并聯機械手冗余最小誤差識別及校準實驗驗證
2024-08-28 00:00:00馬廣建
機械制造與自動化 2024年4期

摘 要:針對并聯機械手的運動精度,以某三自由度主軸頭為例,提出一種基于最小誤差模型的運動精度校準方法。通過消除冗余幾何源誤差,建立包含最少幾何源誤差的最小誤差模型,采用蒙特卡羅法模擬進行幾何源誤差靈敏度分析,研究各幾何源誤差對終端精度的相對影響。在此基礎上提出粗校準和精校準相結合的分層辨識策略,以實現并聯機械手的精度校準。通過校準實驗測試表明:所提出的校準方法能夠大幅降低并聯機械手的終端誤差,驗證了所提校準方法的有效性。
關鍵詞:并聯機械手;運動學校準;誤差建模;敏感性分析;誤差校準
中圖分類號:TP241 文獻標志碼:B 文章編號:1671-5276(2024)04-0241-04
Identification of Redundant Minimum Error of Parallel Manipulator and Experimental Verification
MA Guangjian
(Henan Institute of Artificial Intelligence, Zhengzhou 450046, China)
Abstract:Aimed at the motion accuracy of redundant driven parallel manipulator, and a three degree of freedom spindle head taken as an example, a motion accuracy calibration method based on minimum error model is proposed.The redundant geometric source error is eliminated to establish the minimum error model including the minimum geometric source error, and the sensitivity of geometric source error is analyzed by Monte Carlo simulation to study the relative impact of each geometric source error on terminal accuracy. On this basis, a hierarchical identification strategy combining coarse calibration and fine calibration is proposed to realize the accuracy calibration of redundant driven parallel manipulator. The calibration experiments show that the proposed calibration method can greatly reduce the terminal error of redundant driven parallel manipulator, and verify the effectiveness of the method.
Keywords:redundant driven parallel manipulator; sports school admission; error modeling; sensitivity analysis; error calibration
0 引言
數控混合五軸加工是解決復雜幾何曲面零件的重要途徑[1]。并聯機器手作為主軸頭高質量加工的重要部件,是實現復雜幾何零件加工精度的重要保障。與非冗余驅動形式相比,冗余驅動并聯機器手(redundant driven parallel manipulator, RAPM)通常具有更好的靈巧性、更高的剛度和更好的動態性能等相對優勢[2]。采用三自由度RAPM作為主軸頭進行高質量加工時,必須保證其運動精度。
近年來,冗余驅動并聯機器人引起了學術界和工業界的高度關注。機器人運動精度的校準是實現機器人高運動精度的重要手段。YANG等[3]根據并聯機構逆運動學誤差建模理論,提出了一種基于Matlab的數值仿真方法,并采用最小二乘法識別6自由度并聯機構的結構參數,通過仿真驗證了該標定算法的魯棒性和有效性。ROSYID等[4]采用迭代法對混合運動機床和3-P(Pa)S并聯主軸頭進行了誤差識別,采用非線性最小二乘算法對機構幾何參數進行了估計。周星等[5]針對6關節機器人的標定方法,提出了5點優選TCP標定優化改進模型,通過仿真和實驗驗證了該改進算法標定精度的有效性。王憲倫等[6]在串聯機器人單孔標定方法的基礎上,通過MDH誤差建模提出了多孔標定優化方法,該方法通過實驗表明具有較高的定位精度。朱衡等[7]采用粒子群算法對6自由度機械臂關節參數進行了標定,該方法具有較好的收斂性,同樣通過實驗表明該方法在提升標定精度上具有一定的優勢。陳爽等[8]采用PSO算法對工業機器人的定位精度進行了優化改進,通過建立D-H參數誤差模型標定位姿平臺兩點之間的絕對距離,有效提升了標定精度。王遠東等[9]針對3-R2U2S并聯機器人的參數標定,分析了影響機構參數變化的各種誤差源,在此基礎上建立了機器人運動學誤差模型,提出了自動協作原理的參數標定方法,該方法通過實驗得到了有效驗證。
本研究在前人研究的基礎上,提出了粗校準和精校準相結合的分層辨識策略,以實現并聯機械手的精度校準。最后通過校準實驗驗證了所提校準方法的有效性。
1 并聯機械手最小誤差模型
1.1 并聯機械手模型
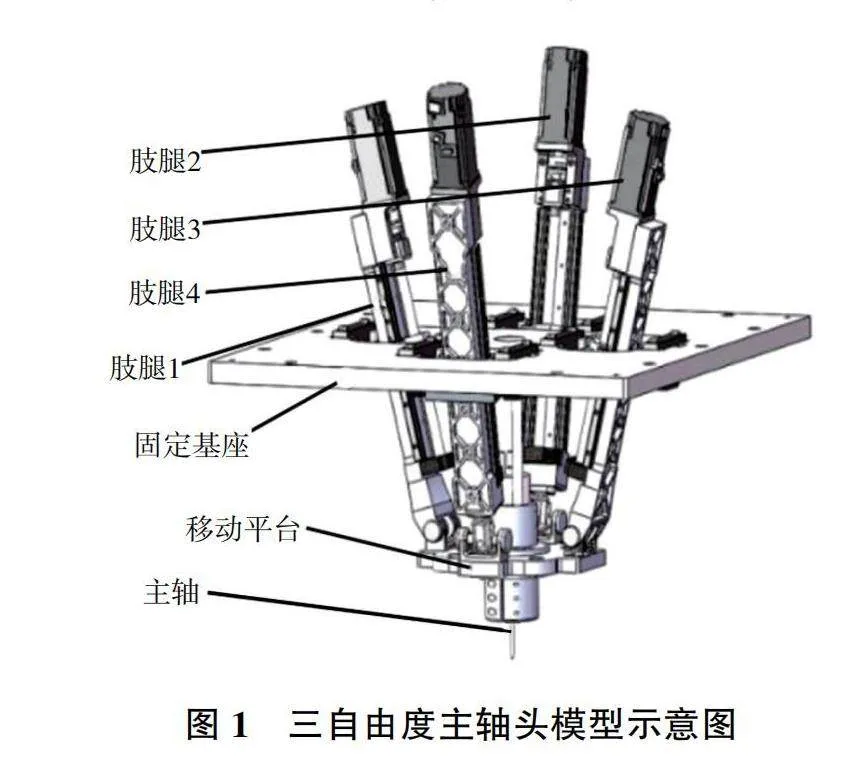
本研究的并聯機械手模型如圖1所示,其后面的拓撲結構為2UPRamp;2RPS的RAPM。其中,“U”、“R”、“S”、“P”分別代表萬向節、轉動關節、球形關節和驅動移動關節。它由一個固定底座、一個移動平臺、兩個相同的UPR肢腿和兩個相同的RPS肢腿組成,主軸頭具有3自由度。肢腿1和肢腿3為對稱分布的UPR肢腿,肢腿2和肢腿4是兩個對稱分布的RPS肢腿。各肢腿分別與固定基座和移動平臺在Ai點和Bi點相連。
1.2 冗余誤差的消除
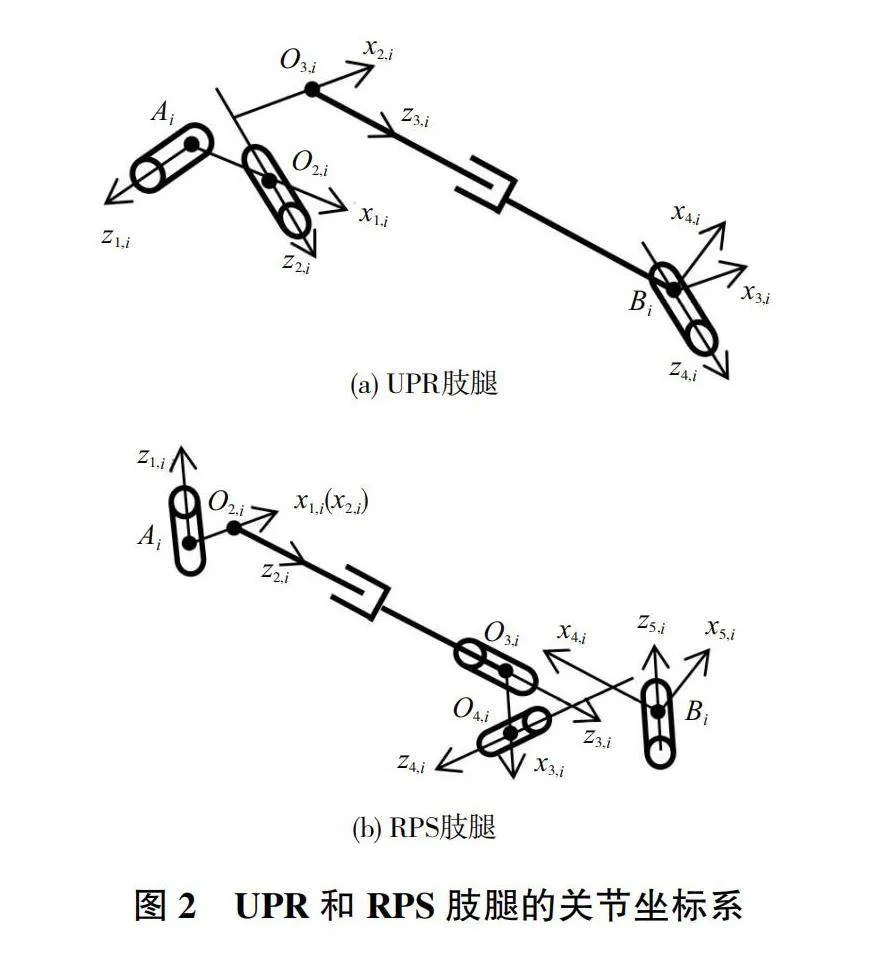
為了便于誤差建模,圖2給出了UPR和RPS肢腿中的所有機身固定關節坐標系,Oj,i-xj,iyj,izj,i定義為第i肢腿第j個單自由度關節的機身固定坐標系,其中zj,i軸與關節軸重合,xj,i軸與zj,i軸和zj+1,i軸的公法線重合,Oj,i是zj,i軸和xj,i軸的交點,yj,i軸由右手定則確定。對于每個肢腿,全局坐標系O-xyz被視為第0個關節坐標系,機身固定坐標系O′-uvw被視為最后一個關節坐標系,點Ai與O1,i重合,Bi與點O4,i(i=1,3)重合。
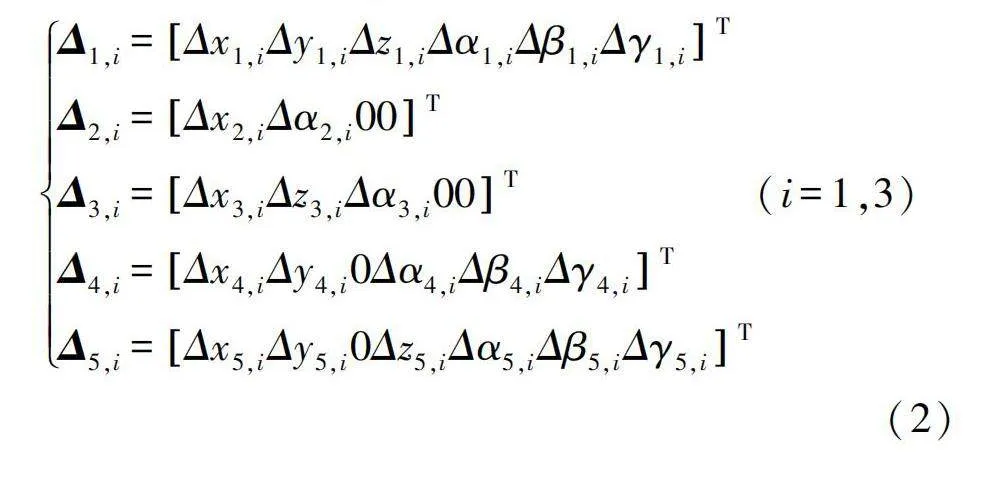
利用上述定義,得到了相鄰關節與固定坐標系之間的幾何關系,Oj,i-xj,iyj,izj,i相對于Oj-1,i-xj-1,iyj-1,izj-1,i的幾何誤差可表示為
式中[Δxj,iΔyj,iΔzj,i]T和[Δαj,iΔβj,iΔγj,i]T分別表示位置誤差和方向誤差。如果一個幾何源誤差依賴于另一個幾何源誤差,則可以定義為冗余幾何源誤差。為了簡化誤差模型,消除幾何源誤差,本研究提出了消除冗余幾何源誤差的一般原則[10]:
1)若第j個單自由度關節為移動關節,則Δzj+1,i為冗余,可合并為0偏移;
2)如果j-1≠0,則第(j-1)個關節不是移動關節,由于Δyj,i和Δβj,i沒有包含在變換中,其為冗余的,Δγj,i可合并為關節運動誤差;
3)如果zj,i軸平行于zj-1,i軸,則Δxj,i,Δαj,i,Δzj+1,i和Δγj+1,i是冗余的,它們可以合并為Δxj-1,i,Δαj-1,i,Δzj,i和Δγj,i。
根據上述原理消除冗余幾何源誤差后,可得UPR肢腿的幾何源誤差為:
2 實驗驗證
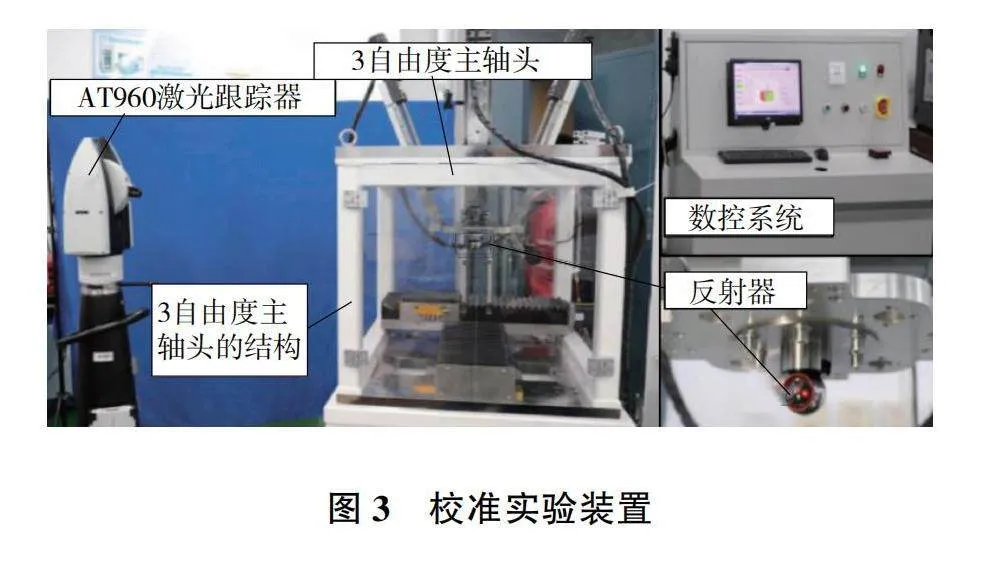
圖3所示為粗識別和精識別的實驗裝置,3自由度主軸頭由4個伺服電機驅動,由數控系統控制。通過將運動數據導入數控系統,可將移動平臺調整到目標姿態。在此基礎上,利用AT960激光跟蹤儀進行校準實驗,跟蹤激光反射點的位置。在測量規劃過程中,測量裝置應遍歷主軸頭的所有自由度,且測量的構型應包括易發生最大位置誤差的工作空間邊界。
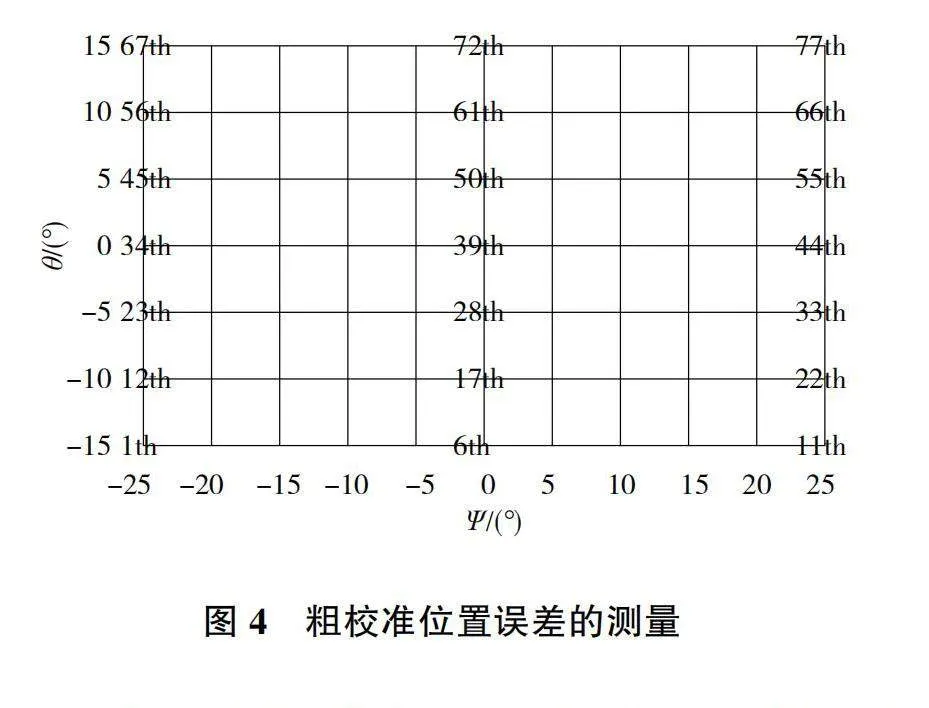
測量的結構被規劃為在3個等距平面上等間距的點,在z=200mm平面上,ψ的范圍為-25°~25°,θ的范圍為-15°~15°;在z=220mm平面上,ψ的范圍為-25°~25°,θ的范圍為-20°~20°;在z=240mm平面上,ψ的范圍為-25°~25°,θ的范圍為-20°~20°。旋轉角度的增量步長設為5°。
按照平面z=200mm、z=220mm、z=240mm的先后順序進行測量。以平面z=200mm為例,測量的順序如圖4所示,可以看出各坐標軸的位置誤差,當θ從-15°增大到15°時,ψ從-25°增大到25°。
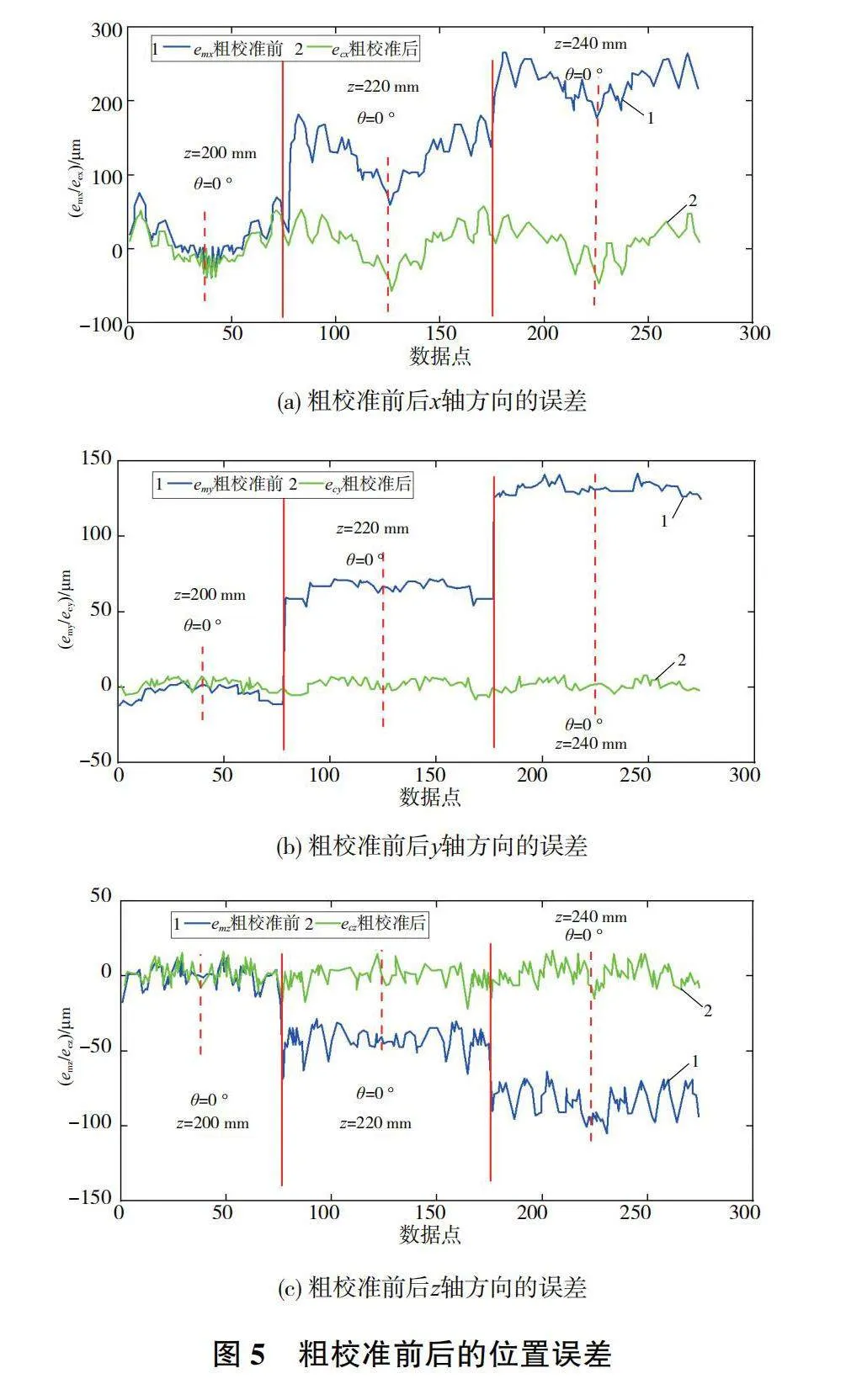
由此得到粗校準前后3個坐標軸的位置誤差如圖5所示,其中emx、emy和emz分別表示em沿x、y和z軸的誤差分量。從圖中可以看出,在每個測量平面上,沿各坐標軸的終端位置誤差相對于軸θ=0°是對稱的。同時,在每個測量平面上,各坐標軸上的位置誤差相對于軸ψ=0°是對稱的。這與2UPRamp;2RPS平行主軸頭的對稱結構類似。
在粗定標前,位置誤差的絕對值是沿每個軸的相鄰測量平面之間的步進增量。對于沿x軸位置誤差emx,在3個測量平面的誤差范圍分別為-100~100 μm、0~200 μm、100~300 μm。對于沿y軸位置誤差emy,在3個測量平面的誤差范圍分別為-25~25 μm、50~100 μm、100~150 μm;對于沿z軸位置誤差emz,在3個測量平面的誤差范圍分別為-50~50 μm、-100~0 μm、-150~-50 μm。3個測量平面上各軸的位置誤差分布是相似的,說明z值的增加導致位置誤差幅值的增加,但不影響θ和ψ軸向角構成平面上的位置誤差分布,這表明存在初始位置誤差,即主軸頭中的零偏移。
粗校準后,沿各軸消除了步進增量,即消除0偏移。沿x軸上的ecx在3個測量平面上的測量范圍為-100~100 μm,沿y軸上的ecy在3個測量平面上的測量范圍為-25~25 μm,沿z軸上的ecz在3個測量平面上的測量范圍為-50~50 μm。這也表明該方法是有效的。
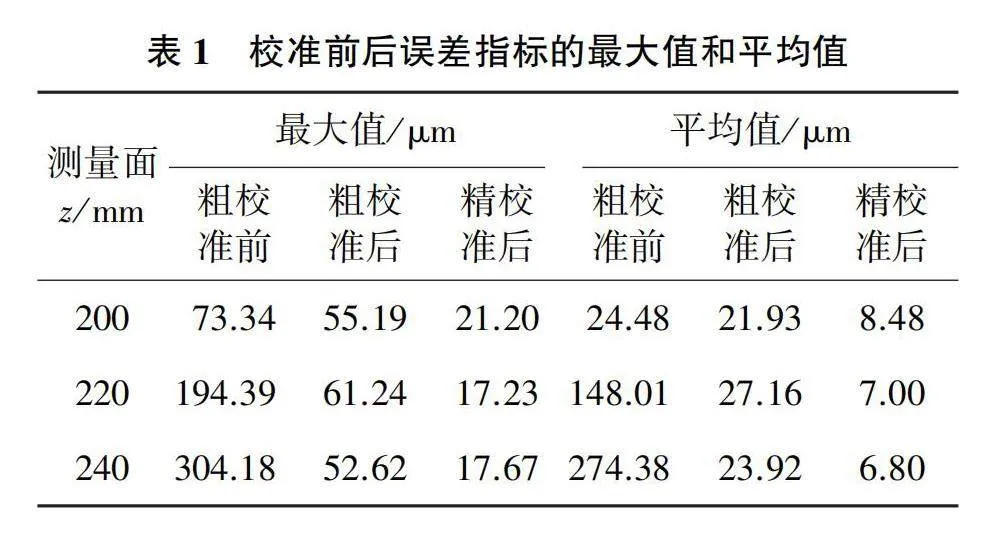
校準前后各測量平面誤差指標最大值和平均值如表1所示。可以看出在各測量平面,經過兩步校準,誤差指數最大值和平均值都得到了大幅降低,這也證明了所提出的兩步校準方法的有效性。
3 結語
本研究提出了一種基于最小誤差模型的并聯機械手運動學校準方法。首先基于并聯機械手肢腿結構特性和各關節相應的坐標系,提出了一種由0偏移量粗識別和幾何源誤差精識別組成的分層識別策略,從而實現并聯機械手的精度校準。最后通過校準實驗測試表明,所提出的校準方法能夠大幅降低并聯機械手的終端誤差,驗證了所提校準方法的有效性。該校準方法也適用于其他類型并聯機械手的精度校準,具有一定的普適性。
參考文獻:
[1] 朱大虎,徐小虎,蔣誠,等. 復雜葉片機器人磨拋加工工藝技術研究進展[J]. 航空學報,2021,42(10):8-30.
[2] 吳錦輝,陶友瑞. 工業機器人定位精度可靠性研究現狀綜述[J]. 中國機械工程,2020,31(18): 2180-2188.
[3] YANG L W,TIAN X Z,LI Z L,et al. Numerical simulation of calibration algorithm based on inverse kinematics of the parallel mechanism[J]. Optik,2019,182:555-564.
[4] ROSYID A,EL-KHASAWNEH B,ALAZZAM A. External kinematic calibration of hybrid kinematics machine utilizing lower-DOF planar parallel kinematics mechanisms[J]. International Journal of Precision Engineering and Manufacturing,2020,21(6):995-1015.
[5] 周星,黃石峰,朱志紅. 六關節工業機器人TCP標定模型研究與算法改進[J]. 機械工程學報,2019,55(11):186-196.
[6] 王憲倫,胡曉偉. 基于多孔標定法的串聯機器人運動學標定研究[J]. 機電工程,2019,36(5):470-474,500.
[7] 朱衡,楊東超,常旭,等. 利用粒子群優化方法標定機械臂關節參數[J]. 機械設計與制造,2021,365(7):285-290.
[8] 陳爽,張橋. 基于PSO算法的工業機器人絕對距離自標定方法[J]. 制造業自動化,2021,43(4): 30-34.
[9] 王遠東,高潔. 3-R2U2S并聯機器人的機構參數標定法探究[J]. 機械傳動,2020,44(5): 121-125.
[10] 張旭祥,沈丹峰,劉夏軒德,等. 含關節間隙的并聯機器人運動誤差分析[J]. 西安工程大學學報,2020,34(1):91-97.
收稿日期:2023-01-31
