基于GA-LSTM的輪軌力連續測量研究
2024-08-28 00:00:00汪衛陳建政吳越
機械制造與自動化 2024年4期










摘 要:為降低連續測力輪對在橫向力和垂向力解耦過程中產生的系統誤差,基于神經網絡的原理,提出一種基于GA-LSTM的輪軌力連續測量方法。研究表明:相比于GB/T5599—2019中的輪軌力測量方法,本輪軌力連續測量方法具有更高的精度和效率。將本輪軌力連續測量方法運用于國內某運營地鐵線路的輪軌力信號實測,測試數據驗證了其有效性。
關鍵詞:測力輪對; 神經網絡; GA-LSTM; 輪軌力測量
中圖分類號:U270.1 文獻標志碼:A 文章編號:1671-5276(2024)04-0111-08
Continuous Measurement of Wheel Rail Force Based on GA-LSTM
WANG Wei, CHEN Jianzheng, WU Yue
(State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China)
Abstract:In order to reduce the systematic error in the decoupling process of lateral and vertical forces of continuous instrumented wheelsets, a continuous measurement method of wheel-rail forces based on GA-LSTM is proposed according to the principle of neural network. The study shows that compared with the method in the national standard GB/T 5599-2019, the proposed method has higher accuracy and efficiency, and the measured data of wheel-rail forces gained by the method in a domestic operating subway line verify its effectiveness.
Keywords:instrumented wheelset; neural network; GA-LSTM; measurement of wheel rail force
0 引言
隨著城市軌道交通技術的不斷發展,城市軌道車輛的運行速度和運載量均有很大提升,然而隨之而來的安全隱患也不可忽視[1]。因此,對于列車安全性的監測尤為重要,而輪軌力作為列車安全性的主要測試量,如何對其開展精確高效的在線監測值得深入研究[2]。
測力輪對是目前測量輪軌力最直接的方法,常用于軌道車輛的運行考核試驗中。GB/T 5599—2019[3]的連續測力輪對方法(簡稱國標法)通過對測力輪對進行標定,確定測力輪對的靜態標定系數矩陣,最后通過求解線性方程就可以求解出輪軌力。為了獲得理想的靈敏度和線性度,并盡可能地減少交叉干擾以及各種可能的外界干擾,往往需要在測力輪對的加工、輻板刻度的劃分、組橋方案的設計、組橋半徑的選擇、應變片的粘貼、組橋布線等各個環節上都要精益求精,耗費大量的人力與時間。為了解決此問題,近年來國內外諸多學者不斷對測力輪對優化算法進行研究。陳建政[4]在測力輪對的有限元分析和靜態標定試驗的基礎上,分析同一半徑下不同組橋方式對電橋輸出信號的諧波階次與分量大小的影響,提出了一種不必考慮組橋位置應變受垂向力和橫向力耦合干擾的最佳組橋方式及計算方法,這種方法由于高次諧波無法被完全抵消,橋路的輸出只能近似于正余弦波,從而影響測量精度,且對輪對貼片位置的選擇十分嚴格。CAZZULANI等[5]提出了一種在檢測到臨界運行條件(即脫軌系數Y/Q的大值)時提高輪軌力測量精度的方法,這種方法可應用于任何測力輪對,但只對非常規輪對有效,對于常規輪對則會導致較大的測量誤差。TENG等[6]使用LFIM(輕量化輪軌力反演神經網絡模型),利用鐵道車輛的振動信號間接計算輪軌力,但該模型結構比較復雜且缺乏實測數據的驗證。URDA等[7]利用ANN(人工神經網絡)計算輪軸橫向力并使用鐵路車輛模型進行驗證,能對輪軸橫向力進行很好的識別,但該方法忽視了其內部的關聯性,且需要對每個輪對都要建立一個模型。
測力輪對的橫向橋和垂向橋的解耦是一個復雜的非線性問題[8],雖然國標法將之轉化為線性問題,但由此產生的系統誤差難以避免,而神經網絡具有很強的解決非線性問題的能力,能夠滿足解決復雜非線性問題的要求。本文分別基于有限元仿真計算數據和試驗臺測力輪對標定數據,采用結合遺傳算法的長短時記憶神經網絡(GA-LSTM)的方法,建立輪軌力的神經網絡計算模型,將模型結果和國標法計算結果進行對比,并在線路試驗中對計算模型進行驗證。
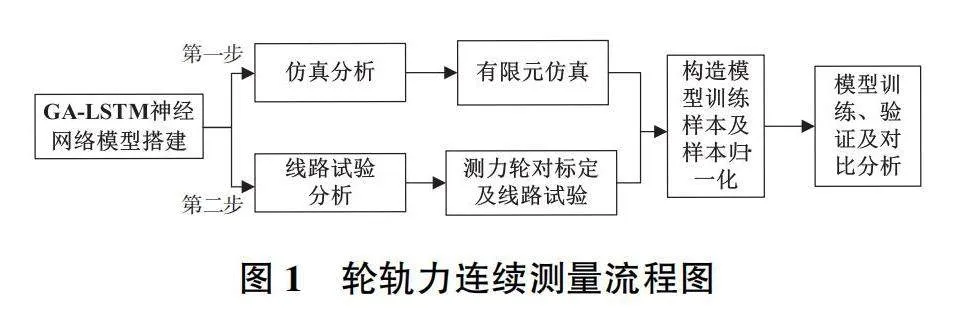
1 研究思路
本文的研究思路如圖1所示。首先,分別搭建基于GA-LSTM方法的輪軌橫向力和垂向力計算模型。然后,通過有限元軟件建立輪對仿真分析模型,使用模擬的輸入激勵和特定半徑幅板電橋的應變輸出等數據構造訓練樣本。對樣本進行歸一化后放入神經網絡中進行訓練,探明輻板橋路應變輸出和輪軌力之間的內在關系,并和采用傳統國標法計算得到的輪軌力進行對比分析,進而初步驗證本文計算方法的有效性。最后,基于測力輪對的實測數據,將基于GA-LSTM方法的輪軌橫向力和垂向力計算方法應用于我國某地鐵車輛實際運行過程中,并驗證其使用效果。
2 GA-LSTM神經網絡模型搭建
2.1 長短時記憶網絡(LSTM)
LSTM的結構與標準RNN類似,都具有一種重復神經網絡模塊的鏈式結構稱之為Cell(細胞)。LSTM的每個Cell都由遺忘門、輸入門、輸出門組成,通過3個門選擇性地讓信息通過,實現信息的保護和控制,從而達到實現長期記憶的目的[9]。
遺忘門的目的是決定上一個時刻的細胞狀態c(t-1)中哪些要遺忘和哪些要保留,經過激活函數的處理得到一個范圍0~1的信息保留比例ft。ft的值越大表示信息保留的越多,如式(1)所示。
ft=σ[Wf×h(t-1)+Uf×x(t)+bf](1)
式中:σ為激活函數Sigmoid函數;Wf、Uf為系數矩陣;bf為偏置矩陣;h(t-1)為隱藏狀態;x(t)為輸入數據。
輸入門控制新信息加入到細胞狀態c(t)的程度:
式中:Wi、Ui、Wc、Uc為系數矩陣;bc、bi為偏置矩陣;i(t)為當前時間步的信息保留比例;C′(t)為候選細胞狀態。
輸出門的目的是根據前兩個門的計算結果求解這一時刻的隱藏狀態h(t),如式(3)—式(4)所示。
式中:c(t)為細胞狀態;o(t)為細胞狀態對隱藏狀態的影響權重;Wo、Uo為系數矩陣;bo為偏置矩陣。
2.2 基于GA-LSTM的輪軌力連續計算方法
超參數的選擇對神經網絡的性能有很大的影響。基于GA-LSTM的輪軌力計算就是使用GA算法對LSTM模型進行全局超參數尋優。通過GA算法搜尋最優的超參數組合,可以有效提高LSTM計算的精確度。首先,對數據進行預處理并根據選擇的超參數生成初始種群,再將數據和初始種群輸入LSTM神經網絡模型進行訓練和計算。然后,根據神經網絡計算結果以及標簽值計算每個個體的適應度值,根據適應度值選擇個體生成新的種群并計算其適應度值,重復這一過程直到適應度值滿足終止條件。最后,將得到的滿足條件的超參數個體再輸入神經網絡就可以得到更為精確的計算結果。
2.3 基于GA-LSTM的輪軌力連續測量模型結構
1)GA遺傳算法結構
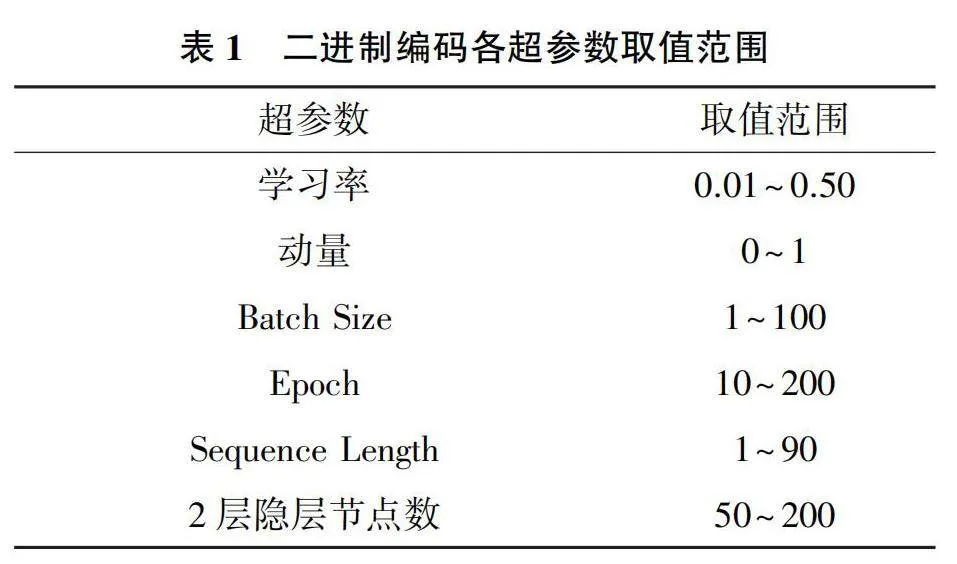
根據模型的結構以及優化器選擇需要用GA算法尋優的超參數如表1所示。
使用實數編碼方式對染色體進行編碼,并隨機產生長度為7的10個染色體,組成初始種群,各超參數的取值范圍如表1所示。算法的交叉概率為0.5,變異概率為0.5,當適應度函數的值小于0.005或迭代次數達到10次時,尋優結束。
2)LSTM神經網絡結構
模型是在Python3.8與Anaconda環境下,借助Pytorch工具包進行搭建的,模型結構如表2所示。GA算法的適應度函數對整個算法的進化方向以及運行效率有重要的影響。本文的適應度函數選擇平均平方誤差MSE,即LSTM網絡的損失函數選擇MSE,如式(6)所示。神經網絡優化器選擇SGDM(含動量的隨機梯度下降)優化器,可以有效避免局部收斂。激活函數選擇ReLU(修正線性單元)函數,用來連接2個LSTM層和全連接層,其具有計算簡單、更高效、速度快的優點,可以在一定程度上解決梯度消失的問題,如式(5)所示。
2.4 模型評價指標
對于回歸計算問題,一般采用平均平方誤差MSE、決定系數R2來評價模型的好壞。
平均平方誤差MSE:
決定系數R2∈(-1,1),越接近1則說明模型精度越高:
3 仿真分析
3.1 有限元仿真
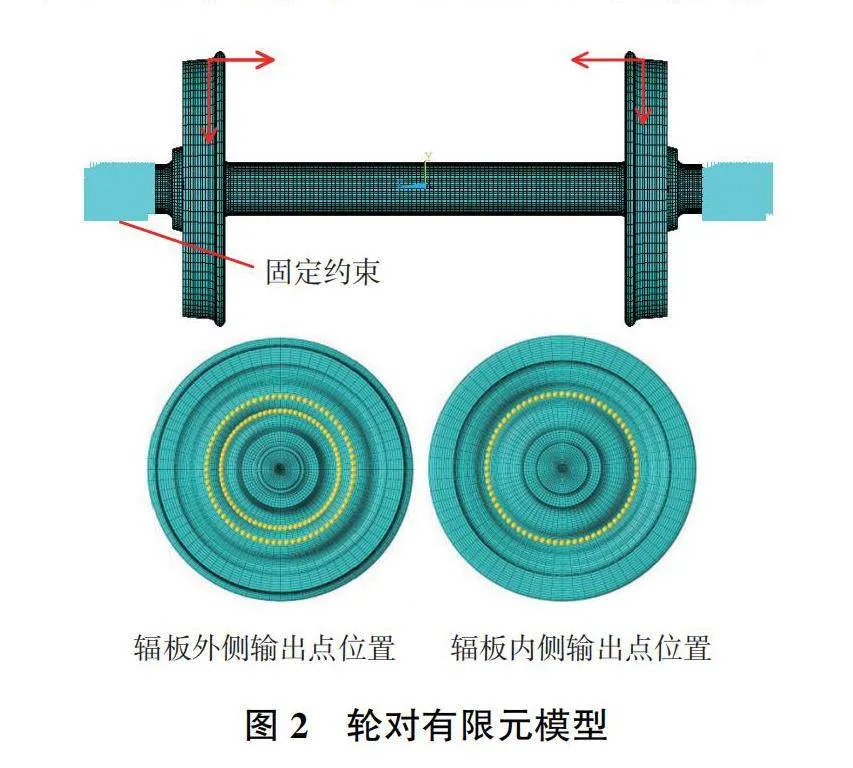
利用有限元軟件建立輪對三維有限元仿真模型。模型參照某地鐵曲輻板輪對的設計圖,使用6面體8節點實體單元Solid185進行網格劃分,總共有節點236 915個,實體單元214 584個,建立的有限元模型如圖2所示。材料參數設置彈性模量E=2.1×1011Pa,泊松比為0.3,密度7.85 g/cm3。計算時在車軸兩端施加固定約束,在踏面上施加橫向力或垂向力。由于實際應變片測量的應變是曲輻板車輪的表面應變,仿真得到的結果需要經過式(8)的變換才能得到輻板表面沿車輪徑向的應變εy′(本文統稱輻板徑向應變)。
式中:εx、εy、εz、γyz、γyz、γxy是直角坐標系下有限元法計算出的輻板表面某個節點的6個應變分量;l、m、n是局部坐標對全局坐標的方向余弦。
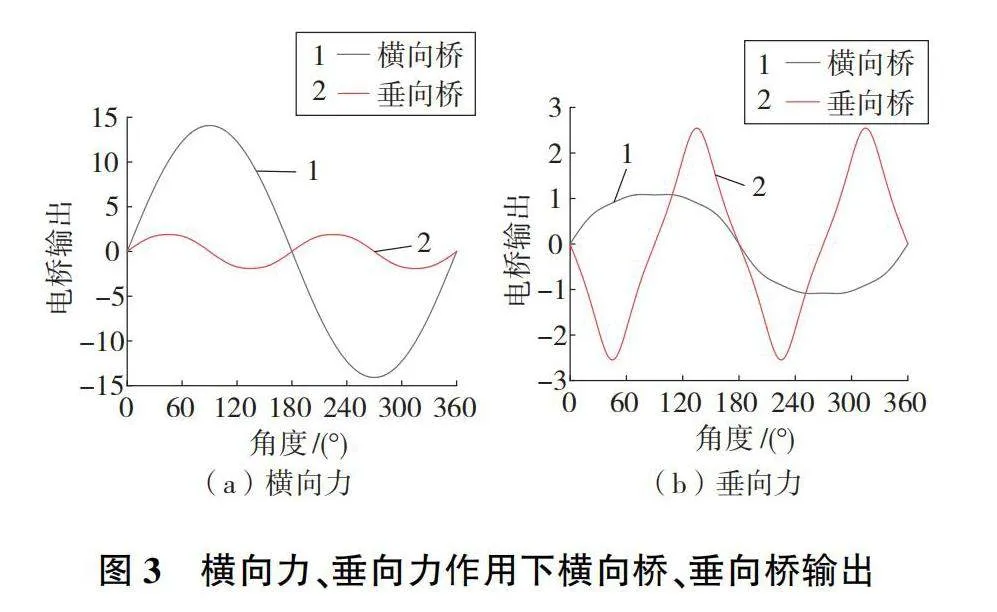
橫向橋和垂向橋的取樣半徑分別為200 mm和250 mm,如圖2所示。根據GB/T 5599—2019的連續測力輪對的組橋方法進行組橋,組橋后單個橫向橋或垂向橋在橫向力、垂向力分別作用下,一圈的輸出如圖3所示。
3.2 訓練樣本集的建立
1)候選輸入特征的樣本集構建
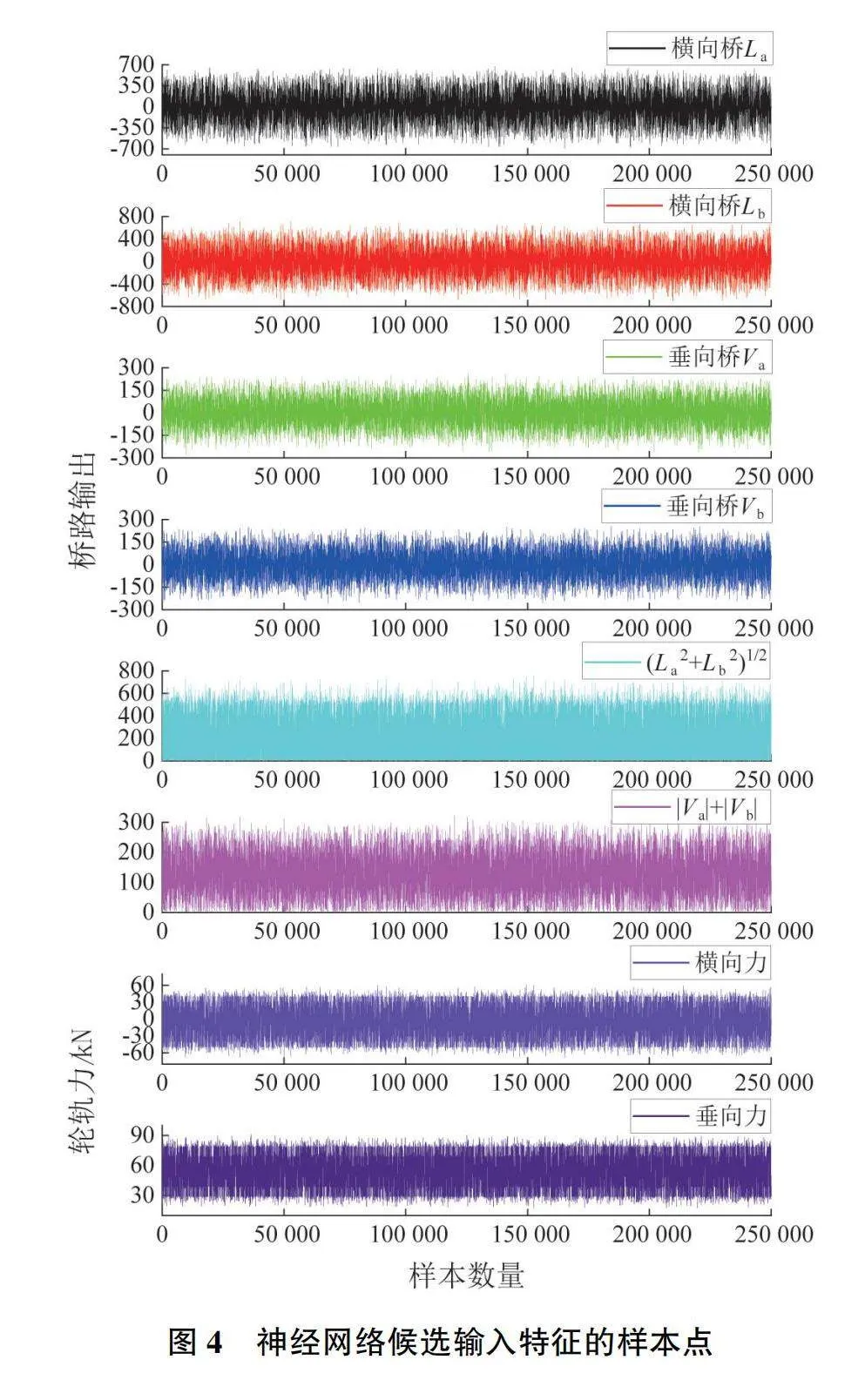
為了選取合適的輸入特征輸入神經網絡進行訓練,構建候選輸入特征樣本集。通過對單位橫向力、垂向力作用下橫向橋、垂向橋的輸出進行組合相加,得到不同大小橫向力、垂向力同時作用下橫向橋、垂向橋的輸出,該候選輸入特征的樣本點如圖4所示,包括相位相差90°的橫向橋La和Lb、相位相差45°的垂向橋Va和Vb、兩個橫向橋輸出的平方和的開根號以及兩個垂向橋輸出的絕對值之和,每個候選輸入特征都擁有25萬個樣本點。
在橫向力、垂向力同時作用在踏面上的工況下,構造訓練樣本集。首先構造橫向力、垂向力的連續時序數列,力的取值范圍分別為-65~65 kN和20~90 kN。樣本點經隨機取值后樣條插值獲得,以保證高頻取樣時兩相鄰點輪軌力的值不會差異過大,這是為了在構造時序數列時保證數據的連續性。同理,考慮輪對橋路的輸出隨車輪轉動成周期性變化和車輪的轉速變化,對輪對橋路360°的輸出進行間隔為0.1°的樣條插值,取樣時每隔n°取對應位置橋路的輸出,再和此時刻對應的橫向力、垂向力相乘,構造出各電橋輸出的連續時序數列。n根據式(9)計算后得到且保留一位小數。
式中:f為采樣頻率,為2 000 Hz;速度v由隨機取值后樣條插值獲得,取值范圍為0~100 km/h;r為車輪半徑,為0.42 m。
2)最佳神經網絡輸入特征的確定與驗證
神經網絡輸入特征從圖4所示的橫向橋La、橫向橋Lb、垂向橋Va、垂向橋Vb、(L2a+L2b)1/2和|Va|+|Vb|中選取,選擇不同的輸入特征組合方式進行驗證訓練,橫向力模型、垂向力模型結果如表3所示。
從表3可以看出,單純將橫向橋、垂向橋的數據輸入橫向力、垂向力模型進行訓練時,模型的尋優代數較多、訓練速度慢。而加上處理后的信號再輸入模型進行訓練,可以有效提高模型的收斂速度,其中(L2a+L2b)1/2、|Va|+|Vb|對提高相應模型的尋優速度、減少尋優代數有較好的效果。當6個輸入特征都輸入模型進行訓練時橫向力、垂向力模型的尋優代數最少,精度較高且滿足要求。因此,確定網絡的輸入特征為橫向力、垂向力同時作用下的兩個相位相差90°橫向橋的輸出、兩個相位相差45°垂向橋的輸出、兩個橫向橋輸出平方和的開根號以及兩個垂向橋輸出的絕對值之和。用這6個特征參數對輪軌橫向力或者垂向力進行計算,實現基于GA-LSTM的輪軌力連續測量。
3.3 模型訓練分析
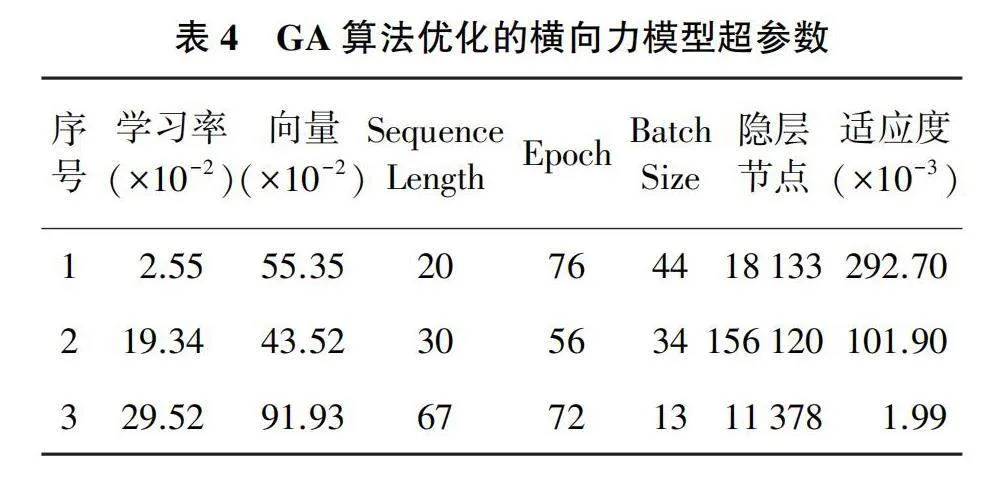
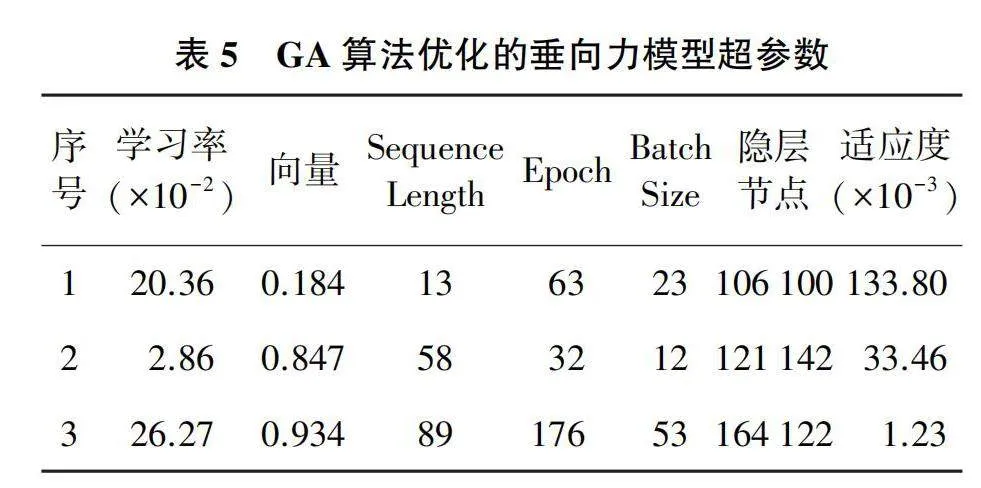
樣本點共25萬個,其中70%的數據作為訓練集參與訓練,30%的數據作為驗證集進行驗證。橫向力和垂向力的計算模型訓練流程相同,數據經過預處理后輸入模型中進行訓練,經過GA算法的尋優,每個個體的超參數數值以及對應的適應度如表4—表5所示。
選擇的適應度函數為MSE,適應度的值越小越好。如表4—表5所示,橫向力計算模型的最優適應度為1.99×10-3,垂向力計算模型的最優適應度為1.23×10-3,能夠得到較高的計算精度和較好的計算結果。
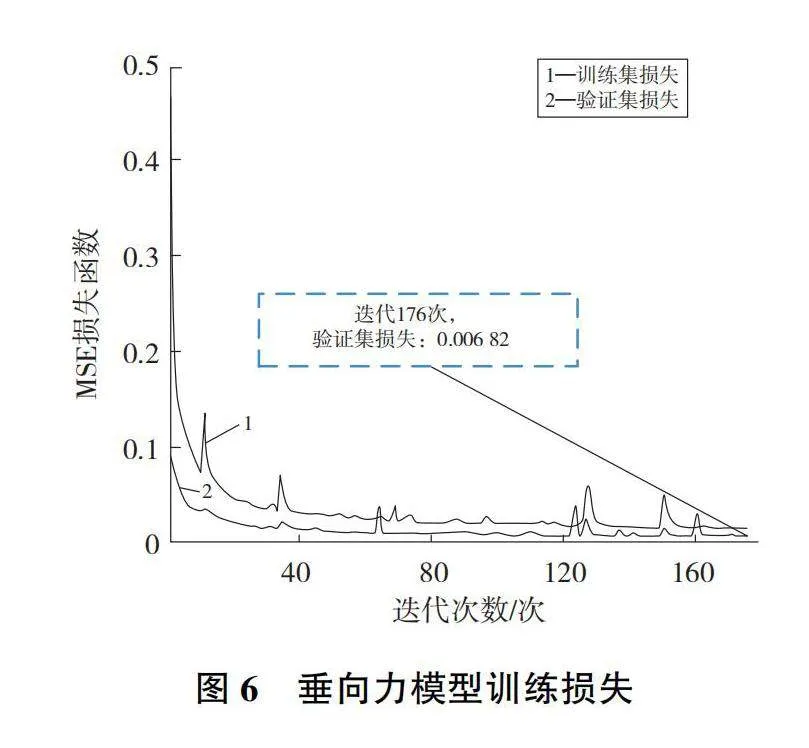
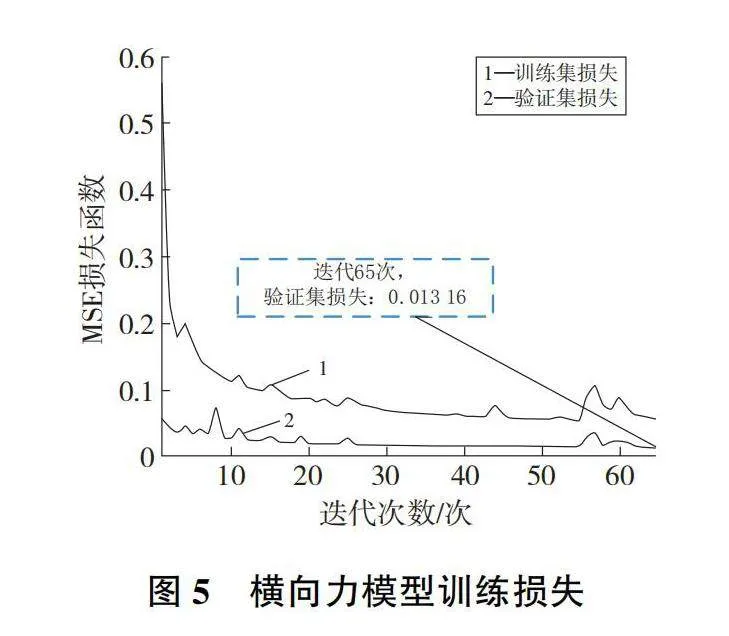
使用GA算法優化得到的超參數進行訓練,橫向力、垂向力計算模型的訓練集以及驗證集的損失值如圖5—圖6所示。對于橫向力計算模型,在迭代65次后,訓練集和驗證集的損失值在一個穩定值附近波動,判斷模型的訓練已經收斂,測試數據集最后一次迭代的損失值為0.01316,決定系數R2為0.9997,說明GA-LSTM網絡模型的擬合精度比較好。對于垂向力計算模型,在經過176次迭代后,損失值基本在一個穩定值附近波動,判斷模型的訓練已經收斂,驗證集最后一次迭代的損失值為0.00682,決定系數R2為0.9994,說明GA-LSTM網絡模型的擬合精度比較好。
3.4 模型驗證及分析
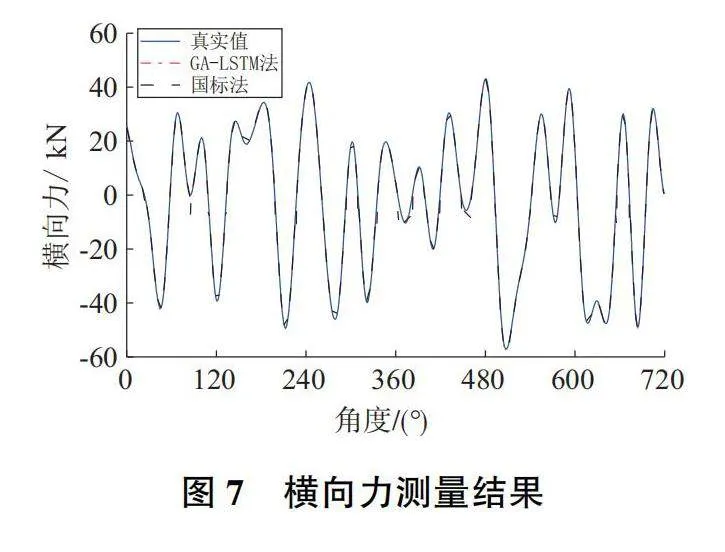
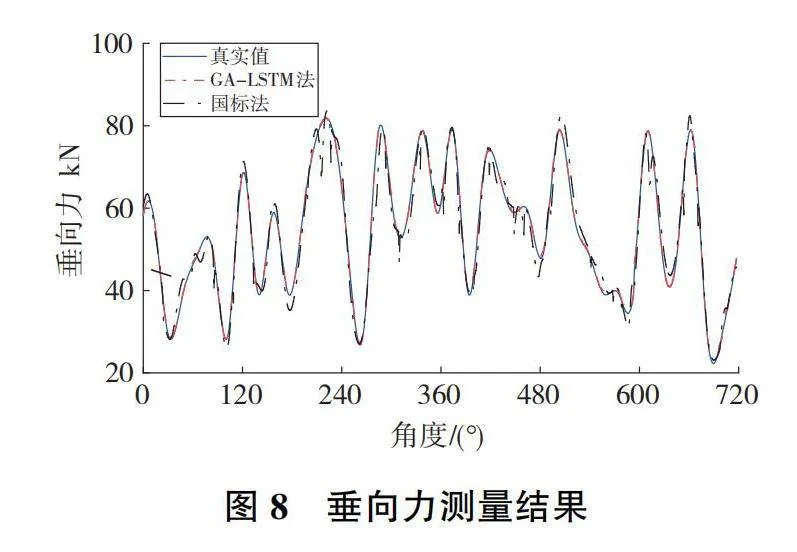
為了對以上模型進行驗證,用同樣的方法構造測試集,輸入訓練好的模型進行計算,并將模型計算結果、國標法計算結果和輪軌力真實值進行對比,真實值即構造訓練集使用的輪軌力數據集。計算結果如圖7—圖8所示(本刊黑白印刷,相關疑問咨詢作者)。
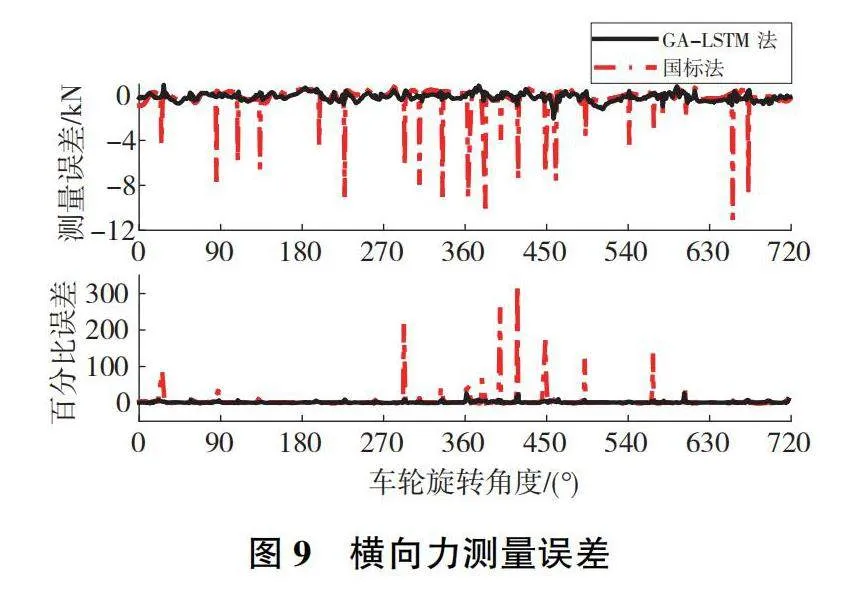
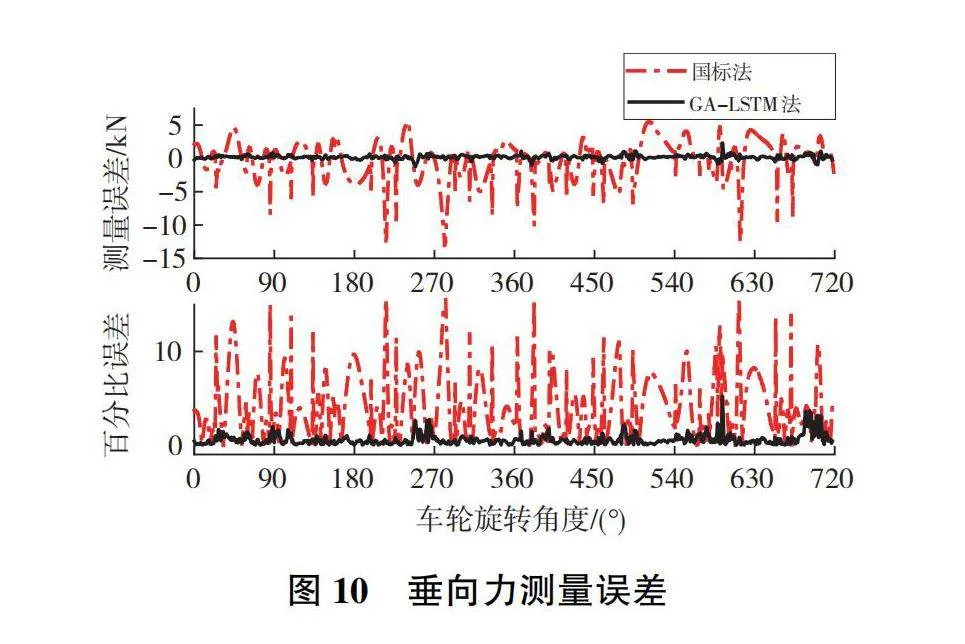
橫向力、垂向力計算模型的相對誤差以及百分比誤差如圖9—圖10所示。對于橫向力測量,國標法的最大測量誤差為10.87 kN,平均測量誤差為0.52 kN,最大百分比誤差為326.13%,平均百分比誤差為4.20%;GA-LSTM法的最大測量誤差為2.07 kN,平均測量誤差為0.28kN,最大百分比誤差為27.03%,平均百分比誤差為1.71%。對于垂向力測量,國標法的最大測量誤差為12.99 kN,平均測量誤差為2.24 kN,最大百分比誤差為17.63%,平均百分比誤差為4.23%;GA-LSTM法的最大測量誤差為2.34 kN,平均測量誤差為0.27 kN,最大百分比誤差為5.24%,平均百分比誤差為0.57%。
從上可以看出,無論是橫向力計算還是垂向力計算,國標法的計算值都偏小,且GA-LSTM法的計算精度都要優于國標法。
4 線路試驗分析
使用真實輪對標定數據構建樣本集,訓練模型,并使用線路實測數據進行驗證計算。
4.1 測力輪對標定
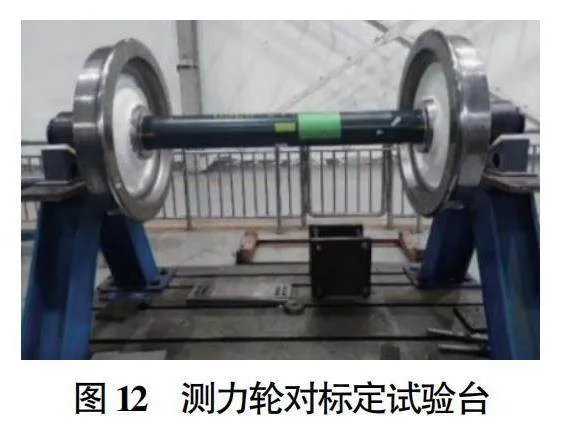
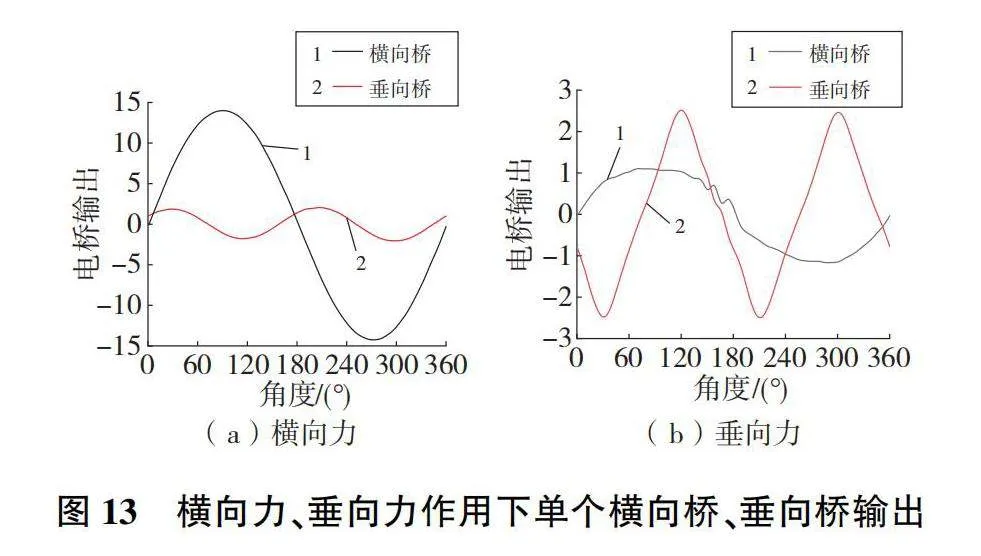
測力輪對貼片(應變片)和組橋在圖11所示的試驗臺上進行,每個車輪輻板上要布置兩個相位相差90°的橫向橋以及兩個相位相差45°的垂向橋。測力輪對橫向力和垂向力的標定均在如圖12所示的輪對標定實驗臺上進行,將待標定的測力輪對輪軸兩側固定在標定實驗臺上。標定后,單個橫向橋、垂向橋的輸出結果如圖13所示。
4.2 測力輪對線路試驗
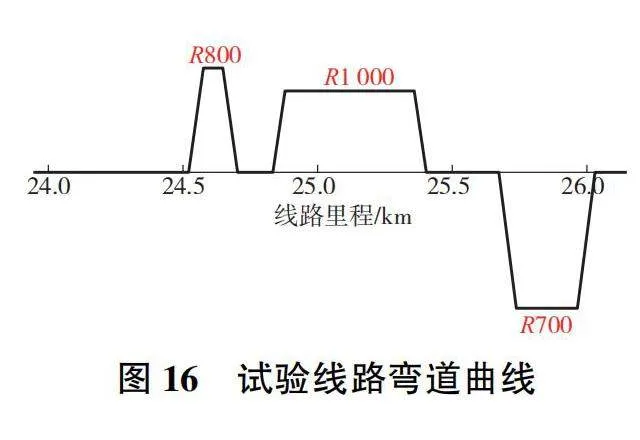
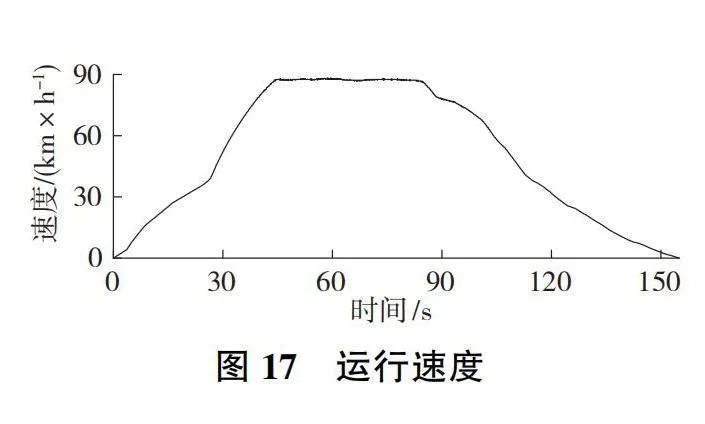
實測數據采集時長為155 s,采樣頻率為2 000 Hz,共31萬個樣本點,各橋路信號如圖14所示。測力輪對安裝在頭車一位轉向架一位軸位置,如圖15所示。試驗線路區間為國內某地鐵線路的一段,線路直線彎道如圖16所示,此測試區間約2 000 m,包含了直線、R700、R800和R1 000半徑曲線。車輛運行速度如圖17所示,最高試驗速度為90 km/h。車輛載荷工況為空載懸掛系統正常工況,輪對靜軸質量為93.42 kN。
4.3 訓練樣本構造
測力輪對標定結果(圖13)相較于仿真數據,實際標定數據存在一定的誤差,但都滿足國標法和GA-LSTM法的計算要求。訓練樣本的構造思路和仿真部分類似,利用標定數據構造訓練集,但橫向力、垂向力使用線路實測數據的國標法計算結果,速度使用線路實測速度,其余參數不變。在輸入神經網絡模型進行計算前,訓練樣本要和仿真分析部分一樣進行歸一化處理。
4.4 模型訓練分析
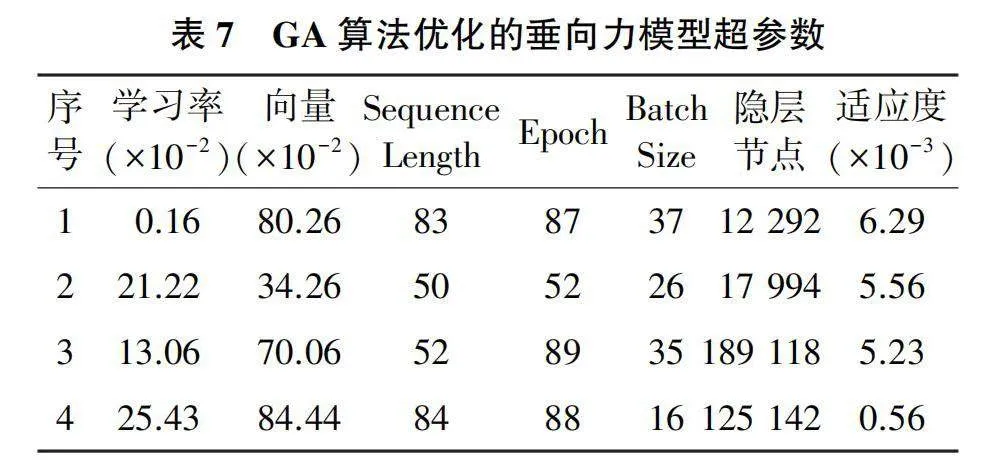
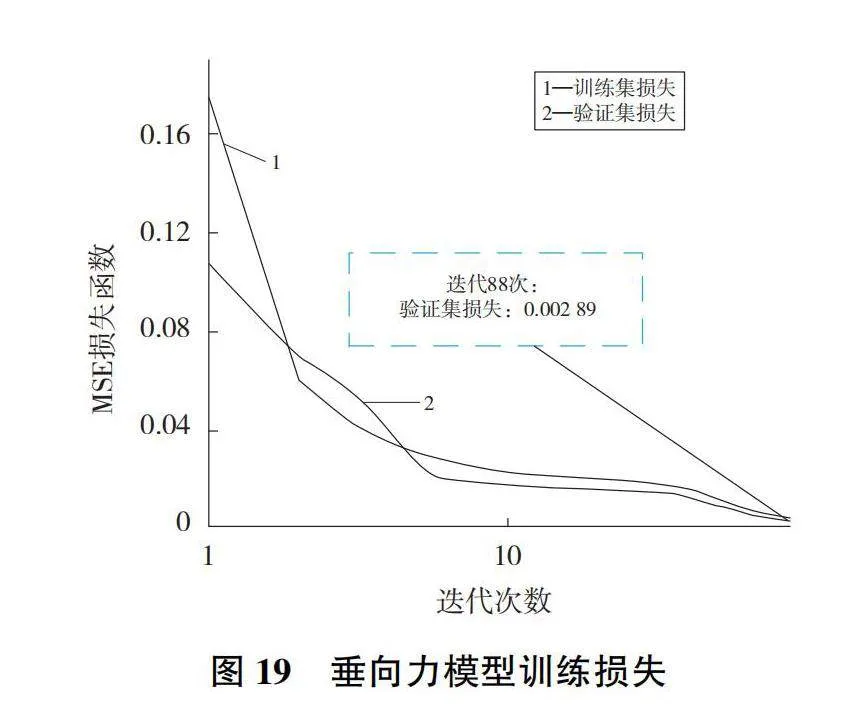
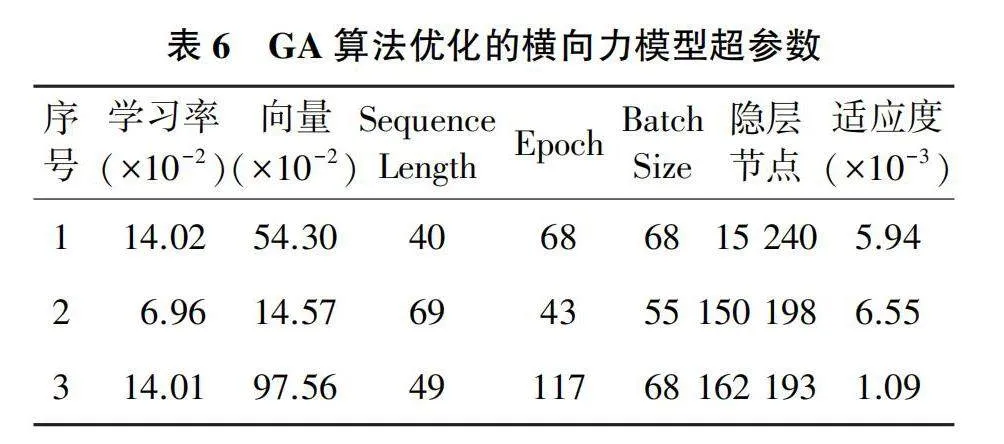
本部分使用的神經網絡模型的輸入特征和結構都和仿真分析部分相同,共31萬個樣本數據,其中70%的數據作為訓練集參與訓練,30%的數據作為驗證集進行驗證,經過預處理之后,用于GA-LSTM模型的訓練,GA算法優化的超參數如表6—表7所示。
如表6—表7所示,橫向力計算模型的最優適應度為1.09×10-3,垂向力計算模型的最優適應度為0.56×10-3,即能夠得到較高的計算精度和較好的計算結果。
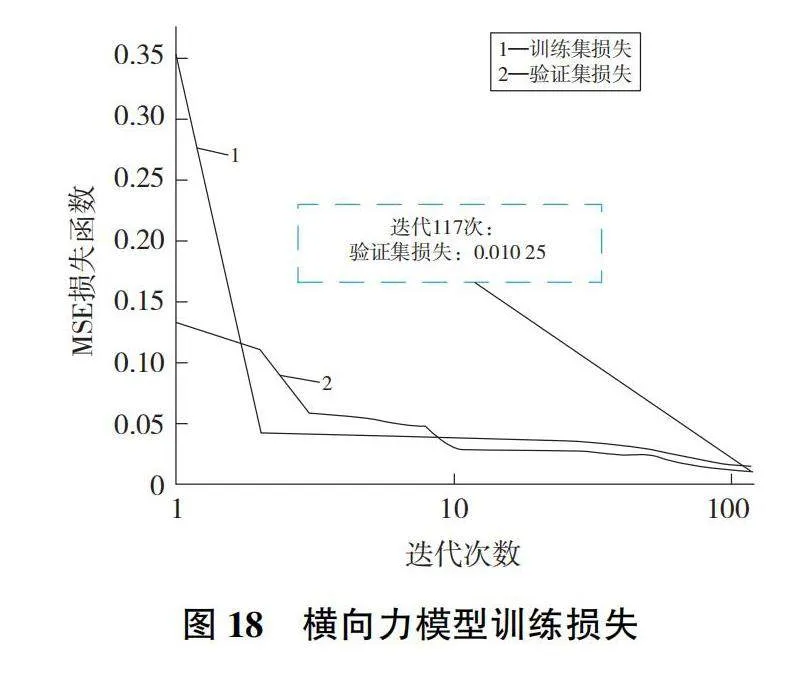
圖18—圖19分別是橫向力模型和垂向力模型的損失值隨神經網絡迭代次數增加的變化曲線,橫向力模型迭代117次后驗證集損失值和決定系數R2分別達到0.010 25和0.997 2,垂向力模型迭代88次后驗證集損失值和決定系數R2分別達到0.002 89和0.999 3,說明神經網絡模型的擬合精度較好。
4.5 模型驗證及分析
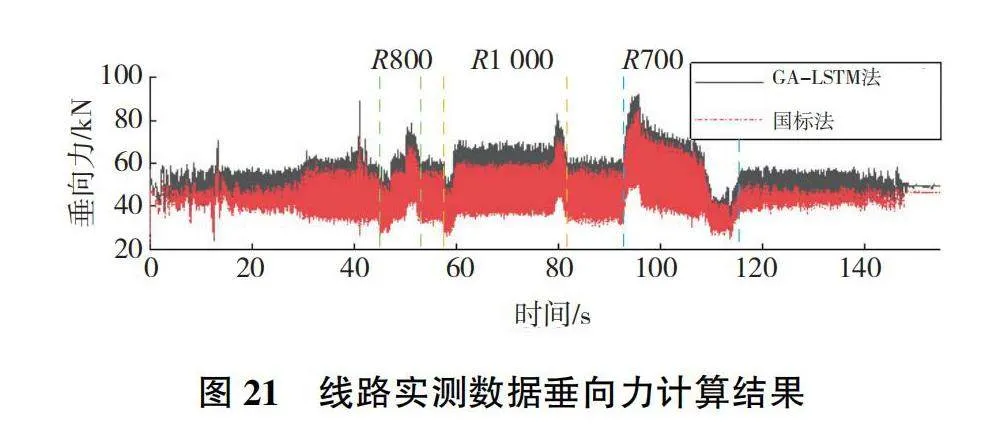
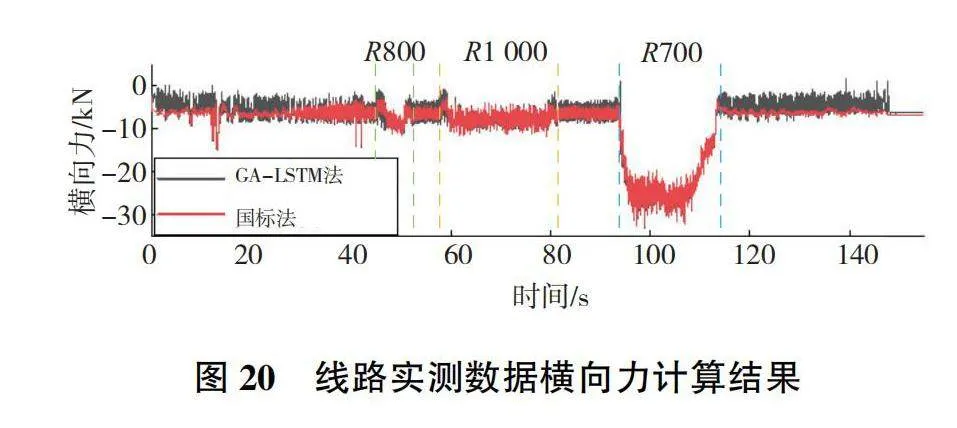
目前,高頻輪軌力的計算方法還不夠完善,國標法在計算輪軌力時會對橋路信號進行一個頻率范圍為0.5 Hz~10Hz的帶通濾波。本文通過對橋路輸出信號的觀察研究,對測力輪對實測信號采用截止頻率為30 Hz的低通濾波。對模型進行驗證分析,將線路實測橋路輸出經預處理后輸入橫向力、垂向力計算模型,得到基于GA-LSTM法的線路實測數據的輪軌力計算值,并和國標法進行對比,如圖20—圖21所示。
從仿真分析可以得知,國標法的計算結果,無論是橫向力還是垂向力,其精度都要低于GA-LSTM法,且國標法的計算結果偏小于實際值。對于線路實測數據的計算結果,在圖20—圖21中,兩種計算方法計算的橫向力和垂向力的趨勢基本相同,也符合國標法計算結果偏小的現象。
5 結語
本文參照國標連續測力輪對法中輻板應變的組橋方法,獲取用于長短時記憶神經網絡的訓練數據,用遺傳算法對相關超參數進行了優化,探究了輪軌力和輻板應變之間的關系,并實現了通過輻板應變數據直接、連續地測量輪軌力。
本文通過仿真分析以及實測數據可以得到以下結論。
1)根據仿真數據,在時域范圍內構建樣本集并進行數據的預處理,最終實現基于GA-LSTM法的輪軌力連續測量。結果表明,無論是橫向力還是垂向力,國標法的計算值都偏小,且誤差相對較大,而GA-LSTM法的計算精度都要優于國標法。
2)使用線路實測數據對基于GA-LSTM的輪軌力連續測量方法進行了驗證并和國標法進行了對比分析。試驗證明,GA-LSTM法能較好地對輪軌力進行計算,可為神經網絡應用于輪軌力測量提供參考。
本文的輻板應變處理方法參考國標連續測力輪對法,也繼承了其只能對低頻輪軌力進行識別的特點。當鐵道車輪在軌道不平順、車輪多邊形和鋼軌波磨等惡劣條件下運行時[10-11],會導致高頻輪軌力的產生,而本文所提的方法無法實現高頻輪軌力的測量,并且由于國標法需要在輻板上選擇合適半徑進行貼片才能保證精度,本文因限于篇幅,沒有結合輻板任意半徑的情況進行對比分析。目前,研究團隊正擴展測力輪對測量的輪軌力頻率范圍的研究,今后也會將該方法擴展到高頻輪軌力的連續測量和輻板任意半徑中去。
參考文獻:
[1] 金學松,郭俊,肖新標,等. 高速列車安全運行研究的關鍵科學問題[J]. 工程力學,2009,26(增刊2):8-22,105.
[2] GULLERS P,ANDERSSON L,LUNDéN R. High-frequency vertical wheel-rail contact forces: field measurements and influence of track irregularities[J]. Wear,2008,265(9/10):1472-1478.
[3] GB/T 5599—2019 機車車輛動力學性能評定及試驗鑒定規范[S].
[4] 陳建政. 輪軌作用力和接觸點位置在線測量理論研究[D]. 成都:西南交通大學,2008.
[5] CAZZULANI G,DI GIALLEONARDO E,BIONDA S,et al. A new approach for the evaluation and the improvement of the metrological characteristics of an instrumented wheelset for the measure of wheel-rail contact forces[J]. Proceedings of the Institution of Mechanical Engineers,Part F:Journal of Rail and Rapid Transit,2017,231(4):381-393.
[6] TENG F, ZHU R, ZHOU Y B, et al.A lightweight model of wheel-rail force inversion for railway vehicles[J]. Concurrency and Computation: Practice and Experience, 2021(1): e6443.
[7] URDA P, ACEITUNO J F, MUNOZ S, et al. Artificial neural networks applied to the measurement of lateral wheel-rail contact force: a comparison with a harmonic cancellation method[J]. Mechanism and Machine Theory, 2020, 153: 103968.
[8] 金學松, 張雪珊, 張劍, 等. 輪軌關系研究中的力學問題[J]. 機械強度, 2005, 27(4): 408-418.
[9] 車暢暢, 王華偉, 倪曉梅, 等. 基于1D-CNN和Bi-LSTM的航空發動機剩余壽命預測[J]. 機械工程學報, 2021, 57(14): 304-312.
[10] 吳越, 韓健, 左齊宇, 等. 鋼軌波磨對高速列車車輪多邊形磨耗產生與發展的影響[J]. 機械工程學報, 2020, 56(17): 198-208.
[11] 吳越, 韓健, 劉佳, 等. 高速列車車輪多邊形磨耗對輪軌力和轉向架振動行為的影響[J]. 機械工程學報, 2018, 54 (4): 37-46.
收稿日期:2023-02-10
