雙輪轂電機驅動力矩在線分配控制方法研究
2024-07-02 16:29:20吳石車翠茹管詣博
哈爾濱理工大學學報 2024年1期
吳石 車翠茹 管詣博

摘 要:針對雙輪轂電機驅動汽車的高效低耗能問題,提出一種考慮雙輪轂電機驅動力矩在線實時反饋的優化方法。首先,建立輪轂電機能耗模型、動力學模型以及轉矩分配控制模型;其次,以輪轂電機驅動效率為目標,以輪轂電機轉矩、轉速和能耗為不等式約束,建立基于加入異變序列的QPSO-LSTM算法的優化模型;最后,搭建LabVIEW軟件實驗平臺,使輪轂電機在716N·m轉矩峰值和1000r/min轉速峰值的約束條件下穩定輸出。結果表明,軟件平臺可實時監測并調整驅動車輛系統數據,在FTP-75工況下,加入異變序列的QPSO-LSTM算法比量子遺傳算法和粒子群算法的單循環能耗分別降低了298%和464%;在CLTC-P工況下,單循環能耗分別降低了306%和481%。
關鍵詞:輪轂電機;驅動效率;轉矩分配;長短期記憶神經網絡;粒子群算法
DOI:1015938/jjhust202401002
中圖分類號: TH132? 文獻標志碼: A
文章編號: 1007-2683(2024)01-0013-12
Research on On-line Distribution Control Method of Driving Torque of Dual Hub Motor
WU Shi, CHE Cuiru, GUAN Yibo
(School of Mechanical Engineering, Harbin University of Science and Technology, Harbin 150080,China)
Abstract:Aiming at the problem of high efficiency and low energy consumption of vehicle driven by dual hub motor, an optimization method considering the online real-time feedback of driving distance of dual hub motor was proposed Firstly, the hub motor energy consumption model, dynamics model and torque distribution control model are established Secondly, an optimization model based on QPSO-LSTM algorithm with variable sequence was established by taking the driving efficiency of wheel motor as the objective and taking the torque and speed limit of wheel motor as inequality constraints Finally, the LabVIEW software experimental platform was built to make the hub motor output stably under the constraints of torque peak value of 716n m and speed peak value of 1000r/min Experimental results show that the software platform can monitor and adjust the driving vehicle system data in real time In FTP-75 condition, the QPSO-LSTM algorithm with the addition of heterogeneous sequences reduces the single-cycle energy consumption by 298% and 464%, respectively, compared with the quantum genetic algorithm and the particle swarm algorithm in the FTP-75 operating condition, and by 306% and 481%, respectively, in the CLTC-P operating condition
Keywords:hub motor; power efficiency; torque distribution; LSTM; PSO
0 引 言
針對輪轂電機驅動汽車的整車經濟性,輪轂內部電機的負載能耗占主要部分,提高輪轂電機的能量利用率可以有效提高輪轂獨立驅動汽車的整車效率,使整車能量利用最大化;如何利用能耗優化算法提高輪轂電機的有效轉矩輸出,實現輪轂電機能量的精準控制是控制能耗的重要研究方向。
國內外對于輪轂電機的能耗研究已經有了相應的成果,徐向陽等[1]考慮了輪胎縱橫兩個方向的滑移能耗,建立雙層控制模型,針對不同條件域內的情況分別進行控制,在降低能耗的過程中考慮了整車的穩定性。褚紅等[2]考慮了輪轂電機動力傳遞的能量損失和整車輪胎滑移的能量損失。Chen等[3]考慮了外界道路環境引起的能量損失,建立路況與道路交通模型,利用動態規劃算法優化目標車速與實時轉矩,提高車輛輪轂電機的效率。Fan J等[4]考慮三電機獨立驅動電動車,利用數學模型解決驅動力矩的再分配問題。通過仿真測試表明,驅動力矩的分配系數矩陣經過優化,獨立驅動電機效率得到提高。谷成等[5]考慮了電動輪汽車驅動系統的能耗,考慮整車系統中輪轂電機、輪邊電機及減速器等主要部件的效率特性與輸出特性,以整車能耗最小為優化目標的非線性問題。在線查表取用力矩分配系數的最優值后進行實車測試。上述關于輪轂電機效率的研究,主要是通過綜合考慮整車外部與內部環境因素,通過仿真驗證和查表實車驗證,但是針對輪轂電機本身負載變化時的實時控制尚未深入研究。
輪轂電機的能耗離不開算法的優化和控制,Eto R等[6]考慮四電機獨立驅動車輛,基于車輪能量損失的驅動力分配方法,通過將能量損失比的平方和最小化,減少汽車能耗,并通過試驗驗證了該方法的有效性。Dizqah A M等[7]將轉矩分配轉化為受車速影響的參數優化問題。采用仿真和實驗兩者同時進行算法驗證。Yi Hsiang等[8]采用深度強化學習深度確定性策略梯度(DDPG)算法對轉向過程中的轉矩分配進行優化。王博等[9]考慮電機獨立驅動汽車正常驅動狀態和電機系統失效狀態兩種情況,提出了一種基于控制分配的車輛驅動力分配算法,實現驅動力矩的優化再分配。陳辛波等[10]考慮傳動系統傳遞效率問題,建立驅動力矩分配控制模型,完成改善汽車經濟性的目標。羅立全等[11]考慮輪邊電機驅動客車的經濟性問題,通過對加速踏板進行平滑處理與考慮電機效率的優化算法結合的方式,進行能耗優化,利用硬件在環的方式進行仿真驗證,整車能耗得到大幅度降低。姜濤等[12]考慮了前后電機總損失功率,在此基礎上進行驅動力距的能耗優化,建立了汽車驅動的功率消耗模型,對模型進行仿真的試驗分析。上述研究針對特殊工況提出相應優化算法進行轉矩分配控制,但是針對城市復雜工況下輪轂電機能量利用率的實驗驗證未做考慮。
本文以分布式前驅汽車為研究對象,首先,建立輪轂電機的動力學特性和魯棒預測的穩定控制模型;其次,建立以輪轂電機最高驅動效率為轉矩分配的目標函數,在考慮電機轉矩、轉速和能耗以及輪轂電機效率的前提下,以電池剩余電量為能耗評價指標,建立輪轂電機優化模型;最后,基于LabVIEW平臺的人機交互功能進行實驗驗證,在輪轂電機穩定輸出的基礎上,對比QSPO-LSTM優化算法與粒子群優化算法以及改進的量子遺傳算法的轉矩分配結果,并對結果進行分析。
1 輪轂電機轉矩分配控制模型
輪轂電機轉矩分配是在考慮輪轂電機實時工作情況下,電機高效率運轉情況下盡可能滿足動力需求,完成對2個電機轉矩指令的計算[13],合理分配輪轂負載,提高電機效率,達到提高能量利用率的目的。本質上是含約束的非線性優化問題。
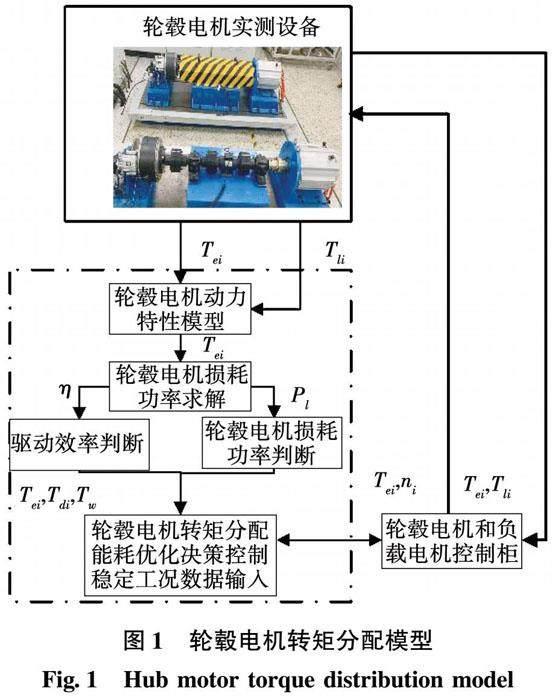
為研究輪轂電機轉矩分配方法,建立轉矩分配控制模型,如圖1所示。轉矩分配模型包括輪轂電機動力特性模型,電池SOC模型。
11 輪轂電機能耗模型
因輪轂電機及其驅動系統在輪轂電機同一轉速,不同轉矩下,效率并不恒定[12]。需查詢輪轂電機效率模型,從而為基于輪轂電機能耗的轉矩分配優化提供依據。本文所研究的輪轂電機具體參數如表1所示。
由于輸出轉矩和汽車慣性力造成的旋轉阻力,輪轂產生速度,故建立單個輪轂電機動力特性模型如式(1)~(4)所示:
Tei-Tli=Jwii(1)
Tei=KtIei(2)
Tdi=KtIdi(3)
Ei-RiIei=LaiI·ei(4)
式中:Te為輪轂電機驅動輪轂轉動的驅動力距;Tl為輪轂電機負載轉矩,由實車(車輛仿真模型)提供;Jω為輪轂電機車輪總成轉動慣量;ω為車輪的轉動角速度;Td為控制器目標力矩;Kt為力矩系數;Id為目標電流;Ie為實際電流;R為輪轂電機內阻;La為輪轂電機電感;E為輪轂電機輸入電壓;i=1~2為兩個輪轂電機。
輪轂電動機效率與轉速、轉矩之間的函數關系是根據電機實測數據形成表格存儲到控制器里面,實時查表得出當前轉速轉矩下的電機效率,根據所得到的電機效率來計算出相應的能量損耗。實驗時在LabVIEW中建立數據庫,實驗時根據電機轉速、轉矩得到電機效率。
在輪轂電機的運轉過程中,輪轂電機的功率因為電機內部結構配置會造成一定的損失,根據電機效率與電機動力特性建立驅動工況輪轂電機輸出功率模型如式(5)所示:
Pl=∑2i=1[(Tei-Tli)ni](5)
式中:Pl為輪轂電機的損失功率;ni為各輪轂電機轉矩、轉速;ηi為當前工作狀態下的輪轂電機效率。
12 輪轂動力學模型
輪轂電機驅動輪轂在運轉過程中,驅動力距要足以克服負載阻力距:
總需求縱向轉矩為
Tre=∑2i=1Ti=Te-Tl (6)
總需求橫擺轉矩為
T2-T1RB12cosθ=Tw(7)
式中:Ti(i=1,2)為各輪轂電機轉矩;θ為前輪轉向角;B1為前軸長度;a為前軸到質心長度;Tw為由最優轉向決定的輪轂電機橫擺轉矩需求。
13 輪轂電機轉矩分配控制模型
輪轂電機作為動力裝置,當受到的力發生改變時,輸出轉矩也會發生改變,與此同時會產生附加橫擺力矩,車輛控制單元會根據車輛運行狀況和輪轂電機運行狀態和自身結構限制完成附加橫擺力矩的分配使車輛保持穩定運行,輪轂電機縱向力和橫擺力矩約束方程如式(8)所示:
T1γ1R+T2γ2R=TreR
LlT2γ22R-LrT1γ12R=ΔM(8)
式中:Tre為輪轂電機總需求縱向轉矩;L為兩輪轂電機左右輪距;R為輪轂實際半徑;ΔM為附加橫擺力矩;γ為輪轂電機失效系數,其中,γ=1時電機正常運轉,γ=0時電機失效。
在轉矩分配過程中,輪轂電機縱向力和附加橫擺力矩為控制目標,將輪轂電機失效系數引入轉矩分配控制算法,兩個輪轂電機轉矩為控制輸入,完成輪轂電機特殊工作狀態的轉矩分配控制,控制邏輯如圖2所示。
14 電池模型
輪轂電機由電池組提供電源。由式(4)可得到輪轂電機輸出功率與電池電流之間的關系如式(9)所示:
Po(t)=E(SOC)Ie(t)-RI2e(t)=LaI·eIe(t)(9)
式中:Po(t)為輪轂電機輸出功率。
電流Ie(t)由公式(4),(9)聯合推導得到,如式(10)所示:
Ie(t)=E(SOC)-E2(SOC)-4Po2R(10)
由此得到電池SOC,并作為經濟性評價指標,如式(11)所示:
SOC(t)=SOC0-∫t0ηqIe(t)dtQbat(11)
式中:SOC0為電池初始SOC值,取100%;Qbat為動力電池容量,取156Ah;ηq為電池的充放電效率。
充放電效率分別為
ηq=ηd=E-IeRE=121+1-4RPoE2,Pi≥0
ηc=EE-IeR=2/1+1-4RPoE2,Pi<0(12)
式中:ηd為放電效率;ηc為充電效率;Pi為電池組功率。
2 轉矩分配系數優化模型
21 優化模型建立
輪轂電機在式(5)所示的輸出功率下進行能耗優化,以最大驅動效率為目標函數,根據式(2),(3)可以推出最大驅動效率如式(13)所示:
maxη=IdnI1nη1+I2nη2(13)
輪轂電機轉矩分配實際上是以輪轂電機能耗和驅動效率為目標,以輪轂電機自身限制為約束,現加入罰函數對其轉矩分配系數進行優化并求解。
基于電機輸出功率模型,加入罰函數,得到考慮電機效率的優化目標函數:
Q1=max(P1),Ti∈[T~min,T~max]max(P1+ε),Ti[T~min,T~max](14)
基于驅動效率模型,加入罰函數,得到考慮系統總能量的優化目標函數:
Q2=max(η),Ti∈[T~min,T~max]max(η+ε),Ti[T~min,T~max](15)
因此,綜合考慮電機動力特性和效率后得到優化目標函數為
Q=max(γ1Q1+γ2Q2)(16)
式中:γ1、γ2為兩個優化目標的權重系數。
輪轂電機需要根據轉矩需求和節能要求進行算法優化,因此,根據輪轂電機動力特性與效率模型后,在以下情況下進行轉矩條件約束:
(Te1+Te2)=Ten≤nmaxTe1≤min(μF1,Tmax(n))Te2≤min(μF2,Tmax(n))Te1,Te2≥Td(17)
式中:Te為實際總轉矩;nmax為輪轂電機最大轉速;μ為工況下的路面附著系數;Tmax為負載電機最大轉矩。
優化規則:當輪轂電機驅動能力滿足公式(8)形成的運動約束時,在輸出轉矩區間中有可行解;而超出運動約束時,輸出轉矩與輪轂電機能力決定的邊界值進行對比,根據輪轂電機的期望目標,就近對實際輸出轉矩進行修正。
22 加入異變序列及其長短期記憶神經網絡的粒子群算法
粒子種群內部加入隨機量,在現有粒子群算法[14]的基礎上,建立慣性因子與算法迭代次數的聯系,改變權重大小;同時結合長短期記憶神經網絡算法,實時改變不同時刻的積分尺度,避免循環過程中梯度消失或梯度爆炸的問題。
221 粒子群算法異變
設定粒子群種群規模為R,下標r表示粒子種群中的第r個粒子,則平均粒子歷史最優位置如式(18)所示:
Rbestr=1R∑Rr=1pbestr(18)
式中:Rbestr為第r個粒子當前的最優位置,pbestr=(pr1,pr2,…,prR)。QPSO算法位置更新時,加入隨機數ε(ε∈(0,1)),粒子r當前的最優位置更新如式(19)所示:
pr+1=εpbestr+(1-ε)gbest(19)
式中:gbest為當前全局最優粒子;pr+1為更新第r個粒子的位置。在粒子更新過程中,按確定的概率對粒子進行異變處理,并隨機對粒子位置進行一個或多個異位處理。
222 粒子群位置更新
處在當前最優位置的粒子進入LSTM網絡運算模型,通過加入輸入門、遺忘門和輸出門限制,優化記憶梯度效果。LSTM神經網絡由多個結構模塊組成,其中Rr-1為該粒子的上一個粒子位置狀態,Pr-1為上一個粒子位置上的輸出,Xr為外部輸入,σ1,σ2,σ3均表示sigmod激活函數,分別對應于LSTM神經網絡的遺忘門、輸入門和輸出門,3個門共同合作,控制和保護粒子群的狀態,tanh層用來產生新的粒子群位置狀態值。
LSTM神經網絡[15]的粒子更新過程如下:
1)粒子中σ1對應LSTM神經網絡中的遺忘門,它決定了從粒子群中丟棄的信息,遺忘門的計算公式如式(20)所示:
ft=σ1(Wf[Pr-1,Xr]+bf)(20)
2)σ2對應LSTM神經網絡輸入門,其對粒子群中的信息進行更新,輸出門計算如式(21)所示:
it=σ2(Wi[Pr-1,Xr]+bi)R′t=tanh(Wc[Pr-1,Xr]+bc)Rt=ftRr-1+itRr(21)
3)輸出門輸出粒子群狀態值,其計算如式(22)所示:
ot=σ3(Wo[Pr-1,Xr]+bo)Pt=ottanh(Rr)(22)
式中:ft為t時刻遺忘門的遺忘信息控制量;it為t時刻輸入門的輸入預測信息控制量;R′t為t時刻的預測候選值;Rt為t時刻輸出;Wf、Wi、Wc、Wo分別為遺忘門,輸入門,細胞更新和輸出門的權重,bf、bi、bc、bo分別遺忘門、輸入門、細胞更新和輸出門的偏置。
223 算法優化流程
在對不同檔位間的轉矩優化過程中,需要將算法嵌入主程序控制策略中,最終得到最佳的運行結果。基于改進的QPSO算法的LSTM網絡優化模型流程如圖3所示。具體流程如下:
開始:
1)初始化種群,種群M進入循環;
2)計算各狀態中粒子適應度,并留下最優值,否則進入下一個循環;
3)得到最優粒子的最佳位置,最為輸入傳遞至LSTM網絡循環中;
4)粒子進入LSTM經過遺忘和細胞更新得到輸出轉矩;
5)輸出轉矩與實際轉矩比較,計算誤差,符合要求則輸出,否則執行下述步驟:
①迭代次數+1;
②對種群M實施一次測量,得到一組狀態R′t;
③對各狀態進行適應度評估;
④依據一定的調整策略,利用LSTM中的遺忘門,輸入門和輸出門對種群進行更新,得到子代種群pr+1;
⑤記錄每一代最佳個體狀態及其適應度值,放入數組;
⑥若數組中的最佳個體狀態連續相等,按遺忘門規律執行操作。僅保留種群中的最優個體,拋棄其余個體,重新生成新個體與之前的最優個體一塊組成新的種群pr+1。
6)將新種群pr+1輸入第2)步,再次進入循環,直到誤差符合條件,輸出。
結束。
3 輪轂電機轉矩能耗優化實驗平臺構建
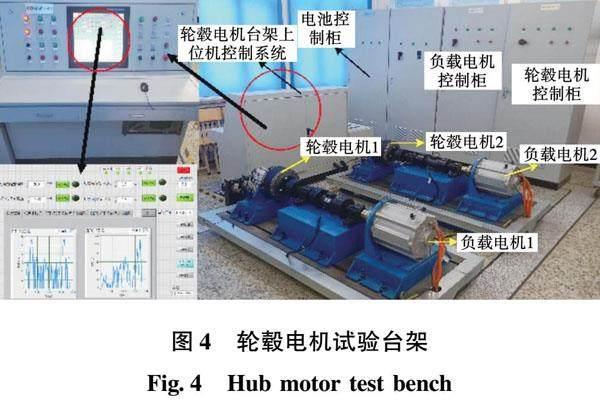
利用圖4所示實驗裝備進行實驗驗證和在線控制。輪轂電機轉矩能耗優化實驗平臺包括輪轂電機臺架控制系統、電池模擬柜、負載電機控制柜、輪轂電機控制柜、輪轂電機和負載電機。
負載電機通過聯軸器與輪轂電機相連,以達到改變輪轂電機負載的目的,扭矩傳感器安裝在兩聯軸器之間,負載電機和輪轂電機控制柜接收上位機控制信號控制啟停,扭矩傳感器、電流傳感器和轉速傳感器通過信號調理后傳輸到EM9639數據采集卡,最后基于LabVIEW軟件平臺[16]對輪轂電機的轉矩優化分配進行試驗驗證與結果分析。
輪轂電機上位機控制柜利用LabVIEW 軟件開發平臺,實現數據處理和實時分析控制功能,其主程序數據監測界面如圖5所示,包括輪轂電機的啟停控制、輪轂電機的轉速輸入、轉矩加載輸入、運行時間、工況選取、參數設置、數據保存以及曲線導出等多個基礎功能控制,除此以外還包括FTP-75工況和NEDC工況下轉矩分配優化結果的曲線監測圖。
主程序由多個子程序模塊組成,包括輪轂電機動力模型的建立,輪轂電機功率損耗模型的建立,轉矩分配算法優化的求解,電池SOC的顯示。如圖6所示。圖6為輪轂電機的優化模型,其中輪轂電機動力特性模塊通過對式(1)~(4)中的電流電壓信號通過DAQ助手完成采集,通過物理通道的選取,完成兩個輪轂電機對應電流傳感器信號的輸入,然后通過DAQ讀取函數完成對數據的讀取。輪轂電機功率損耗模型通過采集輪轂電機轉速信號的頻率得到轉速大小,然后通過文本輸入的方式分別輸入FTP-75(美國的一種認證工況)和CLTC-P(中國乘用車工況)數據,輸入后根據輸入數據擬合輪轂電機效率函數,并根據此效率函數進行輪轂電機損耗功率的求解。轉矩分配算法優化利用第二部分的優化算法和約束條件,完成目標函數最高驅動效率(式(12))和最低功率損耗(式(13))的優化。電池SOC顯示在電動勢電壓,電池內阻確定的情況下,完成對實際電流的采集,進而得到電池充放電系數,最終得到電池SOC,完成對輪轂電機能耗利用與能耗損失的評價。
4 輪轂電機轉矩分配能耗分析
41 FTP-75和CLTC-P工況下轉矩優化
轉矩分配的目的是隨著輪轂電機轉矩轉速的變化,各輪轂電機能夠得到效率最佳的轉矩動力輸出。根據CLTC-P和FTP-75工況數據,得到速度隨時間的變化規律,如圖7、8所示,選取歐洲城市循環工況與中國乘用車工況數據,目的是在足夠長的時間內完成輪轂電機多個工況循環,更有利于驗證優化結果的有效性。在兩工況數據輸入情況下,根據輪轂電機結構與實際車輛基本信息要求下,得到工況數據下輪轂電機的總需求轉矩,如圖9、10所示。在總轉矩需求已知情況下通過LABVIEW輪轂電機實時狀態,得到輪轂電機的轉矩大小,并完成轉矩的分配優化。
由圖7可見,在250min和1650min左右FTP-75工況下轉速達到最大值,為56r/min,在300min和1550min左右轉速峰值趨于穩定。由圖8可見,在1700min左右CLTC-P工況下速度達到峰值,約為116r/min,在300min和1500min左右轉速峰值趨于穩定。由圖9和圖10可見,轉矩在整個時間段趨于穩定,故轉矩分配優化結果可取。
針對轉矩分配結果以及電池電量顯示,對比粒子群算法和改進的量子遺傳算法優化的轉矩分配優化效果,QSPO-LSTM算法比粒子群算法的優化結果更好。優化效果圖如11、12所示。
由圖11、12可知,FTP-75循環工況,多次起步加速且行駛速度較低時,輪轂電機轉矩左右分配優化效果最佳的是加入異變序列的QSPO-LSTM算法;在CLTP-P工況中高速行駛時,縱向驅動力矩需求較小時,加入異變序列的QSPO-LSTM算法最優,而縱向驅動力矩需求較大時,輪轂電機轉矩優化最佳的是改進的量子遺傳算法。
42 100km/h加速單電機失效轉矩優化
通過控制電機失效系數γ確定輪轂電機工作狀態,得到此時的輪轂電機橫擺角速度圖、輪轂電機實際輸出轉矩圖,分別如圖13(a)、(b)所示。
6s時右驅動輪轂電機失效,采用約束方程直接求解法得到各驅動電機響應狀態如圖13(c)所示。由圖可見,左輪轂電機增加提供動力,右輪轂電機轉
矩驟減為零。因左右輪轂電機轉矩的瞬時變化,首先,輪轂電機產生相應的側向力,如圖13(c)圖所示,在魯棒預測控制策略干預下,輪轂電機側向力不會無限增大,避免發生側翻;其次,輪轂電機總側向力也會發生變化,產生相應的橫擺力矩,最終在考慮魯棒性的控制下,得到輪轂電機轉矩的穩定輸出,產生的附加橫擺力矩抵消轉矩重構對前軸的影響。
43 能耗優化結果分析
根據實驗結果,輪轂電機在FTP-75和CLTC-P工況正常運轉下,得到加入改進的量子遺傳算法,粒子群算法和加入異變序列的QSPO-LSTM算法的百公里能耗,百公里電耗,電池剩余量的優化結果,仿真對比結果如表2所示,實驗對比結果如表3所示。
根據不同轉矩分配方法下能耗結果,采用加入異變序列的QSPO-LSTM算法優化的分配方法,在FTP-75和CLTC-P工況下均減少了能量消耗。其中在FTP-75工況下比改進的量子遺傳算法和粒子群算法優化分配,單循環能耗分別降低了298%和464%,100km能耗分別降低了282%和778%,電池SOC消耗分別降低了433%和578%。在CLTC-P工況下,單循環能耗分別降低了306%和481%,100km能耗分別降低了249%和893%,電池SOC消耗分別降低了492%和528%。實現了電動輪汽車的能耗優化,且能耗降低優化效果優于改進的量子遺傳算法。
通過不同轉矩分配策略下的能耗仿真結果與實驗結果對比得到誤差表如表4所示,FTP75的總能耗誤差最大,為821%,CLTC-P的電池SOC誤差最小,為314%,考慮到輪轂電機運轉過程中產生的熱量較大和電池的耐久度等因素,因此仿真結果與實驗結果的誤差在允許范圍內。
5 結 論
本文通過實驗分析輪轂電機100km/h加速單電機失效下的運動規律,驗證FTP-75工況數據和CLTC-P工況數據下兩輪轂電機轉矩分配優化效果。
以最高驅動效率為目標函數,基于加入異變序列的QSPO-LSTM算法進行輪轂電機轉矩分配的優化。對比粒子群優化算法和改進的量子遺傳算法結果,在CLTC-P工況和FTP-75工況下運轉時,可有效提高電機效率,在FTP-75工況下,單循環能耗分別降低了298%和464%;在CLTC-P工況下,單循環能耗分別降低了306%和481%。FTP75工況下的總能耗誤差最大,為821%,CLTC-P工況下的的電池SOC誤差最小,為314%,主要是因為輪轂電機運轉過程中產生的熱量和電池耐久度等因素的影響。
參 考 文 獻:
[1] 徐向陽,李光遠,陶斯友,等. 四輪獨立驅動電動汽車輪胎縱橫向滑移能耗仿真分析[J]. 機械工程學報, 2021, 57(4): 92.
XU X Y, LI G Y, TAO S Y, et al. Simulation and Analysis on Longitudinal and Lateral Slipping Energy Consumption of Four-wheel Independently Driven Electric Vehicle Tires[J]. Journal of Mechanical Engineering, 2021, 57(4): 92.
[2] 張利鵬,段嘉瑤,蘇泰,等. 電動輪驅動汽車空間穩定性底盤協同控制[J]. 機械工程學報, 2022, 58(10): 209.
ZHANG L P, DUAN J Y, SU T, et al. Chassis Cooperative Control of In-wheel Motors Drive Electric Vehicle for Improving Spatial Stability[J]. Journal of Mechanical Engineering, 2022, 58(10): 209.
[3] SONG D F, YANG D P, ZENG X H, et al. A Coordinated Control of Hydraulic Hub-motor Auxiliary System for Heavy Truck[J]. Measurement, 2021, 175: 109087.
[4] FAN J, MAO M. Astudy of Driving Force Distribution Strategy for Three-axles Electric Driving Vehicle Based on Economies[J]. Vehicle and Power Technology, 2007, 159(1): 59.
[5] 谷成,劉浩,陳辛波,等. 基于效率優化的四輪獨立驅動電動車轉矩分配[J]. 同濟大學學報(自然科學版), 2015, 43(10): 1550.
GU C, LIU H, CHEN X B, et al. Torque Distribution Based on Efficiency Optimization of Four-wheel Independent Drive Electric Vehicle[J]. Journal of Tongji University (Nature Science), 2015, 43(10): 1550.
[6] ETO R, SAKATA K, YAMAKAWA J. Driving Force Distribution Based on Type Energy for Independent Wheel-drive Vehicle on Rough Ground[J]. Journal of Terrmechanics, 2018, 76: 29.
[7] DIZQAH A M, LENZO B, SOMIOTTI A, et al. Afast and Parametric Torque Distribution Strategy for Four-wheel-drive Energy-efficient Electric Vehicles[J]. IEEE Transactions on Industrial Electronics, 2016, 63(7): 4367.
[8] STEFAN Koehler, ALEXANDER Viehl, OLIVER Bringmann, et al. Energy-Efficiencyoptimization of Torque Vectoring Control for Battery Electric Vehicles[J]. IEEE Intell. Transport. Syst. Mag, 2017, 9(3): 59.
[9] ZHANG Z, MA X J, LIU C G, et al. Dual-steering Mode Based on Direct Yaw Moment Control for Multi-wheel Hub Motor Driven Vehicles Theoretical Design and Experimental Assessment[J]. Defence Technology, 2020, 18(1): 49.
[10]陳辛波,劉浩,鐘再敏,等. 分布式驅動電動汽車的開發和行駛能耗優化分析[J]. 汽車技術, 2014 (7): 39.
CHEN X B, LIU H, ZHONG Z M, et al. Development and Driving Energy Consumption Optimization of a Distributed Drive Electric Vehicle[J]. Automotive Technology, 2014 (7): 39.
[11]羅立全,劉平,楊明亮,等. 一種提高輪邊驅動客車經濟性的驅動控制方法[J]. 汽車工程學報, 2020, 10(2): 107.
LUO L Q, LIU P, YANG M L, et al. Driving Control Method for Improving Economic Performance of Four Wheel-drive Electric Buses[J]. Chinese Journal of Automotive Engineering, 2020, 10(2): 107.
[12]姜濤,耿聰,薛奇成,等. 基于能耗優化的前后軸獨立驅動電動汽車轉矩分配策略[J]. 北京交通大學學報, 2019, 43(5): 102.
JIANG T, GEN C, XUE Q C, et al. Torque Distribution Strategy of FRID EV Based on Energy Consumption Optimization[J]. Journal of Beijing Jiaotong University, 2019, 43(5): 102.
[13]WANG R. CHEN Y. FENG D W. Development and Performance Characterization of an Electric Ground Vehicle with Independently Actuated In-Wheel Motors [J]. Journal of Power Sources, 2011,196: 3962.
[14]蔣曉屾,任佳,顧敏明,等. 多維度慣性權重衰減混沌化粒子群算法及應用[J]. 儀器儀表學報, 2015, 36(6): 1333.
JIANG X S, REN J, GU M M, et al. Multi-dimensional Descending Chaotic Inertia Weight Based PSO and Its Application[J]. Chinese Journal of Scientific Instrument, 2015, 36(6): 1333.
[15]肖白,肖志峰,姜卓,等. 基于降噪自編碼器、奇異譜分析和長短期記憶神經網絡的空間電力負荷態勢感知[J]. 中國電機工程學報, 2021, 41(14): 4858.
XIAO B, XIAO Z F, JIANG Z, et al. Spatial Load Situation Awareness Based on Denoising Autoencoder, Singular Spectrum Analysis and Long Short-term Memory Neural Networks[J]. Proceedings of the CSEE, 2021, 41(14): 4858.
[16]陳路明,廖自力,張征. 多輪分布式電驅動車輛雙重轉向分層控制系統設計[J]. 汽車工程, 2021, 43(9): 1383.
CHEN L M, LIAO Z L, ZHANG Z. Design of Hierarchical Control System for Dual-steering of Multi-wheel Distributed Electric Drive Vehicles[J]. Automotive Engineering, 2021, 43(9): 1383.
(編輯:溫澤宇)
基金項目: 國際合作重點研發項目(2019YFE0121300)
作者簡介:車翠茹(1997—)女,碩士研究生;
管詣博(1994—)男,碩士研究生
通信作者:吳 石(1971—),男,博士,教授,E-mail:wushi971819@163com
