傾轉旋翼無人機過渡段控制策略研究
2024-08-28 00:00:00余帆黃一敏趙君寶
機械制造與自動化 2024年4期
關鍵詞:設計







摘 要:針對傾轉旋翼無人機過渡段的縱向控制問題,以某型傾轉旋翼無人機為研究對象,綜述了國內傾轉旋翼機的發展趨勢。利用Rotorlib軟件建立傾轉旋翼無人機的6自由度剛體模型;通過頻域和時域對過渡段的特性進行分析,設計出過渡段的舵面操縱分配策略;對總距控制通道的控制結構進行設計。由于傾轉旋翼在過渡過程中總距控制通道存在嚴重的耦合,根據動力學方程分析提出余弦分配的策略來改進耦合問題。通過仿真驗證了余弦分配對于總距控制通道的耦合問題有明顯的改善。
關鍵詞:傾轉旋翼無人機;6自由度剛體模型;過渡控制策略;余弦分配
中圖分類號:V279 文獻標志碼:B 文章編號:1671-5276(2024)04-0230-05
Research on Transition Control of Tilt Rotor UAV
YU Fan, HUANG Yimin, ZHAO Junbao
(College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China)
Abstract:Aiming at the longitudinal control problem of the transition section of tilt rotor UAV, taking a tilt rotor UAV as the research object, summarizs the development trend of tilt rotor UAV in China. The six degree of freedom rigid body model of the tilt rotor UAV is established by Rotorlib software. The control surface control allocation strategy for the transition section is designed by analyzing the characteristics of the transition section in the frequency domain and time domain. Due to the severe coupling of tilt rotor in the total distance control channel during the transition, a cosine allocation strategy is proposed to solve the coupling problem. Simulation results verify that the proposed strategy significantly improves the total distance control channe and coupling.
Keywords:tilt rotor UAV; six degree of freedom rigid body model; transition control strategy; cosine allocation
0 引言
無人傾轉旋翼機是一種由動力驅動、依靠遙控飛行或者自主控制飛行的可垂直/短距起降的無人駕駛航空飛行器,能夠根據飛行任務的需求攜帶多種任務設備,具備超視距飛行能力和通信能力,并且能夠重復使用[1-2]。無人傾轉旋翼機的機翼兩端各安裝一套可跟隨短艙轉動的旋翼推進裝置,短艙可以在很大范圍內完成傾轉,并且固定在所需的方向,因此能夠產生向上的升力或者前向推力[3-4]。
國內外對傾轉旋翼機的軌跡設計也展開了大量的研究。郭劍東[5]為了使控制系統具有良好的魯棒穩定性,使用H∞回路魯棒控制來設計小型傾轉旋翼機過渡階段控制律,利用自適應技術實現各模式間的切換,并通過仿真證明其可行性。韓麗敏[6]提出了基于H∞理論的控制律設計方法來解決傾轉旋翼機過渡階段魯棒性差的特點,并利用仿真驗證其有效性。然而理論與實踐不同,目前大部分先進的控制理論因復雜度高而無法實現工程化應用,甚至不能保證其穩定性,從而對飛行安全產生威脅。
本文以工程型號機的研發為基礎,對其進行6自由度仿真模型的建立,從無人傾轉旋翼機的動力學變化規律出發對其控制策略進行了研究,并且對其魯棒性進行分析并提出改進策略,以此提高飛行品質以及系統的魯棒性。
1 問題描述
1.1 研究對象描述
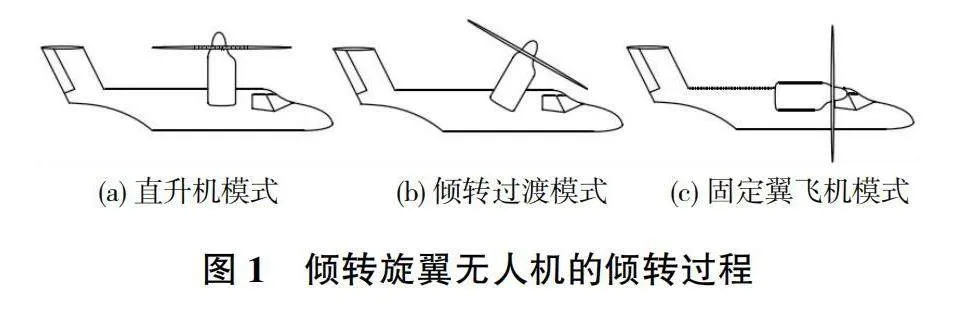
本文的研究對象來源于實驗室與國內某研究所合作的傾轉旋翼無人機項目。對象傾轉旋翼無人機通過短艙機構自動向前傾斜完成傾轉過渡過程,如圖1所示。同傳統直升機不同,直升機需要通過尾槳來抵消旋翼產生的反轉矩,傾轉旋翼機左右雙旋翼產生的反轉矩能夠互相自行抵消[7]。該傾轉旋翼無人機擁有兩套操縱舵面,即旋翼操縱舵面和氣動操縱舵面。旋翼舵面操縱量有總距、縱向周期變距,氣動舵面操縱量包括升降舵、襟翼、方向舵[8]。圖1所示為該飛行器在直升機模式時左右雙旋翼通過總距來改變旋翼拉力。總距為旋翼的操縱舵面,改變總距相當于改變槳葉的迎角,原理是通過舵機帶動拉桿以此來改變槳葉迎角使得總距發生變化,最終導致旋翼的拉力發生改變。
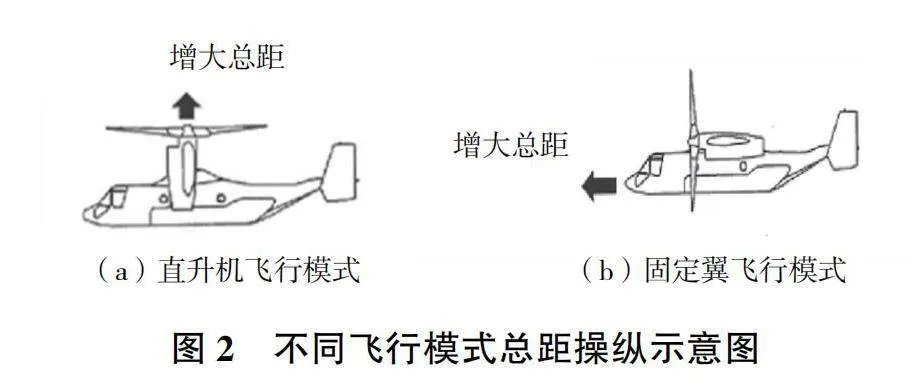
當傾轉旋翼無人機進行傾轉過渡時,隨著旋翼的前傾,旋翼拉力的方向在縱向上的分量逐漸增大[9]。此時改變總距會同時影響縱向和垂向上的分力大小,如圖2所示,存在嚴重的操作耦合,這會大大影響控制品質。
1.2 建模與特性分析
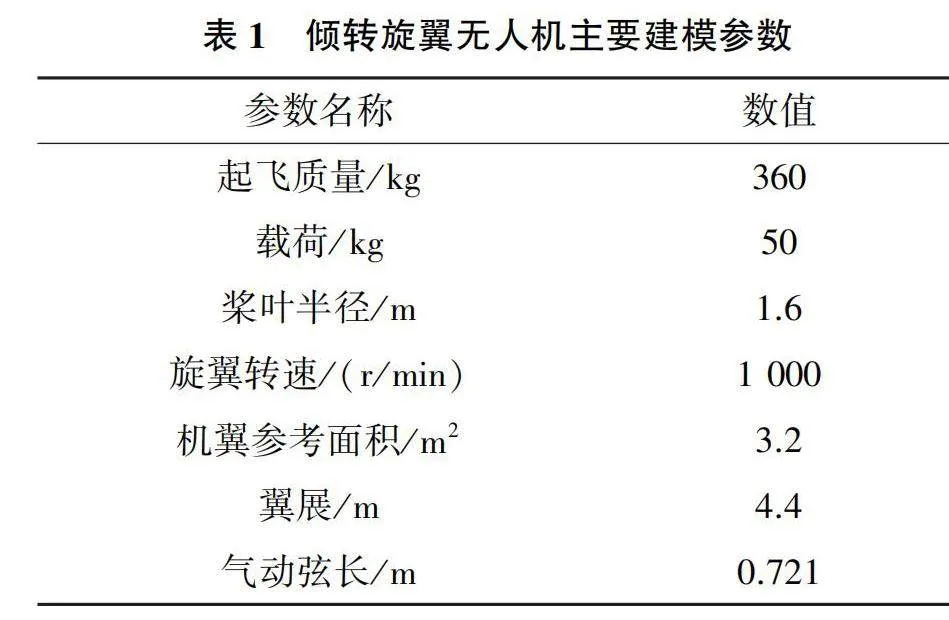
對象傾轉旋翼無人機采用混合機體法建模,通過Rotorlib建模軟件對傾轉旋翼無人機的雙旋翼進行建模,實時計算出旋翼產生的力和力矩,且該軟件的旋翼建模已經由實際飛行驗證了其軟件建模的高置信度。機體氣動模型采用課題組成熟的增量法進行建模,根據基態的氣動數據與氣動舵面舵偏產生的氣動數據增量來計算出氣動力和力矩,通過接口函數加入到Rotorlib的6自由度剛體模型中,該傾轉旋翼無人機的主要建模參數如表1所示。
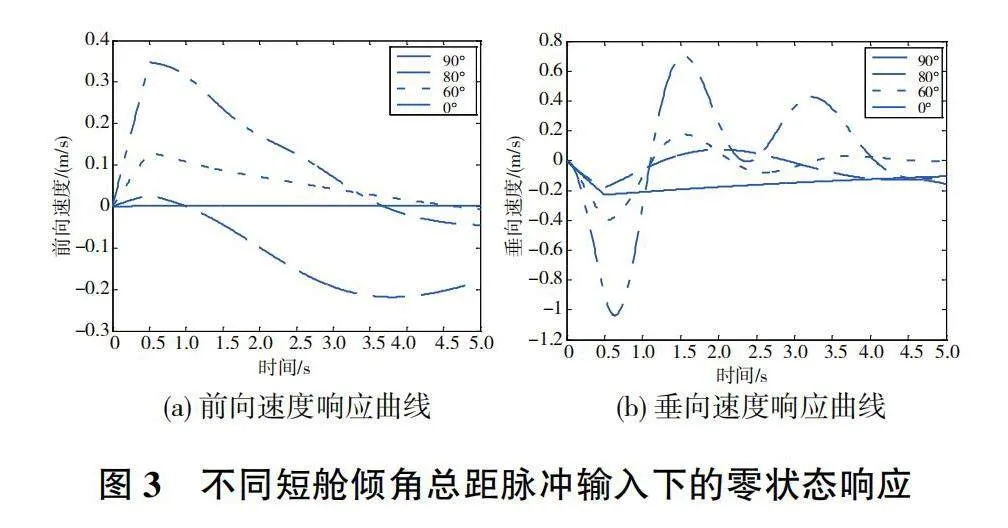
構建完傾轉旋翼無人機的6自由度剛體模型之后通過時域和頻域對其特性進行分析。通過在配平狀態下的線性模型中注入單個操縱舵面擾動從而展開時域下的操縱響應分析。各舵面的擾動信號為持續0.5s的脈沖信號。通過觀察縱向狀態量的時域響應曲線,分析不同短艙傾角下的各縱向操縱舵面操縱效率的變化規律,總距輸入1°脈沖,升降舵和縱向周期變距的輸入保持為0不變(圖3)。
由圖3可見,隨著短艙傾角的減小,旋翼拉力在縱向的分量逐漸增大。雖然垂向分力對總距的偏導隨著短艙傾角的減小而減小,但由圖3可見飛行模式下總距仍然對垂向速度有劇烈的影響。
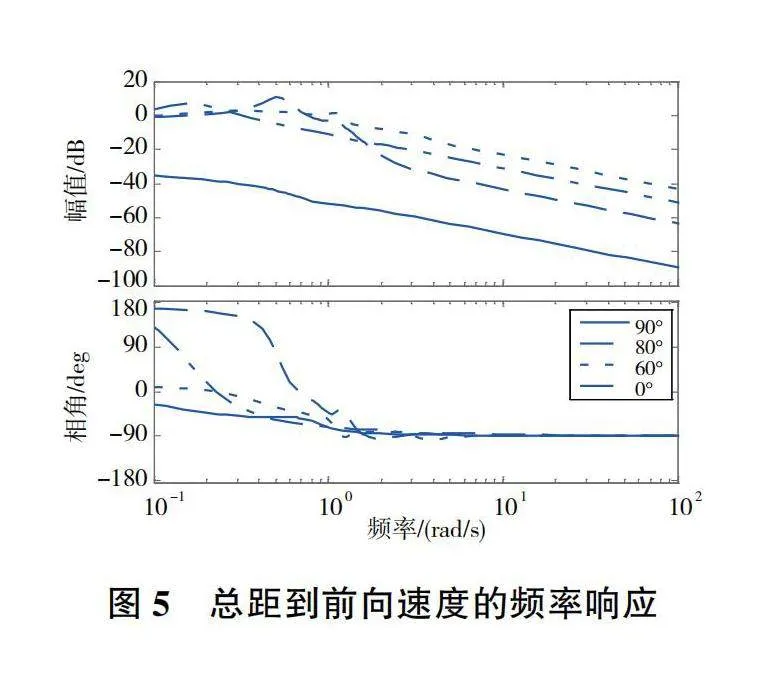
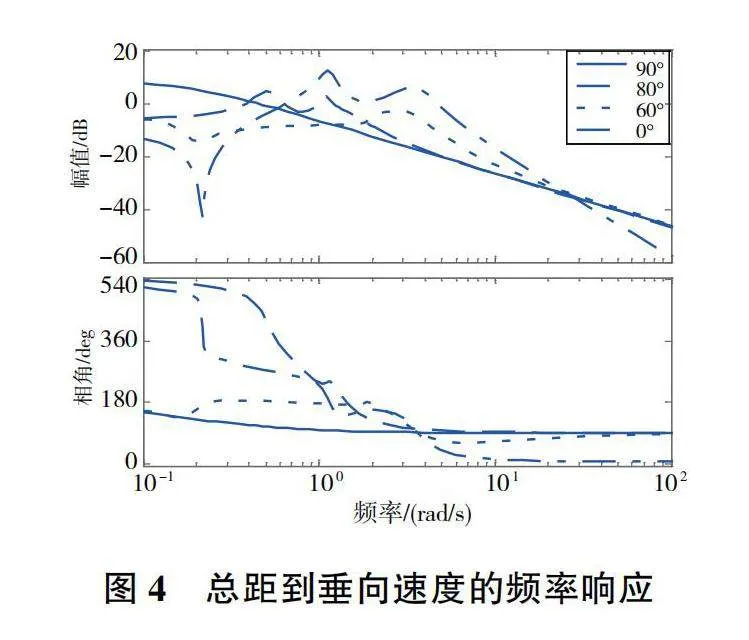
通過從不同短艙傾角下的線性化模型中提取總距操縱舵面到縱向狀態量的傳遞函數,從而對各縱向操縱舵面操縱效率的變化規律展開頻域分析,如圖4和圖5所示。
頻域響應曲線中低頻段的增益和截止頻率的大小可以表征該通道的快速性,即舵面輸入對狀態量的操縱效率。可以結合低頻段增益和截止頻率由上述頻域曲線中得到與時域分析中一樣的結論:隨著旋翼短艙的前傾,總距對垂向速度的操縱效率逐漸減弱,對前向速度的操縱效率逐漸增強,縱向周期變距的操縱效率逐漸減弱的同時升降舵操縱效率逐漸增強。
2 總距控制通道控制律設計
2.1 垂向控制結構設計
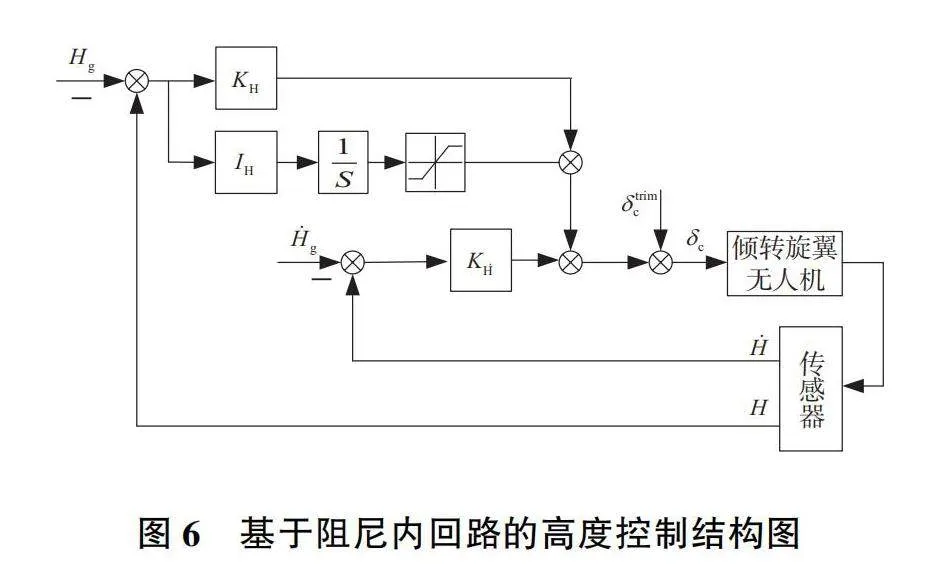
對象傾轉旋翼無人機總距控制通道采用阻尼內回路對高度進行控制,基于阻尼內回路的高度控制律主控量為高度信號,為提高系統阻尼引入升降速率。為了提高控制的環境適應性,采用了兩個手段,首先是總距的配平值作為前饋部分,其值與機體質量、轉速、海拔高度等有關,從此方面可提高環境適應性。其次是為了提高在擾動情況下高度控制的適應能力而引入積分環節,單純的高度PD控制結構僅能在配平量完全準確的情況下才能實現高度的零偏差控制。
基于阻尼內回路的高度控制律為
控制結構如圖6所示。
1)升降速度阻尼回路設計
參數設計由內而外,首先設計升降速率的反饋系數。根據模型求出總距到升降速度響應的傳遞函數為
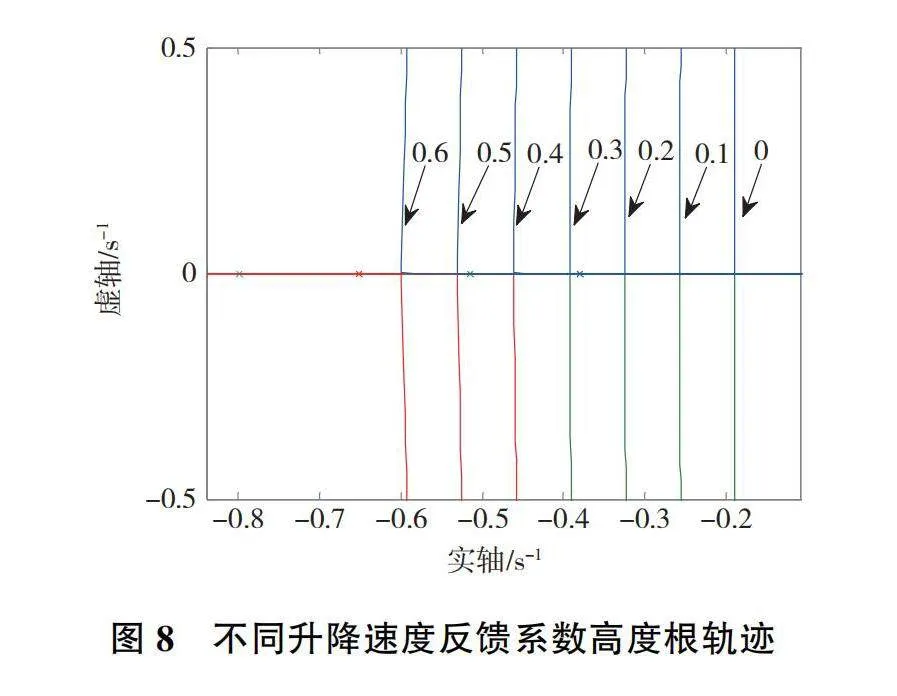
繪制總距到升降速率的開環根軌跡,如圖7所示。
由開環傳遞函數結合圖7所示根軌跡可以看出,總距到升降速率響應速度緩慢,需加快系統響應速度。再結合一組不同升降速率反饋增益下如圖8所示的總距到高度開環根軌跡圖,可以看出升降速率的系數變化不改變高度開環根軌跡形狀,僅改變了響應速度的大小。同時考慮工程使用,系數選取KH·=0.4。此時垂向的時間常數減小為1.1s,響應速度得到明顯的改善。
2)高度控制回路設計
高度通道是隨遇平衡的,即本身出現一個干擾項,如突然有陣向上垂向風,高度會隨之爬高固定到新位置而不會歸置原位置。此特性下可以僅使用PD控制結構便可以使之達到阻尼控制,滿足控制的平穩性,但是為了使高度通道在不同環境下有消除控制誤差的能力,積分環節必不可少。同時考慮在自主起降階段,高度控制的控制精度要求較高,所以最終采取PID結構。
接入升降速率后提取出總距到高度通道的開環傳遞函數:
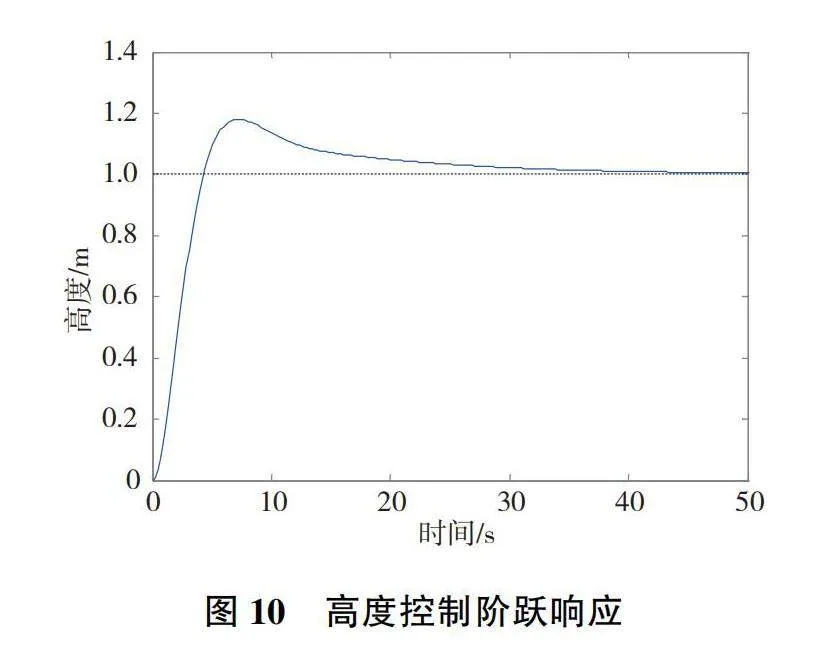
利用MATLAB的sisotool設計高度通道的比例積分環節,如圖9所示。
觀察圖9,阻尼比為0.737,幅值裕度為穩定,相角裕度Pmgt;56°,同時觀察高度控制階躍響應曲線圖(圖10),上升時間為7s,調節時間在31s,超調量δ<20%。此結果可以滿足設計要求。最終設計參數為KH=0.45,IH=0.03。
2.2 縱向控制結構設計
通過1.2節的分析,可以發現在過渡過程中,隨著旋翼的前傾,總距的改變會導致縱向和垂向上的力同時發生改變。所以過渡過程中總距也可以對縱向的速度進行控制。這里對速度的控制采用簡單的比例積分控制,具體控制表達式如下:
參數設置通過非線性仿真選取設計的最終參數為KVc=0.3,IVc=0.03。
3 總距控制通道改進
3.1 改進策略控制結構
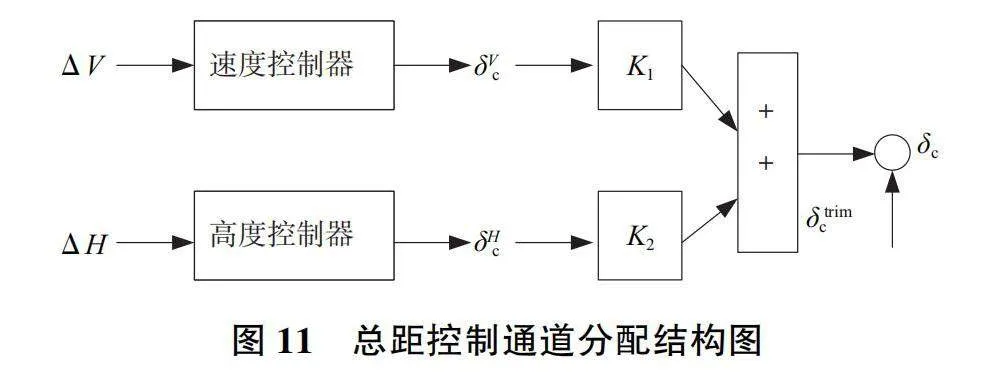
針對過渡過程總距控制通道高度和速度耦合的問題,其本質在于縱向周期變距在大干擾下試圖調節飛行器的前飛速度時,改變了旋翼升力的方向,從而影響其垂向分力并最終影響到高度控制效果。本節提出余弦分配的改進設計方法。
改進控制策略的設計思路是對總距控制通道的速度控制分量與高度控制分量按照一定權重系數進行分配,權重系數隨短艙角的大小而變化,如圖11所示。
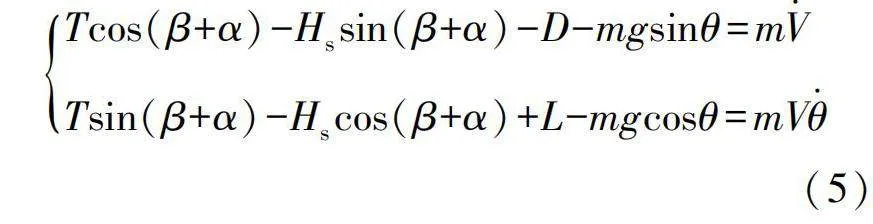
過渡過程運動分析可得平飛過渡過程某一短艙角β下的縱向運動方程如式(5)所示。
無人機在平飛過程中軌跡為0°,因此無人機的俯仰角等于機身迎角,可進一步化簡得式(6)。
式中:T和Hs分別表示左右雙旋翼產生的拉力和后向力;L和D分別表示無人機產生的氣動升力和阻力;V·表示無人機合力產生的加速度。
忽略旋翼后向力中的翼型阻力及其他小項,可以得到式(7)。
Hs=Ta1s(7)
式中a1s表示旋翼揮舞引起的后倒角。由于過渡飛行過程中飛行迎角相對較小,為凸顯主要矛盾,忽略動力學方程中的?,將式(7)代入式(6)可得:
忽略旋翼揮舞的影響,可以得到下式:
可以看出旋翼拉力在縱、垂向的分量與短艙角有著天然的三角函數關系,而飛機模式操縱段的縱、垂向耦合程度也是與旋翼軸的傾轉有關。故可以采用余弦分配即三角函數來對速度控制分量和高度控制分量進行分配,所以改進控制結構如下所示。
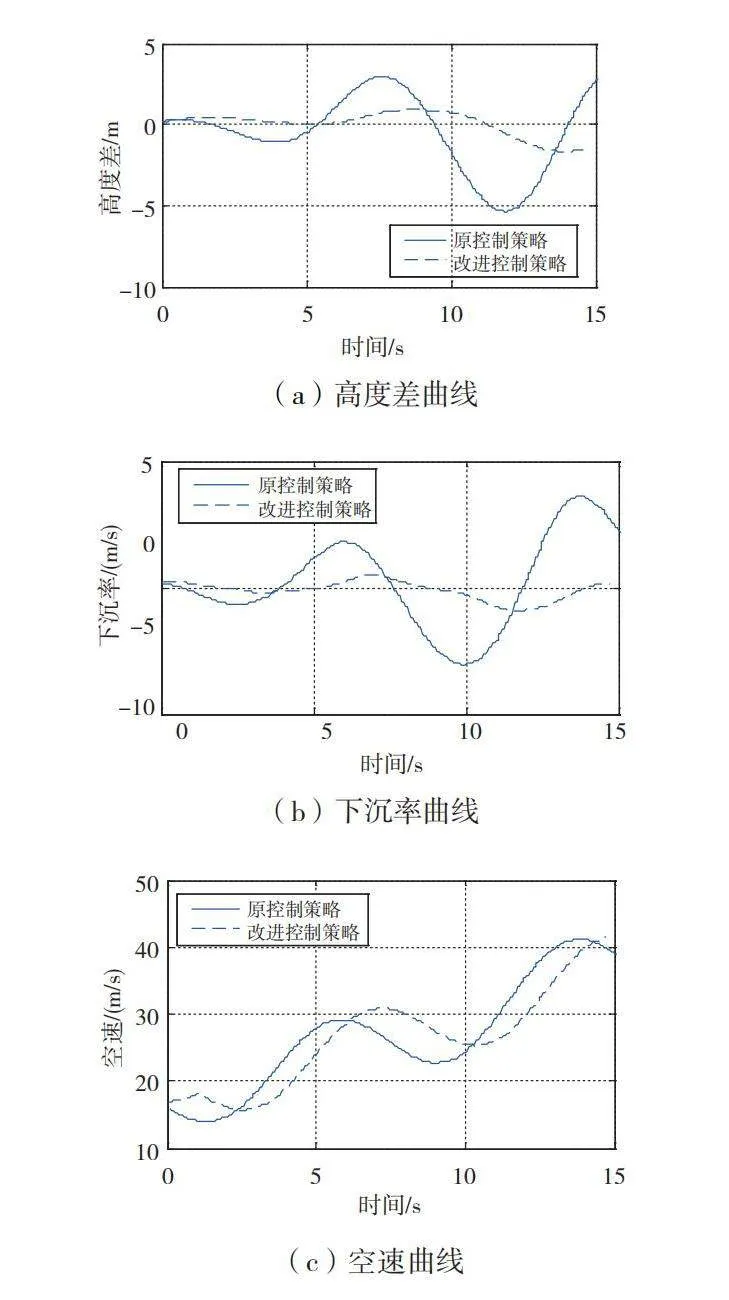
3.2 改進策略性能對比
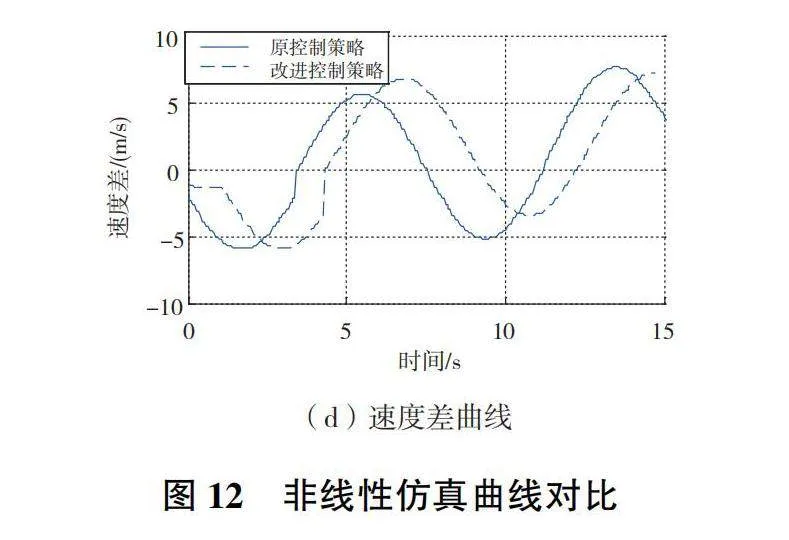
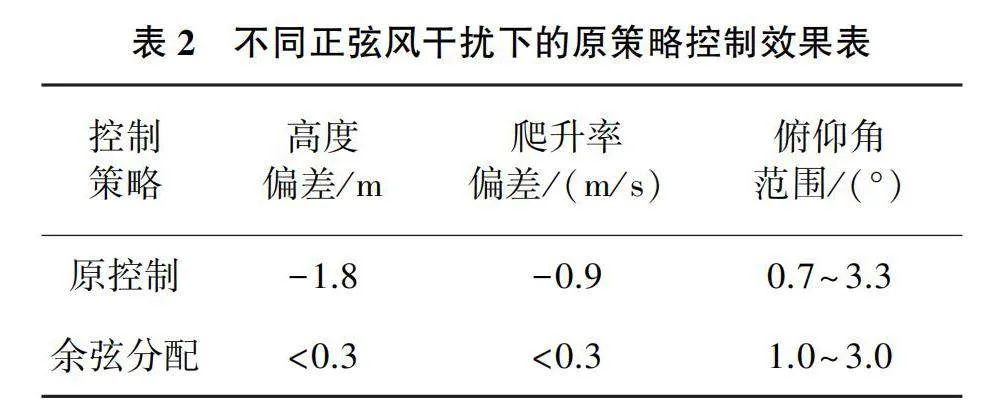
為了驗證余弦分配改進策略的控制效果,本小節選取最惡劣的5m/s的順風環境和5m/s的正弦風環境進行非線性仿真和理論分析,仿真數據如表2所示,仿真曲線如圖12所示。
根據正弦風控制效果表和動態響應曲線可知,在余弦分配改進策略的作用下,相比較原始策略控制性能有著顯著的提升,這也表明了余弦分配策略的合理性和可行性。
4 結語
本文聚焦于傾轉旋翼無人機過渡段的操縱分配以及縱向控制問題,具體研究成果包括:
1)建立了傾轉旋翼無人機的6自由度剛體模型,通過頻域和時域對其過渡特性進行了分析,設計了過渡段的舵面分配操縱策略;
2)設計了總距控制通道的控制結構,并且提出了余弦分配的改進控制策略,提升了傾轉旋翼無人機的飛行品質。
參考文獻:
[1] STACKLEY S J. Unmanned systems integrated roadmap FY2011-2036 [Z]. Washington DC:Officer Of the Secretary Of Defense, 2011.
[2] PAW Y C. Synthesis and validation of flight control for UAV [D]. Minneapolis :The University of Minnesota, 2009.
[3] BOLKCOM C. V-22 osprey tilt-rotor aircraft [R]. [S.I.:s.n.],2004.
[4] AMARILLO T.V-22 osprey pocket guide[R]. [S.I.]:Bell Boeing V-22 Program Office, 2007.
[5] 郭劍東. 無人傾轉旋翼機飛行控制研究[D]. 南京:南京航空航天大學,2013.
[6] 韓麗敏. 傾轉旋翼機過渡段縱向控制技術研究[D]. 南京:南京航空航天大學,2011.
[7] 曹蕓蕓. 傾轉旋翼飛行器飛行動力學數學建模方法研究[D]. 南京:南京航空航天大學,2012.
[8] 賴水清,嚴峰,徐珂. 傾轉旋翼機過渡飛行階段控制律設計研究[J]. 直升機技術,2009(3):52-55.
[9] 肖斯奇. 傾轉旋翼無人機過渡段縱向控制策略研究[D]. 南京:南京航空航天大學,2021.
收稿日期:2022-11-23
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
