基于ADAMS的六關節工業機器人模態仿真分析研究
2024-08-28 00:00:00孔令超鐘成堡王長愷
機械制造與自動化 2024年2期



摘"要:針對工業機器人的動態特性,以六關節工業機器人為研究對象,應用有限元軟件NASTRAN和多體動力學軟件ADAMS搭建剛柔耦合模型,引入關節柔性,對其進行整機模態仿真分析方法的研究,采用試驗模態分析法進行了模態測試。通過對比仿真和試驗得到前10階固有頻率和振型,其固有頻率仿真相對誤差控制在10%以內,振型基本保持一致,從而驗證了六關節工業機器人整機模態仿真分析方法的準確性。進一步分析研究關節和關節臂剛性對機器人整機模態的影響規律,為整機剛柔耦合動力學分析、結構動態特性分析、結構優化設計和改進提供了一定的參考意義。
關鍵詞:工業機器人;關節柔性;剛柔耦合;模態分析;ADAMS;剛性
中圖分類號:TP242;TP391""文獻標志碼:A""文章編號:1671-5276(2024)02-0182-06
Research on Modal Simulation Analysis of Six-axis Industrial Robot Based on ADAMS
KONG Lingchao1, 2, ZHONG Chengbao1, 2, WANG Changkai1, 2
(1. Guangdong Provincial Key Laboratory of High Performance Servo System,Zhuhai 519030,China;
2. GREE Electric Appliances, Inc of Zhuhai,Zhuhai 519030,China)
Abstract:Based on the dynamic characteristics of industrial robot,and the six-axis industrial robot taken as the research object, the rigid-flexible coupling model is built by the finite element software NASTRAN and the multi-body dynamics software ADAMS. Joint flexibility is introduced to conduct the study on whole machine modal simulation analysis method, and the modal test is carried out by the experimental modal analysis method. By comparing the first 10 natural frequencies and modes obtained from simulation and test, the relative error of natural frequency simulation is controlled within 10%, and the modes are basically consistent, which verifies the accuracy of the whole machine modal simulation analysis method of six-axis industrial robot. The influence of joint stiffness and arm stiffness on robot mode is further analyzed and studied, providing references for the whole machine rigid flexible coupling dynamic analysis, structural dynamic characteristic analysis, structural optimization design and improvement.
Keywords:industrial robot;joint flexible;rigid flexible coupling;modal analysis;ADAMS;stiffness
0"引言
隨著工業機器人市場的快速增長,機器人廠家之間的競爭愈發激烈,機器人的設計面臨更輕的質量、更快的操作速度、更高的定位精度的挑戰,這對機器人的動態特性有很高的要求。傳統的機器人動態特性分析方法主要采用理論方程或有限元軟件對單關節臂和整機進行模態分析,為機器人結構動態特性的評估和改進提供了依據。徐稀文等[1]應用ANSYS軟件針對弧焊機器人的大臂分別進行了有、無預應力模態分析,但對機器人整機的模態分析研究更具有實際意義。程麗等[2]應用SolidWorks軟件對165kg焊接機器人3種典型位姿進行了模態分析,并針對結構薄弱環節提出優化設計建議,但其關節連接處的連結處理方式同真實情況具有一定的差異性。李世杰等[3]應用ANSYS對六自由度工業機器人典型姿態進行模態仿真和實驗分析,但機器人姿態無法快速調整,計算其他姿態模態需要重新建模。劉靜等[4]應用ANSYS和ADAMS對雙自由度機械臂進行剛柔耦合運動學分析,但僅考慮了機械臂的柔性,沒有引入關節的柔性。于靖軍等[5]分別從理論建模、有限元軟件、試驗測試3個方面對全柔性機器人進行了整機模態方面的研究,分析其動態特性,但3種方法所得的固有頻率相差較大。此外,單純應用有限元軟件進行模態分析存在位姿不同需重新建模的過程,同時也不便于后續進行剛柔耦合動力學仿真分析,難以有效、準確地評估機器人的動態特性參數,使得機器人樣機無法滿足設計要求。因此,本文針對六關節工業機器人,應用有限元軟件NASTRAN和多體動力學軟件ADAMS搭建六關節工業機器人剛柔耦合模型,進行整機模態分析,得到了機器人水平伸直位姿的各階固有頻率和振型。同時,本文應用試驗模態分析法對該機器人在同種位姿下進行了模態測試,從而驗證了六關節工業機器人剛柔耦合模型建立方法的準確性,為機器人整機剛柔耦合動力學分析、結構動態特性分析、結構優化設計和改進提供了理論依據。
1"幾何模型建立
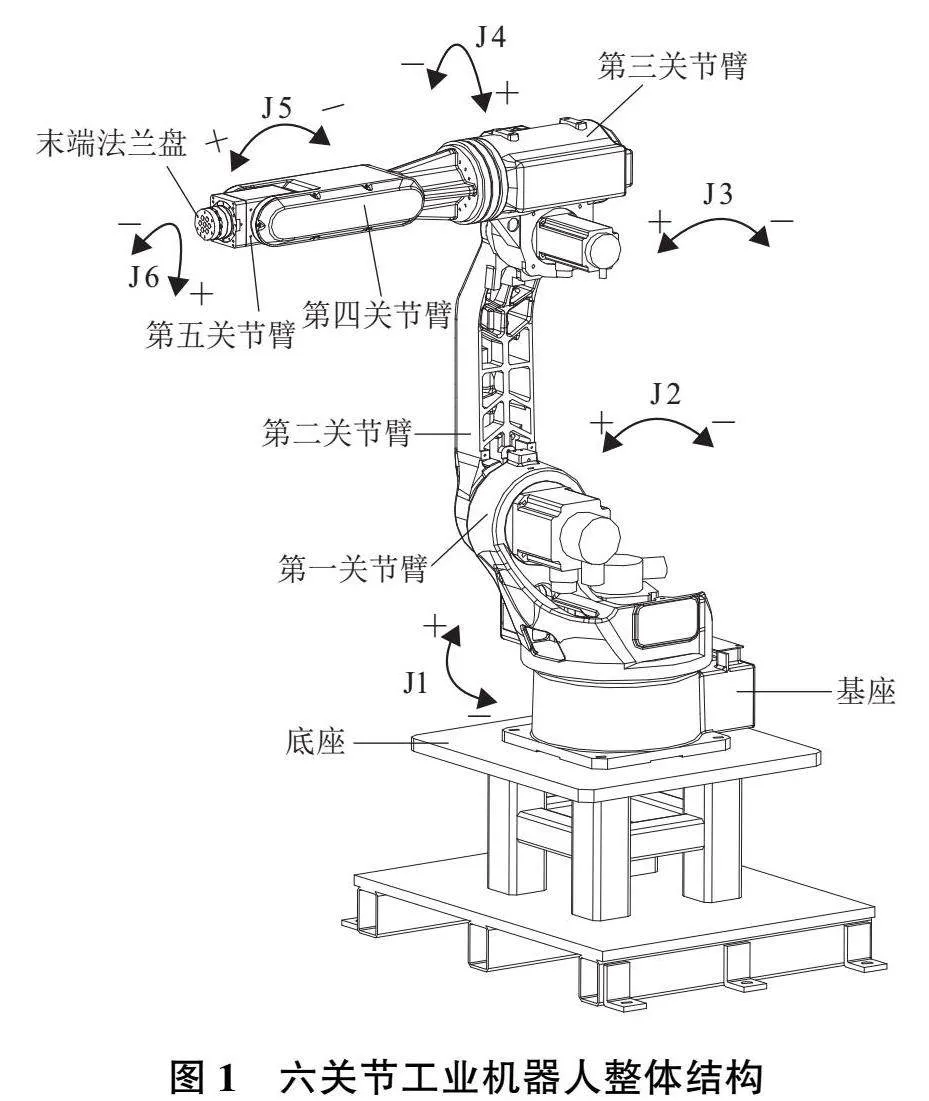
六關節工業機器人主要由基座、第一關節臂至第五關節臂、末端法蘭盤、第一電機至第六電機、第一減速機至第六減速機、各關節臂側板等組成,整機結構復雜。此外,進行整機模態試驗分析時,機器人安裝在底座上,因此,需要對底座進行同步建模。本文應用Creo軟件建立工業機器人的三維實體模型并忽略螺釘、密封圈、編碼器線、動力線、護線板等質量較輕、對整機仿真計算影響不大的零件。此外,為保證模型柔性處理時網格劃分的均勻性和質量以及計算效率,在建模過程中對模型進行一些簡化處理,主要處理有:1)刪除冗余倒角、圓角及螺紋孔;2)刪除螺釘、氣管接頭、皮帶等質量較輕而結構較復雜的零件。在對模型進行簡化的過程中,需經多次仿真驗證以確保模型簡化不會對仿真分析造成不可接受的影響。簡化后的六關節工業機器人結構示意圖如圖1所示。
2"仿真模態分析
模態分析是機械結構動態特性分析的一種方法,即分析機械系統的振動特性,包括固有頻率和振型[6]。通過對機器人整機的模態分析,可以在設計階段對整機結構的動態特性進行預測,進而找到機器人本體的薄弱環節,提出改進意見,實現機器人本體結構的動態設計。六關節工業機器人主要由關節臂和關節組成,兩者的柔性化均對整機模態分析具有較大的影響。本文應用NASTRAN軟件對關節臂進行柔性化處理,應用ADAMS/View模塊對關節進行柔性化處理并搭建整機剛柔耦合模型,最后應用ADAMS/Vibration模塊求解各階固有頻率和振型。
2.1"柔性關節臂的建立
通過ADAMS/Flex模塊從NASTRAN有限元軟件中讀取關節臂的模態中性文件(modal neutral file,MNF),從而實現機器人關節臂的柔性化處理。關節臂柔性化過程主要有:導入模型、賦予材料屬性、網格劃分、建立剛性區域和生成中性文件。
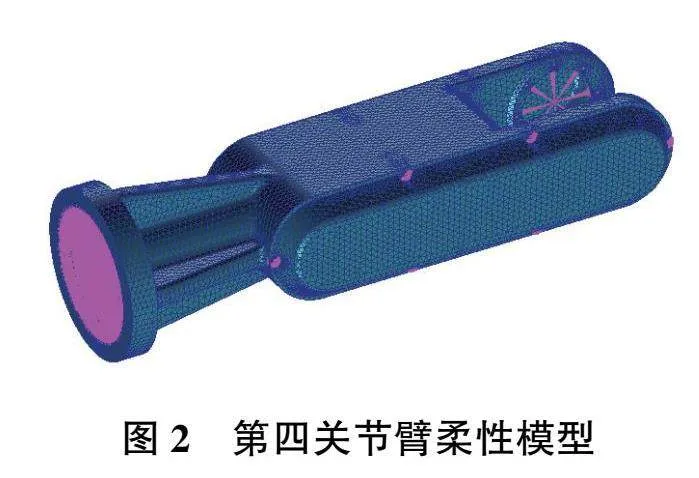
本文中需進行柔性化的關節臂有:底座、基座、第一關節臂至第五關節臂,分別將三維模型導入NASTRAN中,根據實際情況賦予材料屬性。由于關節臂模型結構復雜,選用四面體單元進行網格劃分。剛性區域包括剛性點和剛性面,其選取依據機器人裝配情況和運行情況,剛性點用于后續施加旋轉副、固定副等約束副,剛性面與剛性點連接。最后導出MNF文件。MNF文件主要包含了關節臂各節點的位置坐標與連通性、各節點質量與轉動慣量、各階模態、應力應變等信息。第四關節臂柔性模型如圖2所示。
2.2"柔性關節的建立
根據SPONG M W等[7-9]提出的柔性關節臂模型,目前在ADAMS中,主要采用扭轉彈簧或力矩的方式來表示機器人的關節柔性特性,但這兩種方式只有1個自由度,僅表示了機器人關節軸向的柔性而忽略了關節徑向的柔性,這對整機模態仿真分析具有一定的影響。
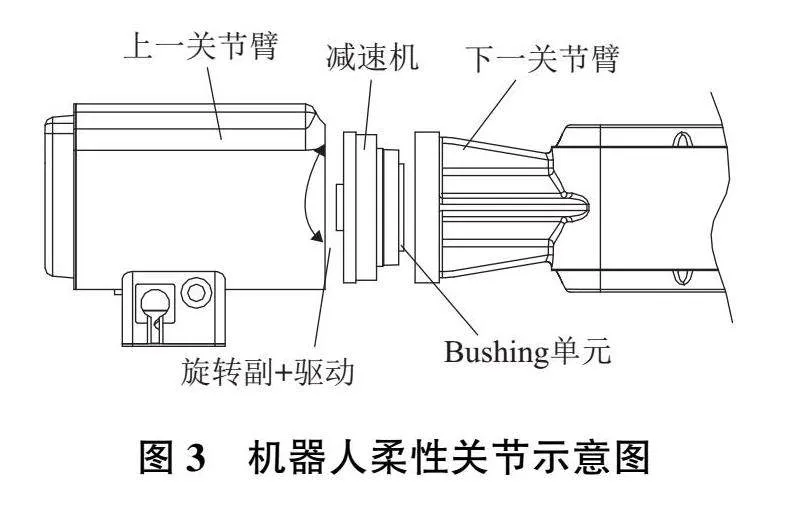
本文在此基礎上,提出采用Bushing單元(襯套)來表示機器人關節柔性。Bushing單元具有3個平移自由度和3個旋轉自由度,限制其平移自由度以保持關節臂與減速機不發生平移分離,軸向旋轉自由度采用減速機的扭轉剛度以近似等效關節軸向扭轉剛度,徑向旋轉自由度采用減速機主軸承的剛度以近似等效關節徑向扭轉剛度。機器人柔性關節示意圖如圖3所示。
由圖3可知,機器人關節的柔性化采用等效模擬的方法,上一關節臂和減速機之間施加旋轉副和驅動,減速機和下一關節臂之間施加Bushing單元。
2.3"剛柔耦合模型的建立
將六關節工業機器人三維模型導入ADAMS模型并用2.1節中生成的MNF文件替換原剛體模型。根據機器人實際運行情況施加固定副、旋轉副、Bushing單元等約束副,各軸施加驅動并賦予各驅動初始位置,使機器人初始平衡位姿為模態分析選取的整機位姿。本文選取水平伸直位姿進行有限元模態分析,機器人水平伸直剛柔耦合模型如圖4所示。
2.4"模態仿真
應用ADAMS/Vibration模塊對機器人整機剛柔耦合模型進行模態分析,通過ADAMS后處理得到各階模態的固有頻率和振型。本文提取了前10階的模態。
3"試驗模態分析
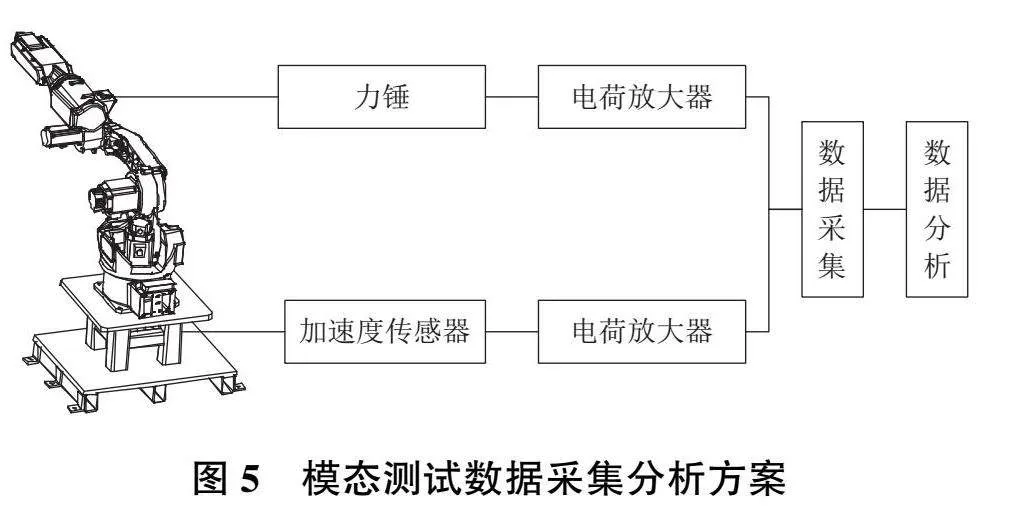
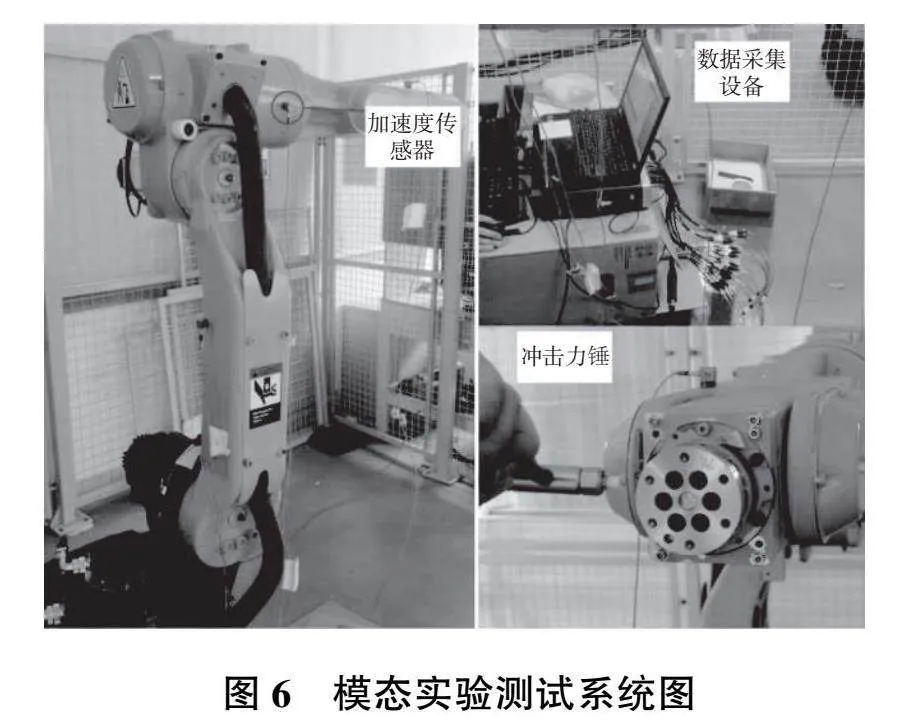
為驗證基于ADAMS的六關節工業機器人整機模態仿真分析的準確性,采用多點激勵、多點測量的脈沖激振法對機器人在水平伸直位姿下進行模態試驗。模態測試數據采集分析方案如圖5所示。
根據六關節工業機器人整機以及各部件的結構特點,在機器人上均勻布點:敲擊點和拾振點,采用力錘分別對敲擊點進行激振,采用加速度傳感器分別測試拾振點的響應信號。力錘內的力傳感器和拾振點的加速度傳感器同時記錄脈沖激勵和響應,傳入計算機中進行模態分析,得到六關節工業機器人在水平伸直位姿下各階固有頻率和振型。實驗測試如圖6所示。
4"結果分析
4.1"振型
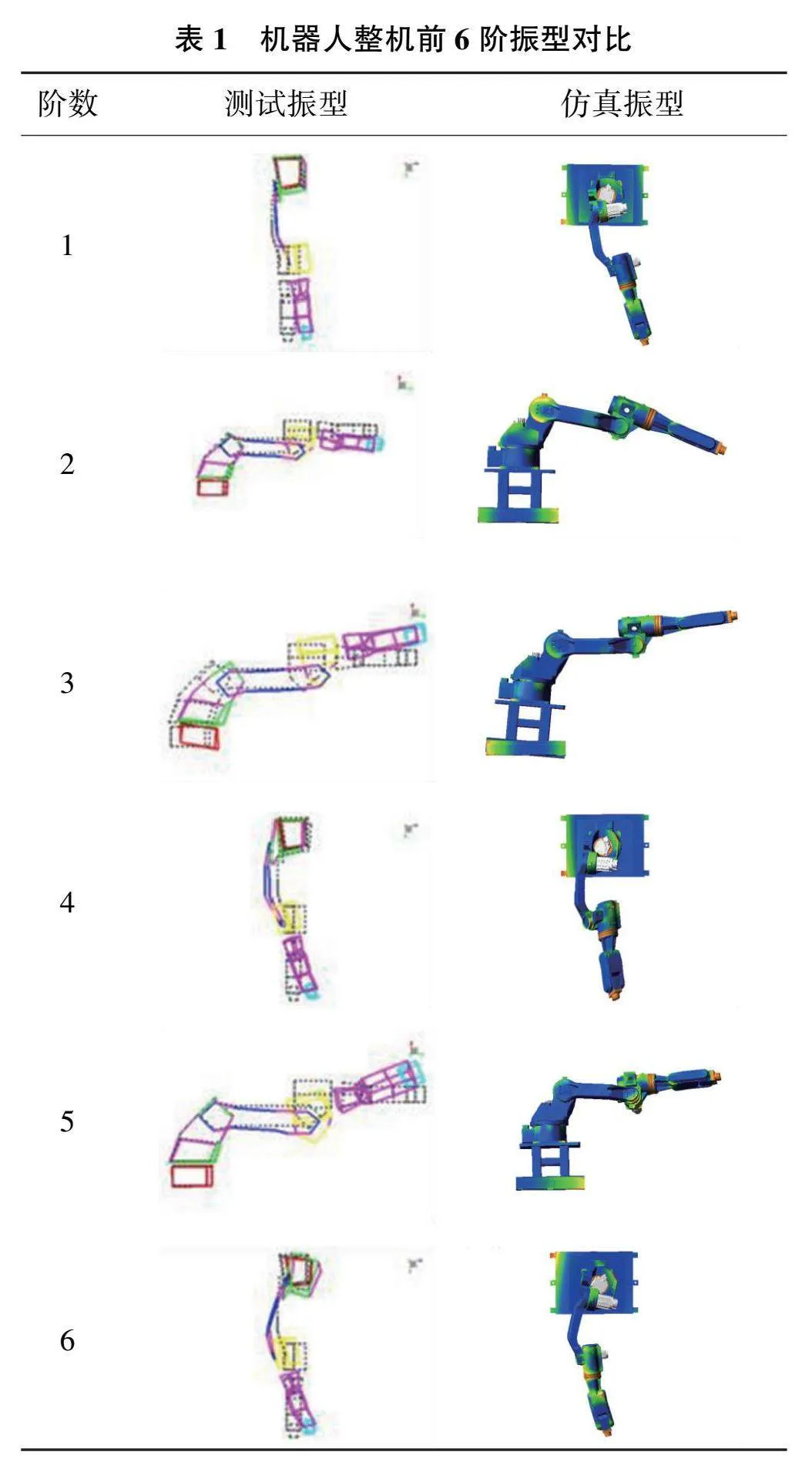
從仿真模態分析和試驗模態分析中分別提取機器人整機前10階振型,由于篇幅限制,僅列舉前6階振型進行對比,如表1所示。
由表1可知,前6階仿真振型同測試結果基本一致,第7—10階振型雖未列舉,但同測試結果基本一致,從而驗證了基于ADAMS剛柔耦合模型的整機模態仿真方法在振型方面的準確性。觀察水平伸直位姿下的模態振型可知,低階模態主要為整機的擺動、扭轉、彎曲模態。
4.2"固有頻率
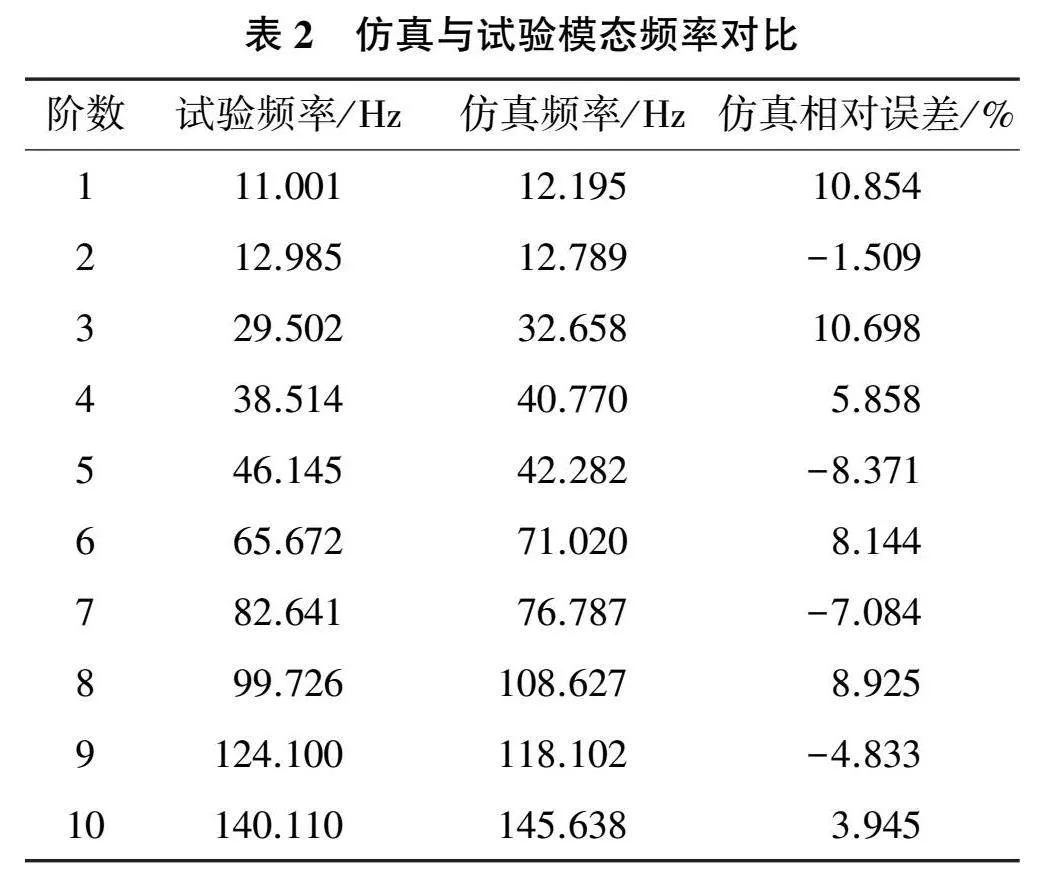
仿真與試驗模態分析固有頻率對比結果如表2所示。
由表2可知,除第1階和第3階固有頻率仿真相對誤差略大于10%以外,其他階固頻仿真相對誤差均在10%以內。從第1階和第3階的模態振型可知,其模態特性與底座具有一定的關系,通過對比底座實物和三維模型發現,底座實物存在較大的加工誤差。
由模態固有頻率可知,整機固有頻率較低,易發生共振現象,對機器人的精度會有較大影響,尤其是第1階和第2階模態,其振型為正交的整機擺動模態,固頻在11~13Hz之間,應重點關注。
5"剛度影響分析
在建立的仿真方法的基礎上,以某型號機器人為研究對象,分析研究關節剛度和關節臂剛度對機器人整機模態的影響規律。
首先對機器人水平伸直姿態(圖7)和初始“7”字型姿態(圖8)開展整機模態仿真計算,得到前6階模態頻率,然后分別對關節臂和關節進行剛性化處理,對比前后機器人模態頻率的變化情況。
5.1"關節臂剛性影響分析
將機器人的基座和5個關節臂分別設置為剛體并分別進行機器人整機模態仿真,將各關節臂剛性情況下模態頻率與原模態頻率做差,求得模態的變化率,分析各關節臂剛度對整機模態的影響。
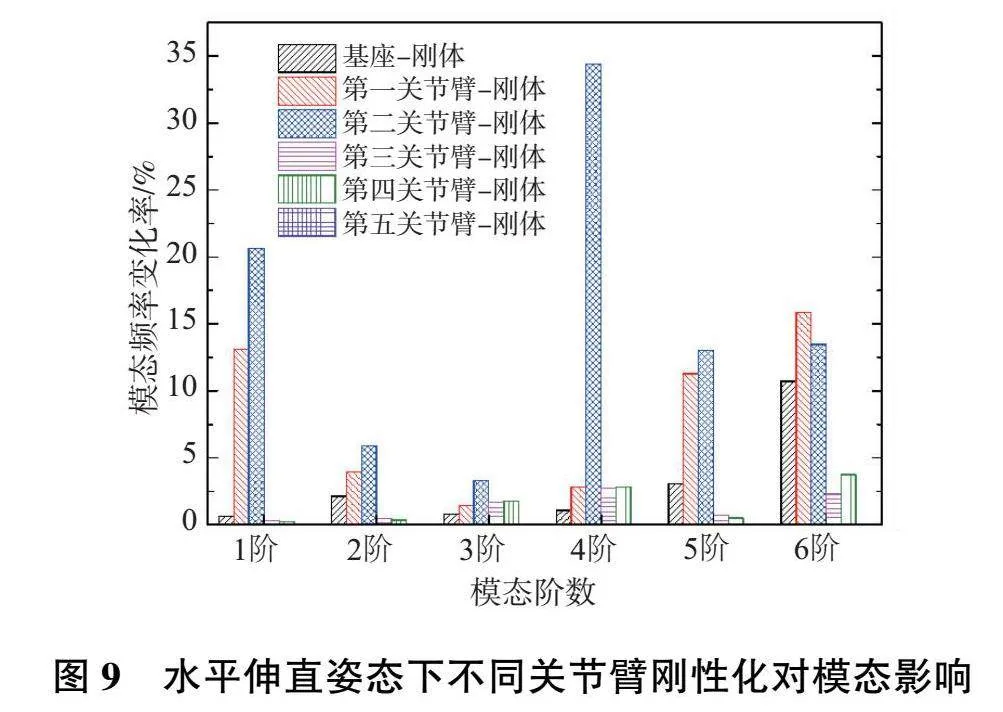
1)水平伸直姿態下不同關節臂剛性化對整機模態的影響如圖9所示。1階模態頻率主要受第一和第二關節臂的剛度影響較大,第二關節臂影響的模態頻率變化率達到20.6%;2階和3階模態頻率受關節臂剛度影響較小,模態頻率變化率都在6%以內;4階模態頻率主要受第二關節臂剛度影響顯著,模態頻率變化率達到34.4%;5階模態頻率主要受第一和第二關節臂剛度影響較大,6階模態頻率受第一關節臂影響較大。
水平伸直姿態下,第一關節臂和第二關節臂剛度對前6階模態有主要的影響,這進一步表明第一關節臂和第二關節臂的剛度相對較為薄弱,其中對比1階和2階模態頻率的變化率,結合模態的振型,說明第一和第二關節臂在左右擺動方向的剛度較弱。
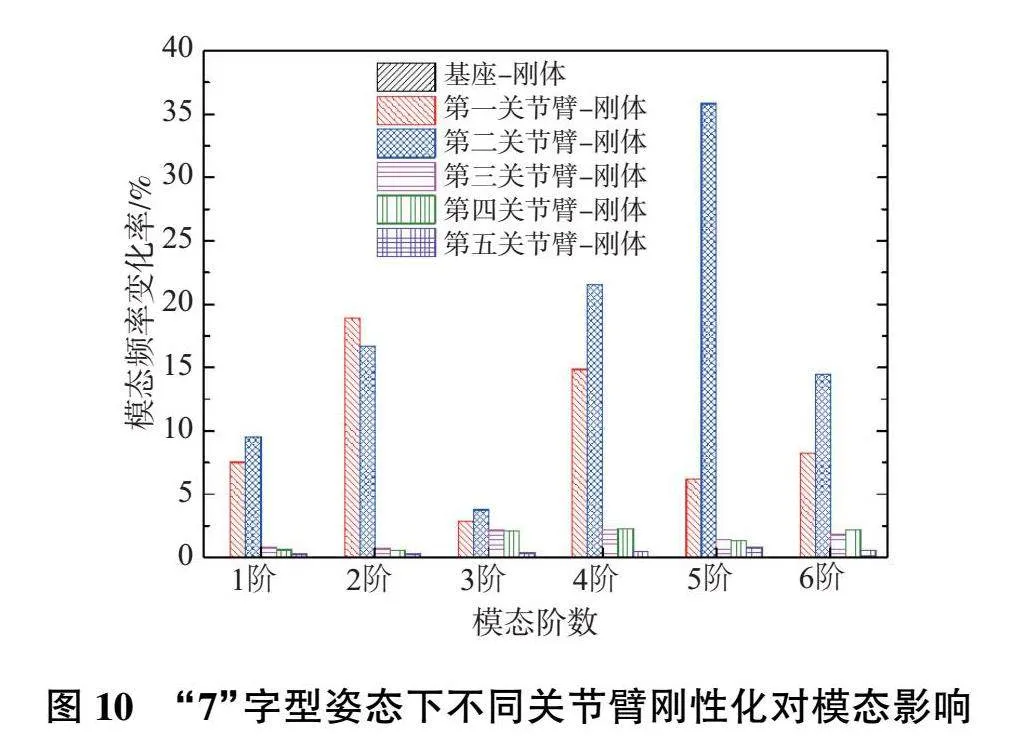
2)初始“7”字型姿態下不同關節臂剛性化對整機模態的影響如圖10所示。1階模態頻率主要受第一和第二關節臂的剛度影響較大,但頻率變化率都在10%以內;2階模態頻率同樣主要受第一和第二關節臂的剛度影響,第一關節臂影響的頻率變化率為18.9%;3階模態頻率受關節臂剛度影響較小;4階模態頻率主要受第一和第二關節臂剛度影響較大,第二關節臂影響的頻率變化率約21.6%;5階和6階模態頻率都主要受第二關節臂剛度影響較大,其中第二關節臂影響的5階模態頻率變化率達到35.8%。
在“7”字型姿態下,第二關節臂的剛度對整機各階模態有很重要的影響,相比于水平伸直姿態,因姿態的差別致使模態振型差異,第二關節臂剛度對各階模態影響的程度不同。
綜合以上分析可知,在水平伸直姿態和“7”字型姿態下,第一和第二關節臂剛度對前6階模態有顯著的影響,其他關節臂影響較小,第一和第二關節臂剛度本身較為薄弱。
5.2"關節剛性影響分析
將機器人的6個關節分別設置為剛性連接并分別進行機器人整機模態仿真,將各關節剛性情況下模態頻率與原模態頻率做差,求得模態的變化率,分析各關節剛度對整機模態的影響。
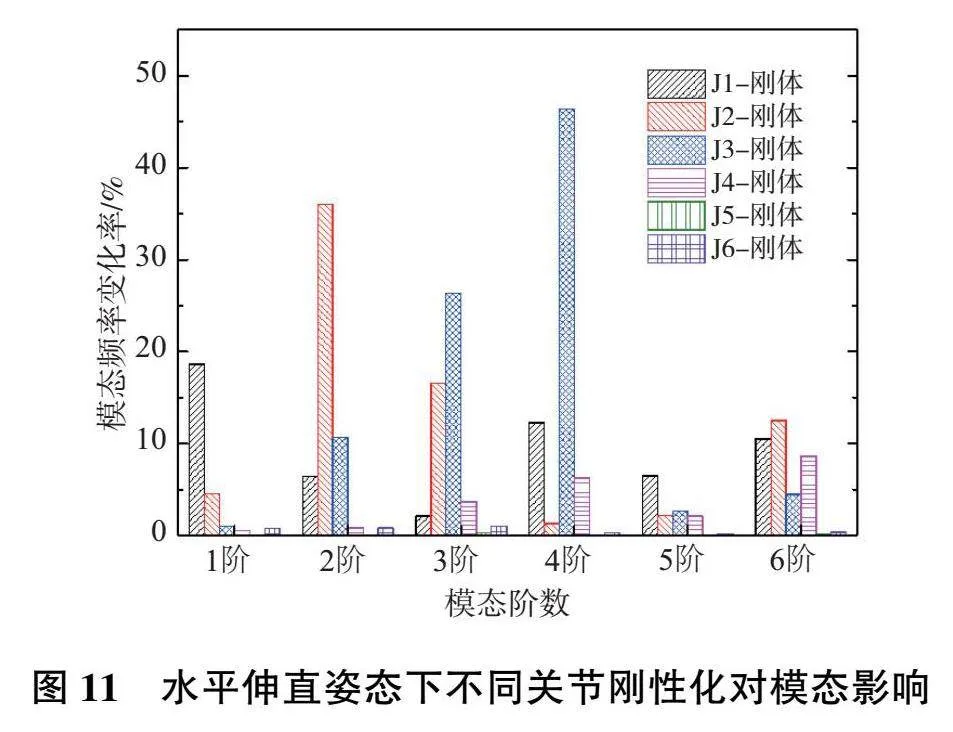
1)水平伸直姿態下不同關節剛性化對整機模態的影響如圖11所示,1階模態頻率主要受J1關節剛度影響,頻率變化率約為18.6%;2階模態頻率主要受J2關節剛度影響,頻率變化率約為36%;3階模態頻率受J2和J3關節剛度影響較大,頻率變化率分別為16.6%和26.4%;4階模態頻率主要受J3關節剛度影響較大,頻率變化率達到46.3%;5階模態頻率受關節剛度影響較小;6階模態頻率受J1和J2關節剛度影響相對較大。
水平伸直姿態下,J1、J2和J3關節剛性對前6階模態有主要影響,結合水平伸直姿態下各階模態的振型,關節剛度影響程度高的模態振型與關節旋轉方向一致,即關節扭轉剛度是影響機器人模態的主要因素。
相比于關節臂剛性的影響,關節剛性對機器人2/3/4階的模態影響程度更大,因為低階模態振型主要以擺動、彎曲振型為主,與關節旋轉方向一致。
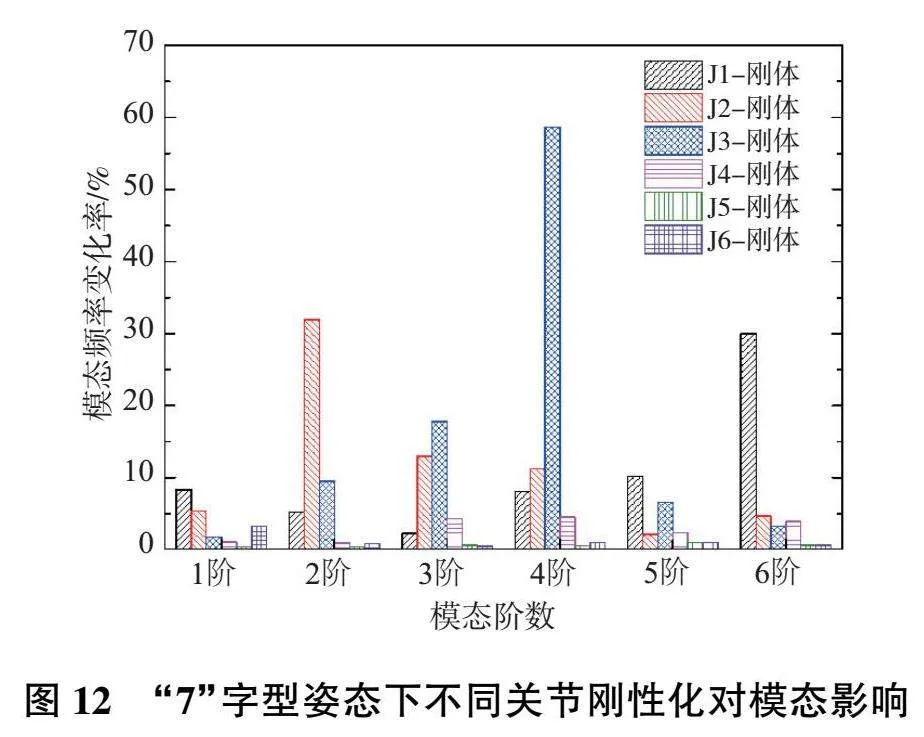
2)初始“7”字型姿態下不同關節剛性化對整機模態的影響如圖12所示。1階模態頻率受關節剛度影響相對較小;2階模態頻率主要受J2關節剛度影響較大,頻率變化率約31.9%;3階模態頻率受J2和J3關節的剛度影響較大,其中J3關節剛度影響的頻率變化率約為17.8%;4階模態頻率受J3關節剛度影響較大,頻率變化率達到58.6%;5階和6階模態主要受J1關節剛度影響較大,6階模態頻率變化率約為30%。
“7”字型姿態下,J1、J2和J3關節剛性仍對前6階模態有主要影響,同樣因與水平伸直姿態的差異致使模態振型差別,致使對各階模態影響程度不同。
相比于關節臂剛性的影響,關節剛性對2/3/6階整機模態影響程度更大,主要因關節剛度小于關節臂本身的結構剛度。
綜合以上分析可知,在水平伸直姿態和“7”字型姿態下,J1、J2和J3關節剛度對前6階整機模態的影響占主導地位,其他關節影響較小。
6"結語
本文采用有限元軟件對機器人關節臂進行柔性化處理,采用Bushing單元對機器人關節進行柔性等效模擬,建立了六關節工業機器人整機剛柔耦合模型,開展整機模態仿真和試驗測試驗證,同時分析關節臂和關節剛性對整機模態的影響,得出以下結論。
1)六關節機器人整機模態仿真與試驗模態對比分析,模態頻率相對誤差在10%以內,振型基本保持一致。結果表明,所建立的機器人整機模態仿真分析方法具有較高的準確性,可用于后續整機剛柔耦合動力學仿真分析、結構動態特性分析,為結構優化設計和改進提供理論依據。
2)六關節工業機器人整機的模態主要集中在低頻段,振型主要為整機的擺動、扭轉和彎曲,其中,第1階和第2階模態振型為正交的整機擺動模態,且固頻較低,有必要對機器人結構進行改進設計,以提高整機剛性。
3)六關節工業機器人在水平伸直姿態和“7”字型姿態下,第一和第二關節臂剛度對前6階模態有顯著的影響,其他關節臂影響較小。J1、J2和J3關節剛度對前6階整機模態的影響占主導地位,其他關節影響較小。
參考文獻:
[1] 徐稀文,平雪良,陳魯剛,等. 弧焊機器人大臂結構模態分析[J]. 機械設計與制造,2012(6):151-153.
[2] 程麗,劉玉旺,駱海濤,等. 165kg焊接機器人有限元模態分析[J]. 機械設計與制造,2012(1):147-149.
[3] 李世杰,李飛,馬建龍,等. 六自由度工業機器人的模態仿真與實驗[J]. 機械設計與制造,2018(12):157-159,163.
[4] 劉靜,林沖,郭世財. 基于ADAMS和ANSYS的機械臂剛柔耦合運動學分析[J]. 機床與液壓,2020,48(17):25-28,107.
[5] 于靖軍,畢樹生,宗光華,等. 全柔性機器人機構結構動力學分析方法研究[J]. 機械工程學報,2004,40(8):54-58.
[6] 趙欣翔. 考慮關節柔性的重載工業機器人結構優化研究[D]. 哈爾濱:哈爾濱工業大學,2013.
[7] SPONG M W. Modeling and control of elastic joint robots[J]. Journal of Dynamic Systems,Measurement,and Control,1987,109(4):310-318.
[8] ABELE E, BAUER J, BERTSCH C, et al. Comparison of implementations of a flexible joint multibody dynamics system model for an industrial robot[C]// 6th CIRP International Conference on Intelligent Computation in Manufacturing Engineering,Naples, Italy: [s.n.],2008.
[9] ABELE E, BAUER J, HEMKER T, et al. Comparison and validation of implementations of a flexible joint multibody dynamics system model for an industrial robot[J]. CIRP Journal of Manufacturing Science and Technology,2011,4(1):38-43.
收稿日期:20221017
