基于EGWO-LSTM-LSM算法的TOF定位研究
2024-08-23 00:00:00柯希孫潔
無(wú)線電工程 2024年7期
關(guān)鍵詞:卡爾曼濾波


摘 要:針對(duì)最小二乘法(Least Squares Method,LSM) 對(duì)于超寬帶(Ultra Wide Band,UWB) 中飛行時(shí)間(Time ofFlight,TOF) 法在非視距(Non Line of Sight,NLoS) 下定位精度低下的問(wèn)題,提出了基于擴(kuò)展灰狼算法(Extended GrayWolf Algorithm,EGWO) 優(yōu)化后的長(zhǎng)短期記憶(Long Short-Term Memory,LSTM) 網(wǎng)絡(luò)改進(jìn)LSM 定位算法(EGWO-LSTM-LSM)。采用LSTM 及改進(jìn)的EGWO 建立最優(yōu)測(cè)距誤差預(yù)測(cè)模型,根據(jù)預(yù)測(cè)結(jié)果構(gòu)造權(quán)重矩陣,在LSM 上加權(quán)計(jì)算,并添加測(cè)距誤差校正項(xiàng),以改進(jìn)LSM 實(shí)現(xiàn)靜態(tài)定位,并結(jié)合卡爾曼濾波器(Kalman Filter,KF) 實(shí)現(xiàn)動(dòng)態(tài)定位追蹤。仿真結(jié)果表明,EGWO-LSTM 預(yù)測(cè)準(zhǔn)確率達(dá)98. 857% ,EGWO-LSTM-LSM 將二維和三維位置誤差分別穩(wěn)定控制在10 ~ 25 mm,進(jìn)一步提升了TOF 定位精度。
關(guān)鍵詞:飛行時(shí)間;擴(kuò)展灰狼算法;改進(jìn)最小二乘法;長(zhǎng)短期記憶;卡爾曼濾波
中圖分類號(hào):TP312 文獻(xiàn)標(biāo)志碼:A 開放科學(xué)(資源服務(wù))標(biāo)識(shí)碼(OSID):
文章編號(hào):1003-3106(2024)07-1767-12
0 引言
超寬帶(Ultra Wide Band,UWB)是一種無(wú)載波通信技術(shù),能夠在短距離范圍內(nèi)利用納秒至微秒級(jí)的非正弦波窄脈沖以幾十微瓦的功耗完成數(shù)據(jù)傳輸。其二維定位精度已至毫米級(jí),在軍事及民用領(lǐng)域應(yīng)用廣泛[1-3]。
UWB 定位有飛行時(shí)間(Time of Flight,TOF)、到達(dá)時(shí)間差(Time Difference of Arrival,TDOA)、接收信號(hào)強(qiáng)度指示(Received Signal Strength Indication,RSSI)、到達(dá)時(shí)間(Time of Arrival,TOA)、到達(dá)角度(Angle of Arrival,AOA)等測(cè)距定位方法[4]。其中,TOF 定位相比于其他方式,具有高精度、適應(yīng)性強(qiáng)、支持多標(biāo)簽定位和對(duì)隱私的保護(hù)等優(yōu)勢(shì),在UWB技術(shù)中普遍應(yīng)用。但當(dāng)室內(nèi)非視距(Non Line ofSight,NLoS)噪聲較強(qiáng)時(shí),數(shù)據(jù)因丟包失真而發(fā)生異常波動(dòng)(通常是時(shí)延),根本無(wú)法測(cè)得準(zhǔn)確距離,使得室內(nèi)定位任務(wù)只能以失敗告終,甚至?xí)鹬卮笠馔馐鹿省R虼耍盘?hào)干擾下的TOF 精確定位問(wèn)題成為亟待解決的問(wèn)題,也是本文研究的方向。
UWB 中TOF 下的靜態(tài)直角坐標(biāo)解算方法以最小二乘法(Least Squares Method,LSM)求解非線性最小二乘解為主,對(duì)于動(dòng)態(tài)軌跡追蹤,則在LSM 的基礎(chǔ)上結(jié)合卡爾曼濾波器(Kalman Filter,KF)或其變體。LSM 算法假設(shè)誤差項(xiàng)具有相同方差,并且相互獨(dú)立,然而實(shí)際應(yīng)用中,NLoS 下的殘差項(xiàng)數(shù)值大小不均等在很大程度上左右運(yùn)算結(jié)果的準(zhǔn)確性和精確度,并且誤差項(xiàng)之間會(huì)存在相關(guān)和自相關(guān),導(dǎo)致了算法的低精度和無(wú)效性,針對(duì)這一問(wèn)題,國(guó)內(nèi)外諸多學(xué)者開展了研究,早在19 世紀(jì),高斯就已經(jīng)提出了加權(quán)LSM,為后續(xù)的研究者提供了寶貴的思路,之后的改進(jìn)都是以加權(quán)的方法為中心展開。Juan等[5]提出了無(wú)約束LSM 和基于特征值分析技術(shù)的約束加權(quán)LSM,可以抑制由于不準(zhǔn)確的TOF 估計(jì)引起的問(wèn)題,提高目標(biāo)定位的準(zhǔn)確性,并驗(yàn)證了所提出的約束加權(quán)方法的性能優(yōu)于無(wú)約束方法。Retscher等[6]通過(guò)3 種加權(quán)LSM 研究了UWB 測(cè)距觀測(cè)對(duì)全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)解算結(jié)果的影響,將區(qū)域內(nèi)的定位精度保持在50 mm 以內(nèi)。Tong 等[7]提出了新的加權(quán)LSM 提升了UWB 中TOF 的定位精度。Liu 等[8]通過(guò)給LSM 設(shè)置合適的權(quán)重計(jì)算移動(dòng)UWB 標(biāo)簽的位置,進(jìn)一步優(yōu)化定位結(jié)果。秦明峰等[9]提出了一種基于偽距殘差的自適應(yīng)加權(quán)LSM,在存在NLoS 下,能夠排除誤差較大的偽距對(duì)定位穩(wěn)定性的破壞,二維定位精度優(yōu)于20 cm,提升了算法的魯棒性。但以上研究成果都是基于LSM 算法進(jìn)行的二維定位研究,當(dāng)定位要求提升至三維空間時(shí),LSM 因其自身缺陷而使得定位能力急劇下降。胡仲勛等[10]認(rèn)為三維定位中的LSM 算法自身有2 點(diǎn)缺陷:其一是LSM 不是真正的三維擬合算法,實(shí)質(zhì)上只是一種二維平面內(nèi)最小二乘擬合的合成;其二是對(duì)三軸坐標(biāo)的差異很敏感。而在目前最新的研究成果中,劉公緒等[11]指出第二點(diǎn)缺陷的原因是由于LSM 定位存在定位死角,故得到與基站和標(biāo)簽存在某種幾何拓?fù)浼s束關(guān)系的奇異或近似奇異坐標(biāo)解,直接降低了定位算法的適用性,并在文獻(xiàn)[11]中詳細(xì)闡述了解決奇異解,提高算法魯棒性的參數(shù)微調(diào)法和空時(shí)自調(diào)節(jié)法。此次實(shí)驗(yàn)不對(duì)二維定位展開研究,因?yàn)椋蹋樱?算法在二維定位中并無(wú)死角,更不會(huì)產(chǎn)生奇異解,二維精度完全滿足需要。所以研究的重點(diǎn)同樣著眼于提升LSM 三維定位精度,不同的是并非著手于用數(shù)學(xué)公式的推導(dǎo)去優(yōu)化奇異解從而提升精度,而是引進(jìn)更為高端的人工智能技術(shù)和群智能算法的有機(jī)融合去改進(jìn)LSM,以此忽略或者減小奇異解帶來(lái)的影響,結(jié)合KF 濾波器作為輔助驗(yàn)證改進(jìn)算法定位的有效性。從逆向思維出發(fā),當(dāng)實(shí)驗(yàn)結(jié)果顯示精度得到提升時(shí),改進(jìn)算法可以有效降低奇異解所帶來(lái)的干擾。
本次實(shí)驗(yàn)思路來(lái)源于文獻(xiàn)[12]中利用機(jī)器學(xué)習(xí)模型提升LSM 二維精度的方法,考慮在此方法上進(jìn)行改進(jìn),并推廣至三維空間定位中。實(shí)驗(yàn)擬采用當(dāng)前熱門的神經(jīng)網(wǎng)絡(luò)模型和群智能算法相結(jié)合,構(gòu)建并優(yōu)化測(cè)距誤差預(yù)測(cè)模型,以計(jì)算最優(yōu)權(quán)重矩陣,從而改進(jìn)LSM,達(dá)到提高TOF 的三維定位精度的目的。實(shí)驗(yàn)主要內(nèi)容包括以下幾點(diǎn):
① 對(duì)傳統(tǒng)灰狼算法(Gray Wolf Algorithm,GWO)做出三方面改進(jìn),避免其陷入局部最優(yōu),并使全局和局部搜索達(dá)到平衡,以提升算法尋優(yōu)能力[13],為最優(yōu)測(cè)距誤差預(yù)測(cè)模型的優(yōu)化做好鋪墊,改進(jìn)的GWO 算法命名為擴(kuò)展灰狼算法(ExtendedGray Wolf Algorithm,EGWO)。
② 采用長(zhǎng)短時(shí)記憶(Long Short-Term Memory,LSTM)網(wǎng)絡(luò)并結(jié)合EGWO 算法構(gòu)建最優(yōu)測(cè)距誤差預(yù)測(cè)EGWO-LSTM 網(wǎng)絡(luò),完成LSM 的加權(quán)改進(jìn)的準(zhǔn)備工作。
③ 通過(guò)權(quán)重轉(zhuǎn)換函數(shù)以EGWO-LSTM 的輸出結(jié)果為基礎(chǔ),設(shè)置權(quán)重矩陣,對(duì)LSM 加權(quán)改進(jìn),并添加誤差校正項(xiàng),得到完整的EGWO-LSTM-LSM 改進(jìn)算法。
④ 對(duì)實(shí)驗(yàn)中的算法和模型設(shè)置對(duì)照組,并結(jié)合KF 算法驗(yàn)證改進(jìn)GWO 和LSM 的有效性。
1 TOF 測(cè)距及定位原理
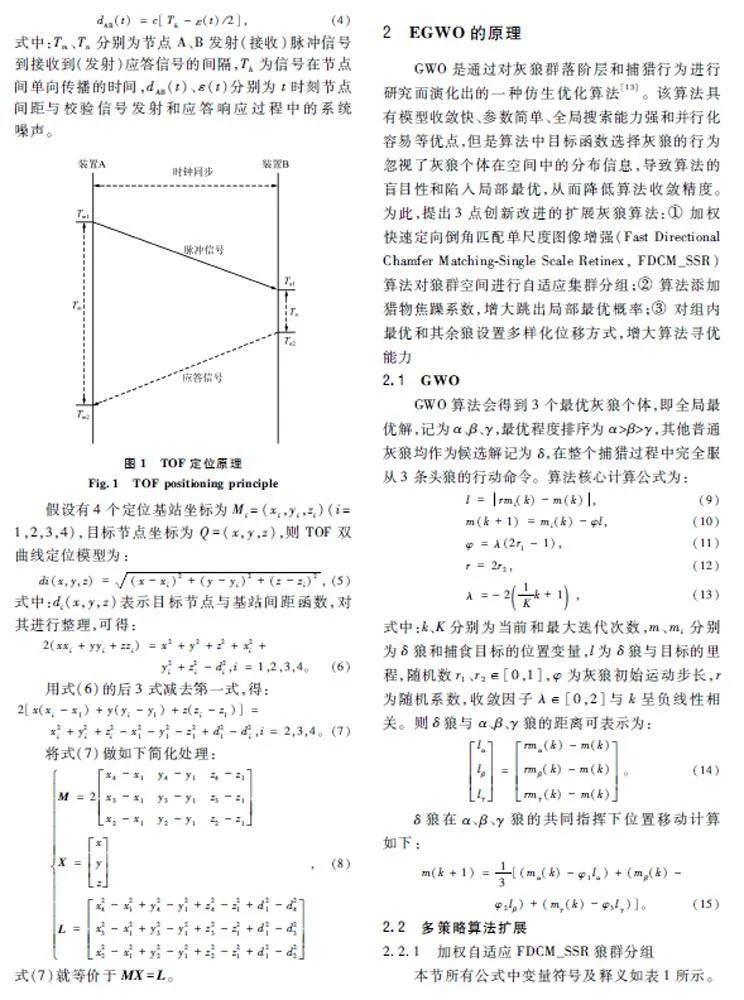
TOF 法是根據(jù)信號(hào)飛行的時(shí)間差確定距離的測(cè)距技術(shù),其原理如圖1 所示。設(shè)有節(jié)點(diǎn)A、B,2 節(jié)點(diǎn)時(shí)鐘始終嚴(yán)格同步,且時(shí)間戳獨(dú)立,A 向B 發(fā)射脈沖信號(hào),記其時(shí)間戳為Tm 1 ,B 在其時(shí)間戳Tn 1 收到信號(hào),并在其時(shí)間戳Tn 2 向A 發(fā)射應(yīng)答信號(hào),A 則在其時(shí)間戳Tm 2 收到B 的應(yīng)答信號(hào),由4 個(gè)時(shí)間戳可算出脈沖信號(hào)在節(jié)點(diǎn)間的單向傳播時(shí)間,乘以光速c得到待測(cè)距離。測(cè)距過(guò)程可表示為:
Tm = Tm2 - Tm1 ,(1)
Tn = Tn2 - Tn1 , (2)
Th = (Tm - Tn )/ 2, (3)
dAB(t) = c[Th - ε(t)/ 2], (4)
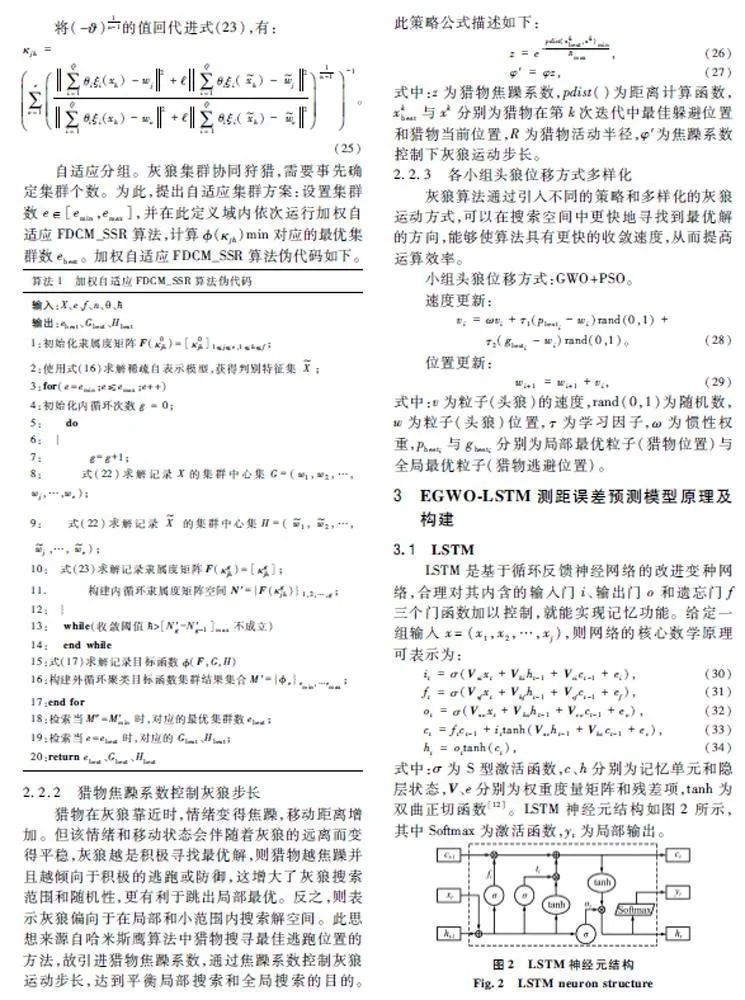
3. 2 EGWOLSTM 測(cè)距誤差預(yù)測(cè)模型
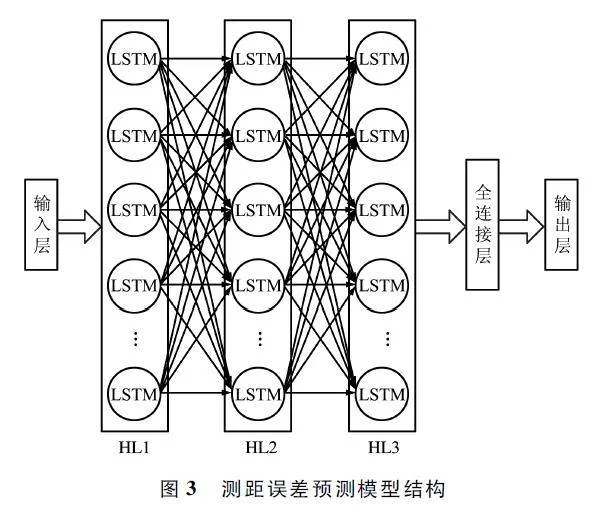
基于LSTM 構(gòu)建測(cè)距誤差預(yù)測(cè)模型[15],模型輸入為經(jīng)數(shù)據(jù)預(yù)處理的數(shù)據(jù)樣本,輸出為測(cè)距誤差。結(jié)構(gòu)上,以輸入層開始,系統(tǒng)中設(shè)置3 個(gè)隱層(HiddenLayer,HL),并級(jí)聯(lián)一個(gè)全連接層(Dense),每個(gè)隱層由若干個(gè)LSTM 神經(jīng)元集成,之間相互作用,由全連層匯集所有學(xué)習(xí)成果,最終以輸出層結(jié)束。整個(gè)結(jié)構(gòu)如圖3 所示。
將EGWO 用于LSTM 測(cè)距誤差預(yù)測(cè)模型的超參數(shù)優(yōu)化,訓(xùn)練之后得到EGWOLSTM 模型,并結(jié)合PSO、MGWO[16]、MCWO[17]、IGWO[18]和GWO 算法構(gòu)建多個(gè)預(yù)測(cè)模型,設(shè)置對(duì)比試驗(yàn),驗(yàn)證改進(jìn)灰狼算法的有效性。LSTM 模型待優(yōu)化參數(shù)和訓(xùn)練參數(shù)如表2所示。
4 EGWO-LSTM-LSM 定位算法基本原理
4. 1 LSM
LSM 因可以高效求解非線性雙曲線方程組而在UWB 等技術(shù)中廣泛應(yīng)用,也是本次實(shí)驗(yàn)算法改進(jìn)的目標(biāo)。根據(jù)式MX = L,間距函數(shù)di(x,y,z)的殘差可表示為Θ = MX-L,則殘差平方和函數(shù)計(jì)算如下:
η(X) = (MX - L) 2 = (MX - L)(MX - L) T 。(35)
對(duì)該式求導(dǎo),并令求導(dǎo)結(jié)果為0,得:
MT MX - MT L = 0。(36)
當(dāng)MTM 可逆時(shí),可得目標(biāo)節(jié)點(diǎn)的最小二乘解為:
X = (MT M)-1 MT L。(37)
4. 2 EGWO-LSTM-LSM 定位算法
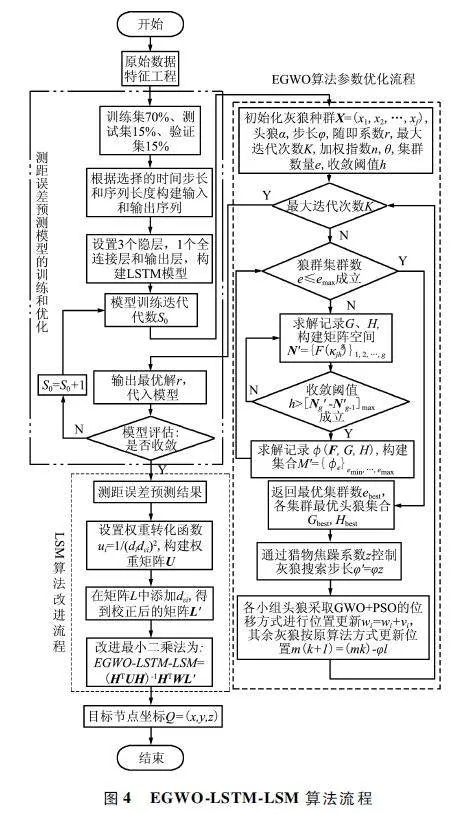
LSM 對(duì)殘差平方和函數(shù)中的每一項(xiàng)都采取無(wú)偏差處理和運(yùn)算,然而實(shí)際應(yīng)用中,NLoS 下的殘差項(xiàng)數(shù)值大小在很大程度上左右運(yùn)算結(jié)果的準(zhǔn)確性和精確度,這正是該算法弊端所在,針對(duì)這一點(diǎn),將第3 節(jié)建立的測(cè)距誤差預(yù)測(cè)模型預(yù)測(cè)結(jié)果一方面表示為誤差校正項(xiàng),另一方面采取對(duì)殘差大的項(xiàng)給予更大的比重,反之較小的規(guī)則,通過(guò)權(quán)重轉(zhuǎn)化函數(shù)映射為權(quán)重矩陣,并在LSM 中添加了這2 個(gè)模塊,建立起完整的改進(jìn)最小二乘定位模型(EGWO-LSTM-LSM)。具體流程如圖4 所示。
4. 2. 1 測(cè)距誤差權(quán)重矩陣
EGWO-LSTM 模型輸出最佳的測(cè)距誤差預(yù)測(cè)結(jié)果,其結(jié)果正是作為各分路殘差項(xiàng)權(quán)重設(shè)置的依據(jù),權(quán)重轉(zhuǎn)化函數(shù)如下:
ui = 1/(di dεi) 2 , (38)
式中:dεi 為測(cè)距誤差預(yù)測(cè)模型輸出結(jié)果,ui 為各分路殘差項(xiàng)權(quán)重。由式[38]可知,權(quán)重設(shè)置與各分路節(jié)點(diǎn)離基站距離、誤差大小呈反比,誤差大的權(quán)重小,誤差小的權(quán)重反而大,高權(quán)重就意味著測(cè)距數(shù)據(jù)更接近實(shí)際距離。將基于式(38)的權(quán)重因子整合為權(quán)重矩陣,并參與定位目標(biāo)的直角坐標(biāo)解算,LSM 表達(dá)式為:
LSMU = (MT UM)-1 MT UL。(39)
4. 2. 2 測(cè)距誤差校正項(xiàng)
在添加了測(cè)距誤差權(quán)重矩陣的基礎(chǔ)上,進(jìn)一步添加誤差校正項(xiàng)。本研究直接在測(cè)距數(shù)據(jù)上利用誤差預(yù)測(cè)模型輸出結(jié)果進(jìn)行校正,即將矩陣L 中的代數(shù)式修改為x2i+y2i+z2i-x21-y21-z21+d21-(di -dεi) 2 ,則最終改進(jìn)后的LSM 可表示為:
EGWO-LSTM-LSM = (MT UM)-1 MT UL′。(40)
5 仿真與結(jié)果分析
本實(shí)驗(yàn)采用Matlab 2020b 的CommunciationsToolbox 和Simulink 進(jìn)行動(dòng)態(tài)定位仿真,在JupyterNotebook 中結(jié)合Python 語(yǔ)言完成機(jī)器學(xué)習(xí)模型的訓(xùn)練和靜態(tài)定位仿真,運(yùn)行環(huán)境為Windows 10 平臺(tái)下的Intel(R)Core(TM)i7-8565U CPU@ 1. 80 GHz1. 99 GHz 處理器,8 GB 內(nèi)存。
5. 1 數(shù)據(jù)準(zhǔn)備與處理
本次實(shí)驗(yàn)是對(duì)三維空間中的定位研究,故最少需要4 個(gè)定位基站,選取5 000 mm × 5 000 mm ×4 500 mm 的采樣空間,并設(shè)定基站M1 = (0,0,4 300)mm,M2 = (5 000,0,1 700 )mm,M3 = (0,5 000,1 700)mm,M4 = (5 000,5 000,4 300)mm,隨機(jī)標(biāo)定234 個(gè)三維坐標(biāo)點(diǎn)位,以0. 2 s 時(shí)間步長(zhǎng)采集數(shù)據(jù),在每個(gè)點(diǎn)位生成234 組含有隨機(jī)NLoS 噪聲的樣本數(shù)據(jù),每組數(shù)據(jù)都包含了4 組測(cè)距值、噪聲大小和時(shí)間信息,表示在同一坐標(biāo)點(diǎn)位UWB 基站持續(xù)自動(dòng)采集到的多組靜態(tài)定位數(shù)據(jù)。同樣在該場(chǎng)景中,定義時(shí)間間隔和移動(dòng)速度,在每個(gè)時(shí)間步長(zhǎng)上更新節(jié)點(diǎn)位置,添加微小隨機(jī)位移,計(jì)算節(jié)點(diǎn)距離,并保存當(dāng)前時(shí)間步長(zhǎng)的節(jié)點(diǎn)位置和UWB 測(cè)量數(shù)據(jù),這樣就完成了動(dòng)態(tài)軌跡定位數(shù)據(jù)的仿真模擬。
對(duì)于數(shù)據(jù)處理,則采用3σ 準(zhǔn)則去除異常和粗大誤差,再以拉格朗日插值補(bǔ)全并歸一化即可。
5. 2 EGWO 超參數(shù)優(yōu)化
為了證明EGWO 算法的有效性,采用PSO、MG-WO、IGWO 和CGWO 和標(biāo)準(zhǔn)GWO 對(duì)國(guó)際標(biāo)準(zhǔn)單峰測(cè)試函數(shù)Schwefels-s 2. 22 / 2. 21 和多峰測(cè)試函數(shù)Rastrigin、Ackley 進(jìn)行求解,并統(tǒng)計(jì)和可視化各算法在對(duì)應(yīng)函數(shù)上運(yùn)行過(guò)程中的最優(yōu)適應(yīng)度數(shù)據(jù),對(duì)比結(jié)果如圖5 所示。
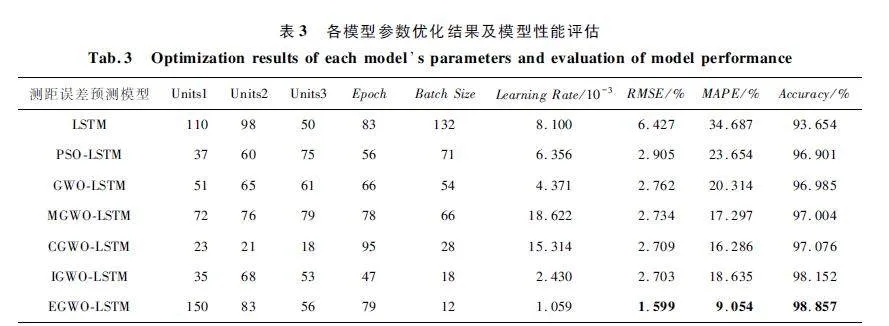
從圖5 不難看出,各算法在不同測(cè)試函數(shù)的求解過(guò)程中表現(xiàn)迥異,但EGWO 的最優(yōu)適應(yīng)度值曲線都在其余算法之下,證明了本次改進(jìn)灰狼算法的精度有所提高,同時(shí)具有最好的優(yōu)化結(jié)果。接下來(lái)將各算法用于LSTM 測(cè)距誤差預(yù)測(cè)模型的優(yōu)化,設(shè)置各算法初始種群數(shù)量為60,最大迭代次數(shù)200,采用均方根誤差(Root Mean Square Error,RMSE)、平均絕對(duì)值百分比誤差(Mean Absolute Percentage Error,MAPE)和準(zhǔn)確率(Accuracy)作為模型評(píng)估指標(biāo),優(yōu)化結(jié)果如表3 所示。
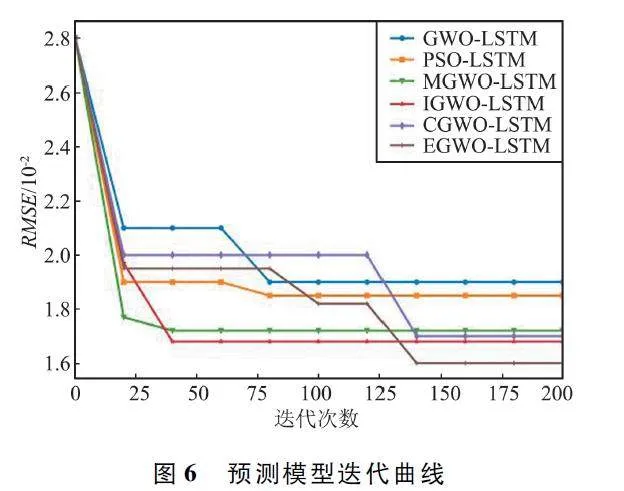
優(yōu)化過(guò)程的迭代曲線如圖6 所示。
可見,PSO-LSTM、MGWO-LSTM 和IGWO-LSTM在算法開始時(shí)就陷入了局部最優(yōu),并未進(jìn)行下一步迭代更新,GWO-LSTM 和CGWO-LSTM 雖在陷入局部最優(yōu)后進(jìn)行了一次迭代更新,但收斂精度并未達(dá)到最佳,而相比之下EGWO-LSTM 模型在規(guī)定的迭代次數(shù)下,對(duì)于其他算法表現(xiàn)出更高的優(yōu)化水平,這得益于對(duì)狼群的自適應(yīng)分組提高搜索效率,以及獵物焦躁系數(shù)的引入,使得算法能夠平衡全局搜索和局部搜索,頭狼位移的多樣化也改善了算法的收斂性,使之跳出局部最優(yōu)。該模型的MAPE、RMSE 相比于其余模型均有較大幅度的降低,同時(shí)也伴隨著準(zhǔn)確率的提升。其中MAPE 較LSTM 模型和GWO-LSTM 分別降低了25. 633% 和11. 26% ,RMSE 降低了4. 828% 和1. 163% ,模型準(zhǔn)確率則相應(yīng)提升了5. 203% 和1. 952 6% ,這一方面說(shuō)明單一LSTM 模型如果采用初始或默認(rèn)參數(shù),會(huì)極大程度忽略模型預(yù)測(cè)的潛力,另一方面說(shuō)明改進(jìn)算法EGWO 較傳統(tǒng)灰狼算法和其他改進(jìn)灰狼算法,有更優(yōu)越的尋優(yōu)和模型優(yōu)化能力。以上結(jié)果表明,通過(guò)引入加權(quán)自適應(yīng)FDCM_SSR 狼群分組和獵物焦躁系數(shù),以及控制小組頭狼位移的多樣化,能夠高效提升算法的有效性,從而得到最優(yōu)的訓(xùn)練模型。
5. 3 EGWO-LSTM-LSM 算法靜態(tài)定位
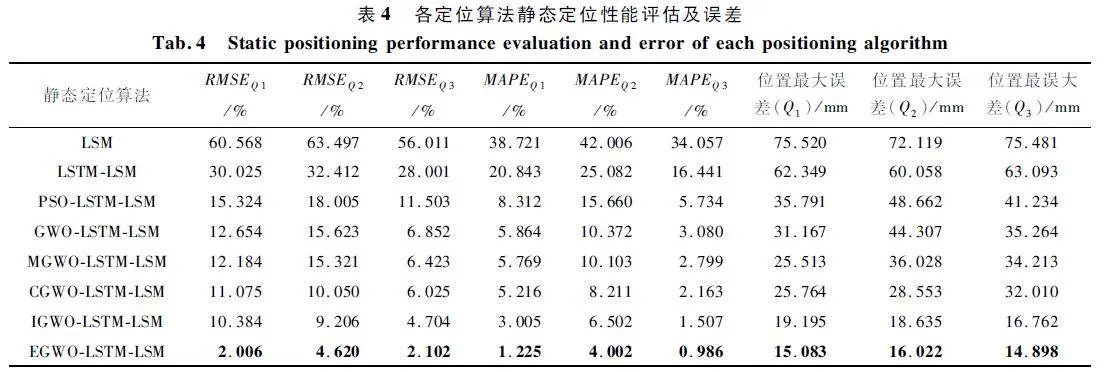
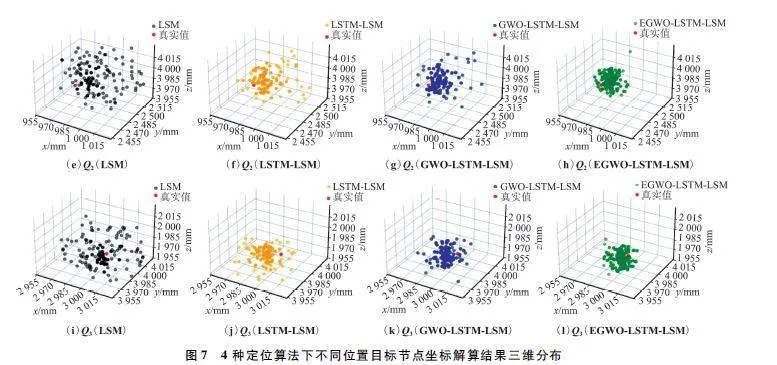
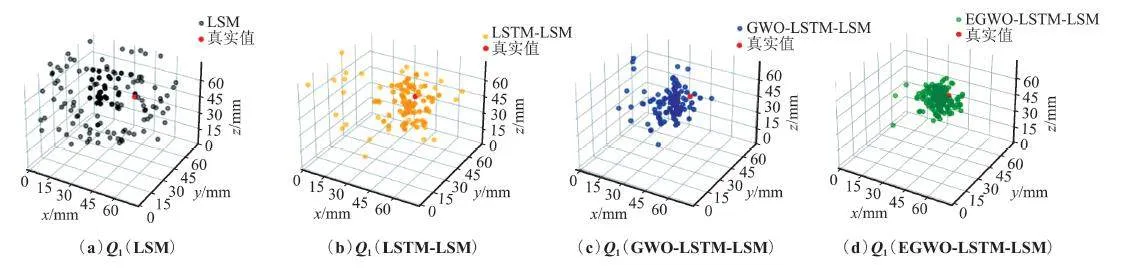
圖7 展示了234 個(gè)靜態(tài)目標(biāo)節(jié)點(diǎn)中的3 個(gè)不同位置節(jié)點(diǎn)Q1 = (30,72,30)mm、Q2 = (962,2 510,3 965)mm、Q3 = (2 992,4 007,1 960)mm 在LSM、LSTM-LSM、GWO-LSTM-LSM 和EGWO-LSTM-LSM定位算法下的三維直角坐標(biāo)解算結(jié)果。可知,傳統(tǒng)LSM 算法在三維定位中結(jié)果過(guò)于分散,精度低下,魯棒性較差。隨著LSM 算法多個(gè)環(huán)節(jié)的改進(jìn)優(yōu)化,定位結(jié)果漸漸收斂于目標(biāo)節(jié)點(diǎn)的真實(shí)坐標(biāo),在眾多定位算法中,又以所提EGWO-LSTM-LSM 算法靜態(tài)定位精度最高。為進(jìn)一步證實(shí),采用之前所有算法設(shè)置對(duì)照實(shí)驗(yàn)對(duì)比分析,定位結(jié)果如表4 所示。
由表4 可以看出,EGWO-LSTM-LSM 算法靜態(tài)定位RMSE、MAPE 和位置最大誤差在眾定位算法中最低,更是遠(yuǎn)小于單一LSM、LSTM-LSM 和GWO-LSTM-LSM 定位算法,相比于其余算法,3 節(jié)點(diǎn)靜態(tài)定位RMSE 平均降幅在5. 189% ~ 57. 116% ,MAPE平均降幅在1. 600% ~ 36. 190% ,3 節(jié)點(diǎn)靜態(tài)平均位置最大誤差降幅為2. 863 ~ 59. 039 mm。
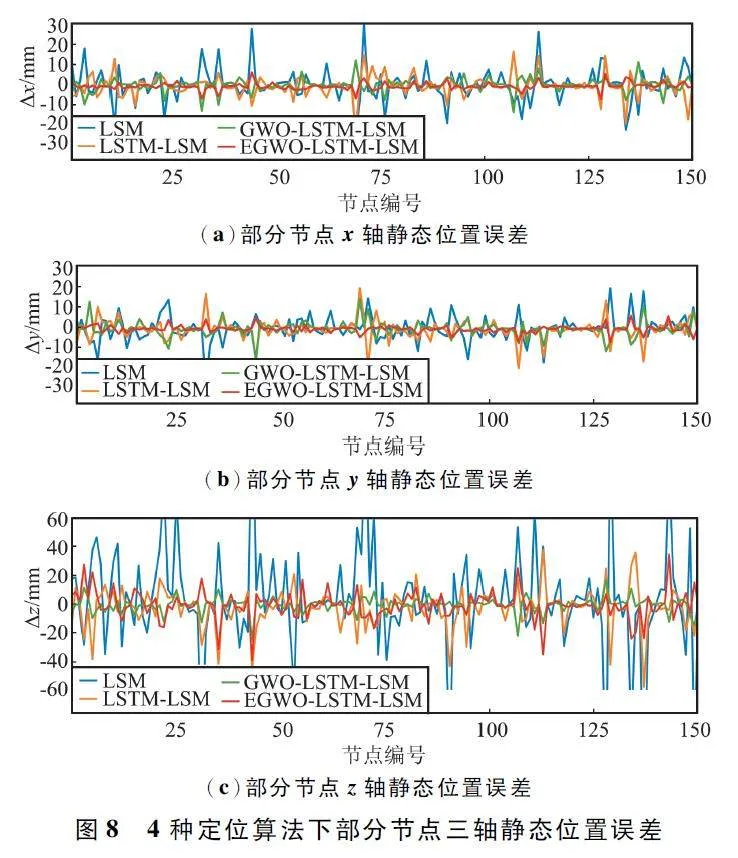
為詳細(xì)分析靜態(tài)位置誤差的分布[19],以LSM、LSTM-LSM、GWO-LSTM-LSM、EGWO-LSTM-LSM 算法為例,將部分節(jié)點(diǎn)在x、y、z 軸上的靜態(tài)位置誤差[20]繪在圖8 中。
分析圖中各曲線可知,這4 種算法靜態(tài)定位精度從優(yōu)到劣依次是EGWO-LSTM-LSM>GWO-LSTM-LSM>LSTM-LSM>LSM,在x 和y 軸的靜態(tài)誤差都控制在30 mm 以內(nèi),其中EGWO-LSTM-LSM 算法更是將二維靜態(tài)誤差穩(wěn)定縮減到8 mm 以內(nèi)。但這4 種算法在z 軸上定位精度有明顯下降,LSM 的靜態(tài)最大位置誤差甚至已超過(guò)50 mm,GWO-LSTM-LSM、LSTM-LSM 最大位置誤差也都突破25 mm,反觀EGWO-LSTM-LSM 算法,則將靜態(tài)誤差穩(wěn)定保持在25 mm 內(nèi)。
綜合以上分析,可知靜態(tài)定位算法的位置誤差主要分布在z 軸方向,這來(lái)源于算法定位死角產(chǎn)生的奇異解,本實(shí)驗(yàn)的EGWO-LSTM-LSM 算法將二維靜態(tài)定位誤差降至8 mm 內(nèi),三維靜態(tài)定位誤差降至25 mm 內(nèi),相比于其余基于LSM 的定位算法,改進(jìn)LSM 定位算法在二維和三維的靜態(tài)定位精度都已經(jīng)得到更大程度的提升,這也從側(cè)面說(shuō)明算法的改進(jìn)有效減小了奇異解對(duì)三維靜態(tài)定位結(jié)果的干擾。
5. 4 EGWO-LSTM-LSM 算法+KF 動(dòng)態(tài)定位
LSM 算法主要用于擬合靜態(tài)數(shù)據(jù),并找到最佳擬合曲線或平面。在這種情況下,LSM 算法并不直接適用于動(dòng)態(tài)軌跡的追蹤。動(dòng)態(tài)軌跡追蹤通常涉及根據(jù)實(shí)時(shí)或連續(xù)的輸入數(shù)據(jù),預(yù)測(cè)或估計(jì)物體的位置、速度或姿態(tài)等變化信息,故考慮結(jié)合KF 濾波器。KF 算法應(yīng)用普遍并且不是研究重點(diǎn),這里就不再贅述。
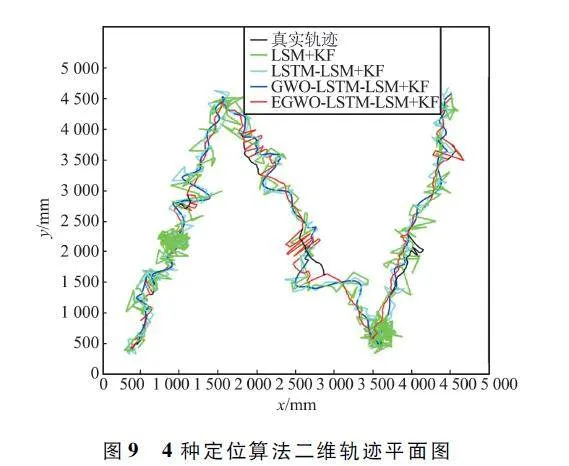
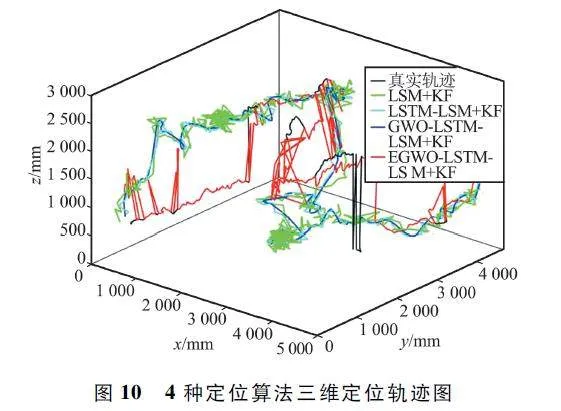
LSM、LSTM-LSM、GWO-LSTM-LSM、EGWO-LSTM-LSM 定位算法結(jié)合KF 算法三維定位軌跡的平面視角和空間視角如圖9 和圖10 所示。結(jié)合2 個(gè)視角可以看到仿真的軌跡呈一個(gè)各處高低不同的“N”字,并且在2 個(gè)視角下,能夠更全面觀察和分析動(dòng)態(tài)定位的結(jié)果。從圖9 可以看出,在二維平面內(nèi),單一LSM 直接結(jié)合KF 的動(dòng)態(tài)定位效果并不理想,對(duì)于隨機(jī)NLoS 噪聲的抑制欠缺更有效的措施。但隨著各種LSTM 測(cè)距誤差預(yù)測(cè)模型的應(yīng)用,LSM算法定位精度也在明顯提高,通過(guò)對(duì)比,本文的EGWO-LSTM-LSM 定位二維軌跡全程最為貼近真實(shí)軌跡[21]。
在三維視角下,針對(duì)z 軸動(dòng)態(tài)位置誤差展開分析,從圖中能夠直觀看到EGWO-LSTM-LSM 結(jié)合KF在3 軸上的動(dòng)態(tài)位置誤差最小,其余算法在z 軸上的動(dòng)態(tài)位置誤差明顯要高于x、y 軸上的誤差,動(dòng)態(tài)定位精度有待提升。通過(guò)對(duì)比,EGWO-LSTM-LSM定位三維軌跡全程最為貼近真實(shí)軌跡。這同樣說(shuō)明了算法的改進(jìn)在減小奇異解對(duì)三維動(dòng)態(tài)定位結(jié)果的干擾方面仍然有效。
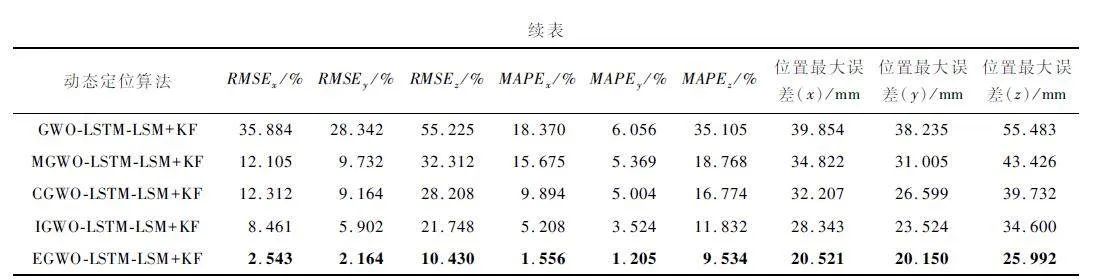
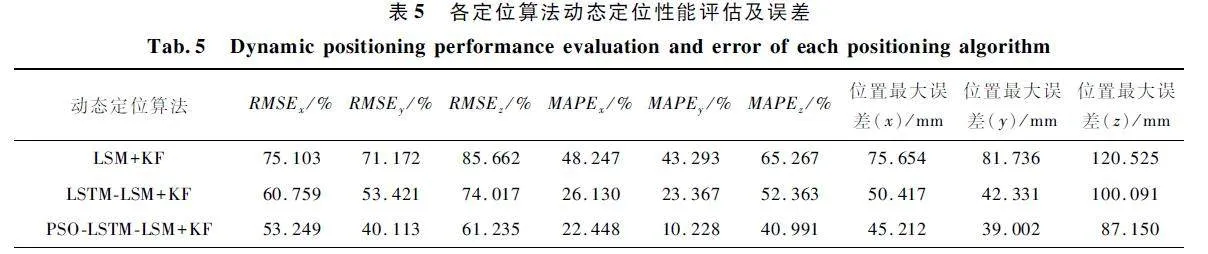
為說(shuō)明EGWO-LSTM-LSM+KF 動(dòng)態(tài)定位的有效性,依舊以所有算法為基礎(chǔ)設(shè)置對(duì)照組,各算法動(dòng)態(tài)定位結(jié)果如表5 所示。
由表5 可以看出,EGWO-LSTM-LSM+KF 算法動(dòng)態(tài)定位在3 軸上的RMSE、MAPE 和位置最大誤差在眾定位算法中最低,同樣遠(yuǎn)小于單一LSM、LSTM-LSM和GWO-LSTM-LSM 定位算法,相比于其余算法,動(dòng)態(tài)定位RMSE 三軸平均降幅在6. 99%~ 72. 27% ,MAPE三軸平均降幅在2. 756%~ 48. 171% ,3 軸平均動(dòng)態(tài)位置最大誤差降幅在6. 601~ 70. 417 mm。
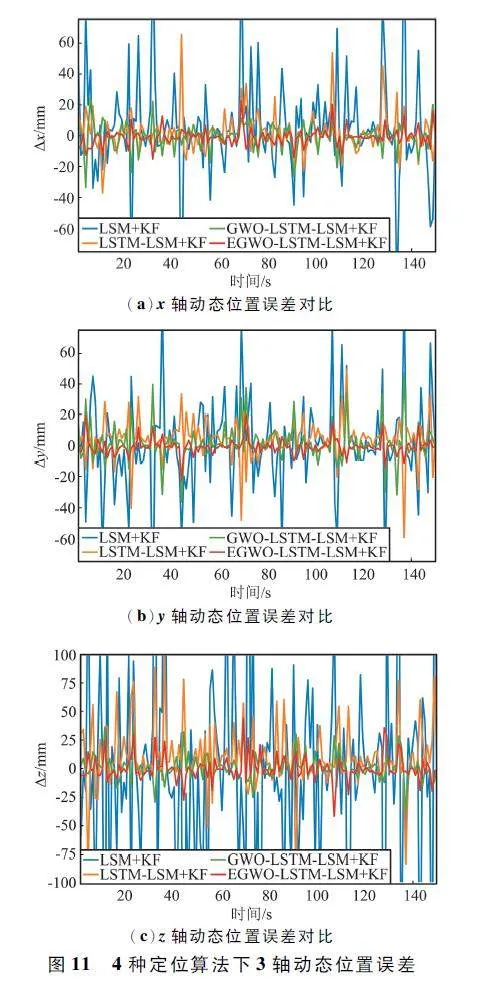
為進(jìn)一步分析算法的動(dòng)態(tài)定位性能,將4 種算法動(dòng)態(tài)定位的3 軸位置誤差做了統(tǒng)計(jì)和對(duì)比,如圖11 所示。可知這4 種算法動(dòng)態(tài)定位精度從優(yōu)到劣依次是EGWO-LSTM-LSM+KF>GWO-LSTM-LSM+KF>LSTM-LSM+KF>LSM+KF,EGWO-LSTM-LSM 算法結(jié)合KF 將x 和y 軸上的動(dòng)態(tài)位置誤差控制在20 mm 內(nèi),相對(duì)于單個(gè)LSM 降低了70 mm 左右,z 軸上的動(dòng)態(tài)位置誤差控制在25 mm 內(nèi),相對(duì)于單個(gè)LSM 降低了75 mm 左右,其3 軸動(dòng)態(tài)定位精度均高于其他算法,這能夠充分證明本文定位算法在二維和三維空間的動(dòng)態(tài)定位中有更大的優(yōu)勢(shì)和優(yōu)秀的魯棒性。
6 結(jié)束語(yǔ)
針對(duì)UWB 中LSM 對(duì)于TOF 在NLoS 下定位精度低下的問(wèn)題,提出了改進(jìn)最小二乘法(EGWO-LSTM-LSM)的定位算法。采用LSTM 與改進(jìn)GWO相結(jié)合的方法,構(gòu)建了最優(yōu)模型預(yù)測(cè)測(cè)距誤差,并以此設(shè)置權(quán)重矩陣和誤差校正項(xiàng),將改進(jìn)后的算法通過(guò)定位仿真實(shí)驗(yàn)對(duì)比驗(yàn)證。實(shí)驗(yàn)結(jié)果表明,改進(jìn)算法將二維和三維位置誤差分別穩(wěn)定控制在10、25 mm 內(nèi),相比于其余算法有效抑制了隨機(jī)NLoS的干擾,增強(qiáng)了LSM 算法的魯棒性,對(duì)TOF 的三維定位精度有一定的提升,同時(shí)也反過(guò)來(lái)證明改進(jìn)算法能夠在較大程度上降低奇異解在三維靜態(tài)和動(dòng)態(tài)定位下在z 軸方向產(chǎn)生的影響。
經(jīng)過(guò)對(duì)照試驗(yàn),所提改進(jìn)算法在定位精度上要優(yōu)于單個(gè)LSM 算法和其余基于機(jī)器學(xué)習(xí)模型和群智能算法的改進(jìn)算法,初步從理論上證明了改進(jìn)算法的有效性。但要驗(yàn)證算法的實(shí)用性,還需要將理論用于實(shí)踐,并接受實(shí)踐的檢驗(yàn),因此,設(shè)置實(shí)際場(chǎng)景,深入分析算法的實(shí)用性,并對(duì)新的問(wèn)題提出進(jìn)一步解決方案將是下一階段的研究?jī)?nèi)容。
參考文獻(xiàn)
[1] HAN Y X,ZHANG X M,LAI Z X,et al. TOFbased FastSelfpositioning Algorithm for UWB Mobile Base Stations[J]. Sensors,2021,21(19):6359.
[2] ALARIFI A,ALSALMAN A,ALSALEH M,et al. UltraWideband Indoor Positioning Technologies:Analysis andRecent Advances[J]. Sensors,2016,16(5):707.
[3] MAZHAR F,KHAN G M,S?LLBERG B. Precise IndoorPositioning Using UWB:A Review of Methods,Algorithmsand Implementations[J]. Wireless Personal Communications,2017,97(3):4467-4491.
[4] 徐建華,張雨霖,韓勇強(qiáng). 基于移動(dòng)節(jié)點(diǎn)輔助定位的UWB 室內(nèi)定位方法[J]. 中國(guó)慣性技術(shù)學(xué)報(bào),2023,31(2):141-147.
[5] JUAN C W,HU J S. Singleobject Localization Using Multiple Ultrasonic Sensors and Constrained Weighted Leastsquares Method [J]. Asian Journal of Control,2021,23(3):1171-1184.
[6] RETSCHER G,KISS D,GABELA J. Fusion of GNSSPseudoranges with UWB Ranges Based on Clustering andWeighted Least Squares[J]. Sensors,2023,23(6):3303.
[7] TONG Z X,XUE J H,KANG Z Q. A Novel Indoor Positioning Algorithm Based on UWB [J ]. InternationalJournal of Sensor Networks,2022,40(4):238-249.
[8] LIU A,LIN S W,WANG J G,et al. A Succinct Method forNonLineofSight Mitigation for Ultrawideband IndoorPositioning System[J]. Sensors,2022,22(21):8247.
[9] 秦明峰,胡麗格. 一種基于偽距殘差加權(quán)的最小二乘定位算法[J]. 計(jì)算機(jī)仿真,2022,39(12):44-48.
[10] 胡仲勛,楊旭靜,金湘中. LSM 算法評(píng)定空間直線度誤差的分析與改進(jìn)[J]. 湖南大學(xué)學(xué)報(bào)(自然科學(xué)版),2010,37(2):27-31.
[11] 劉公緒,李龍,路建民,等. 無(wú)線信號(hào)交匯定位的奇異解問(wèn)題表征與解決[J]. 中國(guó)科學(xué):信息科學(xué),2022,52(11):1992-2010.
[12] 肖嵐,溫麗麗,趙靜,等. 采用改進(jìn)多目標(biāo)灰狼算法的電力系統(tǒng)調(diào)度規(guī)劃[J]. 機(jī)械設(shè)計(jì)與制造,2024(2):373-379.
[13] 馬高權(quán),周娜,謝蒙飛,等. 基于GWO-KELM 模型的變壓器油紙?zhí)坠艿湫徒^緣故障辨識(shí)方法[J]. 電網(wǎng)與清潔能源,2023,39(5):38-48.
[14] GU J,JIAO L C,YANG S Y,et al. Fuzzy Double CmeansClustering Based on Sparse Selfrepresentation[J]. IEEETransactions on Fuzzy Systems,2018,26(2):612-626.
[15] GAO D Q,ZENG X Y,WANG J Y,et al. Application ofLSTM Network to Improve Indoor Positioning Accuracy[J]. Sensors,2020,20(20):5284.
[16] 馮鈴,張楚,劉偉渭. 基于MGWO-SCN 的滾動(dòng)軸承故障診斷方法[J]. 機(jī)電工程,2022,39(10):1382-1389.
[17] 王述紅,魏崴,韓文帥,等. 基于CGWO 算法的邊坡最小安全系數(shù)全局尋優(yōu)方法[J]. 東北大學(xué)學(xué)報(bào)(自然科學(xué)版),2022,43(7):1033-1042.
[18] 張濤,王亞剛,李開言. PCR 儀器的IGWO-BP 神經(jīng)網(wǎng)絡(luò)PID 控制[J]. 控制工程,2023,30(5):822-829.
[19] 楊秀建,皇甫尚昆,顏紹祥. 基于改進(jìn)UKF 的UWB /IMU / 里程計(jì)融合定位方法[J]. 中國(guó)慣性技術(shù)學(xué)報(bào),2023,31(5):462-471.
[20] 孫偉,孫沛?zhèn)悾?非視距環(huán)境下的UWB / INS 室內(nèi)定位方法[J]. 測(cè)繪科學(xué),2023,48(1):1-7.
[21] 徐淑萍,郭宇,王雙,等. NLoS 環(huán)境下基于UWB 的定位算法研究[J]. 計(jì)算機(jī)仿真,2023,40(4):439-443.
作者簡(jiǎn)介
柯 希 男,(1998—),碩士研究生。主要研究方向:UWB 定位、機(jī)器學(xué)習(xí)。
孫 潔 男,(1963—),博士,教授,碩士生導(dǎo)師。主要研究方向:智能控制理論、檢測(cè)技術(shù)與智能傳感器。
基金項(xiàng)目:河北自然科學(xué)基金和重點(diǎn)基礎(chǔ)研究專項(xiàng)(E2019209492)
猜你喜歡
測(cè)控技術(shù)(2018年11期)2018-12-07 05:49:38
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
電測(cè)與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
中國(guó)慣性技術(shù)學(xué)報(bào)(2017年1期)2017-06-09 08:15:14
電測(cè)與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測(cè)與儀表(2015年24期)2015-04-09 12:04:36
