基于改進混合灰狼優化算法的無人機三維路徑規劃
2024-07-17 00:00:00王海群鄧金銘張怡曹清萌
無線電工程 2024年4期
關鍵詞:無人機










摘 要:針對傳統灰狼優化(Grey Wolf Optimization,GWO) 算法求解無人機三維路徑規劃問題時會出現收斂速度慢、容易陷入局部最優等問題,提出一種改進混合灰狼優化算法———CLGWO。基于Cat 混沌映射和反向學習策略初始化灰狼種群,為算法全局搜索過程中豐富種群多樣性奠定基礎;提出新型非線性收斂因子的改進策略,提高算法全局搜索能力。在灰狼位置更新中提出引入獅群優化(Lion Swarm Optimization,LSO) 算法的擾動因子和動態權重,使灰狼具有主動的搜索能力,避免因灰狼失去種群多樣性而陷入局部最優。為驗證改進算法的有效性,進行了8 個國際通用的標準測試函數收斂性對比實驗和無人機三維路徑規劃仿真實驗。實驗結果表明,CLGWO 算法在單峰、多峰函數上均有較好的收斂性、較高的尋優精度;三維路徑仿真環境下,CLGWO 算法的平均路徑長度、平均迭代次數、平均運行時間相比于GWO 算法分別優化了33% 、31% 、52% ,且路徑轉折少,能較好地得到全局最優值,驗證了CLGWO 算法的有效性。
關鍵詞:無人機;三維路徑規劃;混合灰狼優化算法;Cat 混沌映射;獅群優化算法
中圖分類號:TP301. 6 文獻標志碼:A 開放科學(資源服務)標識碼(OSID):
文章編號:1003-3106(2024)04-0918-10
0 引言
隨著信息技術的不斷發展,無人機正向智能、高效、高精度的方向發展,已在搜索、救援、測繪、監控等重要領域得到廣泛應用[1-2]。無人機在執行任務時容易受到山體和建筑物等復雜地形的影響,為了避免無人機與障礙物發生碰撞,規避障礙物并且順利完成任務已成為無人機自主導航的重要內容之一[3]。路徑規劃是在無人機自身性能和復雜環境的約束條件下,從起始位置到目標位置找到一條安全、快速、低成本的飛行路徑[4-5]。路徑規劃可分為經典算法和群體智能優化算法[6]。經典路徑規劃算法包括A 算法、Dijkstra 算法、人工勢場(ArtificialPotential Field,APF)算法等,這些算法有著效率高、速度快的優點,但存在計算復雜度高、目標不可達等缺點[7]。受到自然界現象的啟發,國內外學者提出了許多生物智能優化算法如粒子群優化(ParticleSwarm Optimization,PSO)算法、果蠅優化算法(FruitFly Optimization Algorithm,FOA)、獅群優化(LoinSwarm Optimization,LSO)算法等。這些智能算法可以依據不同的搜索策略迅速找到有效路徑,并通過不斷地迭代獲得最優路徑。但是,如何避免算法陷入局部最優問題,是許多智能算法需要解決的一個難題[8]。
灰狼優化(Grey Wolf Optimization,GWO)算法是一種新型群體智能優化算法,是由Mirjalili 等[9]在2014 年從自然界灰狼群體狩獵行為得到啟發而提出的。傳統GWO 算法結構簡單、參數量少,近年來在無人機路徑規劃和避障等領域得到了廣泛應用。在無人機三維路徑規劃中,由于飛行空間的復雜性,GWO 算法會出現種群多樣性較差、收斂速度慢和易陷入局部最優等問題。為解決這些問題,Dewangan 等[10] 提出一種新型灰狼優化算法———AGWO,引入無人機姿態控制和新的適應度函數,能夠有效地解決三維路徑規劃問題,并且收斂速度快、全局搜索能力強,但算法易陷入局部最優而影響路徑規劃的實時性。Li 等[11]利用Tent 混沌映射的隨機性、遍歷性和正則性提出改進灰狼優化算法———TGWO,提出了新的初始種群優化策略,然而采用混沌映射強化初始種群的質量,缺少針對性,并且使用的測試函數都是單峰函數,不能充分體現TGWO 的全局尋優能力。滕志軍等[12]通過Tent 混沌映射、非線性控制參數和粒子群算法的思想對灰狼算法進行了改進。石春花等[13]將灰狼算法與正弦余弦算法進行優化結合,并將該算法應用于醫藥物流配送路徑規劃。王永琦等[14]混合灰狼優化(HGWO)算法,采用反向學習策略生成初始種群,確保了初始解的多樣性,并結合歷史信息和精英反向學習證實了算法的準確性。
為了降低GWO 算法后期收斂速度慢、容易陷入局部最優等問題,本文提出一種改進的混合灰狼優化算法———CLGWO。在初始化灰狼種群方面,采用Cat 混沌映射和反向學習策略,增加灰狼種群分布的多樣性;改進線性收斂因子,引入非線性來擴大種群的全局搜索范圍;提出融合LSO 算法和動態權重,避免算法陷入局部最優。通過8 種國際標準測試函數對比實驗和無人機三維路徑規劃仿真實驗,驗證了CLGWO 算法尋優速度更快、精度更高,在路徑尋優時可以更加精確地鎖定全局最優解。
1 混合GWO 算法———CLGWO
1. 1 GWO 算法
GWO 算法借鑒了灰狼種群的社會等級制度與捕食行為模式進行優化搜索。在GWO 算法中,狼被分為4 個等級:α 狼、β 狼、δ 狼和ω 狼。狼群等級階層如圖1 所示。其中α 為狼王,主要負責群體的各項決策事物;β 狼協助α 狼并做出決策;δ 狼遵守α 狼和β 狼的指令,可以管理ω 狼。灰狼依靠這種等級制度來覓食和捕食。當圍成的圓圈包圍獵物后會逐漸靠近獵物,最終攻擊獵物。
灰狼群體在α 狼的帶領下,β 狼和δ 狼逐漸接近獵物并包圍獵物,這一過程的數學模型為:
式中:Dα、Dβ、Dδ 為灰狼個體到α 狼、β 狼、δ 狼的距離,Xα 為α 狼的位置,Xβ 為β 狼的位置,Xδ 為δ 狼的位置,X(t)為灰狼的位置,A、C 為協同系數。
式中:r1 、r2 為[0,1]的隨機量,a 在迭代過程中從2線性減小到0。因此設定a 的取值為[-2,2],C 的取值為[0,2]。
當獵物停止移動時,灰狼群就會攻擊獵物。這個過程可以通過A 從2 減少到0 來模擬。當A >1時灰狼個體離開目標進行全局搜索;當A ≤1 時,灰狼開始攻擊獵物。
雖然GWO 算法有較強的收斂性和參數少等優勢,但GWO 算法應用于三維路徑規劃時,會產生以下問題:
① 種群多樣性較差。隨機初始化生成的種群不能保證良好的種群多樣性。
② 后期迭代緩慢。GWO 算法主要依靠α 狼、β狼和δ 狼來判斷與獵物的距離。因此,后期收斂速度較慢。
③ 容易陷入局部最優。由于適應度最好的α狼不一定是全局最優解,很可能是局部最優解。當α 狼與β 狼、δ 狼距離無限接近時,就有可能陷入局部最優。
針對上述問題,本文提出CLGWO 算法。
1. 2 CLGWO 算法
(1)基于Cat 映射和反向學習策略的種群初始化
為解決初始灰狼種群多樣性較差問題,受文獻[15]啟發,引入Cat 混沌映射和反向學習策略的初始化方法。
Cat 映射是一個二維的可逆混沌映射,在[0,1]產生的混沌序列分布均勻。反向學習策略利用精英個體比一般個體具備更有用信息的優勢,通過當前種群中的精英個體構造出反向種群加入當前種群,增加種群的多樣性,并從擴展后的新種群中選取最優的特定個體構成新一代個體,進入迭代更新。
Cat 映射是一個二維的可逆混沌映射,其動力學方程為[15]:
基于Cat 映射和反向學習策略的種群初始化步驟為:
① 基于Cat 混沌映射生成N 個初始解Xi。
② 利用反向學習策略對初始解產生相對應的逆序解:
OPi = K(Xdmin + Xdmax )- Xi, (8)
式中:OPi 為Xi 的逆序解,K 為[0,1]的隨機數,Xdmin、Xdmax 分別為所有初始解中第d 維向量的最小值和最大值。
③ 將初始解與逆序解結合,并根據適應度值的遞增順序對其進行排序,選擇適應度值位于前N 個最好的解作為初始群體Ni[15]。
(2)構建新型非線性收斂因子a
在GWO 算法中,收斂因子a 從2 ~ 0 線性減小,算法搜索能力效率低,因此提出一種新型非線性收斂因子:
式中:t 為當前迭代次數,T 為種群最大迭代次數。
(3)融合LSO 算法
在GWO 算法中,由于α 狼的領導作用,狼群中的所有灰狼個體都趨向于最優的α 狼,因此具有較強的全局搜索能力,但容易失去種群多樣性而陷入局部最優。
雄獅的比例因子影響最終的優化效果,雄獅比例越大,幼獅的數量就越少,收斂速度越快。雄獅的比例因子β 是[0,1]的隨機數,為了算法收斂更快,β 一般小于0. 5[16]。
母獅的擾動因子αf 使得母獅的活動范圍由大到小,提高了算法收斂速度,從而得到最優解。擾動因子的表達式為:
αf = step × exp(- 30t / T) 10 , (10)
式中:step = 0. 1 (high′-low′)為獅子移動的最大步長,high′和low′分別為各維度的最小平均值和最大平均值,t 和T 分別為當前迭代次數和最大迭代次數。
幼獅的擾動因子αc 可以延長或縮小搜索范圍。找到食物后,逐漸縮小搜索范圍,擾動因子呈線性下降趨勢,增強了算法全局最優能力。擾動因子αc 的定義為:
αc = step × ((T - t)/ T)。(11)
融入LSO 算法的擾動因子,使α 狼、β 狼和δ 狼的位置更新不趨向于α 狼,而是具有一定的隨機性,加強了種群的多樣性,使算法在保證不陷入局部最優的同時,具有較大的搜索空間。融入LSO 算法后α 狼、β 狼和δ 狼的更新為[16]:
X1 = αf(Xα - A1 × Dα ), (12)
X2 = β(Xβ - A2 × Dβ ), (13)
X3 = αc(Xδ - A3 × Dδ ), (14)
式中:設定αf 和αc 的step 為1。
(4)引入動態權重因子b
文獻[17]提出改進的粒子群算法中采用慣性權重系數ω 來優化局部與全局搜索能力:
式中:ωmax 和ωmin 分別為最大慣性權重和最小慣性權重。
本文引入動態權重因子b,動態改進GWO 的個體步長:
式中:bf 和bs 分別為權重因子的初值和終值。引入動態權重后的位置更新式為:
X(t + 1) = b(t)(X1 + X2 + X3 )。(17)
1. 3 CLGWO 算法流程
CLGWO 算法流程如圖2 所示。
算法流程為:
① 輸入:種群規模N、初始迭代次數t = 1、最大迭代次數T、初始收斂因子a。輸入無人機約束的總代價函數 F( Xi) 、最遠航程 Lmax、飛行速度 V、轉角約束為φ、飛行距離L。
② 基于Cat 映射和反向學習策略生成初始種群Ni,其中i = 1,2,3,…,n。
③ 計算灰狼算法個體α、β、δ 的適應度值,確定灰狼個體位置Xα、Xβ、Xδ。
④ 根據式(9)更新收斂因子a。
⑤ 根據式(12)~ 式(14)引入LSO 算法更新灰狼個體位置X1 、X2 、X3 。
⑥ 根據式(16)更新動態權重因子b。
⑦ 判斷是否t≥T,如果t<T,則令t = t+1,并返回③;否則,算法迭代結束,輸出算法全局最優值結果和最優路徑。
2 無人機三維路徑規劃約束條件分析
2. 1 三維路徑規劃分析
無人機在三維路徑規劃的實際應用中,灰狼個體的位置更新坐標集表示無人機的一條飛行路徑,CLGWO 算法通過位置更新策略,可以從眾多飛行路徑中搜尋到一條符合約束條件的最優路徑。本文主要研究單個無人機在山地環境下的性能約束,由代價函數來決定。
2. 1. 1 最優路徑
為了無人機能夠高效執行作業任務,在不同的應用場合需要選擇一條最優路徑。假設對于每條路徑在搜索映射對應的路徑節點為Pij = (xij,yij,zij ),下一路徑節點為Pi,j+1 = (xi,j+1 ,yi,j+1 ,zi,j+1 ),定義2 點的歐氏距離為||Pij Pi,j+1|| 。路徑長度的代價函數計算如下:
2. 1. 2 環境建模
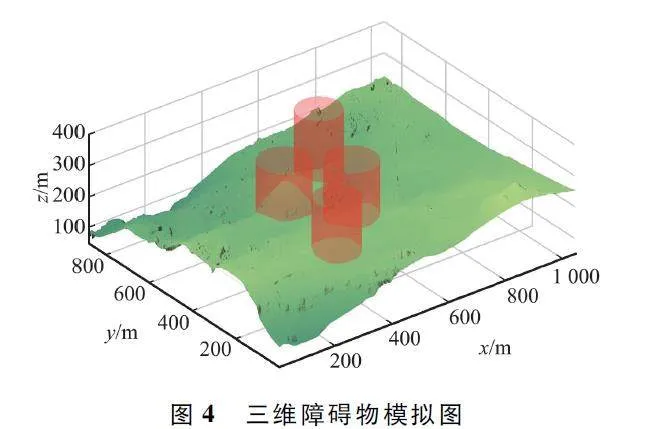
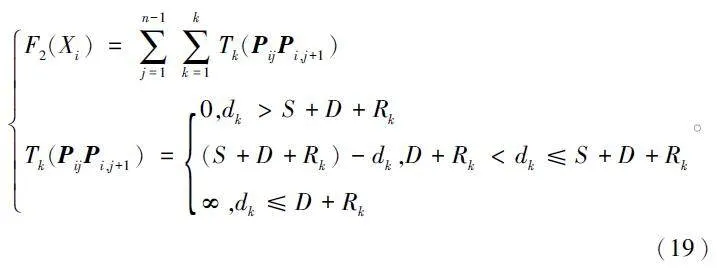
復雜的障礙物環境會對無人機路徑規劃產生不利影響,因此對復雜障礙物精準建模可以保證無人機安全的執行任務。本文引用文獻[18]山地模型對無人機的飛行環境進行建模。假設K 為所有障礙物集合,每個障礙物規定為一個圓柱體,中心投影坐標為Ck,半徑為Rk,如圖3 所示。對于給定路徑||Pij Pi,j+1||,相關的代價與其距離dk 到Ck 成正比。三維障礙物模擬圖如圖4 所示,設定無人機路徑起點為Ps(x1 ,y1 ,z1 ),目標點為Pe(xm ,ym ,zm )。障礙物威脅的代價函數為:
2. 1. 3 總代價函數
通過考慮無人機的最優路徑,環境障礙物的安全性與可行性約束條件,一條與路徑Xi 參數相關的總代價函數為:
F(Xi) = b1 F1(Xi)+ b2 F2(Xi), (20)
式中:b1 、b2 為權重系數,決策變量Xi 由路徑節點Pij = (xij,yij,zij)決定。總的代價函數F(Xi )可以作為路徑規劃過程的輸入。
2. 2 無人機約束條件
(1)航程約束
無人機具有最大巡航距離,需要考慮無人機航程的約束性。假設無人機各航段的導航距離為li,能保證安全返航的最遠航程為Lmax,總航行距離為n,航程的約束條件為:
(2)速度約束
速度約束與無人機的型號和動力裝置有關,無人機的飛行速度通常被限制在一定的范圍內。假設無人機的最大速度為Vmax,最小速度為Vmin,無人機的飛行速度為:
Vmin < V < Vmax 。(22)
(3)飛行高度約束
為了提高無人機飛過山坡的幾率,同時不會因為飛行過低撞擊地面,無人機的飛行高度應保持在一定的范圍。假設飛行高度最大值為Hmax,最小值為Hmin,無人機飛行高度的約束條件為:
Hmin < H < Hmax 。(23)
(4)角度約束
無人機在飛行過程中,如果轉彎角度超過最大轉彎角度限制,無法保證飛行安全。無人機的轉角約束為:
(5)最小飛行距離約束
假設無人機從起始點到目標點的最小飛行距離為Lmin,無人機的飛行距離L 滿足:
L ≥ Lmin 。(25)
3 仿真實驗結果與分析
3. 1 仿真環境和參數設置
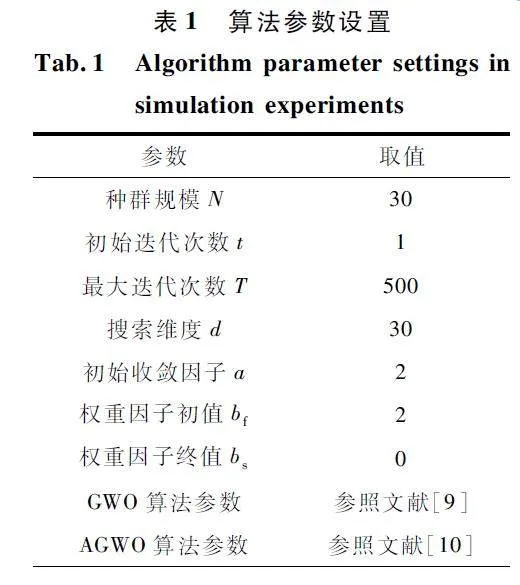
為了驗證CLGWO 算法的有效性,實驗包括測試函數實驗和無人機三維路徑規劃仿真實驗。實驗環境為Intel(R)Core(TM)i710510U CPU @ 4. 90 GHz,所有代碼通過MatlabR2021a 編程。本文與文獻[9]的GWO 算法、文獻[10]的AGWO 算法、文獻[11]的TGWO 算法、文獻[13]的HGWO 算法、文獻[16]的LSO 算法進行對比實驗。算法參數設置如表1 所示。
3. 2 標準測試函數實驗
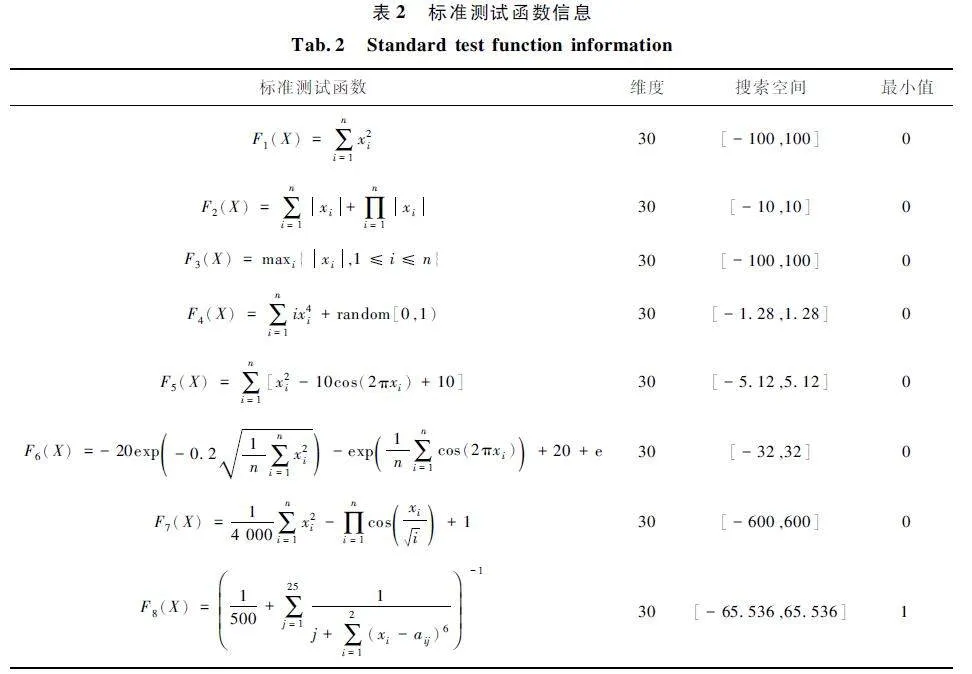
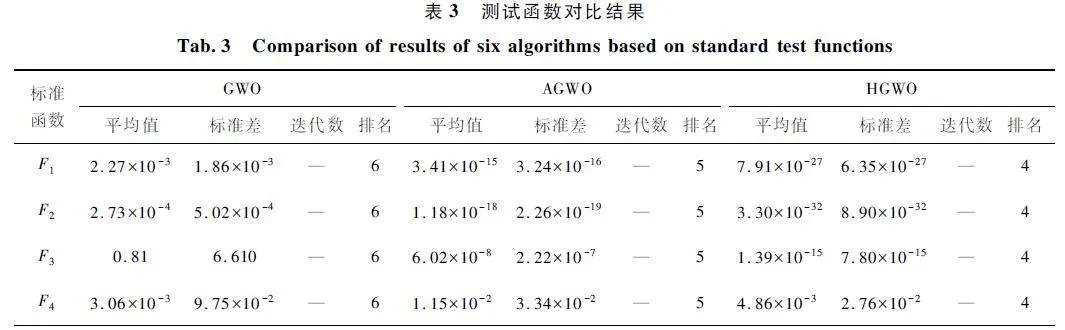
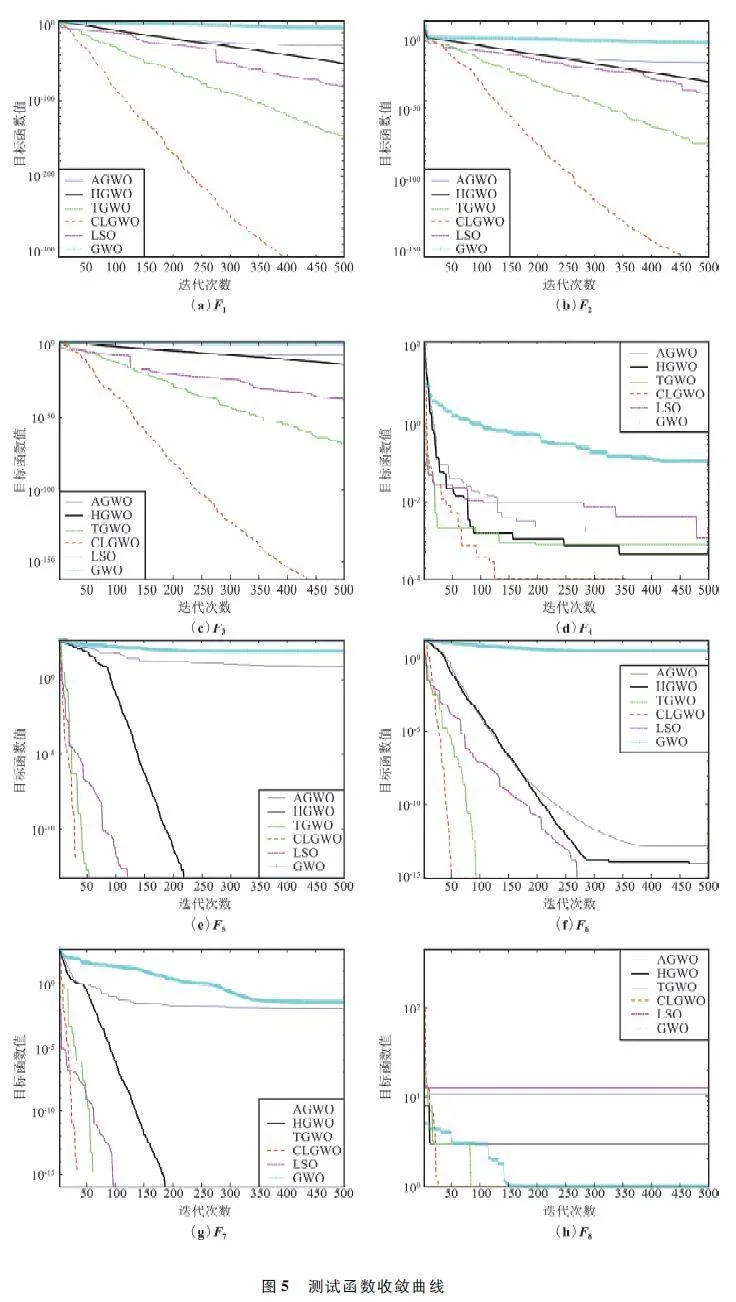
在測試函數實驗方面,標準測試函數信息如表2所示,選用了文獻[19]中國際上常用的8 種標準測試函數。其中,F1 ~ F4 為單峰函數,可用于驗證算法局部搜索能力;F5 ~ F8 為多峰函數,可用于驗證算法的收斂性、局部和全局之間的平衡能力。本文設置T = 500、N = 30,6 種算法單獨測試30 次。測試函數收斂曲線如圖5 所示,對比結果如表3 所示。
由圖5 可以看出,由于CLGWO 算法引入混沌反向學習策略的種群初始化和新型非線性收斂因子,在灰狼狩獵搜索過程中起到了良好的引導作用。在單峰函數F1 ~ F4 的對比結果中,搜索初期,CLGWO 算法的測試函數曲線呈現快速下降趨勢,證明使用Cat 混沌映射和反向學習策略來初始化灰狼種群,在算法迭代初期有效提高了算法收斂速率;在尋優階段,CLGWO 算法可以更加精確地鎖定全局最優解。對于多峰函數F5 ~ F8 ,雖然CLGWO 算法的全局最優值沒有很大的優勢,但是算法迭代數少,收斂過程具有明顯的優越性,平衡了算法的全局和局部搜索能力。在標準測試函數中不同算法的平均值、標準差、迭代數和算法排名見表3。
由表3 可以看出,相較于其他5 種算法,CLGWO 算法的平均值更優、標準差更小,排名第1。對函數F5 而言,TGWO、LSO 和CLGWO 算法的平均值相近,但CLGWO 算法的標準差最小、迭代次數少、穩定性較好;對于函數F6 ,在理論最優值不為0的情況下,相比TGWO 和LSO 算法,本文提出的CLGWO 算法同樣具有較好的尋優效果,主要是因為融入了LSO 算法的位置更新策略和引入了動態權重,CLGWO 算法有效避免了陷入局部最優。
3. 3 無人機三維路徑規劃仿真
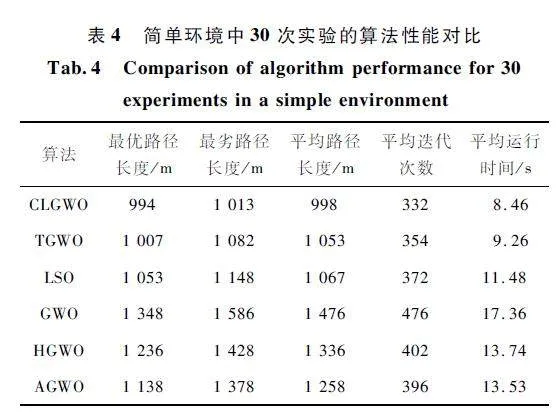
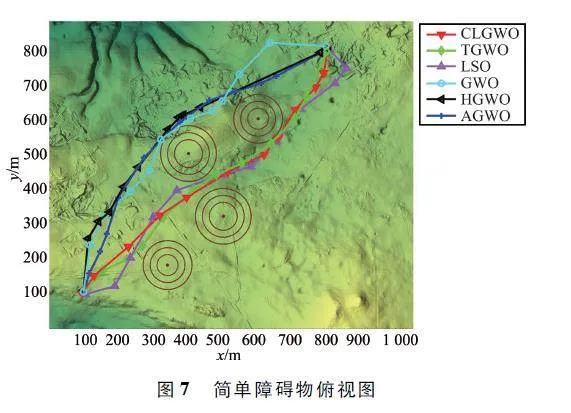
在三維路徑規劃仿真中,使用Matlab R2021a構建山地模型并進行仿真實驗。無人機的飛行空間為1 000 m×800 m×400 m,起點Ps(100 m,100 m,100 m),目標點Pe(800 m,800 m,150 m)。灰狼種群數N 為30,最大迭代次數T 為500,初始收斂因子a = 2。無人機的最遠航程Lmax 為2 000 m,角度約束φ≤60°。將GWO 算法、AGWO 算法、HGWO 算法、TGWO 算法、LSO 算法和CLGWO 算法基于上述環境進行三維路徑規劃仿真,對比仿真結果的三維視圖和俯視圖分別如圖6 和圖7 所示。簡單環境中30 次實驗的算法性能對比如表4 所示。
由圖6 可以看出,每種算法都能有效地規避障礙物,且不超出映射范圍。GWO 算法容易陷入局部最優且路徑最長;AGWO 算法由于引入無人機姿態控制和新的適應度函數路徑優于GWO 算法,但路徑較長,容易陷入局部最優;相比之下,HGWO 算法、LSO 算法和CLGWO 算法路徑平滑,能找到全局最優值;本文的CLGWO 算法可以在較短時間內得到最短路徑,且轉折較少。
由表4 可以看出,本文CLGWO 算法相對于GWO 算法、AGWO 算法、HGWO 算法的平均路徑長度縮短了33% 、21% 、26% ;平均迭代次數縮短了31% 、17% 、18% ;平均運行時間縮短了52% 、37% 、38% ;最優路徑長度與最劣路徑長度,CLGWO 算法均優于其他5 種算法。CLGWO 算法在簡單三維障礙物情況下具有最優的路徑和良好的適應性。
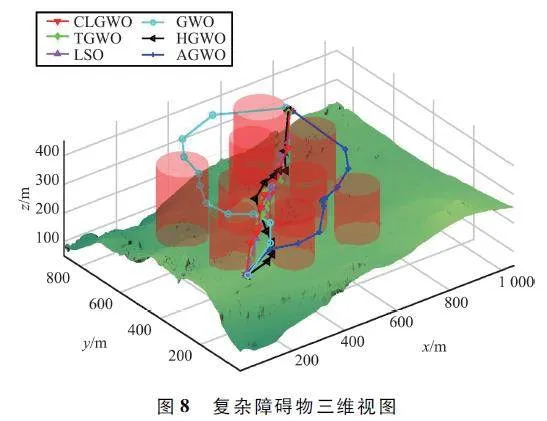
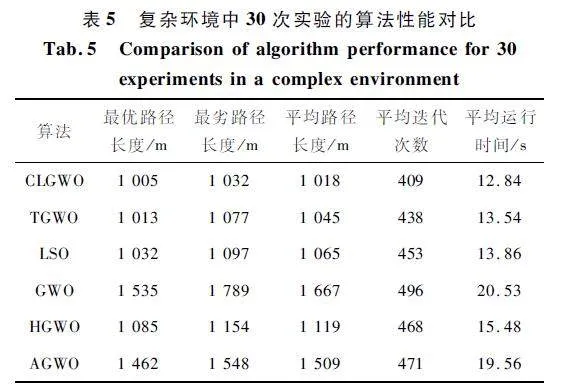
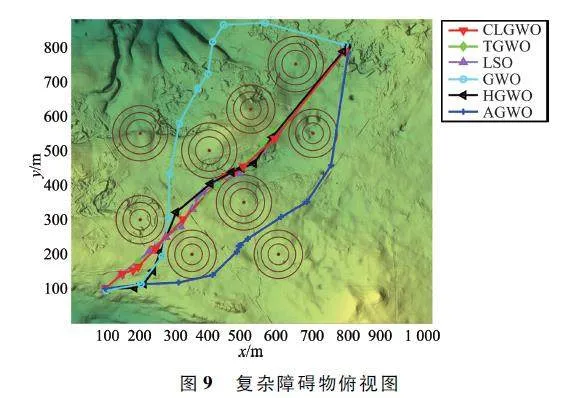
為了進一步驗證CLGWO 算法的優越性,將山地模型障礙物數量增加到9,在復雜障礙物環境下6 種算法對比實驗三維視圖如圖8 所示,俯視圖如圖9 所示,30 次對比實驗的算法性能對比如表5 所示。
在復雜障礙物環境中,CLGWO 算法能夠獲得接近最優解,LSO 算法和TGWO 算法也接近最優解,但平均迭代數高于CLGWO 算法;GWO 算法的平均路徑長度最長,是CLGWO 算法的1. 6 倍,且容易超出飛行邊界,由于探索節點較多,導致了大量的無效轉彎,算法的搜索效率低、耗時長、容易陷入局部最優;CLGWO 算法的初始路徑優于HGWO 算法,證明本文引用Cat 混沌映射和反向學習策略產生的初始種群優于HGWO 算法的反向學習策略產生的初始解;CLGWO 算法在平均迭代次數也優于其他算法,證明新型非線性收斂因子在降低迭代次數上具有明顯的優勢。
通過6 種算法在簡單和復雜障礙物環境下的對比結果可知,本文的CLGWO 算法優于其他5 種算法,路徑轉折少,能得到全局最優值,證明了CLGWO 算法在無人機三維路徑規劃實驗中取得了良好的路徑尋優效果。
4 結論
針對傳統GWO 算法存在的精度低、收斂速度慢等問題,本文提出了一種改進的混合灰狼優化算法———CLGWO,應用于無人機三維路徑規劃。根據仿真實驗結果,可以得出以下結論:
① 為了克服GWO 算法采用隨機初始化的方式,引入Cat 混沌映射和反向學習策略,增加了灰狼種群的多樣性;提出構建新型非線性收斂因子,有效提高了全局搜索能力,減少了平均迭代次數;在位置更新階段,提出融合LSO 算法的擾動因子來更新灰狼個體位置,并通過引入動態權重,使算法能夠精確地準確鎖定全局最優解,避免陷入局部最優。
② 測試函數實驗表明,與GWO、AGWO、TGWO、HGWO、LSO 算法相比,CLGWO 算法具有較好的收斂效果和尋優精度。
③ 無人機三維路徑規劃仿真證明,在簡單和復雜障礙物環境中,與其他5 種算法相比,CLGWO 算法的路徑尋優和收斂速率等方面具有一定的優越性。
④ 未來在CLGWO 算法的基礎上進行深入研究,在確保路徑尋優精度的同時,提高無人機飛行路徑的平滑性和對復雜地形環境的適應性。此外,通過毫米波雷達傳感器的環境感知,將CLGWO 算法運用到無人機局部避障,可以有效地改善無人機的導航性能和穩定性。
參考文獻
[1] YAO J Y,SHA Y B,CHEN Y L,et al. IHSSAO:An Improved Hybrid Salp Swarm Algorithm and AquilaOptimizer for UAV Path Planning in Complex Terrain[J]. Applied Sciences,2022,12(11):5634.
[2] 陳明強,李奇峰,馮樹娟,等. 基于改進粒子群算法的無人機三維航跡規劃[J]. 無線電工程,2023,53(2):394-400.
[3] 羅銀輝,李榮枝,潘正宵,等. 多約束的無人機動態路徑規劃算法研究[J]. 無線電工程,2023,53(1):11-17.
[4] 許樂,趙文龍. 基于新型灰狼優化算法的無人機航跡規劃[J]. 電子測量技術,2022,45(5):55-61.
[5] 蘇菲. 基于改進蝙蝠算法的無人機三維路徑規劃[J].無線電工程,2022,52(12):2229-2236.
[6] 劉志強,何麗,袁亮,等. 采用改進灰狼算法的移動機器人路徑規劃[J]. 西安交通大學學報,2022,56(10):49-60.
[7] LIU J Y,WEI X X,HUANG H J. An Improved Grey WolfOptimization Algorithm and Its Application in Path Planning[J]. IEEE Access,2021,9:121944-121956.
[8] 白文杰,賈新春,呂騰. 改進麻雀搜索算法在三維路徑規劃中的應用[J]. 控制工程,2022,29(10):1800-1809.
[9] MIRJALILI S,MIRJALILI S M,LEWIS A. Grey Wolf Optimizer[J]. Advances in Egengineering Software,2014,69:46-61.
[10] DEWANGAN K R,SHUKLA A,GODFREY W W. ThreeDiensional Path Planning Using Grey Wolf Optimizer forUAVs[J]. Applied Intelligence,2019,49(6):2201-2217.
[11] LI Y,LIN X X,LIU J S. An Improved Grey Wolf Optimization Algorithm to Solve Engineering Problems[J]. Sustainability,2021,13(6):3208.
[12] 滕志軍,呂金玲,郭力文,等. 一種基于Tent 映射的混合灰狼優化的改進算法[J]. 哈爾濱工業大學學報,2018,50(11):40-49.
[13] 石春花,劉環. 基于正余雙弦自適應灰狼優化算法的醫藥物流配送路徑規劃[J]. 數學的實踐與認識,2020,50(14):114-127.
[14] 王永琦,江瀟瀟. 基于混合灰狼算法的機器人路徑規劃[J]. 計算機工程與科學,2020,42(7):1294-1301.
[15] 徐辰華,李成縣,喻昕,等. 基于Cat 混沌與高斯變異的改進灰狼優化算法[J]. 計算機工程與應用,2017,53(4):1-9.
[16] QU S T,DOU Y K,WANG Y C,et al. Path Planning ofElectric Power Inspection Robot Based on Improved LionSwarm Algorithm [C]∥IEEE 5th Conference on EnergyInternet and Energy System Integration (EI2). Taiyuan:IEEE,2021:3335-3339.
[17] XIN J F,LI S X,SHENG J L,et al. Application of ImprovedParticle Swarm Optimization for Navigation of UnmannedSurface Vehicles[J]. Sensors,2019,19(14):3096.
[18] PHUNG M D,HA Q P. Safetyenhanced UAV Path Planning with Spherical Vectorbased Particle Swarm Optimization[J]. Applied Soft Computing,2021,107:107376.
[19] HE M,HONG L,YANG Z Y,et al. Bioactive Assay andHyphenated Chromatography Detection for Complex Supercritical CO2 Extract from Chaihu Shugan San Using anExperimental Design Approach[J]. Microchemical Journal,2018,142:394-402.
作者簡介
王海群 女,(1968—),碩士,副教授,碩士生導師。主要研究方向:智能檢測與無人機避障。
鄧金銘 男,(1996—),碩士研究生。主要研究方向:無人機路徑規劃。
張 怡 女,(1983—),博士,副教授,碩士生導師。主要研究方向:分布式預測控制。
曹清萌 女,(1998—),碩士研究生。主要研究方向:智能檢測技術。
基金項目:國家自然科學基金(61803154);河北省自然科學基金(F2019209553)
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
