基于擾動觀測器的彈藥提升裝置模糊滑模控制
2024-08-28 00:00:00王震維
機械制造與自動化 2024年4期













摘 要:針對某新型彈藥提升裝置位置控制過程中負載變化和外界擾動等帶來的不確定性問題,提出一種基于擾動觀測器的模糊滑模控制策略。引入擾動觀測器對復合干擾進行在線估計和前饋補償;由于系統參數的不確定性,很難對系統進行精確建模,利用模糊邏輯逼近數學模型,從而建立等效控制律,大大減輕了控制器的設計難度。仿真結果表明:所設計的控制策略在外界干擾存在的情況下,能夠對彈藥提升裝置位置進行精確控制,具有良好的魯棒性。
關鍵詞:彈藥提升裝置;擾動觀測器;模糊滑模控制
中圖分類號:TJ302 文獻標志碼:B 文章編號:1671-5276(2024)04-0197-04
Fuzzy Sliding Mode Control of Ammunition Lifting Device Based on Disturbance Observer
WANG Zhenwei
(School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China)
Abstract:A fuzzy sliding mode control strategy based on a disturbance observer is proposed to address the uncertainty caused by load changes and external disturbances in the position control process of a new ammunition lifting device. A disturbance observer is introduced for online estimation and feedforward compensation of the composite disturbance. As the uncertainty of the system parameters makes it difficult to model the system accurately, fuzzy logic is used to approximate the mathematical model so as to establish an equivalent control law, which greatly reduces the difficulty of controller design. Simulation results show that the designed control strategy is able to control the position of the ammunition lifting device accurately in the presence of external disturbances, and has good robustness.
Keywords:amunition lifting device; disturbance observer; fuzzy sliding mode control
0 引言
新的戰爭條件下,火炮武器的發展方向趨于信息化和自動化。在彈藥自動裝填系統中,彈藥提升裝置負責將彈藥倉中的彈藥取出并輸送到炮尾后端,從而將彈藥軸線調整到與炮膛軸線一致的位置。提高彈藥提升協調動作的速度進而提高彈藥裝填速度是提升火炮發射速度的有效手段之一[1]。
彈藥提升裝置由于其特殊的工作環境,具有參數時變、運動過程有劇烈的沖擊振動、不同工況下慣性參數大范圍變化等特點。由于協調動作的完成精度對后續的彈藥輸送入膛有著很大的影響,提升動作的響應速度對發射速度也有著很大的影響,因此要求其有較高的跟蹤協調精度和良好的魯棒性[2]。
滑模控制對外部擾動和系統參數變化具有良好的魯棒性,因此被廣泛用于機電控制系統中。本文受文獻[3]的啟發,針對彈藥提升裝置參數時變、運動過程存在強烈的沖擊振動、不同工況下慣性參數大范圍變化等特點,提出了一種基于擾動觀測器的模糊滑模控制策略,通過模糊邏輯逼近理想控制律,不需要精確的數學模型參數,極大地降低了控制器設計的難度。通過引入擾動觀測器,將擾動的估計值進行前饋補償,從而削弱外部擾動和系統參數變化對控制性能的影響。所設計的控制器有良好的跟蹤定位精度,且具有良好的魯棒性。
1 彈藥提升裝置數學模型
某新型彈藥提升裝置原理樣機主要由簡化炮尾、托彈盤、提升協調裝置、軌道、剛性鏈和導引鏈盒等組成,簡化后的模型如圖1所示。該新型彈藥提升裝置采用剛性鏈機構作為執行部件進行舉升動作,通過類比于曲柄滑塊機構的運動特性將舉升動作轉化為彈藥的提升和協調動作,由此可見彈藥提升裝置有著復雜的動力學特性,因而可作為一個典型的多體動力學系統進行分析。
為了更簡單地進行數學建模,針對系統進行合理簡化,將系統的各基本物理量,如轉動慣量、黏性阻尼、擾動力矩等,通過計算轉換到系統中同一個部件上,選用剛性鏈機構的鏈輪為等效構件,將各種基本物理量等效到鏈輪的假想轉軸上,建立軌道鏈式彈藥提升裝置的等效動力學方程:
式中:Te為作用到鏈輪上的驅動力矩;θ·和?分別為鏈輪的角速度和角加速度;Je為系統的等效轉動慣量;Be為系統的等效黏性阻尼系數;TD為負載力矩;S為系統的集總擾動。
彈藥提升過程中,Je和Be都是不確定值,將其變化量計入集總擾動中,則系統的集總擾動可寫為
式中:變化值記作ΔJe和ΔBe分別為系統參數變化時,Je和Be的變化量;TL為未知擾動,設未知擾動是有界的。記集總擾動和重力矩的復合項W=TD+S,則彈藥提升裝置動力學方程為
2 控制器設計
2.1 滑模控制器設計
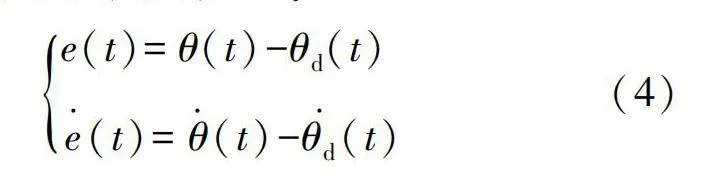
位置跟蹤誤差定義如下:
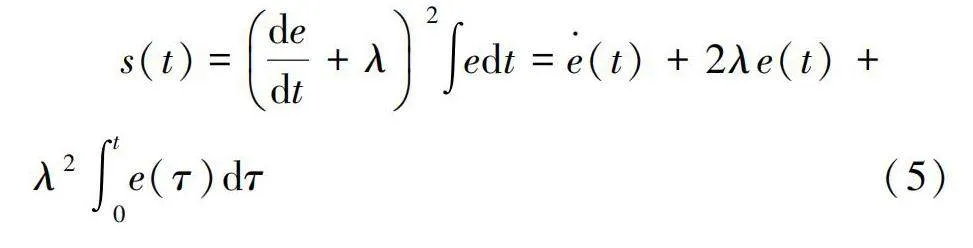
式中θd(t)、θ·d(t)分別為給定鏈輪轉動角度位置和速度指令,取如下的積分型滑模函數:
式中λ為滑模面參數。系統輸入u=Te為輸入到鏈輪的轉矩。
由式(1)、式(4)、式(5)聯立并對時間求導,可得
忽略系統參數變化和外部擾動的影響,即W=0,令式(6)右側為0,可得等效控制律ue為
取基于指數趨近律的切換函數為
式中:k為指數項增益,且kgt;0,ε為等速項增益,且εgt;0;sgn()為符號函數。
當Je和Be不能夠精確給出時,無法建立等效控制律。由此引入模糊萬能逼近理論,利用模糊系統可以對任意的連續函數進行逼近的特性[4],故存在:
ue=uf+Δu(9)
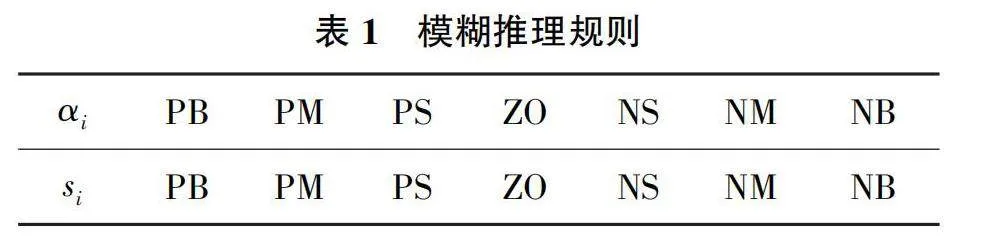
式中:Δu為逼近誤差,通常,逼近誤差有界,故存在常數Δu0gt;0使得|Δu|lt;Δu0;uf為模糊系統的輸出;αi(i=1,2,…,7)為待定的模糊系統參數。取滑模函數s為模糊輸入變量,si(i=1,2,…,7)為待定的模糊系統參數。
定義輸入、輸出變量模糊語言值:
αi={PB,PM,PS,ZO,NS,NM,NB}
si={PB,PM,PS,ZO,NS,NM,NB}
模糊推理規則如表1所示。
模糊系統輸出uf可以表示為
式中0≤wi≤1(i=1,2,…,7)為第i條模糊規則中模糊輸入s(t)的隸屬度。
2.2 擾動觀測器設計
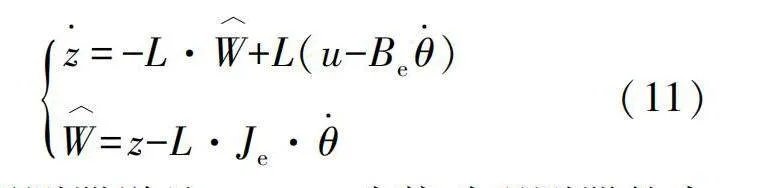
設計擾動觀測器如下[5]:
式中:L為觀測器增益,Lgt;0;z為擾動觀測器的內部狀態量;?為擾動觀測器輸出,即uDOB=?。估計誤差定義為
對式(12)進行時間求導,可得
通過Laplace變換,可得
式中p為拉普拉斯算子。
由式(14)可知,擾動觀測器的估計誤差W~和復合擾動的導數?的值有關。在實際工作中,復合擾動W會不斷地變化,通過擾動觀測器的估計,將估計值作為前饋補償,從而可以削弱擾動變化的影響來改善系統的控制性能,并且無需集總擾動的精確估計使得對被控對象的要求降低。
本文設計的控制器由等效控制律ue、增益切換控制律uSW、擾動觀測器uDOB3個部分組成,即
u=ue+uSW+uDOB(15)
2.3 穩定性證明
考慮如下的Lyapunov函數:
對式(16)求導并把控制律式(5)和式(7)代入,可得:
式中kgt;0,所以當ε≥Δu+|W~|時,V·≤0,此時系統是穩定的。
3 仿真分析
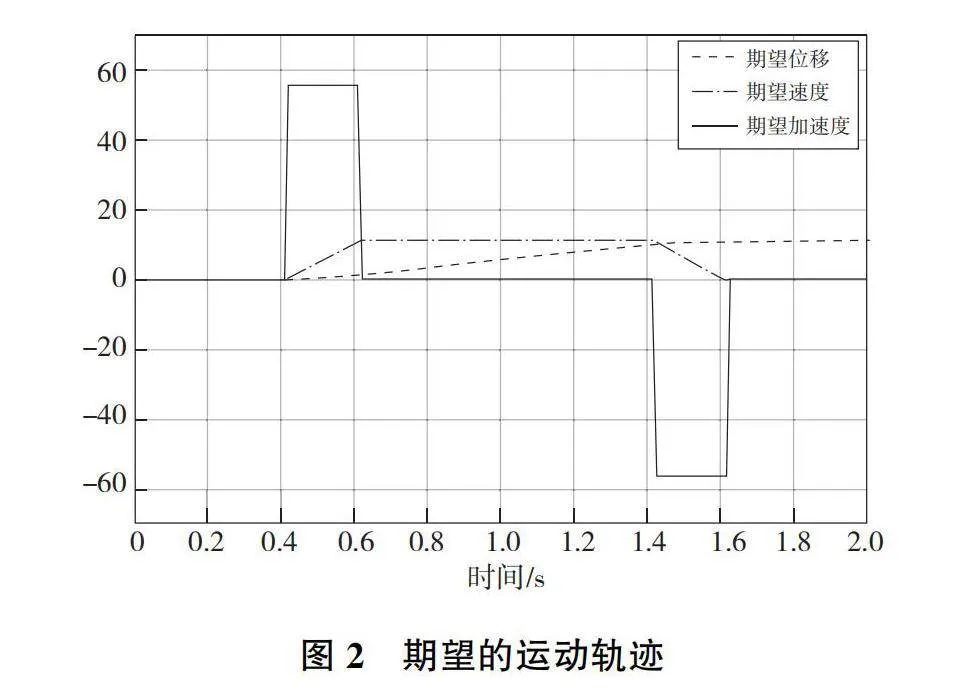
對彈藥提升裝置鏈輪的期望軌跡為點到點(point-to-point,PTP)的位置控制,期望軌跡如圖2所示。
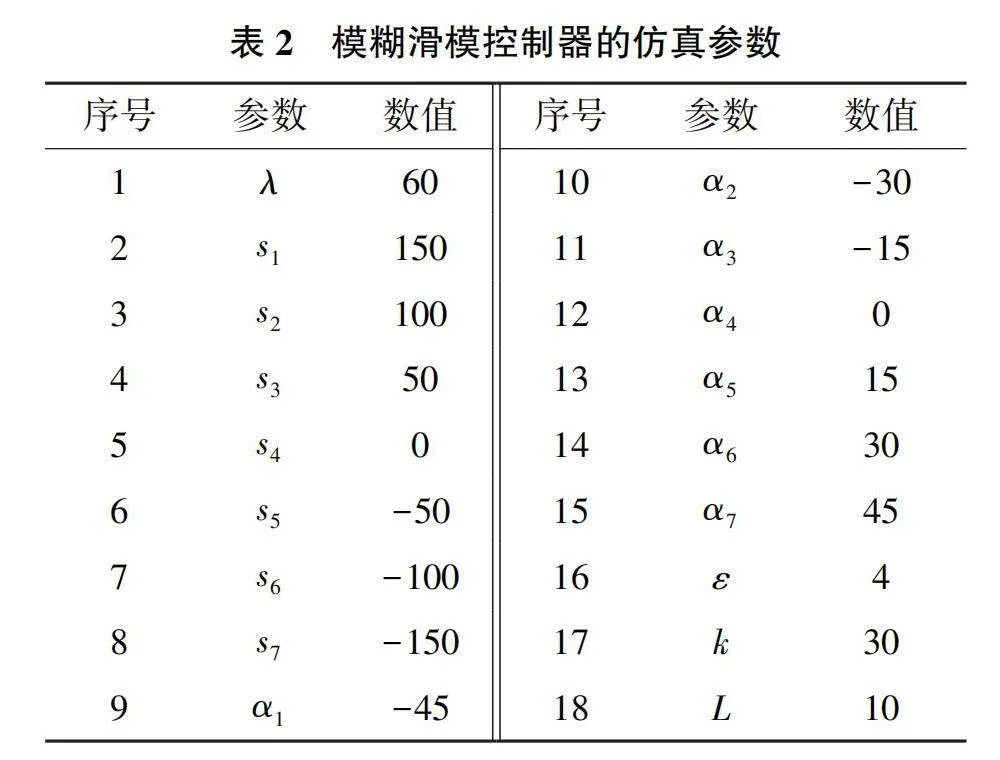
控制器的參數設置如表2所示。
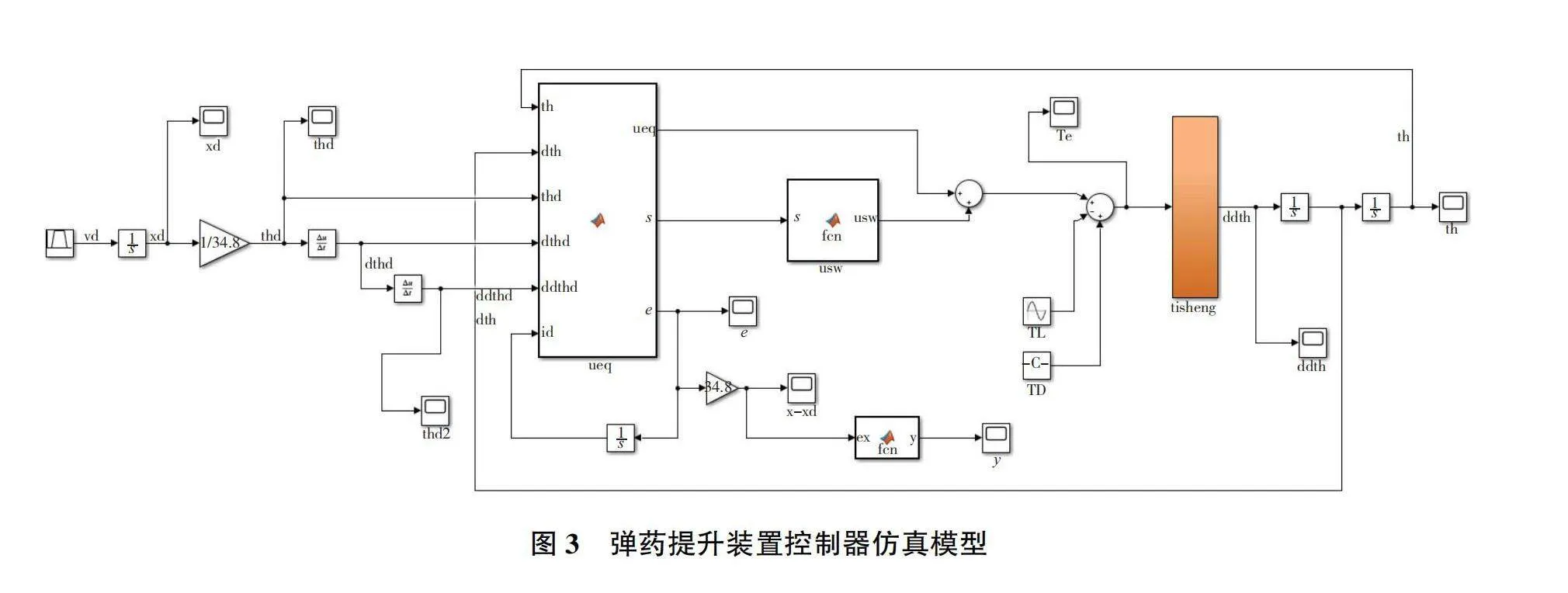
根據上文設計的滑模控制律,在MATLAB/Simulink中搭建軌道鏈式彈藥提升裝置的滑模控制仿真平臺,如圖3所示。
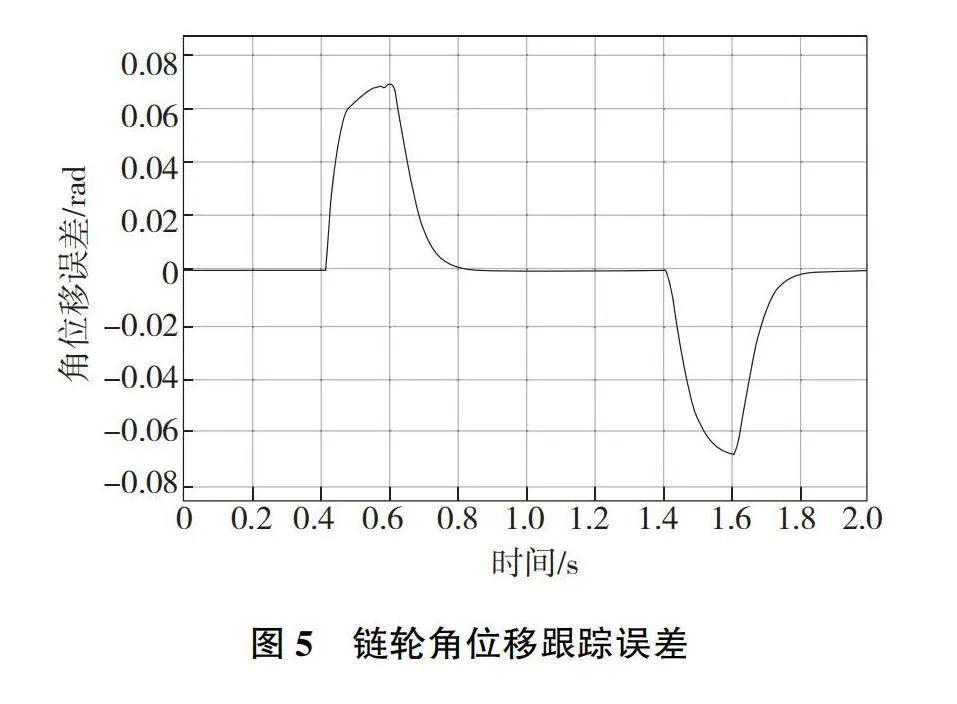
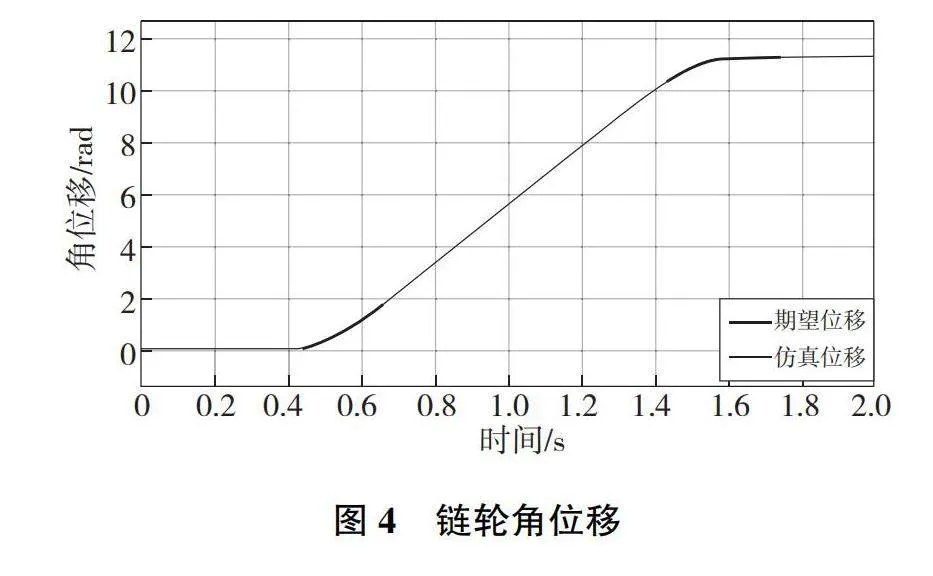
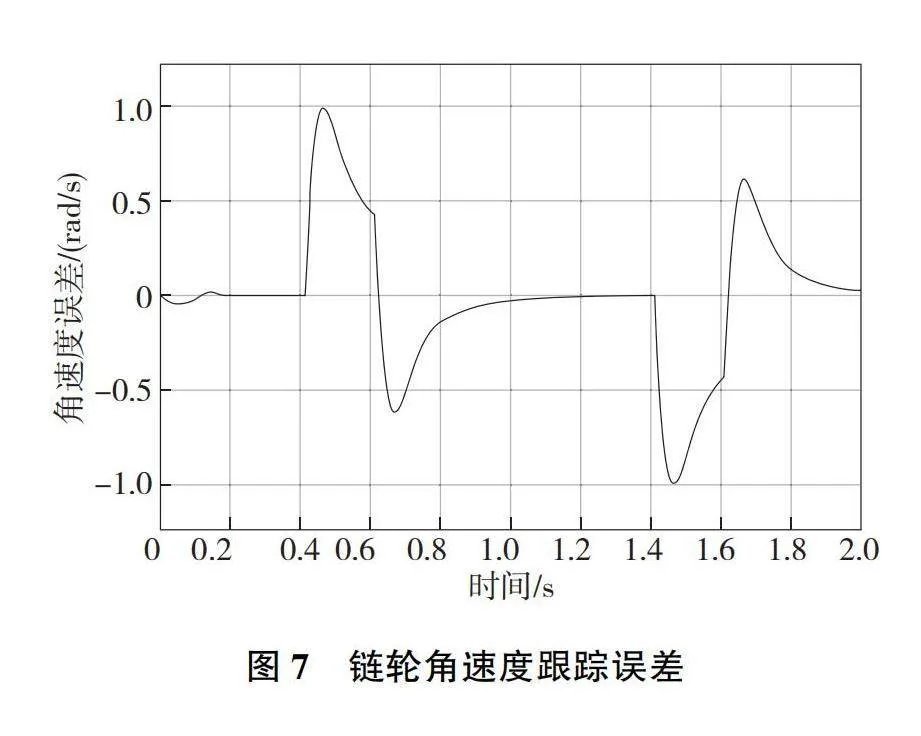
仿真實驗結果如圖4—圖8所示。
由實驗結果可以看出,鏈輪角位移的最大跟蹤誤差為0.064rad,根據鏈輪轉角和彈藥的運動關系可得彈藥軸線與炮膛軸線的誤差為0.709°,滿足精度要求。帶有擾動觀測器的模糊滑模控制的跟蹤效果較好,對參數和外部擾動的變化反應不明顯,具有良好的魯棒性。
4 結語
本文針對某新型彈藥提升裝置的提升協調動作位置控制問題,提出了一種基于擾動觀測器的模糊滑模控制策略。通過Adams-MATLAB聯合仿真平臺進行實驗驗證,結果表明該控制策略對軌道鏈式彈藥提升裝置的參數變化和外部擾動不敏感,具有較高的跟蹤定位精度和良好的魯棒性。
參考文獻:
[1] 侯保林,樵軍謀,劉琮敏. 火炮自動裝填[M]. 北京:兵器工業出版社,2010.
[2] 鄒權. 某大口徑火炮彈藥自動裝填控制系統關鍵問題研究[D]. 南京:南京理工大學,2015.
[3] SUN J W,ZHAO K. Adaptive neural network sliding mode control for active suspension systems with electrohydraulic actuator dynamics[J]. International Journal of Advanced Robotic Systems,2020,17(4):172988142094198.
[4] 李超,謝振宇,吳傳響,等. 基于模糊控制的磁軸承PID控制算法研究[J]. 機械制造與自動化,2022,51(2):38-41.
[5] LI A,LIU M,SHI Y. Adaptive sliding mode attitude tracking control for flexible spacecraft systems based on the Takagi-Sugeno fuzzy modelling method[J]. Acta Astronautica,2020,175:570-581.
收稿日期:2023-02-15
