基于倍福嵌入式PLC的氣囊封堵控制系統設計
2024-08-28 00:00:00陳思孫強
機械制造與自動化 2024年2期


摘"要:在市政排水管道工程施工中,施工人員下井進行氣囊封堵是管道封堵最常用的方式之一。針對目前井下人工封堵氣囊時管理難度大、效率低下等問題,設計一種基于倍福嵌入式PLC的氣囊封堵控制系統。該控制系統以倍福C6015為核心,將步科SZ7GE作為人機界面,通過多種傳感器融合技術判定井口位置信息,研究用機器設備代替人工下井封堵氣囊的可能性。實驗結果表明:工作人員能夠直接通過人機界面操作封堵氣囊,無需人工下井,提高了自動化程度。
關鍵詞:人工下井;倍福嵌入式PLC;封堵氣囊;人機界面;多種傳感器融合技術
中圖分類號:TP273""文獻標志碼:B""文章編號:1671-5276(2024)02-0266-05
Design of Air Bag Sealing Control System Based on
Beckoff Embedded PLC
CHEN Siwen, SUN Qiang
(Hefei Hagong Zhiling Intelligent Technology Co., Ltd ., Hefei 230051,China)
Abstract:In the construction of city drainage pipeline engineering, frogmen descending the well to block air bag is one of the most common jobs in pipeline sealing. To overcome the difficulty in management and improve the low efficiency of air bag blocking, an air-bag plugging control system based on Beckoff embedded PLC is designed. With the very system, Beckoff C6015 is taken as the core and Kinco SZ7GE is applied as the human-machine interface to determine well entrance positions by ingretated technology of multi-sensors, and the probability of machine replacing manual air-bag blocking is studied. Experiment results show that staff can directly plug the air bag through the human-machine interface without manual downhole, which upgrades automation level.
Keywords:frogman goes down well;beckoff embedded PLC;block air bag;interface;ingretated technology of multi-sensors
0"引言
在市政工程中,尤其是在污水管道的施工中,經常需要將污水管道進行局部封堵,并把污水管道中的水抽出,以利施工人員進入污水管道中作業。傳統的污水管封堵方法是采用封堵氣囊堵水。
封堵氣囊堵水的工作原理就是利用優質橡膠做成的管道封堵氣囊,通過充氣方法使其膨脹,當堵水氣囊內的氣體壓力達到規定要求時,堵水氣囊填滿整個管道斷面,利用管道封堵氣囊壁與管道產生的摩擦力堵住漏水,從而達到目標管段無滲水的目的。
在現有技術中,該氣囊必須由施工人員(俗稱蛙人)下井封堵,當井水水位較高時,因壓力過大封堵比較困難,并且井內存在氯化氫等有毒氣體,全國每年都發生若干起傷亡事故。
為此,本文設計一種基于倍福嵌入式PLC的氣囊封堵控制系統,包括井上控制系統和井下執行機構,井上控制系統和井下執行機構分開設計,抗干擾、防震、防水效果更好。對機器人進行控制的內容包括機器人升降伺服控制、擺臂伺服控制、行走伺服控制、推桿伺服控制等,直到將氣囊推到橫井里。本系統自動化程度高,只需要人在井上進行觸摸按鍵操作即可,無需下井,有效避免事故的發生。
1"系統控制方案的設計
1.1"系統概述
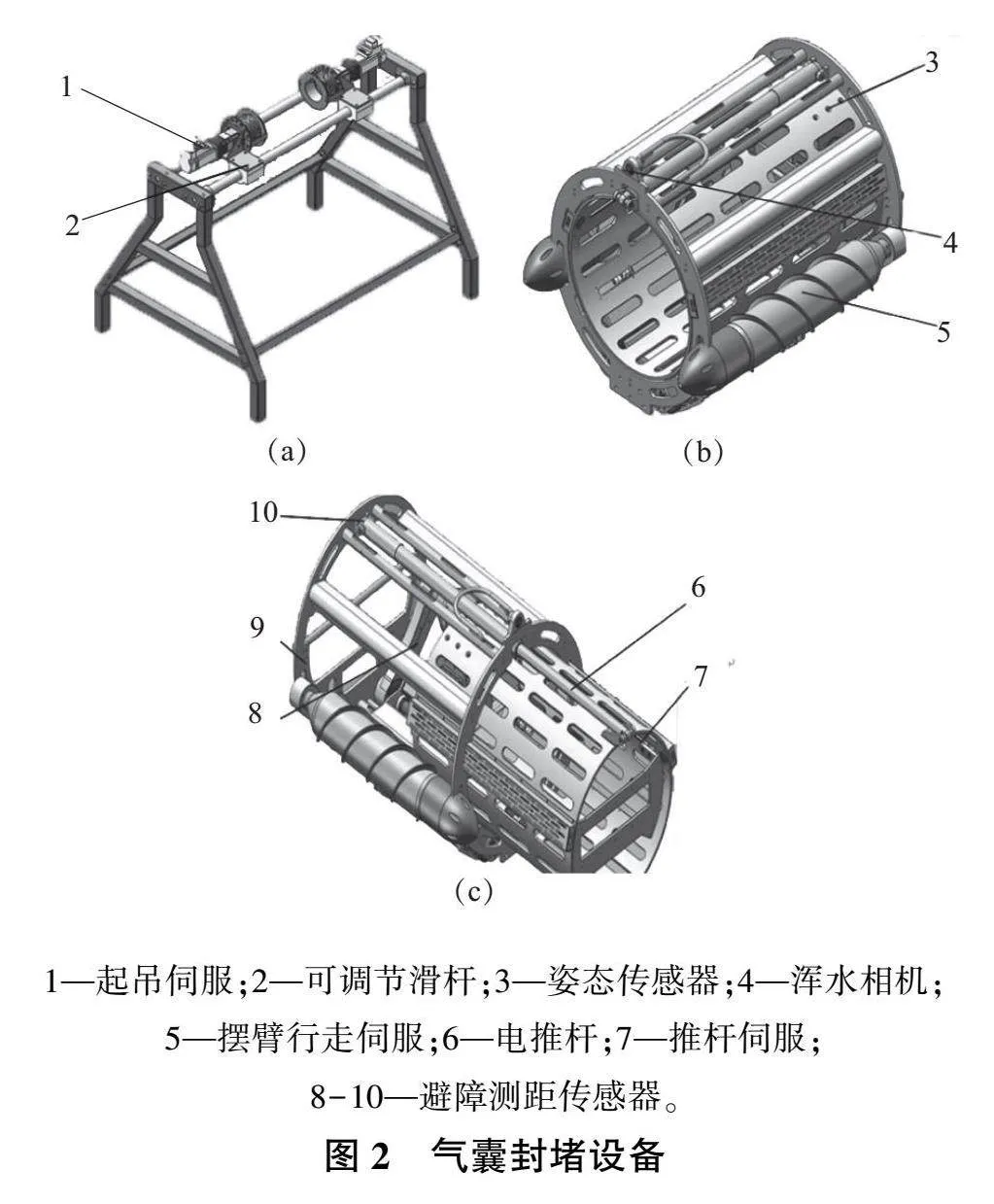
氣囊封堵控制系統設計主要包括井上控制系統和井下執行機構。井上控制系統主要包括卷盤滾筒、排線絲桿、便攜式移動電源、控制箱、井上起吊伺服、可調節滑桿等。控制箱內含有倍福嵌入式PLC、漏電保護器、浪涌保護器、接觸器、空氣開關、電源轉換模塊、按鈕指示燈等[1]。井下執行機構主要包括行走伺服、擺臂伺服、推桿伺服、渾水相機、姿態傳感器、避障傳感器、電推桿、電磁鐵等,如圖1和圖2所示。
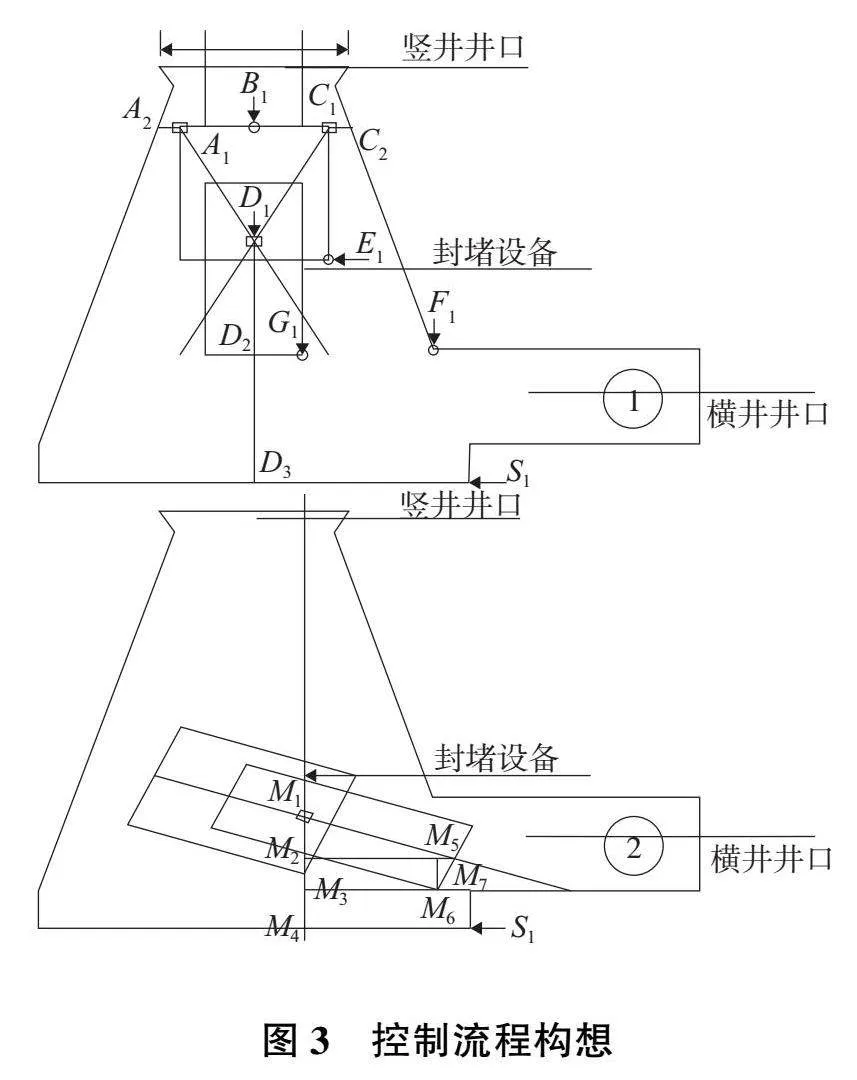
1.2"控制流程構想
整個控制流程構想如圖3所示。姿態傳感器位于圖3的B1位置,實時檢測機器人的旋轉角度θ,避障測距傳感器3組分別安裝在圖3的A1、C1、D1位置,渾水相機和聲納裝在圖3的E1位置。
氣囊封堵機器人本體通過井上伺服控制往豎井里下落,避障測距傳感器A1/C1實時監測到管壁的距離,通過井上滑桿控制兩邊的距離A1A2=C1C2;避障測距傳感器D1實時檢測到豎井底部的距離,D2D3=100mm。已知D1D2=600mm,避障測距傳感器D1實時數值S0=D1D2+D2D3,即一旦S0=700mm,氣囊封堵機器人停止下降;通過井上伺服控制機器人旋轉,直到橫井上邊沿F1點與相機E1中心點在一條直線上,停止旋轉。繼續通過井上伺服控制機器人下降,直到機器人底部到井底的距離M6=50mm,即M3M4=50mm。已知M1M4和M1M7之間的夾角為實時檢測機器人的旋轉角度θ,避障測距傳感器D1實時數S0=M1M2+M2M3+M3M4,推導出S0-M1M2-M2M3=50mm,已知M1M2=M1M7· cosθ=600· cosθ,已知M2M3=M5M6=M6M7·sinθ=180· sinθ,推導出當S0=600· cosθ+180· sinθ+50時,機器人停止下降。重復上述步驟,直到θ=90°,機器人下降和旋轉結束。
擺臂伺服撐起機器人本體,行走伺服用于機器人本體移動前進,電推桿開始一級推出,推桿伺服進行二級推出,直至氣囊推送到指定位置;推桿伺服回到原點,擺臂伺服收回到原點,井上伺服控制機器人本體上升直到井上,封堵結束。
2"硬件系統的設計
2.1"控制器及電機選型
本控制系統采用嵌入式PLC為核心控制器,通過Ethercat通信控制伺服,相比傳統的PLC,實時性更好、通信時間減小、安全性更高[2]。所采用的執行機構為直流一體化伺服電機,相比傳統電機而言,其性能高、響應快、節約空間、減小布線和安全性高。
2.2"控制電路
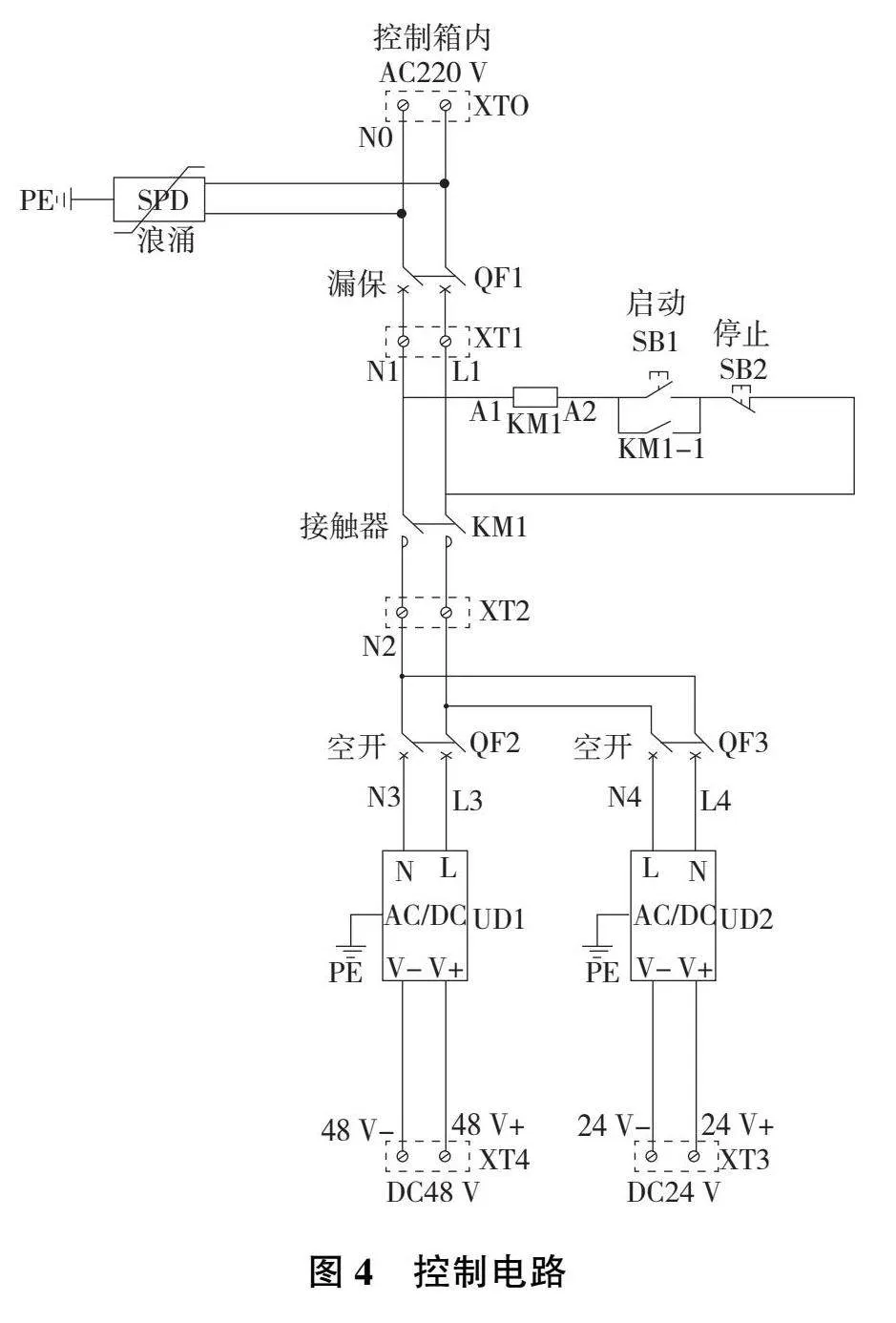
控制系統的電路主要分為主電路和控制電路,主電源采用便攜式移動電源提供的220V交流電,通過開關電源分別轉換為主要給伺服電機供電的DC48V,主要給嵌入式PLC及模塊等供電的DC24V,控制電路是交流接觸器配合啟停按鈕實現的[3]。控制電路如圖4所示。
2.3"PLC的外圍接線
考慮到控制系統的控制情況,需要將輸入、輸出點和PLC的外部接線相連接,包括按鈕開關、指示燈、限位開關、電推桿、電磁鐵[4],如圖5所示。
3"軟件系統的設計
此系統的軟件和程序設計采用Twincat3軟件。Twincat3是Beckhoff公司的運動控制軟件,基于Windows操作系統。基于Windows控制和自動化技術Twincat(the windows control and automation technology)自動化軟件是控制系統的核心部分,相比傳統的PLC軟件,此系統開放性更強,與上位機兼容性更高,實時性更快。
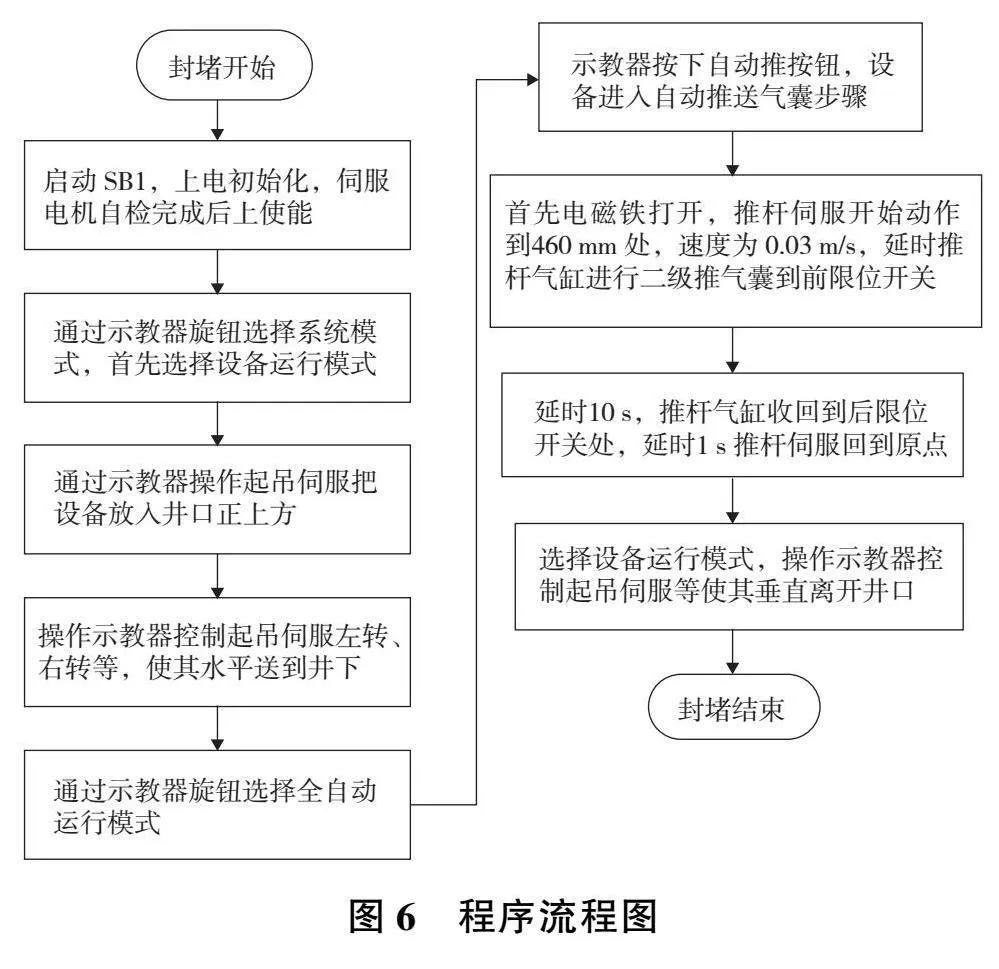
3.1"程序流程圖
根據控制要求,通過Twincat3軟件對氣囊封堵控制系統進行設計,該系統的程序流程圖如圖6所示。
3.2"輸入輸出地址分配
該系統的輸入點分配地址:I0.1接電源控制箱SB1停止按鈕,I0.2接手持觸摸屏SB2自動按鈕,I0.3接手持觸摸屏SB3遠程按鈕,I0.4接手持觸摸屏SB4復位按鈕,I0.5接手持觸摸屏SB5急停按鈕,I0.9接電推桿的前限位開關,I0.10接電推桿的后限位開關。
該系統的輸出點分配地址:Q0.1接蜂鳴器,Q0.9接電推桿推繼電器線圈KA1-14,Q0.10接電推桿收繼電器線圈KA2-14,Q0.11接電磁鐵繼電器線圈KA3-14。
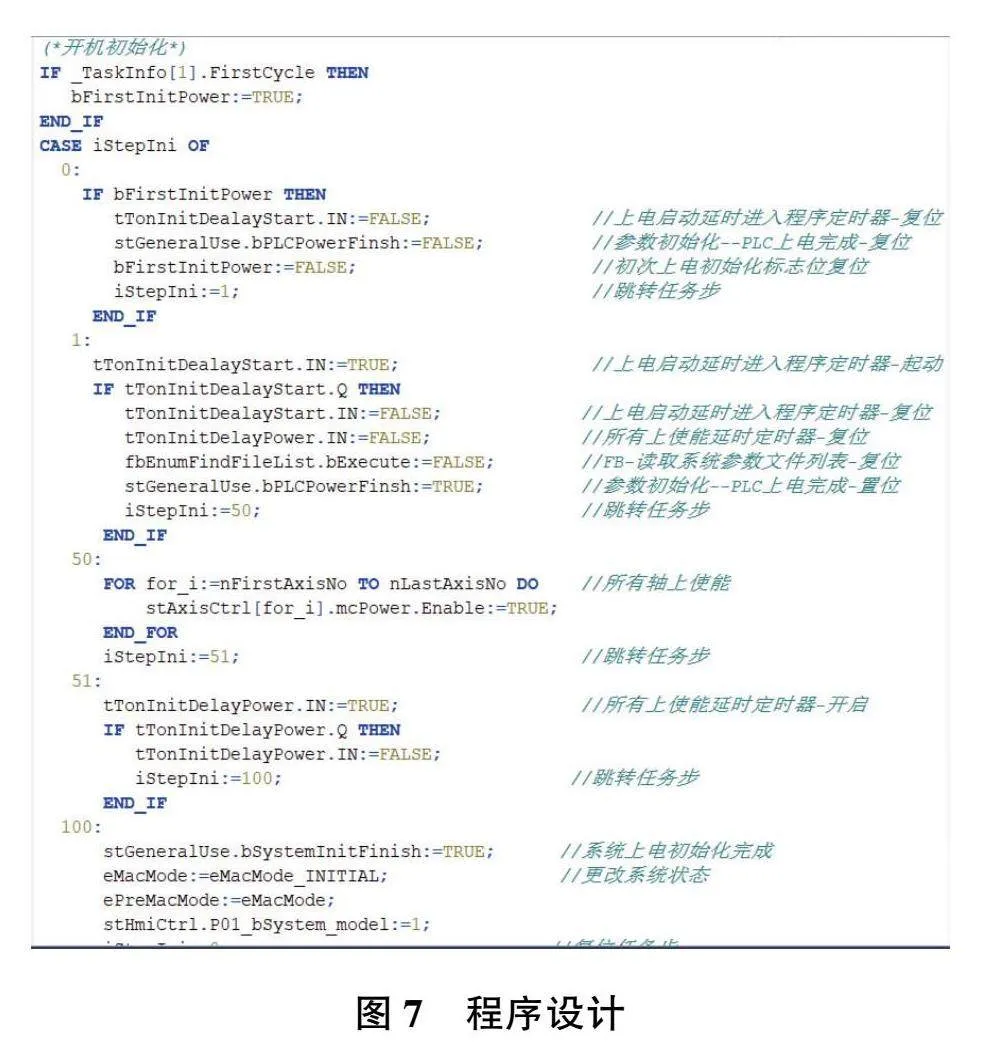
3.3"程序設計
倍福嵌入式PLC 編程語言主要有梯形圖語言(LD)、結構化語言 (ST)、順序功能圖 (SFC)、高級語言等;本方案主要采用Twincat3軟件進行ST語言設計程序,是基于ST語言對于多伺服總線控制功能塊調用及浮點數處理較為方便的考慮。程序設計如圖7所示。
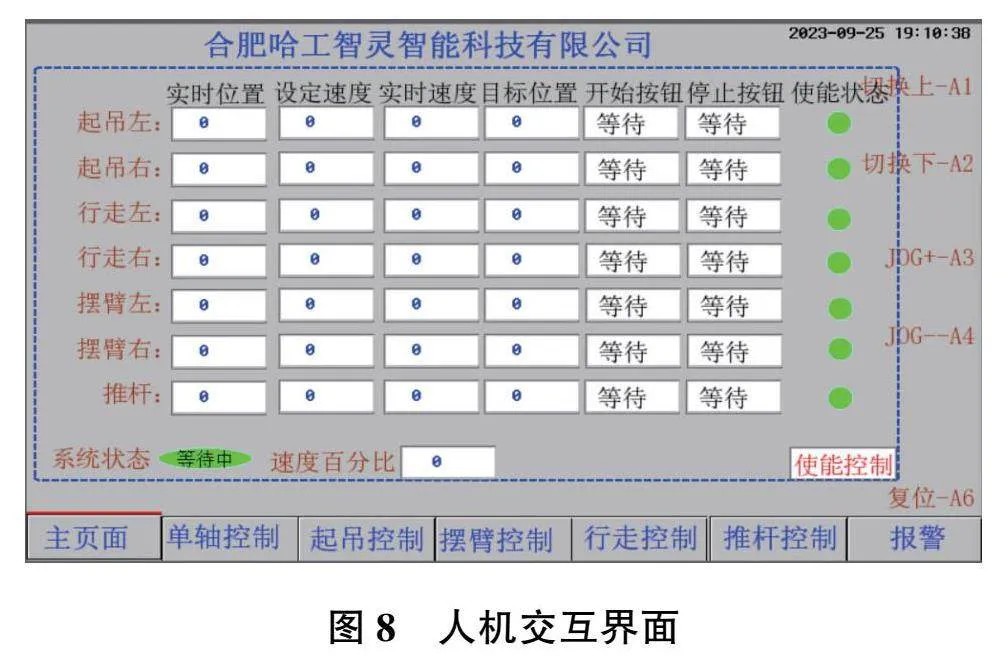
3.4"人機交互界面設計
上電初始化完成后,設備進入單軸調試狀態,使能狀態全部亮紅燈。此時可以進行單軸控制,設定速度和位置可以對單軸進行操控;檢查設備沒有異常報警時,可以撥示教器的旋鈕開關進入設備運行模式,此時起吊左右伺服、行走左右伺服、擺臂左右伺服進入耦合狀態,可以在對應界面進行前進、后退、轉彎的操作,同時通過姿態等傳感器信息判斷位置,把設備從井上順利送入井口位置;然后撥示教器的旋鈕開關進入全自動運行模式,程序自動控制電磁鐵、推桿伺服、電推桿進行二次推送把氣囊送到指定位置后回來;最后撥示教器的旋鈕開關進入設備運行模式把設備再從井下吊上井口完成整個氣囊封堵過程。人機交互界面如圖8所示。
4"驗證結果
4.1"驗證方案
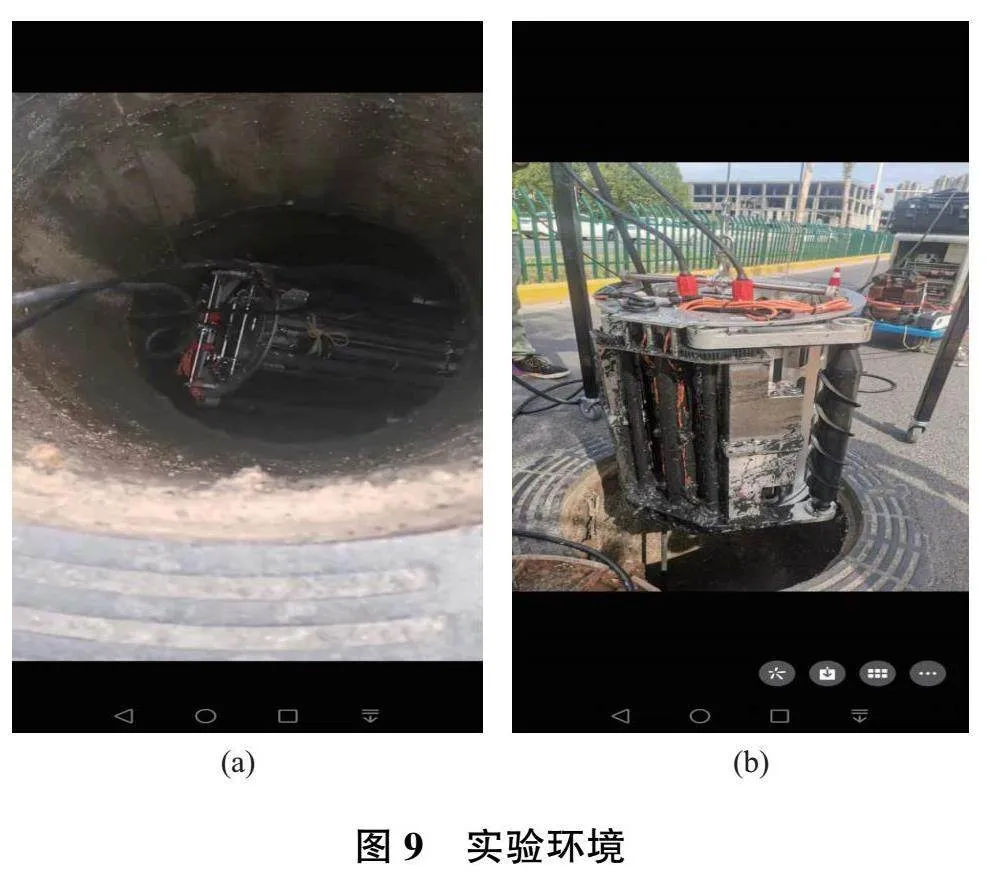
為了驗證控制流程構想和設備操作的可行性,現將氣囊封堵設備應用于實際的管道井口測試,實驗環境如圖9所示。
4.2"驗證過程
操作人員通過人機交互界面,首先把氣囊封堵設備垂直于井口吊起,再通過多種傳感器融合技術(姿態、避障、渾水相機等)對井下水平井口位置進行判定,按照控制流程步驟最終把設備送到井口位置,最后通過設備機構把氣囊推到井口位置,機構再按原路徑返回。
4.3"結果分析
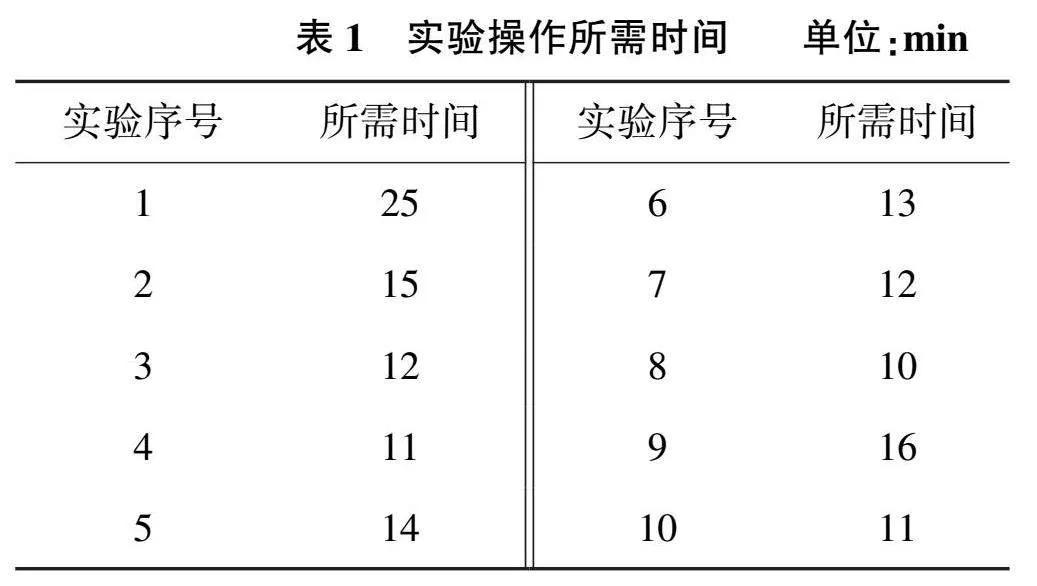
操作人員通過人機交互界面總共進行10次操作,操作時間如表1所示。
為了便于計算,實驗數據取整處理,去掉最高和最低值,平均時間為13min,即本氣囊封堵設備可以代替人工下井,封堵時間為13min左右,大約等于人工封堵的時間,由此驗證了所設計的系統能夠有效地解決人工下井封堵氣囊的困境。
5"結語
本文設計了一套氣囊封堵機器人系統,完全代替人工下井進行封堵,具有顛覆性的意義。其自動化程度高,減少惡劣的工作環境造成的安全事故。該系統具有技術成熟、價格低廉、功能齊全等特點,并且操作界面交互性強,簡單明了,解決了人工下井封堵氣囊的困境。該設計改變了我國管道封堵人工必須下井的現狀,具有廣泛的社會價值。
參考文獻:
[1] 尹澤遠,雷澤勇,雷潔珩,等. 基于PLC的地浸機械式管道清洗裝置控制系統的設計[J]. 機械研究與應用,2020,33(6):153-156,160.
[2] 胡云成,唐磊,何祥,等. 基于倍福PLC的779型條盒包裝機煙包制動系統的改造[J]. 包裝工程,2021,42(11):227-232.
[3] 鄒鑫,何文雪,牛杰. 基于SIMATIC S7-1500PLC的電梯監控系統設計[J]. 機械制造與自動化,2022,51(2):216-219.
[4] 于麗麗,雷聲媛. 基于PLC控制的紅棗無損自動分揀系統設計[J]. 機械制造與自動化,2021,50(5):215-218.
收稿日期:20220927
