基于三自由度運(yùn)動(dòng)平臺(tái)的運(yùn)動(dòng)姿態(tài)數(shù)據(jù)采集研究
2024-07-01 04:42:49林鵬
機(jī)電信息 2024年12期
關(guān)鍵詞:數(shù)據(jù)采集
摘要:根據(jù)三自由度運(yùn)動(dòng)平臺(tái)的原理和結(jié)構(gòu),面向市場(chǎng)需求,研究設(shè)計(jì)了一款三自由度運(yùn)動(dòng)平臺(tái)數(shù)據(jù)采集裝置,可以廣泛應(yīng)用于5D影院、軌道影院、仿真模擬駕駛、飛行駕駛模擬、航海駕駛模擬、虛擬現(xiàn)實(shí)動(dòng)感體驗(yàn)等領(lǐng)域,具有很高的市場(chǎng)價(jià)值。
關(guān)鍵詞:三自由度;運(yùn)動(dòng)平臺(tái);數(shù)據(jù)采集
中圖分類號(hào):TH122? ? 文獻(xiàn)標(biāo)志碼:A? ? 文章編號(hào):1671-0797(2024)12-0032-04
DOI:10.19514/j.cnki.cn32-1628/tm.2024.12.008
0? ? 引言
三自由度運(yùn)動(dòng)平臺(tái)是一種空間并聯(lián)運(yùn)動(dòng)機(jī)構(gòu),它由三只電動(dòng)缸,上下各六只萬向鉸鏈和上下兩個(gè)平臺(tái)組成,下平臺(tái)固定在基礎(chǔ)上,借助三只電動(dòng)缸的伸縮運(yùn)動(dòng),完成上平臺(tái)在空間三個(gè)自由度(X,Y,Z)的俯仰、滾轉(zhuǎn)、升降運(yùn)動(dòng),從而可以模擬出各種空間運(yùn)動(dòng)姿態(tài)。
由于并聯(lián)機(jī)構(gòu)的參數(shù)復(fù)雜性,其動(dòng)力學(xué)模型通常是一個(gè)多自由度、多變量、高度非線性、多參數(shù)耦合的復(fù)雜系統(tǒng)。同時(shí),動(dòng)力學(xué)分析又是對(duì)整個(gè)系統(tǒng)實(shí)施有效的控制策略達(dá)到既定運(yùn)動(dòng)指標(biāo)的基礎(chǔ),所以有必要對(duì)系統(tǒng)動(dòng)力學(xué)模型的建立進(jìn)行深入分析研究。此外,三自由度并聯(lián)機(jī)構(gòu)作為少自由度空間機(jī)構(gòu)的一種形式,由于自由度受限,其運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)分析方法也與常見的六自由度運(yùn)動(dòng)平臺(tái)有所不同。因此,對(duì)其進(jìn)行更進(jìn)一步的理論分析和實(shí)際制造安裝生產(chǎn)前的仿真、實(shí)驗(yàn)研究,為工程實(shí)現(xiàn)奠定良好的基礎(chǔ)是很有必要的[1]。
目前,三自由度運(yùn)動(dòng)平臺(tái)多應(yīng)用于仿真模擬試驗(yàn),它具有明顯的安全性、經(jīng)濟(jì)性、可操作性,不受場(chǎng)地和氣象條件的限制,效率高,加之驅(qū)動(dòng)關(guān)節(jié)少、性價(jià)比高等優(yōu)點(diǎn),因而被廣泛應(yīng)用于各種訓(xùn)練模擬器如飛行模擬器、艦艇模擬器、海軍直升機(jī)起降模擬平臺(tái)、坦克模擬器、汽車駕駛模擬器、火車駕駛模擬器、地震模擬器以及動(dòng)感電影、娛樂設(shè)備、機(jī)構(gòu)力加載等領(lǐng)域,為提高我國的仿真技術(shù)水平,增強(qiáng)國防實(shí)力,提高工業(yè)生產(chǎn)力水平,做出了巨大貢獻(xiàn)。
1? ? 三自由度運(yùn)動(dòng)平臺(tái)結(jié)構(gòu)及原理
三自由度運(yùn)動(dòng)平臺(tái)作為一種空間并聯(lián)運(yùn)動(dòng)機(jī)構(gòu)被廣泛應(yīng)用于航空航天、航海艦船、飛機(jī)工業(yè)、機(jī)床業(yè)和車輛工業(yè)等領(lǐng)域的駕駛模擬、飛行模擬、虛擬現(xiàn)實(shí)等方面,在國防和民用領(lǐng)域都有很高的研究和應(yīng)用價(jià)值。
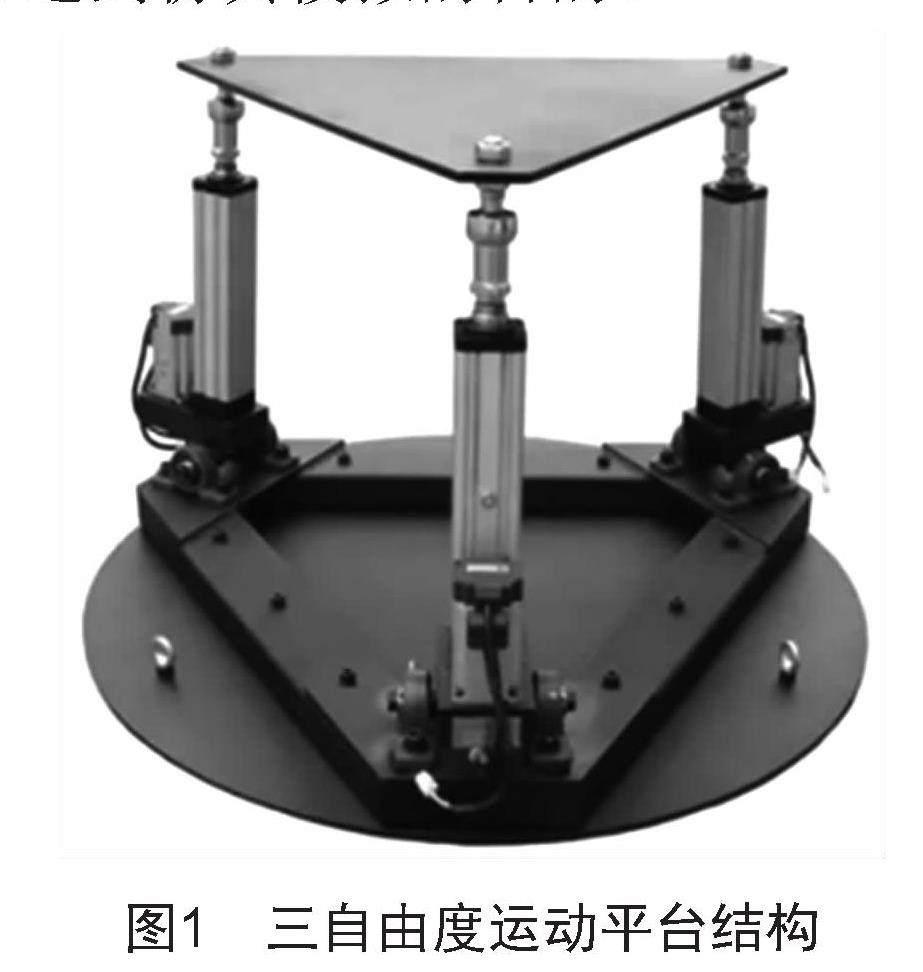
三自由度運(yùn)動(dòng)平臺(tái)結(jié)構(gòu)(圖1)是由一個(gè)上平臺(tái)(動(dòng)平臺(tái))、一個(gè)下平臺(tái)(固定底座)、三個(gè)支桿、三個(gè)線性作動(dòng)器(伺服電動(dòng)缸)及若干關(guān)節(jié)連接而成。上平臺(tái)為運(yùn)動(dòng)平臺(tái),承受負(fù)載,完成既定規(guī)格參數(shù)的速度、加速度、位置運(yùn)動(dòng)要求,進(jìn)而實(shí)現(xiàn)對(duì)于場(chǎng)景畫面運(yùn)動(dòng)姿態(tài)的仿真模擬,從而把業(yè)務(wù)場(chǎng)景視感與體感結(jié)合起來,達(dá)到仿真模擬的目的。
通過三自由度運(yùn)動(dòng)平臺(tái)結(jié)構(gòu)(圖1)可以得出:上運(yùn)動(dòng)平臺(tái)與地面之間以三個(gè)支桿來約束并起支撐作用,以三個(gè)線性作動(dòng)器(伺服電動(dòng)缸)作為驅(qū)動(dòng)部件進(jìn)行驅(qū)動(dòng)。每個(gè)線性作動(dòng)器兩端為關(guān)節(jié)軸承,中間為一個(gè)移動(dòng)副和一個(gè)轉(zhuǎn)動(dòng)副連接,每根支桿兩端也是采用關(guān)節(jié)軸承分別與地面和上平臺(tái)相連。通過計(jì)算可知,每個(gè)支桿所在的支路都具有5個(gè)自由度,每個(gè)支路對(duì)上平臺(tái)提供一個(gè)約束;每個(gè)線性作動(dòng)器所在的支路都具有6個(gè)自由度,對(duì)于上平臺(tái)沒有約束。通過每個(gè)分支對(duì)上平臺(tái)的約束很容易計(jì)算得出其自由度為3。因此,通過三套線性作動(dòng)器的驅(qū)動(dòng),上平臺(tái)就能夠?qū)崿F(xiàn)對(duì)于給定運(yùn)動(dòng)的跟蹤復(fù)現(xiàn)。
簡單直觀地對(duì)運(yùn)動(dòng)進(jìn)行分析可得到:由于三根支桿的限制作用,上平臺(tái)平動(dòng)受到限制;而轉(zhuǎn)動(dòng)自由度相對(duì)更為自由,運(yùn)動(dòng)范圍更大。當(dāng)兩豎直作動(dòng)器差動(dòng)動(dòng)作、水平作動(dòng)器不動(dòng)作時(shí),實(shí)現(xiàn)橫滾運(yùn)動(dòng);兩豎直作動(dòng)器同步動(dòng)作、水平作動(dòng)器不動(dòng)作時(shí),實(shí)現(xiàn)俯仰動(dòng)作;兩豎直作動(dòng)器不動(dòng)作、水平作動(dòng)器動(dòng)作時(shí)實(shí)現(xiàn)偏航[1];三套作動(dòng)器任意動(dòng)作實(shí)現(xiàn)任意擺動(dòng),從而實(shí)現(xiàn)對(duì)各種業(yè)務(wù)場(chǎng)景的仿真模擬。
上述平臺(tái)在完成既定動(dòng)作的前提下有其自身結(jié)構(gòu)上的優(yōu)點(diǎn):
1)由于三個(gè)支桿的限制支撐作用,相對(duì)于其他同樣實(shí)現(xiàn)三個(gè)方向轉(zhuǎn)動(dòng)的并聯(lián)機(jī)構(gòu),整個(gè)平臺(tái)機(jī)構(gòu)剛度更大;
2)相對(duì)于六自由度機(jī)構(gòu)結(jié)構(gòu)更為緊湊,更為經(jīng)濟(jì)適用,而且由于作動(dòng)器沿運(yùn)動(dòng)垂直向作用,能夠在得到相同輸出功率的前提下使作動(dòng)器尺寸最小;
3)根據(jù)上面的運(yùn)動(dòng)分析,平臺(tái)結(jié)構(gòu)模型相對(duì)簡單,更易于實(shí)現(xiàn)控制。
總而言之,三自由度平臺(tái)是一種具有三個(gè)獨(dú)立自由度的機(jī)電系統(tǒng),通過控制其旋轉(zhuǎn)關(guān)節(jié)或轉(zhuǎn)動(dòng)軸的運(yùn)動(dòng),可以實(shí)現(xiàn)平臺(tái)在三個(gè)方向上的運(yùn)動(dòng)和定位。
三自由度運(yùn)動(dòng)平臺(tái)在機(jī)器人、模擬器和虛擬現(xiàn)實(shí)等領(lǐng)域有廣泛的應(yīng)用,其具備極大的市場(chǎng)應(yīng)用價(jià)值,主要體現(xiàn)在:
首先,經(jīng)濟(jì)性。制造一臺(tái)模擬器的價(jià)格要比制造真實(shí)的飛機(jī)、輪船、潛艇、戰(zhàn)車等經(jīng)濟(jì)得多,而且可以不受天氣影響自如地進(jìn)行實(shí)驗(yàn)。
其次,安全性。例如飛行模擬,很多異常情況在真實(shí)的飛行中是很危險(xiǎn)的,通過模擬器對(duì)飛行員進(jìn)行訓(xùn)練,進(jìn)而使其更好地掌握處理異常情況的能力,相對(duì)于在真實(shí)飛機(jī)中進(jìn)行飛行訓(xùn)練來說更為安全;對(duì)于沒有經(jīng)驗(yàn)的新駕駛員來說,通過模擬器的訓(xùn)練可以掌握基本操作技巧;很多實(shí)際設(shè)備的設(shè)計(jì)錯(cuò)誤可以通過模擬器的實(shí)驗(yàn)?zāi)M進(jìn)行分析,進(jìn)而得到改進(jìn)。
再次,就是對(duì)于環(huán)境方面的考慮。正常飛行、車輛行駛等都需要燃燒大量的煤油,這樣就給環(huán)境帶來了沉重的負(fù)擔(dān),有了模擬設(shè)備就可以節(jié)省能源,同時(shí)也減輕了科技發(fā)展對(duì)于環(huán)境帶來的負(fù)面影響。
2? ? 三自由度運(yùn)動(dòng)平臺(tái)運(yùn)動(dòng)姿態(tài)數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
隨著三自由度運(yùn)動(dòng)平臺(tái)在各個(gè)領(lǐng)域的廣泛應(yīng)用,有時(shí)需要針對(duì)業(yè)務(wù)場(chǎng)景畫面,采集畫面姿態(tài)數(shù)據(jù),這時(shí)就需要設(shè)計(jì)一種三自由度結(jié)構(gòu)的運(yùn)動(dòng)平臺(tái)數(shù)據(jù)采集裝置。
但怎么讓三自由度平臺(tái)按照預(yù)想的姿態(tài)運(yùn)行、進(jìn)行仿真模擬,并完成運(yùn)行姿態(tài)數(shù)據(jù)采集分析再編輯處理,能夠生成需求的業(yè)務(wù)場(chǎng)景數(shù)據(jù),從而可以在軟件里回放采集的業(yè)務(wù)場(chǎng)景數(shù)據(jù),實(shí)現(xiàn)對(duì)業(yè)務(wù)場(chǎng)景的復(fù)現(xiàn),以滿足特定業(yè)務(wù)場(chǎng)景的測(cè)試和應(yīng)用?這時(shí)就需要設(shè)計(jì)一款面向業(yè)務(wù)場(chǎng)景的三自由度結(jié)構(gòu)的運(yùn)動(dòng)平臺(tái)數(shù)據(jù)采集系統(tǒng)。
采集系統(tǒng)設(shè)計(jì)要求:采集裝置效率高、靈敏度高、時(shí)鐘準(zhǔn)確,操作簡單,運(yùn)行穩(wěn)定。
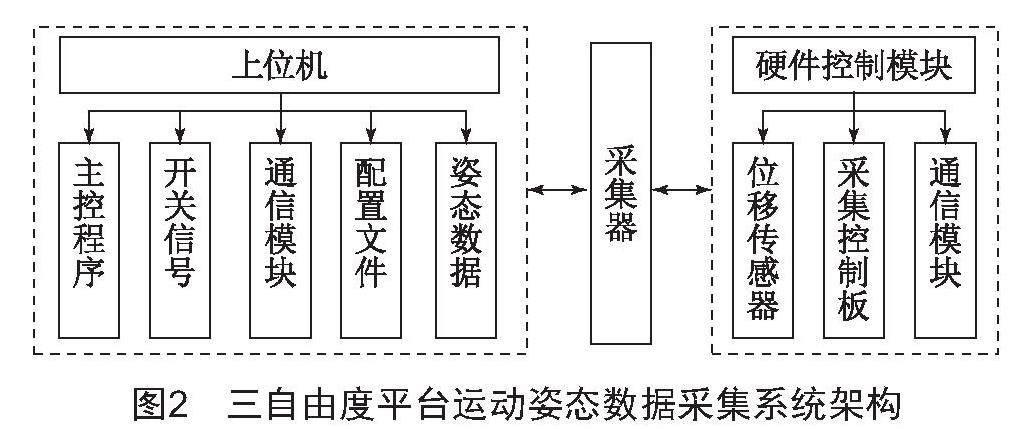
為提高三自由度平臺(tái)運(yùn)行姿態(tài)數(shù)據(jù)采集裝置的效率和靈敏度,增加功能,本采集系統(tǒng)在設(shè)計(jì)上充分考慮了各種需求、功能接口,要求生產(chǎn)出來的采集裝置,各方面的指標(biāo)參數(shù)滿足設(shè)計(jì)要求,功能、性能大幅提升,整個(gè)采集裝置操作簡單高效。三自由度平臺(tái)運(yùn)動(dòng)姿態(tài)數(shù)據(jù)采集系統(tǒng)架構(gòu)如圖2所示。
系統(tǒng)分為軟件部分和硬件部分,軟件部分為上位機(jī)軟件采集系統(tǒng),硬件部分主要為采集器和采集控制板。上位機(jī)軟件采集系統(tǒng)實(shí)現(xiàn)通信定義、文件配置、采集的開關(guān)指令,生成姿態(tài)數(shù)據(jù)。硬件部分包括三自由度模擬采集機(jī)構(gòu)、位移傳感器、采集控制板、與上位機(jī)通信模塊。
操作者配置完配置文件和通信設(shè)置后,根據(jù)業(yè)務(wù)場(chǎng)景畫面,以第一視角手搖采集器,打開采集開關(guān)進(jìn)行數(shù)據(jù)采集,生成業(yè)務(wù)場(chǎng)景的畫面姿態(tài)數(shù)據(jù),畫面結(jié)束時(shí),關(guān)閉采集按鈕,采集結(jié)束,生成姿態(tài)數(shù)據(jù)文件。
采集的平臺(tái)姿態(tài)數(shù)據(jù),通過上位機(jī)的主控程序加載到內(nèi)存中,同時(shí)啟動(dòng)業(yè)務(wù)場(chǎng)景畫面,按照采集時(shí)鐘,定時(shí)發(fā)送數(shù)據(jù)姿態(tài)指令給三自由度運(yùn)動(dòng)平臺(tái),從而把業(yè)務(wù)場(chǎng)景畫面的姿態(tài)和三自由度運(yùn)動(dòng)平臺(tái)的運(yùn)動(dòng)姿態(tài)同步起來,實(shí)現(xiàn)視覺和體感的匹配,最終使仿真模擬效果實(shí)現(xiàn)最大化。
3? ? 三自由度運(yùn)動(dòng)平臺(tái)運(yùn)動(dòng)姿態(tài)數(shù)據(jù)采集系統(tǒng)實(shí)現(xiàn)
3.1? ? 運(yùn)動(dòng)姿態(tài)數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)功能
1)系統(tǒng)結(jié)構(gòu)簡單、合理。2)操作簡便,一個(gè)人即可完成全部操作。3)軟件穩(wěn)定、可靠。4)數(shù)據(jù)采集精度高,時(shí)鐘精準(zhǔn)無誤差。5)支持MODBUS通信,也可通過網(wǎng)卡實(shí)時(shí)采集。6)支持多自由度的動(dòng)作姿態(tài)采集。7)最多支持12路的特效輸出定義。8)可根據(jù)客戶需求,對(duì)軟件進(jìn)行實(shí)際定制和修改。9)支持1 ms的動(dòng)作采集,數(shù)據(jù)不丟幀。
3.2? ? 運(yùn)動(dòng)姿態(tài)數(shù)據(jù)采集裝置結(jié)構(gòu)說明
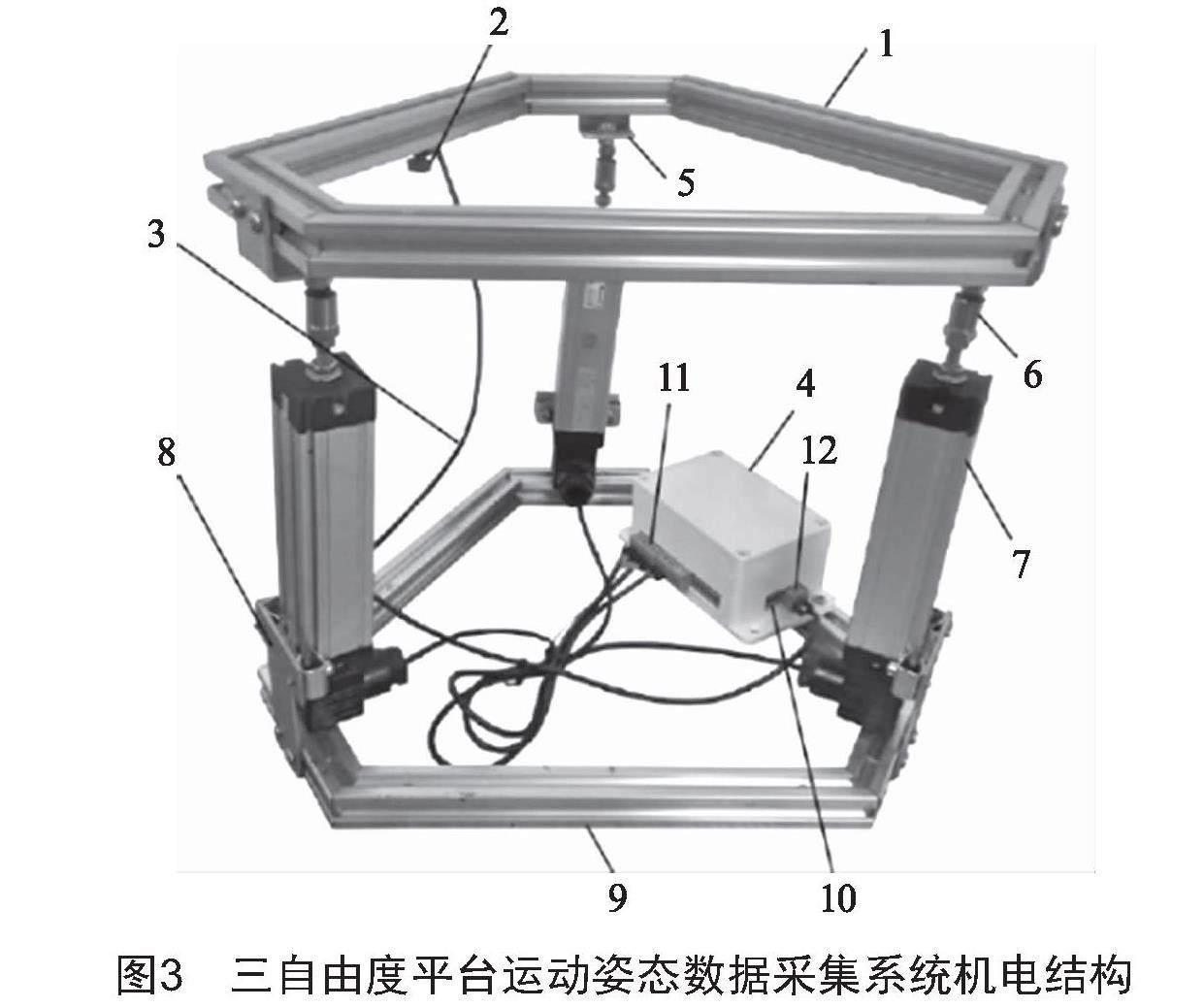
三自由度平臺(tái)運(yùn)動(dòng)姿態(tài)數(shù)據(jù)采集系統(tǒng)機(jī)電結(jié)構(gòu)如圖3所示。
1)上平面框架。2)采集開關(guān)按鈕,位于上平面框架長邊的中央,與下框架長邊中央的采集控制板通信。3)開關(guān)信號(hào)通信線。4)采集控制板。5)上平面框架T型鉸接件。6)魚眼軸承,與上平面框架T型鉸接件一起,連接上平面框架與直線位移傳感器。7)位移傳感器,產(chǎn)生直線位移數(shù)據(jù),與下平面框架T型鉸接件連接。8)下平面框架T型鉸接件。9)下平面框架。10)通信端口,通過通信線與電腦進(jìn)行通信。11)位移傳感器通信口,通過位移傳感器通信線與控制板進(jìn)行通信。12)開關(guān)信號(hào)通信口,通過開關(guān)通信線與控制板進(jìn)行通信。
3.3? ? 運(yùn)動(dòng)姿態(tài)數(shù)據(jù)采集系統(tǒng)采集控制板設(shè)計(jì)
運(yùn)動(dòng)姿態(tài)數(shù)據(jù)采集系統(tǒng)采集控制板結(jié)構(gòu)如圖4所示。
1)編號(hào)10(對(duì)應(yīng)圖3)為采集控制板與電腦上位機(jī)軟件進(jìn)行通信的通信端口,同時(shí)電腦通過該端口為采集控制板供電。
2)編號(hào)11(對(duì)應(yīng)圖3)為位移傳感器與采集控制板的通信端口,采集控制板采集位移數(shù)據(jù),把采集到的位移數(shù)據(jù)發(fā)送給上位機(jī)主控程序,最多可支持6路位移信號(hào)的數(shù)據(jù)采集。
3)編號(hào)12(對(duì)應(yīng)圖3)為開關(guān)信號(hào)通信端口,采集控制板第一次收到開關(guān)信號(hào)指令,打開內(nèi)置系統(tǒng)時(shí)鐘,定時(shí)采集位移數(shù)據(jù),再次按下開關(guān)信號(hào),關(guān)閉內(nèi)置系統(tǒng)時(shí)鐘,結(jié)束位移數(shù)據(jù)采集。
3.4? ? 運(yùn)動(dòng)姿態(tài)數(shù)據(jù)采集系統(tǒng)上位機(jī)軟件設(shè)計(jì)
運(yùn)動(dòng)姿態(tài)數(shù)據(jù)采集系統(tǒng)上位機(jī)主控程序界面設(shè)計(jì)如圖5所示。
上位機(jī)主控程序?qū)崿F(xiàn)的功能:
1)配置文件:通信參數(shù)、對(duì)應(yīng)的位移行程,采集時(shí)鐘,姿態(tài)數(shù)據(jù)文件名和文件輸出路徑。
2)在操作者按動(dòng)開關(guān)按鈕后,上位機(jī)軟件程序接收到采集控制板發(fā)送的開始指令。
3)上位機(jī)通信模塊收到開始指令,打開通信端口,接收采集控制板發(fā)送的姿態(tài)數(shù)據(jù)。
4)上位機(jī)主控程序接收到姿態(tài)數(shù)據(jù),在配置文件中定義的文件目錄路徑下生成姿態(tài)數(shù)據(jù)文件。
5)再次按下開關(guān)按鈕,控制板發(fā)出停止指令。
6)上位機(jī)通信模塊收到停止指令,關(guān)閉通信端口,采集控制板停止位移姿態(tài)數(shù)據(jù)采集,上位機(jī)主控程序停止接收姿態(tài)數(shù)據(jù)。
7)上位機(jī)主控程序姿態(tài)數(shù)據(jù)文件關(guān)閉,保存到配置文件中定義的文件輸出路徑。
8)姿態(tài)數(shù)據(jù)文件設(shè)計(jì)冗余12路開關(guān)量指令,可以根據(jù)業(yè)務(wù)需求,對(duì)姿態(tài)數(shù)據(jù)文件進(jìn)行再編輯處理,從而達(dá)到設(shè)計(jì)需求。
4? ? 結(jié)束語
本文介紹了三自由度運(yùn)動(dòng)平臺(tái)的結(jié)構(gòu)及原理,面向市場(chǎng)需求,設(shè)計(jì)開發(fā)了三自由度運(yùn)動(dòng)平臺(tái)運(yùn)動(dòng)姿態(tài)數(shù)據(jù)采集裝置。該裝置按照三自由度平臺(tái)的結(jié)構(gòu)制造,方式靈活多樣,采用位移傳感器來表達(dá)三自由度平臺(tái)的線性執(zhí)行作動(dòng)。開發(fā)了一款采集控制板,實(shí)現(xiàn)對(duì)位移傳感器的數(shù)據(jù)采集,并上傳給上位機(jī)軟件,上位機(jī)軟件通過通信模塊收到姿態(tài)數(shù)據(jù)后,保存到電腦指定的文件路徑,最終實(shí)現(xiàn)預(yù)期的三自由度運(yùn)動(dòng)平臺(tái)運(yùn)動(dòng)姿態(tài)數(shù)據(jù)采集。
該采集裝置可以實(shí)現(xiàn)精度到1 ms的時(shí)鐘采集,反應(yīng)靈敏,數(shù)據(jù)采集精度高,可擴(kuò)展性強(qiáng),操作簡便,可廣泛應(yīng)用于5D影院、軌道影院、三自由度運(yùn)動(dòng)平臺(tái)等業(yè)務(wù)場(chǎng)景和姿態(tài)隨機(jī)測(cè)試方向,具有很高的應(yīng)用價(jià)值和市場(chǎng)價(jià)值。
[參考文獻(xiàn)]
[1] 陳安平.三自由度運(yùn)動(dòng)平臺(tái)系統(tǒng)建模與分析[D].哈爾濱:哈爾濱工業(yè)大學(xué),2005.
收稿日期:2024-03-04
作者簡介:林鵬(1974—),男,河南新安人,工程師,研究方向:機(jī)械電子工程、計(jì)算機(jī)、自動(dòng)化、數(shù)字媒體技術(shù)。
猜你喜歡
現(xiàn)代電子技術(shù)(2016年22期)2016-12-26 12:36:15
電子技術(shù)與軟件工程(2016年22期)2016-12-26 11:11:30
現(xiàn)代電子技術(shù)(2016年22期)2016-12-26 09:44:35
電子技術(shù)與軟件工程(2016年19期)2016-12-19 19:59:14
電腦知識(shí)與技術(shù)(2016年27期)2016-12-15 20:42:01
農(nóng)業(yè)與技術(shù)(2016年15期)2016-11-09 17:43:03
科技視界(2016年18期)2016-11-03 22:51:40
中國科技博覽(2016年22期)2016-11-01 16:58:26
軟件工程(2016年8期)2016-10-25 15:54:18
軟件工程(2016年8期)2016-10-25 15:52:53
