
基于CAN總線的油氣懸架系統設計
2024-07-30 00:00:00周元豪陳利東胡海潮魏志強張霞霞劉正
汽車電器 2024年7期






收稿日期:2023-11-09
作者簡介
周元豪,工程師,從事汽車電器設計、電控系統、智能網聯等相關技術研究工作。
【摘 要】文章以8×8重型越野汽車為例,在車輛加裝油氣懸架的基礎上,設計一種基于CAN總線的油氣懸架控制系統。該系統包含多種模式和多種動作,具備故障診斷和安全保護機制,更加有利于滿足用戶的使用需求,靈活適應不同工況對車身高度和姿態的調節要求。
【關鍵詞】重型越野汽車;油氣懸架;CAN總線
中圖分類號:U463.6 文獻標識碼:A 文章編號:1003-8639( 2024 )07-0046-03
Design of Hydropneumatic Suspension System Based on CAN Bus
ZHOU Yuanhao,CHEN Lidong,HU Haichao,WEI Zhiqiang,ZHANG Xiaxia,LIU Zheng
(Shaanxi Heavy Duty Automobile Co.,Ltd.,Xi'an 710200,China)
【Abstract】This article starts with 8×8 heavy-duty off-road vehicles as an example,based on the installation of hydraulic and pneumatic suspension in the vehicle,a hydraulic and pneumatic suspension control system based on CAN bus was designed. The system includes multiple modes and actions,and has fault diagnosis and safety protection mechanisms,which is more conducive to user needs and flexibly adapts to the adjustment requirements of body height and posture under different working conditions.
【Key words】heavy off-road vehicle;hydropneumatic suspension;CAN bus
1 前言
油氣懸架作為一種新型的車輛懸架技術,它融合了液壓傳動控制技術和懸架技術,對車輛底盤的操穩性、行駛平順性和通過性等有著決定性的作用。與傳統機械懸架相比,油氣懸架具有支撐力大、減振性好、姿態靈活可調、剛度和阻尼可控等優點,是現代重型越野車輛發展的關鍵技術之一,應用前景也非常廣闊。
在汽車工業發展的今天,電子通信、智能網聯、機電液一體化等技術快速發展,以懸架系統為例,傳統的純機械式、液壓式懸架無法滿足更加多元化的使用要求,而油氣懸架系統一般包括油氣彈簧、液壓調節系統和電控系統等,電控系統作為其中的關鍵部分,決定著懸架系統性能的好壞。為適應車輛底盤線控化、智能化和無人化的發展需求,懸架系統特別是控制系統設計是否合理,性能是否優劣,功能是否完善,就顯得尤為重要。
目前,很多車輛都配備了油氣懸架系統,也存在一定的問題,比如:功能單一、可控傾斜角度小、環境適應性和改裝性較差;電控系統復雜,控制器等硬件成本偏高;開發方法不符合AUTOSAR架構,通用化程度低,可移植性不強;人機交互不友好,集成化不高;控制系統外部接口無法滿足線控化、無人化需求,特別是未來越野車輛底盤綜合控制對電控系統的高要求。
本文以8×8重型全驅越野車輛為例,通過在車輛左前、右前、左后、右后4個輪邊安裝油氣彈簧,通過控制器控制油氣彈簧充油、放油實現懸架行程的變化,并實現懸架系統的多模式、多動作控制,最終實現車輛高度和姿態的調節。
2 技術方案
2.1 系統組成
油氣懸架控制系統包括懸架控制器、集成式顯控單元、懸架總調節開關、車姿控制閥組、主控制閥、蓄能器電磁閥組、高度位移傳感器、傾角傳感器、控制線纜和各通信接口及整個液壓調節系統。
控制系統采用CAN總線的控制方式,由懸架控制器接收集成式顯控單元發送的CAN總線命令(包括模式命令和動作命令),并采集高度傳感器和傾角傳感器數據,按照一定的策略輸出控制車姿控制閥、主控制閥或蓄能器電磁閥組通斷電,通過油氣彈簧的充放油來實現車輛車高升降、車姿調節和剛性閉鎖。油氣懸架控制系統原理如圖1所示。
控制方法包括模式控制、動作控制、剛性閉鎖控制、多高度標定控制、遠程控制和故障處理機制等。
2.2 工作模式及實現方式
為應對越野車輛不同的工況和使用需求,油氣懸架系統設計有10種工作模式,具體包括自動整車、手動整車、手動左前、手動右前、手動左后、手動右后、手動前橋、手動后橋、手動左側和手動右側,如圖2所示。任意兩個模式之間均可切換,每種工作模式包括等待和激活狀態,當前工作模式處于激活狀態時不響應其他模式的控制命令,當前工作模式結束動作進入等待狀態時才允許切換到其他模式。系統默認為自動整車模式。
為確保車輛安全,懸架在工作時需滿足車輛空擋且駐車,否則操作懸架功能按鍵不響應。另外,為保證一定的響應速度,懸架工作時發動機會自動上升轉速,確保懸架系統有充足的油壓。懸架控制系統還具備故障診斷功能和處理機制,故障模式為最高優先級,發生故障時任何動作都強制停止,故障信息以J1939 DM1形式通過CAN總線發送至集成式顯控單元。
2.2.1 自動整車模式
自動整車模式包括上升、中位、下降、前傾、后仰、左傾、右傾和調平8種動作。所有動作命令由集成式顯控單元通過CAN總線發送給懸架控制器。由于是自動模式,故所有命令均通過單擊按鍵來實現。進入自動整車模式后,若無任何動作或任意動作結束則系統進入默認狀態。默認狀態包含等待子狀態和按鍵復位子狀態,若系統初始化,則進入等待子狀態,若某一動作結束,則進入按鍵復位子狀態,延遲時間 t 秒后,再回到等待子狀態。
自動整車模式每種動作都包括等待子狀態和激活子狀態。以上升動作為例,若單擊按下上升按鍵,則系統從默認狀態進入上升動作狀態,并控制各車姿電磁閥組通斷電,完成相應的動作;進入上升動作的同時同步進入激活子狀態,按鍵取消后再回到上升動作等待子狀態,并將按鍵標志位置1。若在上升動作執行過程中再次單擊該按鍵,則停止執行上升動作,此為急停功能,同時將按鍵標志位置0。若上升動作結束,則返回值默認狀態,同時根據按鍵標志位選擇進入等待子狀態(按鍵標志位為0時)或是按鍵復位子狀態(按鍵標志位為1時)。其余動作控制原理類似,不再贅述。需要說明的是,若某一動作按鍵執行過程中單擊其他動作按鍵則不響應。自動整車模式下各動作邏輯控制如圖3所示。
2.2.2 手動整車模式
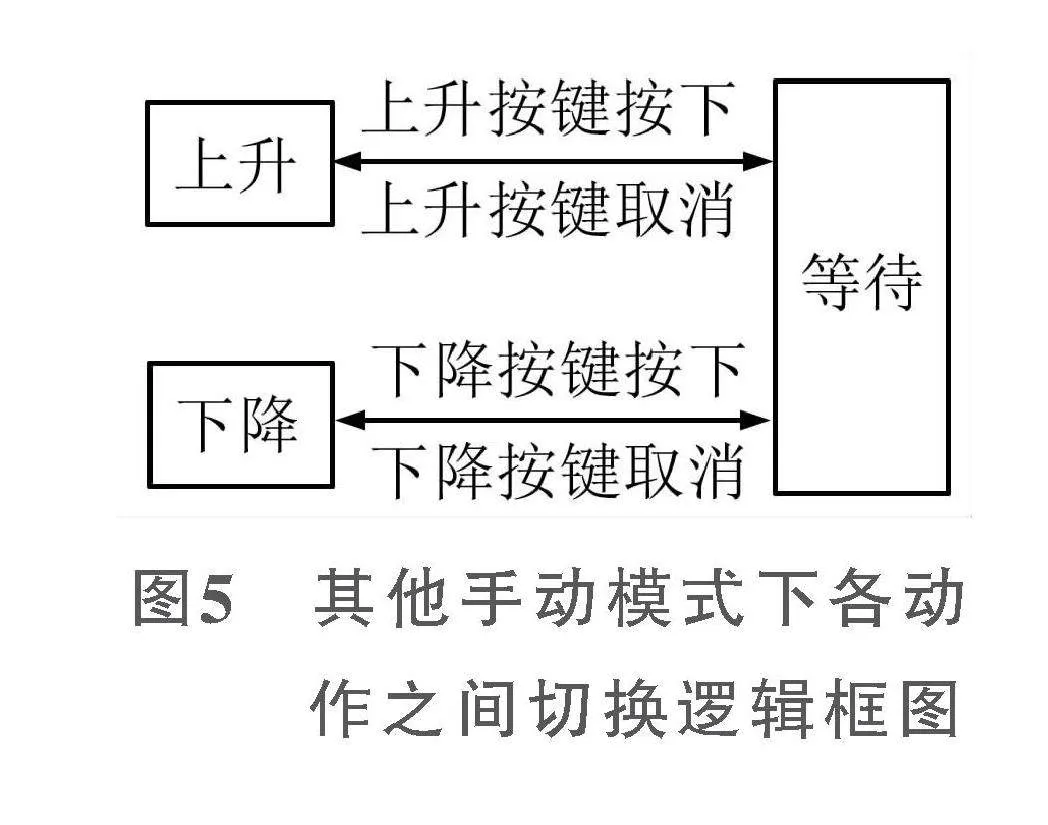
手動整車模式包括上升、下降、前傾、后仰、左傾和右傾6種動作。所有動作命令由集成式顯控單元通過CAN總線發送給懸架控制器。由于是手動模式,故所有命令均通過長按按鍵來實現。根據前文所述,選擇進入該工作模式后,系統首先進入等待狀態,若長按某一動作按鍵,則系統從等待狀態進入當前動作狀態,控制各電磁閥通斷電,完成相應的動作。若按鍵取消,則系統從當前動作狀態返回等待狀態,各電磁閥斷電,系統停止。手動整車模式下各動作之間切換邏輯控制如圖4所示。其余手動模式只包括上升和下降2個動作,控制方法與手動整車類似,如圖5所示,這里不再贅述。
2.2.3 閉鎖功能
為適應不同工況的懸架剛度需求,油氣懸架系統具備多剛度可調功能,通過控制蓄能器閥組是否參與工作實現系統的剛性閉鎖或柔性支撐。而系統處于閉鎖時的剛度可根據蓄能器初始充氣壓力和體積決定。
系統剛性閉鎖控制流程如圖6所示,閉鎖功能不受工作模式限制,閉鎖狀態下油氣懸架剛度最大。
2.2.4 標定功能
根據自動模式的控制要求,懸架在到達目標高度時會自動停止動作,需要對懸架目標高度位置(上升、中位、下降)和水平位置進行標定。所有標定操作由集成式顯控單元完成,標定數據可在顯控單元顯示。
一鍵式自動標定控制流程如圖7所示,系統標定包括高位、中位、低位高度標定和調平標定。以高位標定為例,接通懸架總調節開關,車輛底盤空擋且駐車,然后通過不同手動模式組合將懸架系統調至設計目標高度(通過集成式顯控單元界面查看),然后按下集成式顯控單元上的高位標定按鍵,系統會自動將4個高度傳感器的位移信息存儲在懸架控制器EEPROM中,該標定數據用于自動模式下的高度調節功能。其他標定功能與此類似,不再贅述。
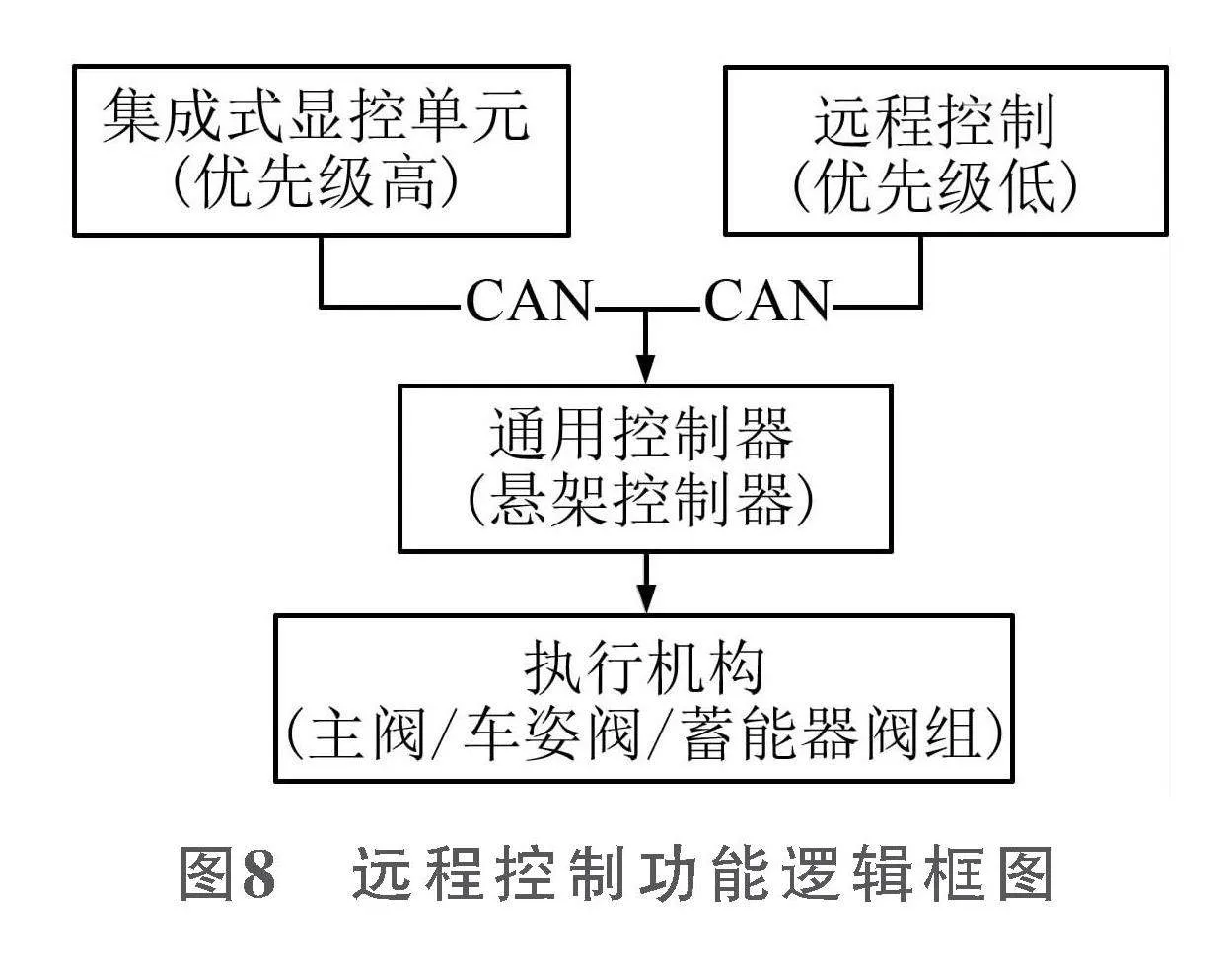
2.2.5 遠程控制功能
在一些特殊使用場合,需要對油氣懸架進行遠程控制,懸架控制器預留有與遠程控制通信的總線接口,根據總線通信矩陣,可由遠程控制端發送指令控制油氣懸架車高和車姿的調節。為避免沖突,遠程控制的優先級低于集成式顯控單元。遠程控制功能邏輯框圖如圖8所示。
2.3 人機交互設計
油氣懸架系統通過集成式顯控單元操作,該顯控單元采用觸摸方式,能夠實現控制指令下發和系統狀態監測。
油氣懸架交互界面包括主控制界面、工作模式控制界面、動作控制界面、標定界面、狀態信息界面、總線狀態界面及故障診斷界面,如圖9~圖10所示。界面操作包括長按和短按。
3 結論
本文介紹了一種基于CAN總線控制油氣懸架系統的設計方案及實現方式,與傳統油氣懸架系統相比具有以下優勢。
1)包含多種模式和動作,更加有利于用戶的使用需求,靈活適應不同工況對車身高度和姿態的要求。
2)基于CAN總線的控制方式,符合J1939協議,信息傳輸更加高效,容錯率提高,線束極大減少。
3)以集成式顯控單元作為人機交互終端,區別于傳統實體控制面板,控制更加靈活多變,數據交互更加豐富直觀,智能化程度進一步提高。
4)具備故障處理機制和急停功能。發生故障時,系統故障優先級最高,強制停止所有功能,進入自保護狀態,同時故障信息以CAN報文DM1形式發送至集成式顯控單元,供操作人員排查故障。同時,緊急情況下,再次按下當前動作按鍵實現一鍵式急停功能。
5)系統具備遠程控制功能,通過預留的遠程控制CAN總線接口可實現遠程,甚至無線控制懸架系統,滿足未來車輛更加無人化和智能化的發展需求。
6)傳統的標定工作需要人為用測量工具測量后,再通過復雜的實體按鍵實現標定,時間長、操作復雜、人為誤差因素大。該系統具備智能化一鍵式標定功能,只需在集成式顯控單元上簡單操作即可實現位置標定工作,標定數據可實時顯示在界面上。
參考文獻:
[1] SAE J1939/71:2008,Vehicle Application Layer[S].
[2] 余志生. 汽車理論(第5版)[M]. 北京:機械工業出版社,2009.
(編輯 楊凱麟)
