘區域的紅花三維坐標會發生改變,影響機械臂的采摘精度,因此要保持移動平臺的水平,因此平臺要實時調節的移動平臺高度。移動平臺采用4個電動推桿作為調節機構,根據平臺傾斜情況可實時調節高度來保證采摘平臺的平衡與穩定性。移動平臺作為機械臂的搭載平臺,其在田間行走的工作流程為:移動平臺行進到需要機械臂采摘的紅花位置,制動停車,電動推桿根據采摘平臺的傾斜情況進行采摘平臺的調平,調平結束后,由機械臂采摘紅花,等待該區域紅花采摘完成之后前往下一個區域進行工作。
根據紅花種植模式與紅花的生長高度要求,移動平臺采用騎跨式采摘。設計移動平臺的各結構參數為:移動平臺整體最低高度為1100mm,最大高度為1300mm,設計前后軸距1300mm。由于不同區域田間種植的紅花種植行距存在差異,因此設置左右轉向輪和驅動輪間距可調,可調范圍為900~1100mm,可跨二行或三行進行采摘紅花。移動平臺各支腿的支撐機構采用直線滑桿和角鋼,安裝在移動平臺的4個對角位置,滑桿由固定軸承座固定在角鋼上,增加移動平臺的承載能力。移動平臺總體結構如圖1所示,由紅花采摘要求,主要由采摘平臺、滑桿、電動推桿、轉向輪、采摘臂、電機、減速機、鏈輪、驅動輪組成。采摘平臺由40mm×20mm×2mm的方鋼焊接制成的長寬均為1500mm的正方形結構,實現輕量化設計。采摘平臺可放置采摘機器臂,電池,雙目相機,控制柜及其他電子裝置。移動平臺各部分機構之間通過螺栓連接,可方便拆卸和安裝。考慮到紅花行間距為400mm,作業環境狹窄,因此對移動平臺的傳動系統在空間限制上要求嚴格,傳動系統一般分為帶傳動和鏈傳動,但其中帶傳動有時會有明顯的打滑或者彈性滑動產生,因此移動平臺采用鏈傳動方式對其傳動系統進行設計[9]。采用鏈輪鏈條驅動帶動驅動輪在田間的行進。減速器采用直角減速器,可以減小安裝空間。驅動機構主要部件為電機,直角減速機,鏈條,主動齒輪,從動齒輪組成,電機與直角減速器連接,減速機通過特有的支架固定在驅動輪支架上,與減速機軸相連的主動齒輪帶動與驅動輪轉動軸相連的從動齒輪完成動力傳輸,進而使輪子轉動。
1.2 關鍵部件設計
位姿調節機構由包括電動推桿與三角支撐機構,三角支撐包括滑桿、角鋼,安裝在移動平臺的四個支腿位置電動推桿與移動平臺采用螺栓連接,三角支撐與移動平臺上端采用螺栓連接,下端采用焊接,上端采用螺栓連接可根據紅花種植行距隨時調節移動平臺的左右間距。移動平臺通過電動推桿的伸縮運動帶動滑桿的上下升降,以電力控制驅動機械結構,從而實現在田間不平地面工作時的位姿調整,保證移動平臺采摘平臺的水平。也可根據紅花的生長的高度進行整體移動平臺的升降,從而保證紅花在移動平臺機械臂的采摘范圍內,實現精準采摘。四個獨立的行走支腿,采用電動推桿與三角支撐共同作用的方式,不僅具有位姿調整的作用,還可以增大移動平臺的整體承載能力,在移動平臺越障爬坡過程中保持底盤的穩定性。
2 性能分析
移動平臺作業的田間地形復雜,在復雜環境下的適用性能有靜態穩定性、通過性、牽引力和阻力性能[10]。對移動平臺進行性能分析,可以為后續的靜力學仿真提供依據。
2.1 移動平臺支撐力性能分析
移動平臺的整體重量是由4個支腿上的電動推桿與角鋼承載的,對4個電動推桿進行力學研究,可以得到單個電動推桿的受力情況,從而分析電動推桿的支撐性能是否滿足要求。在對移動平臺進行支撐性能分析時,假設移動平臺無論受力與否,都不會發生形變[11]。由于電動推桿是線性運動結構,所以4根電動推桿只允許上下移動,因此僅對豎直方向進行受力分析。
移動平臺水平時,4根電動推桿受力相同,此時不會出現單個電動推桿受力最大的情況,只有當移動平臺傾斜時,整體重量會落到某一根電動推桿上,分析此時電動推桿的最大受力,只有當電動推桿的推力大于最大受力,電動推桿才能將移動平臺調平。
如圖2所示,對傾斜狀態時的移動平臺建立靜力學模型分析各電動推桿受力大小。O-XYZ為固定坐標系,O-X1Y1Z1為相對坐標系。平臺重心P(PX,PY,PZ),移動平臺X軸傾角α,Y軸傾角β。
移動平臺在空間中繞XY軸旋轉后的旋轉矩陣為
R=RXRY=cosα0sinβ
sinαsinβcosα-sinαcosβ
-cosαsinβsinβcosαcosβ(1)
O-XYZ坐標系中電動推桿P1、P2、P3、P4的坐標為
P1=-a2,-a2,0T
P2=-a2,a2,0T
P3=a2,a2,0T
P4=a2,-a2,0T(2)
移動平臺旋轉矩陣R后,電動推桿P1、P2、P3、P4坐標為
P1=-a2cosβ,-a2(sinαsinβ+cosα),a2(cosαcosβ-sinα)T
P2=-a2cosβ,-a2(cosα-sinαsinβ),a2(cosαcosβ+sinα)T
P3=a2cosβ,a2(sinαsinβ+cosα),a2(sinα-cosαsinβ)T
P4=a2cosβ,a2(sinαsinβ-cosα),a2(-cosαsinβ-sinα)T(3)
根據平衡條件,移動平臺傾斜后的平衡方程為
∑NX=0 ∑NY=0 ∑NZ=0(4)
式中:NX——X方向力矩;
NY——Y方向力矩;
NZ——Z方向受力。
移動平臺初始位置平衡方程為
∑4i=1Ni-G=0
∑4i=1NiPY-GPY=0
∑4i=1NiPX-GPX=0(5)
假設四條電動推桿全部受到了同等的力,則滿足形變平衡方程
N1L1+N3L3=N2L2+N4L4(6)
式中:Ni——各電動推桿的內力;
Li——電動推桿原長。
移動平臺到水平狀態時重心坐標為P(0,0,0),將式(3)代入式(5)得
N1+N2+N3+N4=G
(N3-N1)a2(sinαsinβ+cosα)+
a2(sinαsinβ-cosα)(N4-N2)=0
-a2cosβ(N1+N2+N4-N3)=0(7)
由式(6)、式(7)可得出各電動推桿與移動平臺傾角的關系,在讀取傾角傳感器的傾角數據后,就可得出各電動推桿受力狀況。由三角函數分析知α和β的最大傾斜角度均為11.54°,把最大傾斜角度代入公式后得到電動推桿最大受力為800N,由于電動推桿長度限制,移動平臺傾斜角度達不到11.54°,所以電動推桿最大受力小于800N,選取的電動推桿最大推力為1000N,因此移動平臺的支撐符合要求。
2.2 穩定性能分析
移動平臺的橫向穩定性能是指當移動平臺在田間工作時,當遇到斜坡時不會產生傾翻和滑移的能力。由于移動平臺的底盤較地面高度較高,因此移動平臺的重心較高,而且移動平臺的高度是可變的,所以重心高度隨平臺的高度的變化而變化,在斜坡上行走或工作時不易保持穩定性,所以移動平臺的穩定性能是確保移動平臺在坡道行駛的一個重要指標。移動平臺的穩定性能有縱向和橫向極限翻傾角。
2.2.1 縱向極限翻傾性能分析
縱向極限翻傾角是指當移動平臺在坡道上靜止時,始終保持車體穩定且不產生縱向翻傾的最大坡度角稱為縱向極限翻傾角。當移動平臺在上坡時(圖3),由受力分析建立如式(8)所示。
F1+F2=Gsinαlim
Z1+Z2=Gcosαlim
Gsinαlimh+Z2H-GcosαlimH2=0(8)
式中:F1、F2——前后輪制動力,N;
Z1、Z2——土壤對車輪的支反力,N;
αlim——上坡極限傾翻角,(°);
H——軸距,H=1.3m;
h——重心到地面的距離,h=1.3 m;
H2——后輪到重心的距離,H2=0.65 m。
當移動平臺處于上坡的翻傾極限狀態時,Z1=0,此時,αlim=arctanH2h=26.6°。
分析可知重心位置靠前,上坡性能越好,重心位置靠后,下坡性能越好,為了保證上坡和下坡具有相同良好的性能,將移動平臺的重心位置設置在移動平臺的中心,使重心位置到前輪和后輪距離相等,此時移動平臺的上坡和下坡縱向極限傾翻角相同,都為26.6°。
2.2.2 橫向極限翻傾性能分析
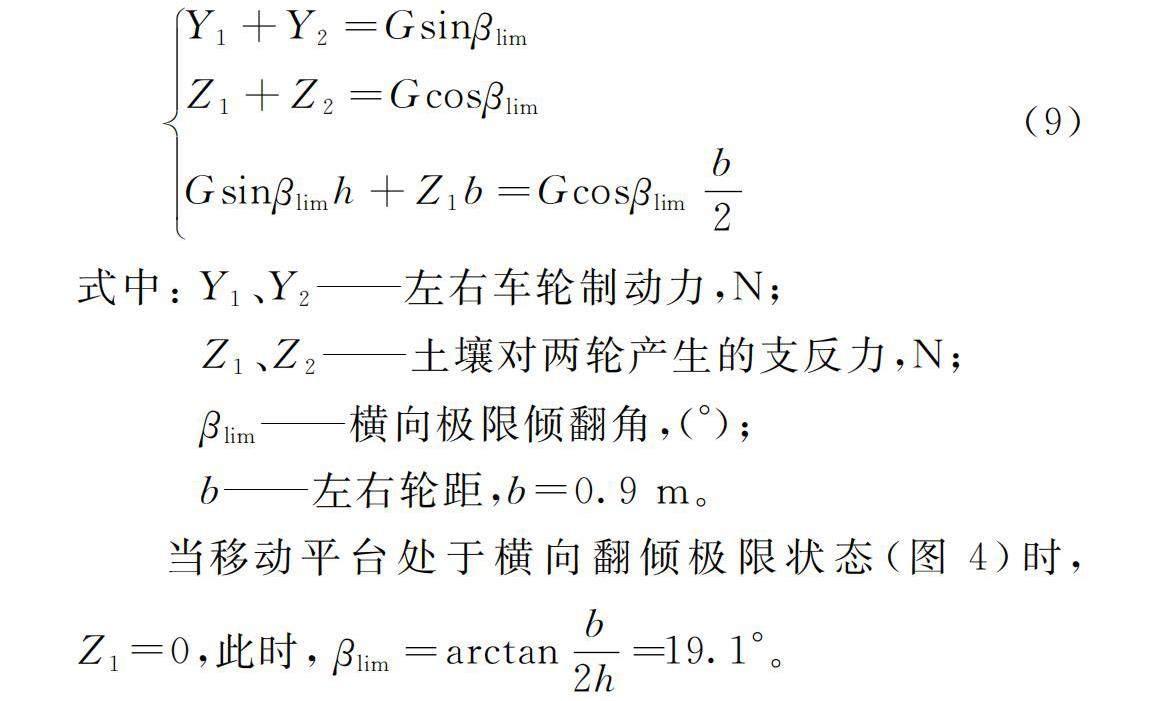
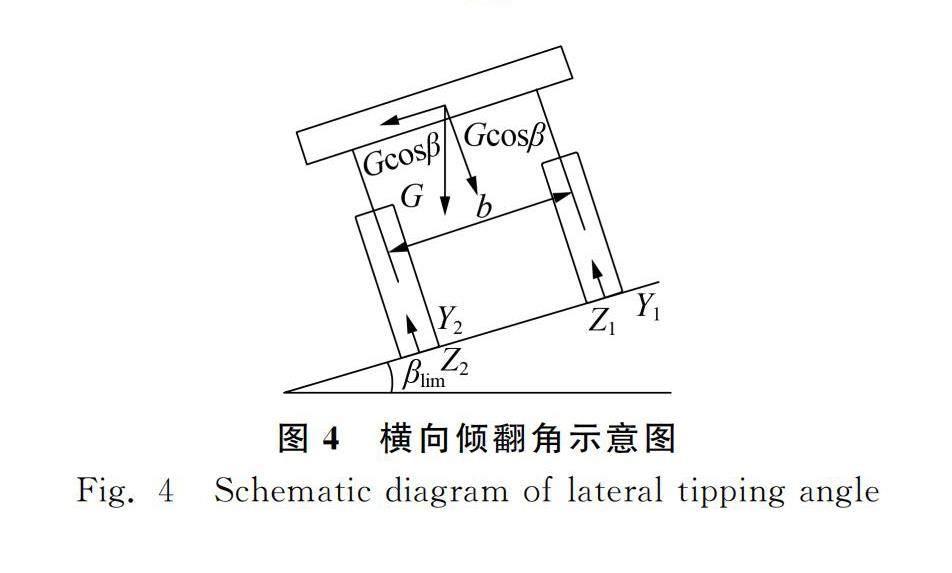
Y1+Y2=Gsinβlim
Z1+Z2=Gcosβlim
Gsinβlimh+Z1b=Gcosβlimb2(9)
式中:Y1、Y2——左右車輪制動力,N;
Z1、Z2——土壤對兩輪產生的支反力,N;
βlim——橫向極限傾翻角,(°);
b——左右輪距,b=0.9 m。
當移動平臺處于橫向翻傾極限狀態(圖4)時,Z1=0,此時,βlim=arctanb2h=19.1°。
2.3 前輪越障性能分析
移動平臺在進入田間工作時由于地形凹凸不平,因此要研究移動平臺在田間地形工作時能否跨越障礙的能力,移動平臺在工作時處于低速狀態,可轉化為靜力學問題分析[12]。在分析過程中忽略輪胎變形。
由圖5可知前輪碰到障礙時,受力如式(10)所示。
FP1cosα1+μFP2-μFP1sinα1=0
FP1sinα1+μFP1cosα1-FP2-G=0
FP1Dμ2-FP2Dμ2+GH1-FP2H=0(10)
式中:μ——土壤附著系數,μ=0.9;
FP1——障礙對前輪的法向作用力,N;
FP2——后軸載荷,N;
α1——前行走輪法向作用力與水平面夾角;
D——車輪直徑,D=0.4 m;
H1——行走輪前軸至重心距離, m;
h1——前輪越障高度,mm。
由幾何關系可知,sinα=1-2h1/D,代入式 (10)可得
h1=D21-μD2H1-μD2Hδ2+1-μD2H22+1-μDHδ2+1-μD2H2+
D2μD2H1-μD2Hδ2+1-μD2H2(11)
其中,δ=1μ-1+μ2μ·H1H-D2H(12)
將D、H1、H、μ代入式(11)得前輪越障高度為86.1 mm,且越障高度與D和H1有關,當D和H1越大,越障性能越好。在越障性能分析中,以前輪越障能力作為整個移動平臺越障性能的指標,因此當前輪越障能力達到要求時,后輪越障能力也可滿足要求。
由于重心位置在移動平臺的中心,加之重心位置的改變對越障高度的影響不大,因此越障高度h1只與車輪直徑D有關。提高移動平臺的越障性能可選擇直徑較大的輪。
2.4 移動平臺直線行走性能分析
2.4.1 阻力分析
移動平臺在田間地面的行走要克服各種形式的阻力,主要有輪胎與地面接觸的滾動阻力Ff,靜止啟動阻力Ff1,移動平臺行走所受的空氣阻力Fw,移動平臺上坡行走時所受坡道的坡度阻力Fi,移動平臺加速行走時受到的空氣加速度阻力Fj[13]。因此移動平臺受到的阻力之和為:
F1′=Ff+Fw+Fi+Fj
Fw=12CBρv2
Ff=mgfcosβ1
Fi=mgfsinβ1
Fj=ma(13)
式中:F1′——驅動輪的阻力,N;
β1——田間地形傾斜角度;
Ff——滾動阻力,N;
Fw——空氣阻力,N;
Fi——爬坡阻力,N;
Fj——加速度阻力,N;
C——空氣阻力系數;
B——迎風系數,m2;
ρ——空氣密度,kg/m3;
f——滾動阻力系數;
m——移動平臺自重,kg;
a——移動平臺行走的加速度,m/s2;
v——移動平臺行走速度,m/s。
由于移動平臺工作時的速度較低,空氣阻力可忽略不計。田間地面滾動阻力系數f=0.025~0.035,取中間值,f=0.030。對田間地形坡度進行測量,移動平臺行駛最大坡度小于15°,取β1=15°,將各參數帶入計算可得移動平臺行走時阻力為863N。
2.4.2 牽引力分析
移動平臺的牽引力反映行走機構的動力性能[14],
驅動輪的牽引力是由驅動電機經減速器和齒輪后傳遞的,驅動輪產生的牽引力為
F2′=TiN2rN1(14)
式中:F2′——驅動輪的牽引力,N;
r——驅動輪半徑,r=0.2 m;
T——驅動電機轉矩,N·m;
i——減速機減速比,i=52;
N2——從動輪齒數,Z2=30;
N1——主動輪齒數,Z1=12。
由移動平臺所受阻力大小選擇移動平臺驅動電機的功率
P=F1′v1 000=1.04 kW
移動平臺行走速度v=1.2m/s,由于移動平臺采用的是兩輪驅動行走方式,所以每個電機的功率為0.502kW,為了保證移動平臺具有更好的牽引性能及市面上已有的電機性能參數,選擇功率為0.75kW的驅動電機,驅動電機的額定轉矩為2.4N·m,最大轉矩為7.2N·m,經計算得出牽引力為1560N,最大牽引力為4680N。對移動平臺進行牽引力和阻力計算得出,牽引力大于阻力,因此移動平臺動力性能良好。牽引力越大,則移動平臺的直線行走性能越好,在爬坡和越障時有更好的通過性能和穩定性能。
3 移動平臺有限元分析
移動平臺的剛度與強度直接影響著移動平臺工作性能,因此對移動平臺整體車架進行有限元分析,并進行優化設計保證移動平臺在田間工作時可以承受較大的載荷,使移動平臺順利工作。進行有限元分析前,確定移動平臺整體所選用材料,移動平臺整體框架選用45號型材方鋼材料,機械臂搭載平臺材料選用鋁板,材料參數如表1所示。
3.1 網格劃分
對移動平臺采用ANSYS Workbench 18.0進行有限元模型的分析,忽略掉四個輪子和整個箱體框架及電動推桿,僅保留移動平臺整體框架。對靜力學分析的模型進行簡化,使得分析后的結果在準確的同時符合實際情況[15],忽略孔和非承載件影響,同時將移動平臺中的焊接認為是理想焊接[16]。按移動平臺中各部分的實際裝配方式設置在ANSYS中的接觸類型:焊接的零件之間設置為bonded[17],螺栓連接的零件部分設置為NO Separation。
將SOLIDWORKS三維模型保存為X-T模式導入有限元分析軟件中,移動平臺整體模型過大,對模型劃分大小合適的網格可以保證分析的速度與精度,使得有限元分析的效果最好[18]。在ANSYS MESH中進行網格劃分,在結構簡單的部分將網格尺寸大小設置為15mm,在采摘平臺與各支腿連接處將網格尺寸劃分到10mm,更改各個部分的材料屬性,模型網格劃分共得到節點數為603041,單元數為219663。
3.2 施加載荷
為檢驗移動平臺在滿載時勻速行駛時車架整體性能情況,根據實際受力情況對移動平臺施加對應的載荷。移動平臺所受載荷主要是控制柜,電池、機械臂和其余各種零器件產生的力和平臺行走時地面狀況施加的力。移動平臺自重可在ANSYS軟件自動計算后添加,根據各部件的實際安裝位置對移動平臺施加相應位置的力,以此模擬平臺在實際工作時所受力的情況。
有限元分析以靜力學為基礎,對車架整體性能進行分析,以剛度和強度滿足要求為指標,分析移動平臺的位移和等效應力,移動平臺在所加載載荷一定的情況下,位移和等效應力越小,則移動平臺性能越好。當移動平臺在田間進行作業時,由于環境比較復雜,因此車架所受載荷也比較復雜,根據移動平臺不同的作業狀態,移動平臺在彎曲、扭轉兩種工況下剛度和強度所受影響最大,因此模擬這兩種工況下的移動平臺位移和等效應力情況。
移動平臺的彎曲工況是移動平臺在滿載狀態下,移動平臺在靜止或勻速行走時的位移和等效應力分布情況,考慮作業速度和作業環境的影響[19],將動載荷系數設定為2.5。圖6是移動平臺彎曲工況位移分布云圖,最大變形量為0.425mm,發生在移動平臺的中心位置,這是因為移動平臺在此位置要受到機械臂和電池施加的載荷,因此變形量大于其余位置,同時可以看出移動平臺的變形量大致相同,移動平臺有較好的配重比。圖7為移動平臺的應力分布云圖,可以看出,所受應力較小大多在11MPa范圍內,最大應力為99.02MPa,小于許用應力142MPa,移動平臺設計符合要求。
移動平臺的扭轉工況是移動平臺在滿載狀態下,移動平臺在田間工作時,由于路面狀況使得四條支腿不能同時著地時的位移和等效應力分布情況,選取動載荷系數為1.3。扭轉工況時,假設移動平臺右后輪懸空。圖8是移動平臺位移分布云圖,最大變形量為2.95mm,發生在移動平臺的右后輪位置,圖9為移動平臺的應力分布云圖,可以看出,所受應力較小大多在26.2MPa范圍內,最大應力為235.8MPa,發生在后輪車架連接位置,扭轉變形時此位置會阻礙發生變形導致應力集中,但整體應力小于許用應力273MPa,移動平臺設計符合要求。
3.3 樣機試制與測試
為了驗證設計的移動平臺的作業性能和各項參數的合理性,結合理論分析與靜力學模擬分析制作紅花采摘機器人移動平臺,并將移動平臺的各部分按預定的位置進行安裝,在新疆農業大學校內選取合適的場地對所制作的紅花采摘機器人移動平臺進行性能試驗。由于電動推桿對整體移動平臺的性能影響不大,因此在進行試驗時不安裝電動推桿。
1) 越障試驗。在越障試驗中,移動平臺滿載,行走速度調至最大從而驅動移動平臺跨越障礙物,分別選取三處具有不同臺階高度的場地,來獲得移動平臺不同的越障參數。對同一臺階高度進行多次試驗,保證結果的準確性, 并用卷尺(精度1mm)記錄越障數據。
2) 爬坡試驗。在爬坡試驗中,設計不同坡度的坡道,用水平儀測量坡道的坡度,坡道的長度大于移動平臺的整體長度, 對移動平臺進行極限傾角測試,移動平臺以勻速行駛到斜坡上,記錄移動平臺保持靜止狀態的不同坡道的坡度數據。
移動平臺性能測試結果如表2所示。
試驗得到移動平臺前輪越障高度為61.2 mm,上坡和下坡縱向極限翻傾角為19.7°,橫向極限翻傾角為18.3°,在實際試驗過程中,由于移動平臺本身制作誤差和進行試驗的道路環境存在差異,使得理論分析值與實際測試值有一定誤差,但設計的移動平臺仍滿足工作要求。
4 結論
1) 針對紅花種植模式以及紅花采摘作業特點設計一種紅花采摘移動平臺,闡述移動平臺整體結構和工作原理。移動平臺整體離地間隙1100~1300mm,軸距1300mm,并設計左右輪距可調,可調范圍900~1100mm,高度可調、左右輪距可調以適應紅花種植行距及生長高度不一的問題,滿足紅花采摘作業要求。
2) 對移動平臺進行靜力學分析,得到單個電動推桿最大受力800N,小于選用電動推桿的推力,移動平臺的支撐性能良好。對車輪進行穩定和通過性能分析,得到前輪越障高度為86.1mm,上坡和下坡縱向極限翻傾角為26.6°,橫向極限翻傾角為19.1°,且越障性能與車輪直徑和重心位置有關,為了保證移動平臺的穩定性和越障性,將重心位置設置在移動平臺中心,因此越障性能僅與車輪直徑有關,車輪直徑越大,越障性能越好。計算移動平臺行駛中所受阻力的大小從而選擇合適的電機進行驅動,使移動平臺動力設計滿足要求。
3) 對移動平臺框架進行彎曲和扭轉工況的有限元靜力學分析,得到彎曲和扭轉工況下的位移分布云圖和等效應力云圖,在滿載情況下,最大變形量2.95mm,移動平臺的變形量較小,最大等效應力為235.8 MPa,小于移動平臺制作材料的屈服極限,設計的移動平臺結構符合要求。
4) 對制作的移動平臺樣機進行性能試驗,試驗結果表明,移動平臺動力性能良好,極限越障高度為61.2mm,縱向極限傾翻角為19.7°,橫向極限傾翻角為18.3°,雖與理論分析(越障高度86.1°,縱向極限翻傾角26.6°,橫向極限翻傾角均為19.1°)存在一定誤差,但仍滿足工作要求。
參 考 文 獻
[1]楊會鋒. 新疆紅花絲機械化采收研究現狀[J]. 新疆農機化, 2020(5): 34-37.
Yang Huifeng. Research status of mechanized harvesting of safflower silk in xinjiang [J]. Xinjiang Agricultural Mechanization, 2020(5): 34-37.
[2]De-An Z, Jidong L, Wei J, et al. Design and control of an apple harvesting robot [J]. Biosystems Engineering, 2011, 110(2): 112-122.
[3]伍錫如, 黃國明, 劉金霞, 等. 新型蘋果采摘機器人的設計與試驗[J]. 科學技術與工程, 2016, 16(9): 71-79.
Wu Xiru, Huang Guoming, Liu Jinxia, et al. Design and experiment of a new type apple picking robot [J]. Science Technology and Engineering, 2016,16 (9): 71-79.
[4]Bao X, Mao J, Dai P, et al. Research on trajectory planning and control system of general mobile platform for mountain orchard [J]. The Journal of Engineering, 2022, 2022(5): 466-477.
[5]Zhang W. Design and adaptive control of omni-directional mobile platform with four driving wheels [J]. American Journal of Scientific Research and Essays, 2018, 3(7).
[6]Fan X M, Ruan Q. Design and locomotion analysis of a close-chain leg-wheel mobile platform [J]. Industrial Robot: the international journal of robotics research and application, 2023, 50(1): 122-134.
[7]梁丹丹, 李帥波, 王立強, 等. 可移動式紅花收獲裝置的設計[J]. 新疆農機化, 2021(2): 21-23.
Liang Dandan, Li Shuaibo, Wang Liqiang, et al. Design of movable safflower harvesting device [J]. Xinjiang Agricultural Mechanization, 2021 (2): 21-23.
[8]李磊, 葉濤, 譚民, 等. 移動機器人技術研究現狀與未來[J]. 機器人, 2002(5): 475-480.
Li Lei, Ye Tao, Tan Min, et al. Present state and future development of mobile robot technology research [J]. Robot, 2002(5): 475-480.
[9]張延尊. 丘陵山區茶園管理機移動平臺的研制[D]. 重慶:西南大學, 2020.
Zhang Yanzun. Development of mobile platform for tea garden management machine in hilly and mountainous areas [D]. Chongqing: Southwest University, 2020.
[10]閆樹兵. 基于虛擬樣機技術農業輪式移動平臺的機械子系統研究[D]. 南京:南京農業大學, 2007.
Yan Shubing. A study on mechanical subsystem agricultural wheeled mobile platform based on virtual prototyping technology [D]. Nanjing: Nanjing Agricultural University, 2007.
[11]孫書鵬. 全自動調平試驗系統研究[D]. 石家莊:河北科技大學, 2014.
Sun Shupeng. Research of automatic leveling test system [D]. Shijiazhuang: Hebei University of Science and Technology, 2014.
[12]沈紅光. 高地隙折腰式水田動力底盤設計與試驗[D]. 哈爾濱:東北農業大學, 2017.
Shen Hongguang. Design and experiment of high-clearance roll-waist power chassis for paddy field [D]. Harbin: Northeast Agricultural University, 2017.
[13]季位文. 高地隙植保機底盤結構設計與試驗研究[D]. 長沙:湖南農業大學, 2020.
Ji Weiwen. Structural design and experimental study of chassis high gap planter [D]. Changsha: Hunan Agricultural University, 2020.
[14]候志偉. 輪式果園作業平臺性能分析與仿真[D]. 楊凌:西北農林科技大學, 2016.
Hou Zhiwei. Performance analysis and simulation of wheel orchard work platform [D]. Yangling: Northwest A & F University, 2016.
[15]趙宇楠, 司景萍, 王二毛, 等. 基于ANSYS的礦用自卸車車架結構優化設計[J]. 煤礦機械, 2014, 35(3): 18-21.
Zhao Yunan, Si Jingping, Wang Ermao, et al. Structure optimal design of mining dump truck frame based on ANSYS [J]. Coal Mine Machinery, 2014, 35(3): 18-21.
[16]董芒, 顧寶興, 姬長英, 等. 水果采摘機器人智能移動平臺的設計與試驗[J]. 華南農業大學學報, 2016, 37(4): 128-133.
Dong Mang, Gu Baoxing, Ji Changying, et al. Design and experiment of an intelligent mobile platform loaded with a fruit picking robot [J]. Journal of South China Agricultural University, 2016, 37(4): 128-133.
[17]侯鵬龍. 加裝傾斜旋轉器挖掘機工作裝置的靜力學分析[D]. 太原:太原科技大學, 2017.
Hou Penglong. Statics analysis of working device of excavator with tiltrotator [D]. Taiyuan:Taiyuan University of Science and Technology, 2017.
[18]趙艷梅. 基于ANSYS Workbench的某車架有限元分析及輕量化研究[D]. 鄭州:鄭州大學, 2018.
Zhao Yanmei. Finite element analysis and lightweight research of a frame based on ANSYS Workbench [D]. Zhengzhou:Zhengzhou University, 2018.
[19]陳樹人, 韓紅陽, 陳剛, 等. 噴桿噴霧機機架動態特性分析與減振設計[J]. 農業機械學報, 2013, 44(4): 50-53, 20.
Chen Shuren, Han Hongyang, Chen Gang, et al. Dynamic characteristic analysis and vibration reduction design for sprayer frame [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 50-53, 20.