基于機載激光雷達的公路橫斷面測量方法研究
2024-07-15 00:00:00陳振
科技資訊 2024年9期

摘要:機載激光雷達技術不僅可以測量地區地形圖還可測量線路走廊帶,也可以提供高精度的數字地面模型為后期設計做準備,同時結合地物影像數據,增強了對地物的判別能力,在高速公路勘測設計等行業領域中有著廣闊的應用前景和優勢。基于此,采用機載雷達技術獲取測區范圍內原始點云數據,應用Terrasolid軟件的一系列模塊對點云數據進行處理。包括在TerraScan模塊對激光點云進行濾波、分類,在TerraModeler模塊中對濾波后的激光點云進行重組,內插生成DEM,最后獲得的橫斷面高程精度為±0.12m(檢查限差為±0.31m),滿足高速公路勘測規范要求。
關鍵詞:機載激光雷達點云數據公路勘測橫斷面圖
ResearchontheMeasurementMethodofHighwayCross-SectionsBasedonAirborneLiDAR
CHENZhen
WuhanComprehensiveTransportationResearchInstituteCo.,Ltd.,Wuhan,HubeiProvince,430015China
Abstract:AirborneLiDARtechnologycannotonlymeasurebothregionaltopographicmapsandroutecorridorregions,butalsoprovidehigh-precisiondigitalgroundmodelstoprepareforlaterdesign,andcombinedwithgroundobjectimagedata,itenhancestheabilitytodistinguish groundobjects,whichhasbroadapplicationprospectsandadvantagesinindustriessuchashighwaysurveyanddesign.Basedonthis,thisarticleusesairborneradartechnologytoobtainrawpointclouddatawithinthemeasurementarea,appliesaseriesofmodulesofTerrasolidsoftwaretoprocessthepointclouddata,whichincludesfilteringandclassifyingthelaserpointcloudintheTerraScanmodule,recombiningthefilteredlaserpointcloudintheTerraModelermoduleandinterpolatingtogeneratetheDEM,andfinallytheelevationaccuracyoftheobtainedcross-sectionis±0.12m(theinspectionlimitof±0.31m),whichmeetstherequirementsofhighwaysurveyspecifications.
KeyWords:AirborneLiDAR;Pointclouddata;Highwaysurvey;Cross-sectiondrawing
近年來,我國經濟社會發生了翻天覆地的變化,公路建設的成就令世人矚目。一方面,經濟社會的向前發展為公路建設注入了必要的資金;另一方面,公路建設的推進極大地促進了經濟社會的向前發展[1]。隨著經濟社會的不斷進步,公路建設的速度進一步加快。傳統測量模式由于其數據獲取模式單一、自動化程度不高、勞動強度大、工作效率低下等弊端,已不能滿足新時代公路建設對公路測繪的新要求。如何實現公路建設需要的空間數據的自動、高效、準確獲取,并對其進行快速處理,形成公路建設需要的可靠成果,是測繪地理信息工作者一直研究和追求的目標之一。
公路設計測繪先行,公路測繪分為初測、定測2個階段,以滿足不同設計階段的數據需求。公路初測階段主要是對路線方案進行比較,確定路線基本走向,一般要求1∶2000比例尺地形圖,重要工點要求測制1∶500比例尺地形圖。為了滿足定測階段施工圖設計需要,主要進行路線中樁測量及橫斷面測量[2]。
公路橫斷面測量是測定與公路中線正交方向上地形的起伏情況,用于擋墻、路基(包括排水、用地)、土石方工程量的計算和防護工程設計。傳統測繪方式是采用水準儀、全站儀、RTK等儀器設備獲取斷面線地形變換點平面位置和高程[3]。本文以某高速公路機載激光雷達航測為例,探討點云數據獲取與處理、應用效果評價等環節,剖析測繪新技術在公路橫斷面測量中的應用效果。
1任務要求
某高速公路主線67km,地勢高差起伏較大,沿線沖溝、坎居多,居民地分布少。任務要求獲取擬建高速公路設計中心線左右兩側各250m帶寬范圍內機載雷達點云數據。參照《機載激光雷達數據獲取技術規范》(CH/T8024—2011)相關要求及設計單位特殊要求,其中,點云密度大于16點/m2。高程精度:經分類的點云數據高程中誤差不大于0.1m,困難地區(大面積植被覆蓋、亂掘地、采沙場、地面坡度在6°以上等)的中誤差可相應放寬0.5倍。
2技術路線
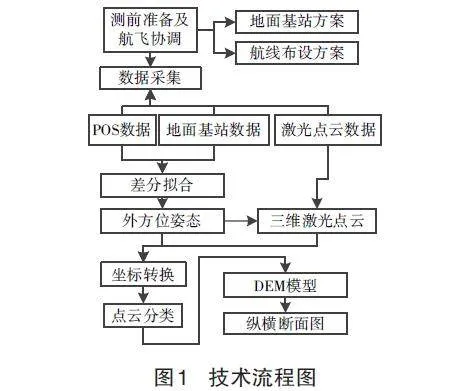
首先,采用機載雷達技術獲取測區范圍內原始點云數據;其次,通過內業數據預處理、點云數據濾波等關鍵環節,獲得地面點云;最后,在精度合格情況下,通過橫斷面處理軟件進行道路任意斷面提取、繪制斷面圖[4]。技術流程如圖1所示。
其中,航線規劃需要綜合考慮預期高程精度、點云密度、無人機起降場地、立交橋及支線不規則飛行范圍、敏感點及高大建筑物避讓、山區仿地飛行耗電量高等特點,在保證安全的基礎上,參考經驗數值,山區3~4km/架次、平原5~7km/架次,共規劃22架次。
3LiDAR數據處理
機載雷達點云數據來源于各種不同的集成儀器,主要包括載體位置、方向、距離值、時間、回波強度、光學影像等數據信息,處理這些數據時要同步提取和內插,然后計算出最終想要的測量數據。機載雷達數據處理主要包括數據預處理、數據后處理即點云濾波分類、航帶拼接、坐標轉換、數字產品(包括數字地面模型、數字高程模型、數字正射影像圖及數字線劃圖等)的制作。本項目的激光雷達數據主要利用Terrasolid軟件進行數據處理,在TerraScan模塊中進行點云濾波分類,在TerraModeler模塊中制作數字地面模型和數字高程模型,在TerraPhoto模塊制作數字正射影像圖。
3.1數據預處理
數據預處理的內容包括導航文件制作、控制文件制作、三維點云數據的生成,如圖2所示。
3.2點云數據后處理
3.2.1點云濾波、分類
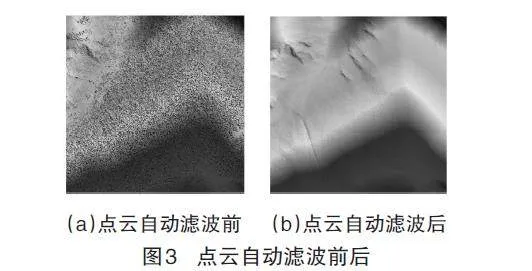
這一步也即基于三角網濾波算法,在開始時選取一些最低點構建原始地面模型,這些模型中只有最高點分布在地表上,其他大部分都低于地面,然后反復加入新點反復建立地表三角網,最終把地表點分離出,使模型比較接近真實地表[5]。點云自動濾波前后對比結果如圖3所示。
在工程應用中,參數的設定很難保證達到所需要的理想濾波效果,目前也沒有能夠完全將各類點精確分類的濾波方法。因此,需要人工干涉以保證濾波結果符合相關要求,滿足生產需要。
3.2.2坐標轉換
機載激光雷達系統采用的是WGS-84坐標系,大地高為其高程基準,本項目采用1980西安坐標系,高程系統為1985國家高程基準,兩種坐標系和高程基準不能直接應用測量結果,必須進行坐標轉換。
在測區內沿路線測量部分高程和平面參考數據,每隔約10km做一個參考面。WGS-84坐標利用七參數法轉換成1980西安坐標。在測區進行水準聯測結算出高程擬合參數,利用擬合法進行高程擬合轉換。
3.3數字高程模型(DigitalElevationModel,DEM)制作
3.3.1缺失數據區域的補測
由于水體的反射性,水域基本沒有點云數據,魚塘、河流等出現較大的無數據區域。另外,植被茂密,地形特殊處也有數據缺失現象,內插后影響數字高程模型精度,對這些不滿足要求的區域利用GPSRTK和全站儀進行補測、實測、特征點采集,以彌補點云缺失的數據,并提供對LIDAR數據進行必要校正的數據[6]。基于本項目的特點,實測為主,激光點細化之;空曠裸露區域以激光點為主,實測點校正之。
本項目補測采用的儀器有:GPS是標稱精度均為實時動態時的平面精度為±10mm+1pm的天寶5700和天寶5800;全站儀是測角標稱精度為2″的Leica905L,測角標稱精度為2″的TOPCON602和測角標稱精度為5″的TOPCON335。
采點的主要內容及要求:(1)實測測區內數模特征線,包括道路、水域、斷裂線(地形突變如沖溝、陡坎、坡等)等;(2)對測區已有道路施測時應確保能反映路基斷面形狀,二級及以下公路應測5個點(兩側坡底,兩路肩外側,路中點);(3)水域(河、湖、溝、渠、塘等)測量時,其岸體視同坡坎進行采集;單線表示的溝渠(寬度小于2m)實測溝底高程并量注寬度,內業及時將測量數據整理成圖形;(4)高大植被茂密區域,激光點可能無法穿透到地面,外業人員對這樣的區域進行補點工作,由于這種區域RTK往往無信號,利用全站儀進行施測。
3.3.2DEM制作
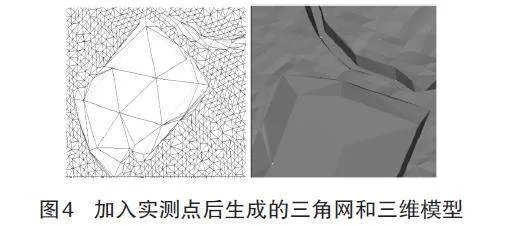
在TerraModeler模塊中制作數字高程模型。將實測點與經過濾波的激光點展繪在圖上,用“激光點檢查”工具對激光點進行統計和分析工作,從而達到激光點、實測點互檢。在植被茂密地區,激光點可能會不準確,就將此地區實測的點展到點云圖上,并刪去實測點范圍內的激光點云,則所繪制的三角網加上實測的高程點及激光點云形成最終的可構建模型的不規則三角網。有些水域沒有激光點,如魚塘中沒有激光點,其他的水溝水面也沒有激光點,這就需要將所測的斷裂線繪制成三角網,再加上點云,構建TIN和三維模型如圖4所示。
3.4橫斷面圖制作
斷面圖是根據測量資料繪制的可以直觀、準確地體現地面起伏狀況的資料,是高速公路工程中路基設計,土方量計算以及放樣、路基形狀檢查的數據支持。橫斷面測量是利用數字高程模型基于AutoCAD的二次開發軟件模塊生成。根據給出的中樁高程值,在數字高程模型上求出其高程值,作為第一個點。然后,再在垂直中線的方向上以一定的步長(一般取0.5m)搜尋特征點,并利用雙線性內插的方法求出其高程值,同時計算出這兩個點之間的距離(s)、高差(h)和兩點間的斜率(k),再根據步長和k求出第三個點的高程,如果與其在數字高程模型上的高程之差絕對值小于之前設置的閾值,則不保存,繼續搜尋計算下一個特征點;反之,則保存第二個點的坐標,并將其作為第一個點,剛才計算的點作為第二個點重復上述操作,以此類推求出橫斷面的所有特征點,從而根據斷面要求在數字高程模型上提取出橫斷面線。
利用全站儀、GPSRTK對機載LiDAR數據產品精度進行檢查,DEM高程精度±0.12m(限差為±0.2m),橫斷面高程精度與DEM高程精度相同,為±0.12m(檢查限差為±0.31m),這些精度均滿足高速公路勘測規范要求。
4結語
斷面法是基于傳統測繪點對點模式的一種成果展現形式,也是目前交通、水利行業設計、施工階段重要的測繪成果之一。相較于方格網法,傳統斷面方式并不能發揮海量點云數據優勢,還有待技術規范、行業標準的更新和支持,同時還需對新技術應用不足和關鍵技術問題進行更深入研究。本文對交通、水利等類似業務的開展具有重要參考價值,可以借鑒使用。
參考文獻
[1]楊犇.無人機LiDAR和單波束測深在道路勘測中構建DEM的應用研究[D].連云港:江蘇海洋大學,2023.
[2]賈東杰.無人機LiDAR在道路勘測設計中的應用[J].城市勘測,2022(6):142-145.
[3]李通.車載LiDAR技術在高速公路改擴建勘測中的應用[J].北京測繪,2022,36(5):611-614.
[4]劉佳.基于機載LiDAR點云的山區道路提取研究[D].重慶:重慶交通大學,2023.
[5]陳國柱.無人機LiDAR數據在公路勘測中的應用[J].工程技術研究,2020,5(2):44-45.
[6]李通.車載LiDAR技術在高速公路改擴建勘測中的應用[J]北京測繪,2022,36(5):611-614.
