一種面向工業應用的機器人回位方法
2024-08-28 00:00:00侯龍瀟
機械制造與自動化 2024年4期



摘 要:針對工業機器人作業過程中非正常停機引起位姿處于未知狀態而導致機器人無法從停機位置自動返回初始位置的問題,提出一種工業機器人的回位方法。設計機器人回位路徑,結合k-近鄰算法、構造回位空間以及空間分類閾值對機器人的位姿信息進行分類化處理;重構機器人特征數據進行決策樹模型的訓練;使用訓練完成的模型決策回位路徑后執行機器人回位程序,實現工業機器人自動返回初始位。回位試驗實驗結果表明:在隨機位姿和攜帶多樣工具的狀態下機器人回位成功率為93.3%。
關鍵詞:工業機器人;回位方法;空間構造;路徑設計;決策樹算法;k-近鄰算法
中圖分類號:TP242; TP391 文獻標志碼:B 文章編號:1671-5276(2024)04-0235-06
A Robot Homing Method for Industrial Applications
HOU Longxiao
(Henan Machinery Design amp; Research Institute Co., Ltd., Zhengzhou 450003,China)
Abstract:For the abnormal halt of industrial robots in the working process resulting in their postures in an unknown state and the failure of automatic return to the initial position from the halt position, a homing method for industrial robot is proposed, which includes designing a robot return path, classifying the robot's pose information by combining the k-nearest neighbour algorithm and constructing return space and spatial classification threshold, reconstructing the robot feature data for decision tree model training andexcuting the robot regression program after using the trained model decision return path.Thus theautomatic return of industrial robots to the initial position being realized. The experimental results show that the success rate of robot return is 93.3% in random posture and with various tools.
Keywords:industrial robot;homing method;spatial structure;path design;decision tree algorithm;k-nearest neighbour algorithm
0 引言
隨著工業機器人的應用范圍越來越廣泛,工業機器人技術的發展已成為衡量一個國家科技和制造業水平的重要標志[1]。為降低人工勞動強度,提高生產效率,降低生產成本,企業廣泛引進工業機器人代替人工進行生產作業[2]。然而企業共同面臨的問題是生產人員未經過系統的操作培訓,難以熟練地使用工業機器人,一旦機器人因為故障或不當操作等原因停機于某個隨機位置,操作人員難以使機器人回到至初始位置重新投入運行。
工業機器人的回位問題屬于避障路徑規劃的范疇。現階段,面對較為復雜的工作場景時,常采用搜索算法,如A*算法[3-4]、人工勢場法[5-6]、遺傳算法等[7-8],這些方法在多關節工業機器人的應用中存在算法復雜度較高、實現較復雜、搜索緩慢等問題;另外還有利用傳感器獲取障礙物信息,通過網格表示機器人所處的環境,根據蟻群算法、粒子群算法等[9]引導機器人進行避障路徑規劃。這些方法通過建立目標吸引函數,利用自適應學習機制,提高最優路徑的選擇概率,其實現相對容易,但往往需要較高的硬件成本。
1 回位問題描述
1.1 機器人位姿及TCP概述
基坐標系是為確定空間中某一點的位置和姿態而在空間上進行定義的笛卡兒坐標系,表示為{A}。基坐標系中的任一點p的位置信息可由一個矢量AP在基坐標系下的坐標分量進行描述:
式中:px、py、pz是點p在基坐標系中各軸向的坐標分量;AP上標表示基坐標系{A}。
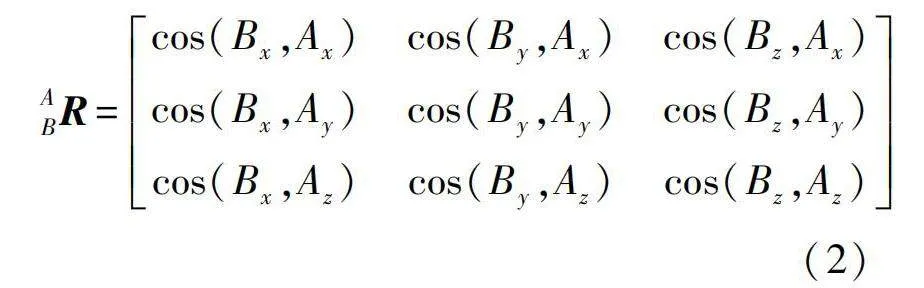
除了位置信息外,還需要描述點p在空間的姿態,建立一個以p點為原點的坐標系{B},并給出{B}坐標系相對于基坐標系{A}的方向余弦矩陣來表示點p相對于基坐標系的姿態信息[10]:
式中:ABR表示p點的坐標{B}相對于基坐標{A}的旋轉矩陣;cos(·,·)表示坐標{B}在各軸矢量上與基坐標{A}各軸矢量間夾角的余弦。
綜合位置信息和姿態信息,空間中的一點p的位姿描述為{PB,ABR},PB為p點位置信息相對于基坐標系{A}的位置矢量[11-12]。
為了描述工具在坐標系中的位置和姿態,需要建立一個工具坐標系TCS(tool coordinate system),工具坐標系的原點即工具中心點TCP(tool center point) [13]。工業機器人的TCP位姿信息{PB,ABR}一般情況下轉換為一個一維數組表示:[x,y,z,rx,ry,rz],其中數組的前3項[x,y,z]表示TCP在基坐標系中各軸向的坐標分量;后3項[rx,ry,rz]表示各軸矢量上與基坐標各軸矢量間的夾角角度值。
1.2 回位問題分析
在工業應用中,TCP存在一個初始位姿,機器人運行中因故停機使TCP停止于另一個位姿,結束后續的作業步驟,從當前位姿移動至初始位姿的這一過程即是機器人回位過程。在實際情況中,由于作業環境狹小且不規則;兩個位姿路徑之間存在障礙物阻隔;TCP因攜帶多種類工具,需要以不同方式移動至初始位姿;機器人本身多連桿機構的機械約束等原因導致TCP往往不能夠直接由停止位姿移動至初始位姿。因此,回位問題需要解決在機器人多連桿機構的約束下,不產生碰撞地將可能攜帶多種類工具的TCP從一個起始位姿移動至初始位姿。
2 方法概述
本文回位方法的原理是將隨機的位姿及狀態通過模型分類判定為若干個狀態分類,通過各分類狀態對應的回位路徑以盡可能小幅度的位移將機器人移動至該狀態分類下的示教點,再以此示教點移動至初始位置。
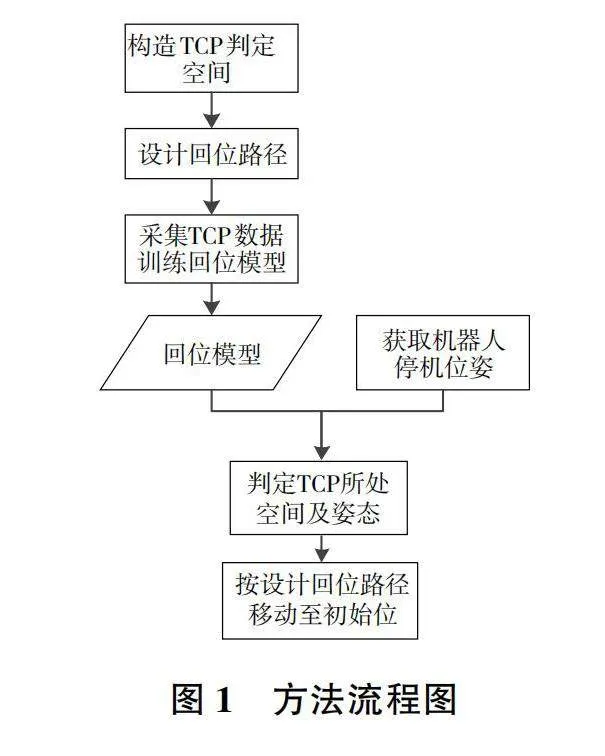
本文方法的總體流程為:首先構造用于判定TCP所處位置及狀態的空間;然后根據不同的空間類型設計回位路徑;之后通過收集機器人處于各空間的位姿數據訓練區域判定模型,匹配與之對應的回位路徑;最后將作業中機器人位姿信息導入訓練完成的模型,判定TCP所處的空間及位姿狀態,根據模型輸出的回位路徑退回至確定的示教點,最終返回初始位置,流程如圖1所示。
3 回位路徑設計
3.1 構造位置判定空間
解決工業機器人回位問題的關鍵是正確判定機器人的起始位姿,其中TCP的位置數據在回位決策中占有最大的權重。本節提出3種空間的劃分方法用于TCP位置的判定。
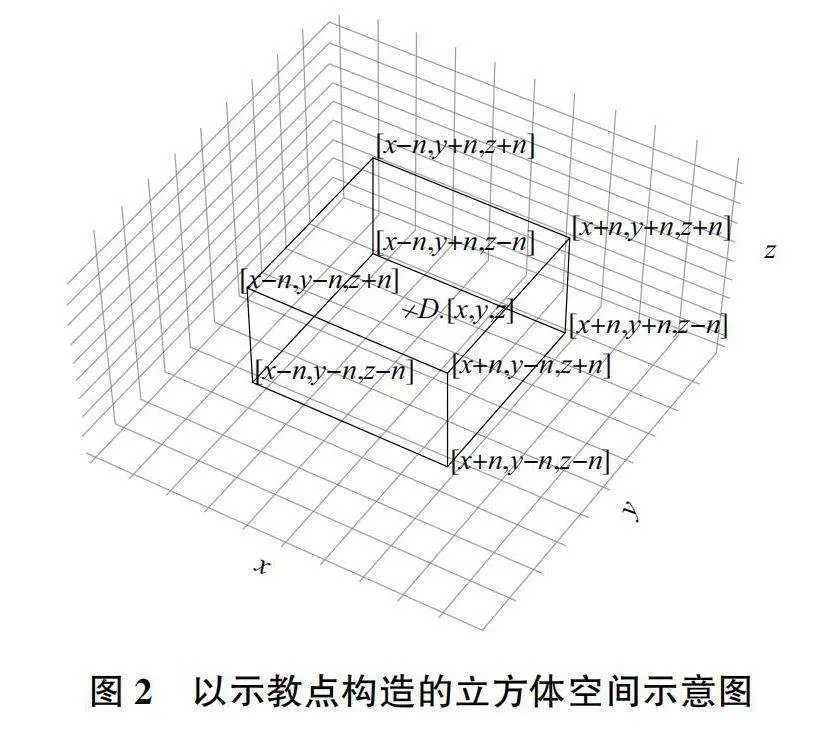
1)以示教點為中心構造正方體空間
工業機器人最常用的作業模式是依賴于示教點按步驟完成不同的工序。在這種作業模式下,機器人回位時的起始位置可能正好處于示教點位置或只移動了極小的一段距離。構建以示教點為中心的小立方體空間用于判定TCP是否處于某個示教點鄰近的位置。示教點TP在基坐標系下的矢量如式(3)所示。
[Tpx, Tpy, Tpz]為該示教點在基坐標系各軸的分量,在p點各軸分量上各加減一個較小的數值n即可得到由8個分量值坐標組成的立方體空間Ct,如圖2所示。
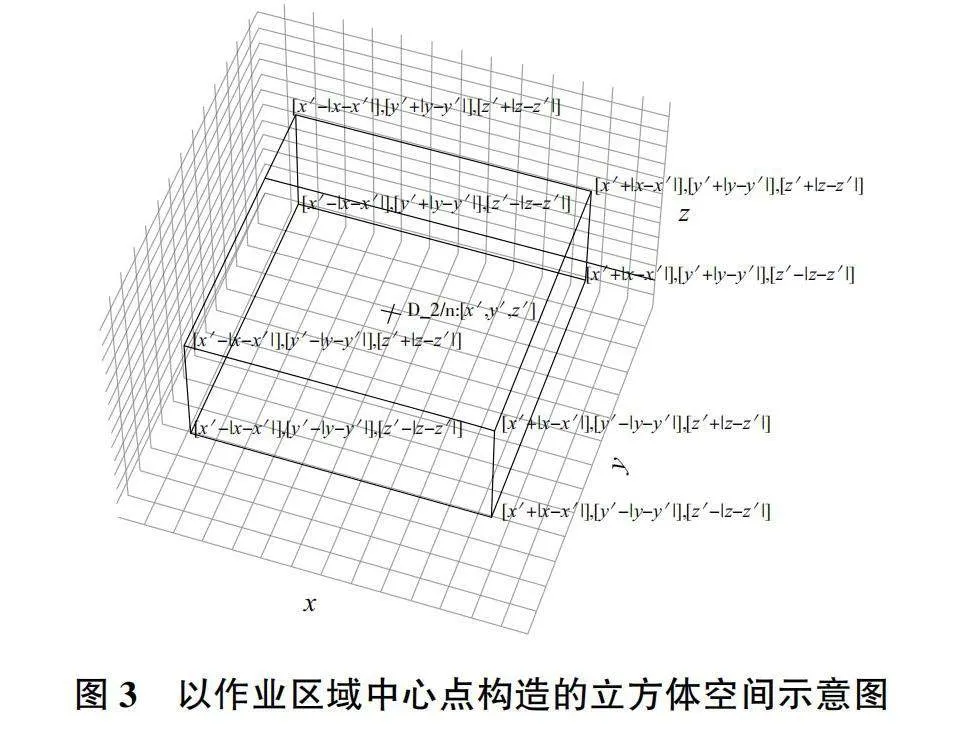
2)以作業區域中心構造立方體空間
工業機器人另一種較為常用的作業模式是基于一個作業區域的示教點TP進行位置運算后得到Wp1、Wp2,…,Wpn點,TCP在Wp1、Wp2,…,Wpn點完成工作后返回p點結束一次作業。在這種作業模式下,機器人回位時的起始位置很大概率位于作業區域內的某個位置。假設由WP點計算得到了n個作業點,則WP2/n點為作業區域的中心點。作業區域起始點WP在基坐標系下的矢量描述為
作業區域中心點p2/n基坐標系下的矢量描述為
式中:[Wpx, Wpy, Wpz]為點p在基坐標系各軸的分量;[Wp′x, Wp′y, Wp′z]為點WP2/n在基坐標系各軸的分量。點p2/n各軸向分量到作業區域邊緣的距離為[|Wpx-Wp′x|, | Wpy-Wp′y|, | pz-p′z|],以作業區域中心點的坐標分量值沿各軸向各加減一個到作業區域邊緣的距離即可得8個分量值坐標組成的立方體空間Cw,如圖3所示。
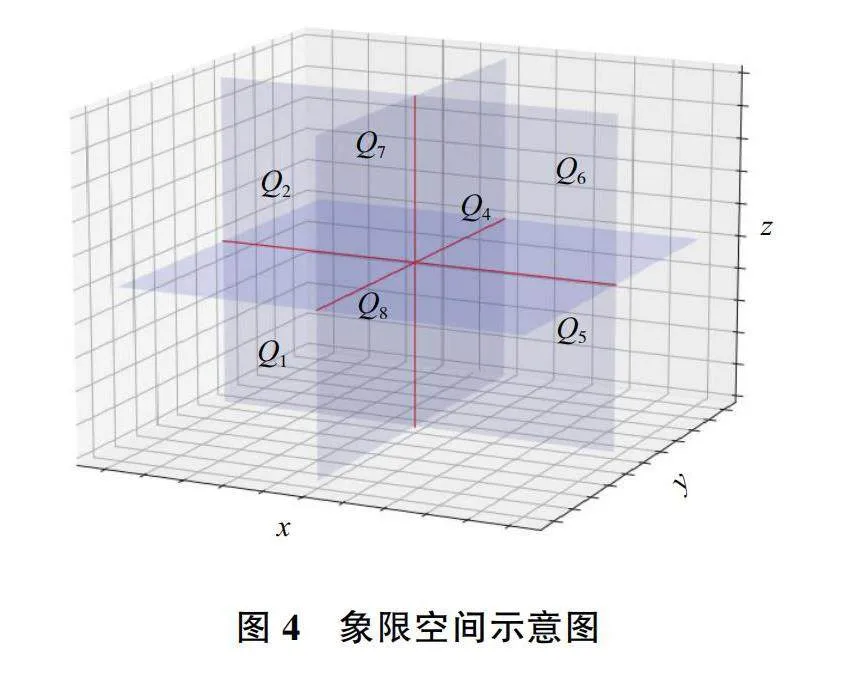
3)全區域構造象限空間
為了使得機器人無論處于任何起始位置都能回位初始位置,在兩類立方體空間之外還需要對機器人所有可達區域進行象限劃分。以基坐標系原點O為象限區域的分界點,點O在基坐標系下的矢量描述為
以分界點O的各軸向將整體空間劃分為8個區域,各個區域的范圍表示為Qi,如圖4所示。
3.2 回位路徑設計
本文的目標是使工業機器人由停機位置移動至初始位置,因此需要依據TCP回位時的起始位姿設計合適的回位路徑使機器人完成回位動作,并建立起機器人位置信息、姿態信息等特征和回位路徑之間的對應關系,為回位模型的樣本提供模板。
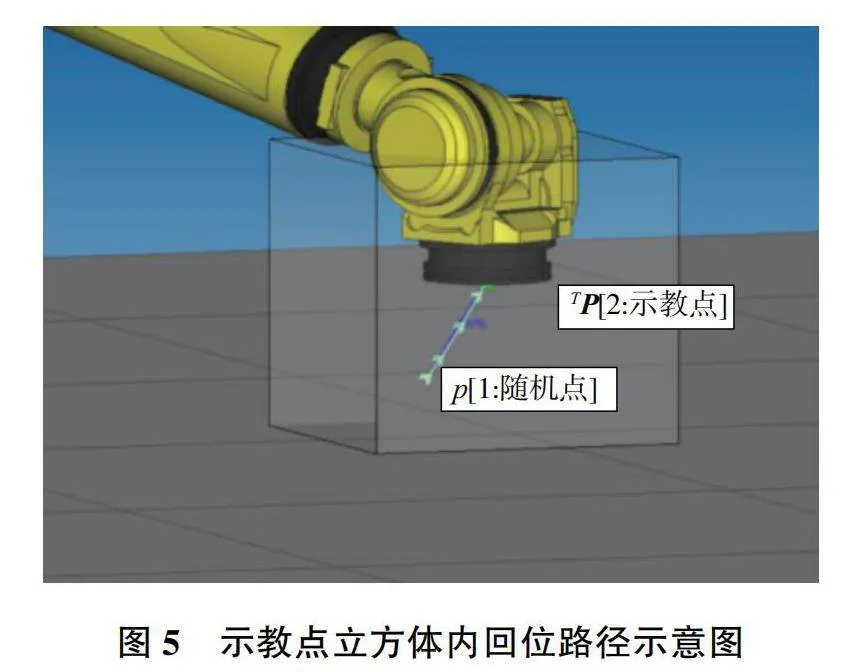
1)示教點立方體類回位路徑設計
機器人回位的起始位置處于某個示教點為中心的小立方體內時,回位方式應先移動至對應此立方體的示教點位,如圖5所示。
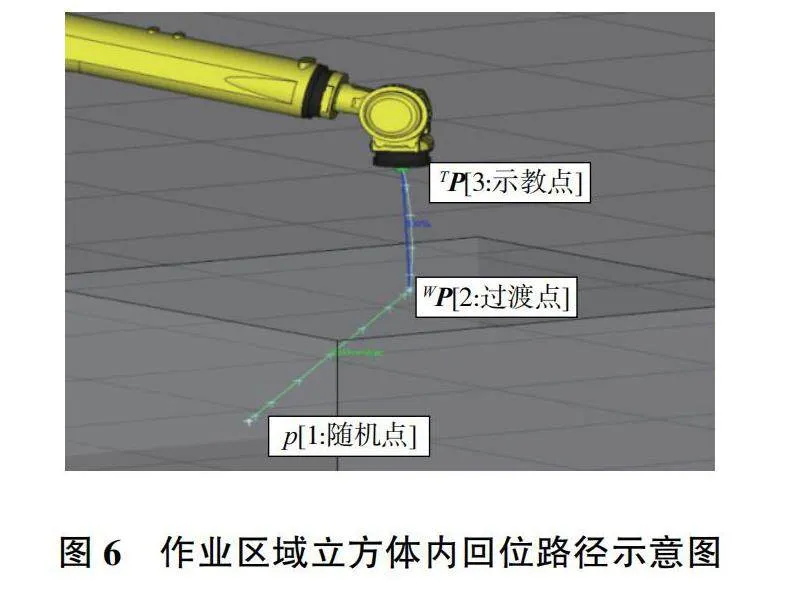
2)作業區域立方體類回位路徑設計
機器人回位的起始位置處于某個作業區域立方體內時,考慮到機器人在同一作業區域可能會有多種姿態,所以回位方式應首先結合機器人的當前姿態來判斷是否需要變換至過渡點相近的姿態之后再移動至此作業區域內的過渡點,然后移動至與作業立方體內過渡點鄰近的示教點,如圖6所示。
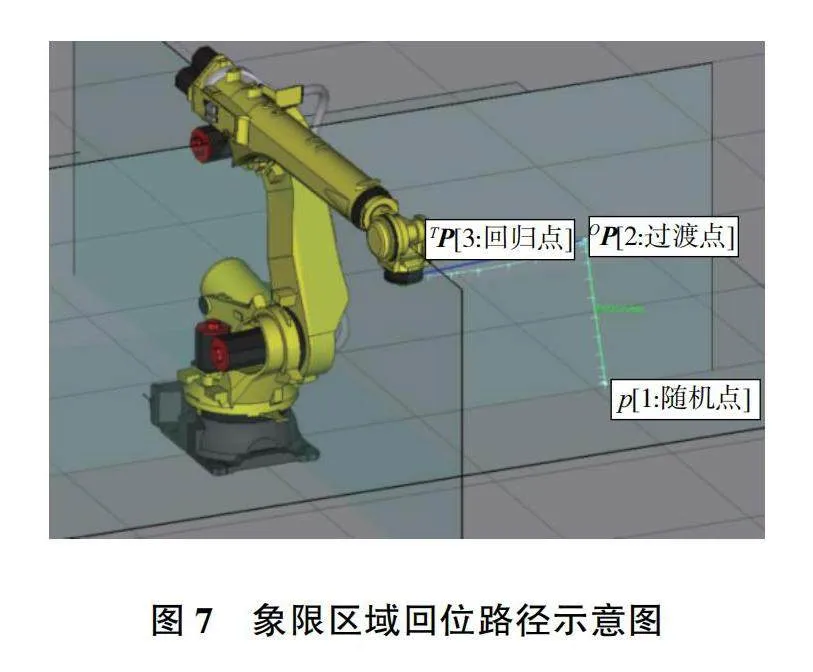
3)象限區域類回位路徑設計
機器人回位的起始位置處于某個象限區域內時,說明機器人停機于作業區域或示教點之間的路徑上。此狀態下機器人可能存在多種工具和姿態,回位方式應首先結合機器人的當前工具種類選擇目標過渡點;然后通過當前姿態來判斷是否需要變換至過渡點相近的姿態之后再移動至此作業區域內的過渡點;最后移動至與象限區域過渡點鄰近的示教點,如圖7所示。
4 回位路徑決策
4.1 準備數據樣本
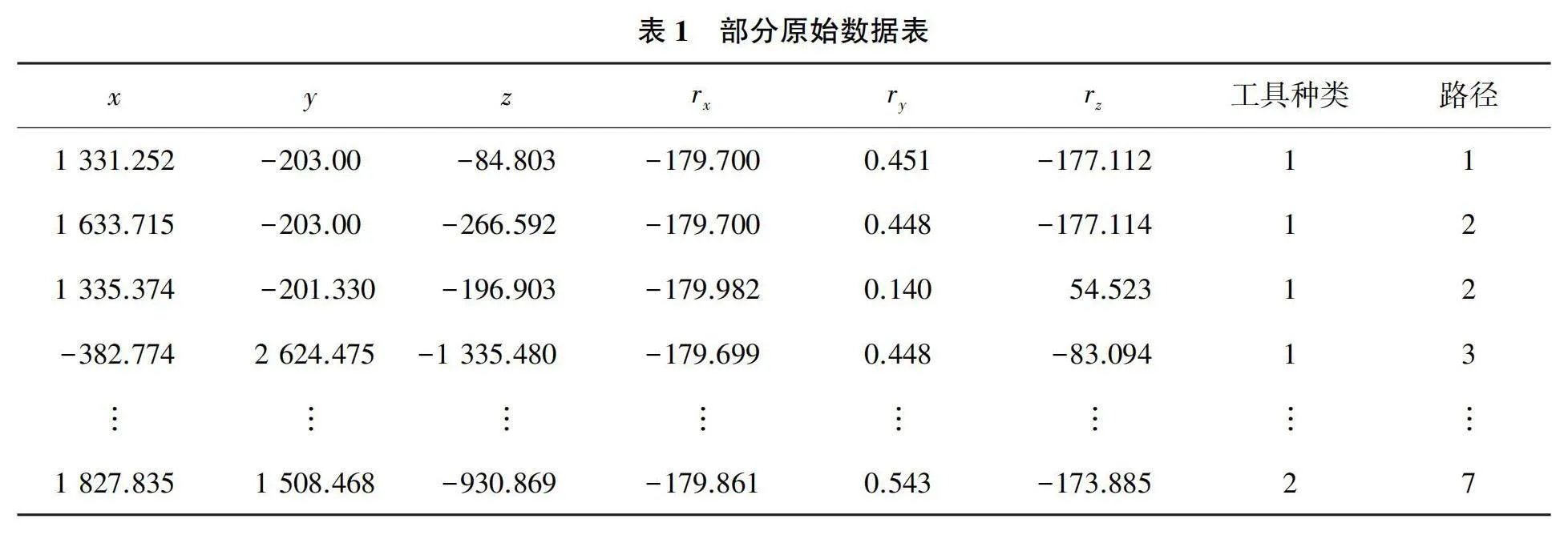
回位路徑的判定基于決策樹算法,對此模型進行訓練,需要對機器人起始狀態數據進行統計,作為訓練樣本。數據包括TCP的位置數據、姿態數據、工具種類編號和機器人回位路徑編號,其中位置數據、姿態數據、工具種類編號作為樣本的特征值,將在此狀態下機器人的回位路徑編號作為樣本的目標值,如表1所示。
4.2 原始數據分類化
由于決策樹算法對離散數值類型的特征值響應較差,所以需要使用k-近鄰算法將離散的TCP位置數據和姿態數據轉換為類別數據。由于機器人會以不同的位姿進行作業,所以對于同一個立方體空間除了空間編號,還需要對其所有的作業姿態進行編號。在作業區域立方體中記錄數據時需要將機器人TCP以作業時的各個姿態移動至作業區域立方體空間中,以不同的作業姿態移動至不同的位置若干次,記錄TCP的姿態數據和所處空間中姿態編號。
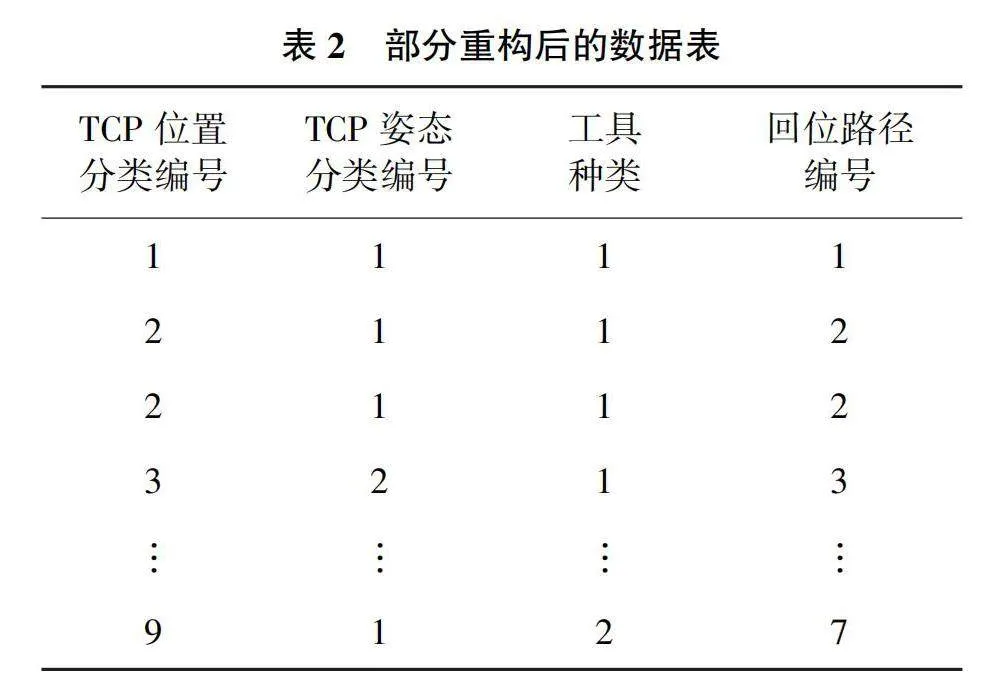
使用sklearn模塊中的KNeighborsClassfier類進行k-近鄰算法建模。將訓練集和訓練集對應的標簽輸入KNeighborsClassfier.fit()函數進行模型訓練,得出的結果即是將TCP的離散位置數據和姿態數據轉換為空間編號和姿態編號的分類。以分類后的數據樣本中TCP位置分類編號、TCP姿態分類編號、工具種類編號為特征值,回位路徑編號為目標值,如表2所示。
4.3 決策樹模型訓練
1)決策樹算法簡介
決策樹(decision tree,DT)算法是一種有監督的學習模型,它是一個由內節點和葉節點構成的樹型結構[14]。采用決策樹中的C4.5算法,其樣本特征的劃分依據為信息增益比。設樣本中的某個特征A,其特征熵為
式中:i表示特征A的n種取值;|D|表示劃分前的樣本總數;|Di|表示劃分的樣本數目。
特征A的信息增益為
式中:H(D)表示樣本的總熵值;HA(D)表示特征A的特征熵。
信息增益比為
2)模型訓練
使用sklearn模塊中的DecisionTreeClassifier類進行決策樹算法建模。決策樹的模型存在3個超參數:限制樹的最大深度(max_depth);1個節點在分支后的每個子節點都必須至少包含的樣本數(min_samples_leaf);1個節點至少要包含的樣本數(min_samples_split)[15]。為了在回位路徑決策中取得較好剪枝效果,將訓練集進行10等分用于交叉驗證,對預先設定max_depth=[3,5],min_samples_leaf=[5,8,10],min_samples_split=[1,2,3]進行的網格搜索,得出模型在該數據樣本下的最優超參數。
將訓練集和訓練集對應的標簽輸入DecisionTreeClassifier.fit()函數進行模型訓練,此模型即為判定在擁有某種位置編號、姿態編號和工具種類的特征下所對應的回位路徑編號。
5 試驗
5.1 系統硬件構成
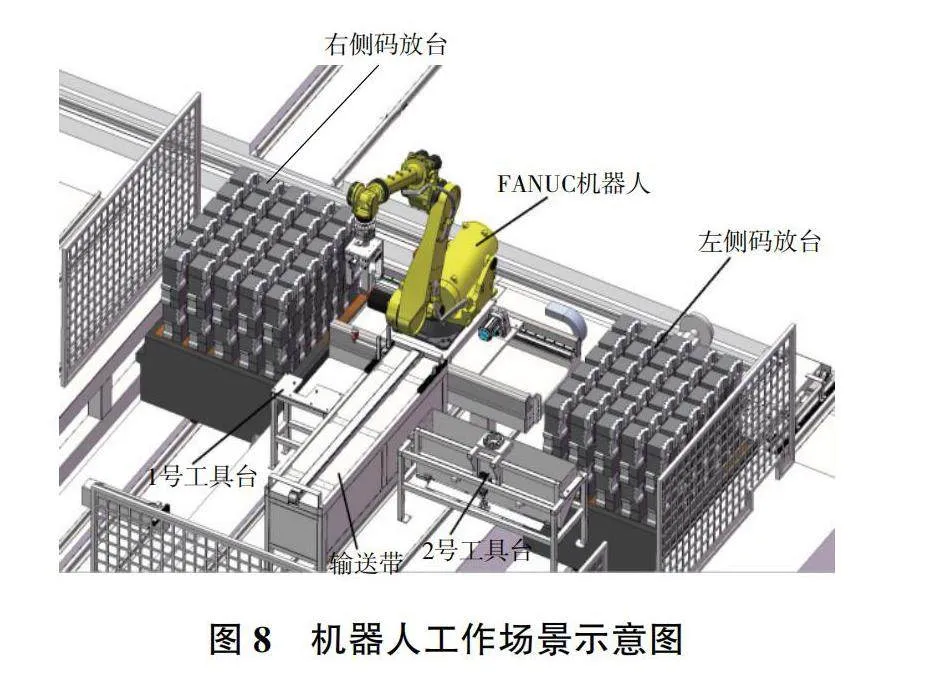
采用FANUC R-2000iC-210L型機器人進行回位試驗和分析;Raspberry Pi-4B型嵌入式計算機通過k-近鄰算法對輸入的機器人離散位姿數據進行分類化,加載決策樹模型對機器人回位路徑進行決策;機器人與計算機通過Modbus-TCP協議進行數據交換。
5.2 試驗流程及結果統計
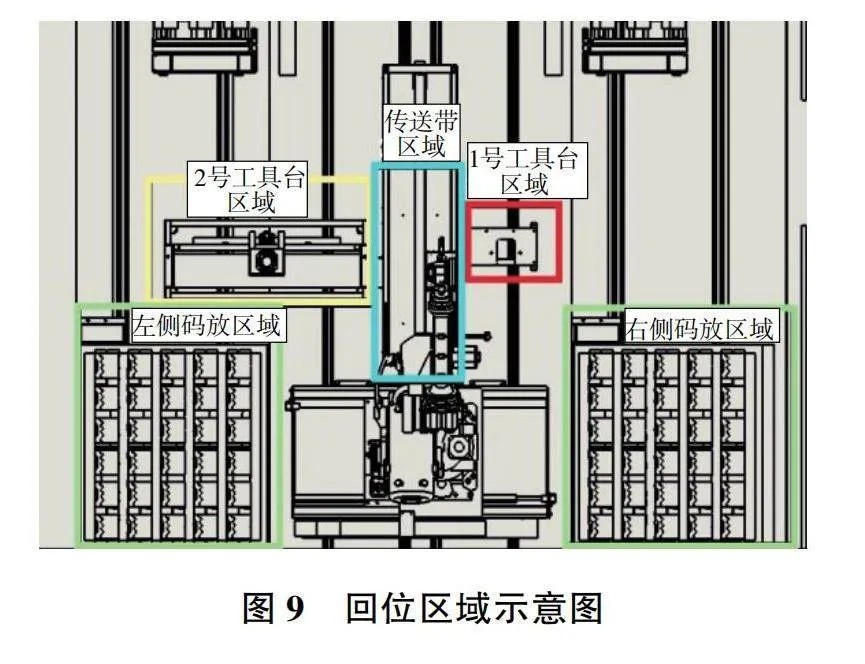
在試驗區域中,選取輸送帶抓取區域、左側碼放區域、右側碼放區域、1號工具臺區域、2號工具臺區域和各區域間部分為試驗區域,如圖8—圖9所示。
將TCP隨機停止于各區域內,采集機器人的位姿信息,即包含位置信息和姿態信息的一維數組;將采集的一維數組進行拆分,分離位置信息[x,y,z]和姿態信息[rx,ry,rz];將位置信息和姿態信息通過k-近鄰算法進行分類處理;采集機器人當前攜帶的工具編號等特征信息;將位置分類編號、姿態分類編號和工具編號組裝成待回位機器人的特征信息;將特征信息導入訓練完成的決策樹模型獲取回位路徑編號;按照路徑編號執行分類設計的機器人回位程序;觸發回位信號觀察回位執行結果。
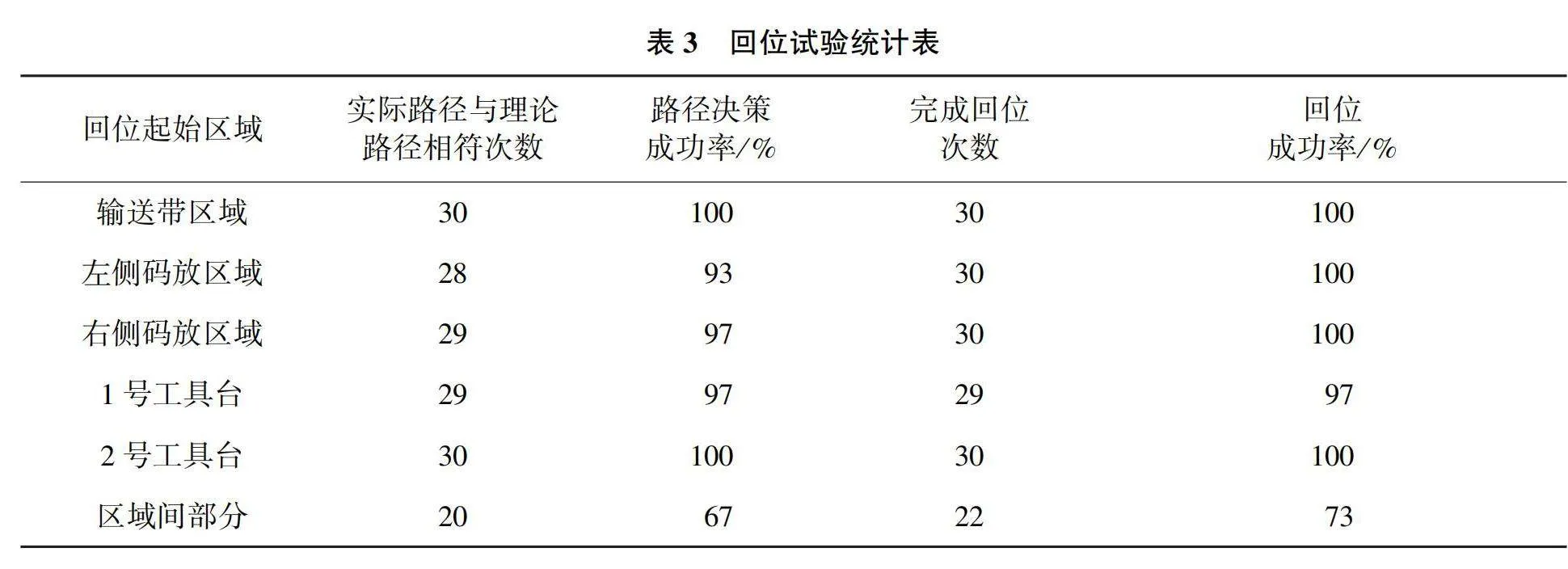
回位試驗時將機器人運行速度設置為10%,以各區域內隨機位置為回位起點試驗30次。TCP處于輸送帶區域時,理論路徑為起始點直線運行至初始位置,觀察實際路徑與理論路徑全部符合;TCP處于左側碼放區域和右側碼放區域時,理論路徑為起始點直線移動到各自碼放區域內的過渡點后再移動至初始位置,觀察實際路徑中左側碼放區域有2次未經過渡點直接移動至初始位置,右側碼放區域有1次未經過渡點直接移動至初始位置;TCP處于1號工具臺和2號工具臺時,理論路徑分為帶有工具和沒有工具兩種情況,帶工具狀態時為直接移動至更換工具位置,無工具狀態為先移動至更換工具位置后再移動至初始位置,觀察實際路徑1號工具臺區域有1次帶有工具狀態回位至初始位置;TCP處于區域間部分時,理論路徑是根據所處鄰近區域及所帶工具狀態共同決定的,觀察實際路徑有2次不符合理論路徑,有8次因位姿狀態導致路徑決策失敗而無法成功回位。回位試驗結果統計如表3所示。
5.3 結果分析
分析試驗結果可知,本文方法在解決不同區域類型的回位問題上存在性能差異。輸送帶區域大多是示教點且姿態單一,通過本文方法可以快速準確地定位TCP所處的示教點立方體空間,進而通過事先設計的回位路徑回位;在左、右碼放區域多為以作業區域立方體回位的類型,姿態較為單一,但有不同的工具類型,通過本文方法可以較為準確地定位TCP所處的作業空間,進而移動至過渡點后回位至初始位置;工具臺區域與輸送帶區域類似,多為示教點但有不同工具類型,本文方法針對此類型的回位具有良好的表現。各空間區域間部分的情況最為復雜,位姿多樣且可能攜帶不同的工具類型,理論上處于此類空間中的TCP應該判定為象限空間分類進行回位,通過對決策失敗的觀察,失敗原因多是由于TCP未決策為象限空間分類而是判定為鄰近的作業區域空間分類,從而導致姿態不匹配而無法完成回位任務,還有少部分原因是因為姿態原因導致無法移動至過渡點而導致回位失敗。
6 結語
本文針對生產應用中,工業機器人非正常停機后難以回位的問題提出了一種回位方法。本方法相較于傳統的搜索算法較容易實施,同時依賴的硬件成本較低,便于應用于工業環境中。通過一例機器人回位試驗驗證,可以滿足工業應用中機器人回位需求。本文提出的方法針對處于各劃分空間領域之間的象限區域回位有待優化,在后續的研究中應設置各類空間的閾值以及增加象限空間,以處理TCP不同姿態的機制。
參考文獻:
[1] 徐博凡. 基于視覺引導的機器人識別及柔性抓取系統研究[D]. 鄭州:鄭州大學,2018.
[2] 孫中國. 基于機器視覺的面粉袋碼垛機器人研究[D]. 濟南:山東建筑大學,2015.
[3] HART P E,NILSSON N J,RAPHAEL B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Transactions on Systems Science and Cybernetics,1968,4(2):100-107.
[4] 賈慶軒,陳鋼,孫漢旭,等. 基于A*算法的空間機械臂避障路徑規劃[J]. 機械工程學報,2010,46(13) :109-115.
[5] 何兆楚,何元烈,曾碧. RRT與人工勢場法結合的機械臂避障規劃[J]. 工業工程,2017,20(2):56-63.
[6] 王俊龍,張國良,羊帆,等. 改進人工勢場法的機械臂避障路徑規劃[J]. 計算機工程與應用,2013,49(21):266-270.
[7] 王雷,李明. 改進自適應遺傳算法在移動機器人路徑規劃中的應用[J]. 南京理工大學學報(自然科學版),2017,41(5) :627-633.
[8] FANG N,ZHOU J Z,ZHANG R,et al. A hybrid of real coded genetic algorithm and artificial fish swarm algorithm for short-term optimal hydrothermal scheduling[J].International Journal of Electrical Power amp;Energy Systems,2014,62: 617-629.
[9] 熊俊濤,李中行,陳淑綿,等.基于深度強化學習的虛擬機器人采摘路徑避障規劃[J].農業機械學報,2020,51(增刊2):1-10.
[10] 賈亞洲.基于虛擬樣機的特種機器人關鍵機構仿真研究[D].洛陽:河南科技大學,2019.
[11] 李虎.六自由度噴涂機器人結構方案設計與位姿誤差分析[D].武漢:華中科技大學,2012.
[12] 黃奎.多關節式坐標測量系統的關鍵技術研究[D].武漢:華中科技大學,2010.
[13] 段海峰,江麗珍,劉建光,等. 微型電機外殼沖壓送料機器人的編程及應用[J]. 現代制造工程,2020(7):6-10.
[14] 孫向陽. 基于XGBoost算法的竊電用戶行為研究[D].蘭州:蘭州交通大學,2018.
[15] 任強,桑世葉,劉長寧. 重樓屬植物在線分類鑒定系統的設計與實現[J]. 計算機時代,2020(9):72-75.
收稿日期:2023-02-20
